激光多普勒测振仪
LDV激光测振与3D视觉传感技术融合的实践与展望

LDV激光测振与3D视觉传感技术融合的实践与展望严建伟(浙江舜宇智能光学技术有限公司,浙江省杭州市310000)摘要:随着LDV激光测振技术与3D视觉技术的迅猛发展,两项应用性技术的有效结合及融合发展的产品已广泛应用于各行业.同时衍生出应用于不同领域、具有各种特殊功能性的科技产品.着重介绍相关产品的研发实践过程和产品展望.关键词:3D视觉;激光测振1引言随着智能化产业的高速发展,3D视觉技术与LDV 测振技术融合的产品,已广泛应用于工、农、医和物联网等产业,并呈落地之势。
本文以应用实例,全面论述了融合技术的产品发展过程和未来产品趋向。
2振动概述2.1振动起源在大自然、人们日常生活中,振动是常见的一种自然现象。
古代,智慧的劳动人民就已发现釆用振动的方式可以清理掉衣物表面上的尘埃。
17世纪初,伽利略开始了研究单摆周期和物体振动;17世纪中叶,荷兰物理学家克里斯蒂安•惠更斯(Christiaan Huygens)从系统理论上对振动展开了深入研究。
2.2振动分类振动可分为宏观振动和微观振动。
在大规模机械加工过程中,不良振动会导致机械加工件表面光洁度不合格,影响产品质量。
在加工过程中,过度的不良振动会对机床寿命、刀具的磨损度产生直接影响。
交通运输上,航空飞行器上出现的机翼猛烈振动,会导致机毁人亡事故。
建筑工程上出现的失控振动,将导致建筑物墙体开裂及整体倒塌。
2.3振动的基本参数及相关公式可用于正弦或余弦函数描述的振动过程称为简谐振动,振动的参数有位移、速度和加速度。
振动位移X=^sin(®r+^>)(1)振动速度V=—=Aa)sin\ot+<Z>+—|(2)d/I2)振动加速度a==Aa)2sin^coT+0+n)(3)式中,&为振动的最大值,称为振幅;®为园频率。
振动三要素为振幅4、频率/和相位角0。
2.4振动检测分类在工农业生产过程及人们日常生活中,振动的安全检测控制甚为重要。
激光多普勒测速仪介绍(LDV)讲解

激光多普勒测速仪
1 激光多普勒测速仪概念
激光多普勒测速仪(LDV: Laser Doppler Velocimetry,是应用多普勒效应,利用激光的高相干性和高能量测量流体或固体流速的一种
仪器,它具有线性特性与非接触测量的优点,并且精度高、动态响应快。
由于它大多数用在流动测量方面,国外习惯称它为激光多普勒风
速仪(Laser Doppler Anemometer,LDA,或激光测速仪或激光流速仪(Laser Velocimetry,LV的。
示踪粒子是利用运动微粒散射光的多普勒频移来获的速度信息的。
因此它实际上测的是微粒的运动速
度,同流体的速度并不完全一样。
幸运的是,大多数的自然微粒(空
气中的尘埃,自来水中的悬浮粒子)在流体中一般都能较好地跟随流动。
如果需要人工播种,微米量级的粒子可以同时兼顾到流动跟随性
和LDV测量的要求。
多普勒激光测振仪扫描式激光测振仪影像测量仪

Hale Waihona Puke 应用领域MEMS器件(微机电系统)的振动特性 连续的频域振动特性 MEMS的故障分析以及可靠性测试 MEMS运动特性分析
参数
点直径 频率响应范围 最大测量速度
低通滤波 * 可定制
物镜
MLV-100 显微激光测振仪
10um *
1Hz–100KHz,50KHz-1.5MHz *
面外
50mm/sec ,500mm/s,3m/sec
30mm 120mm/s,12m/s(可选)
5Hz~100kHz 1.00%
4um/s,400um/s(可选) 1.6nm 0.04nm
0.00157g 0.063g
11
显微激光测振仪
简介
MLV-100显微激光测振仪通过显微光学系统可实现对微小 物体的振动测量,使激光光斑达到微米量级,提高测量的准确 性,并可通过显微成像系统实时观察物体的振动状态。
特点
对各类型振动进行非接触测量 多功能和精确的算法提供所有有用信息 动态测量范围广 >90dB 设计紧凑、结构牢固 使用红色激光,安全可见 完整的解决方案:包含了光学、信号处理、软件以及数据采集 便携,可固定于三角架
2
3
远距离激光测振仪
简介
LV-S01-LD 远距离激光测振仪采用先进的动态激光干涉技术 和光电图像处理技术,以非接触式测量方式,对各种物体的变形 及振动、速度及位移等进行测量。它由激光测振系统、振动控制 器和图象处理器等组成。可与望远镜系统相匹配,实现大型物体 的远距离测试。
激光测振仪公式

激光测振仪公式
激光测振仪是一种利用激光技术进行振动测量的仪器。
它通常利用激光的干涉原理,通过测量目标表面上的振动引起的光程差变化来确定振动的幅度和频率。
激光测振仪的公式可以表示为:
$$\Delta z= \frac{2 \Delta L}{n}$$
其中:
- $\Delta z$是目标表面上的位移变化量
- $\Delta L$是光程差的变化量
- $n$是介质的折射率
激光测振仪的原理是利用激光束与目标表面相交后,在目标表面上发生干涉现象。
当目标表面发生振动时,引起光束的入射点和出射点位置的微小变化,从而引起光程差的变化。
根据干涉的原理,我们可以通过测量光程差的变化来确定目标表面的振动状态。
激光测振仪通常包括激光发射器、光学系统、探测器和信号处理器等组成部分。
激光发射器发射出具有一定特性的激光束,经过光学系统聚焦到目标表面上。
当目标表面发生振动时,引起光程差的变化。
探测器接收到经过目标表面反射回来的激光束,通过信号处理器处理后输出振动的信息。
激光测振仪广泛应用于工程领域中对振动进行精确测量和分析
的需求,如机械振动、结构振动、声振动等。
它具有测量范围广、精度高、非接触式等优点,是一种重要的振动测量工具。
激光多普勒测速
激光多普勒测速1.引言激光多普勒测速技术是伴随着激光器的诞生而产生的一种新的测量技术,它是利用激光的多普勒效应来对流体或固体速度进行测量的一种技术,广泛应用于军事,航空,航天,机械,能源,冶金,水利,钢铁,计量,医学,环保等领域[1-2]。
激光多普勒测速仪是利用激光多普勒效应来测量流体或固体运动速度的一种仪器,通常由五个部分组成:激光器,入射光学单元,接收或收集光学单元,多普勒信号处理器和数据处理系统或数据处理器,主要优点在于非接触测量,线性特性,较高的空间分辨率和快速动态响应,采用近代光-电子学和微处理机技术的LDV系统,可以比较容易地实现二维,三维等流动的测量,并获得各种复杂流动结构的定量信息。
由于上述潜在的独特功能,激光多普勒技术吸引了大量的实验流体力学和其他学科的研究工作者去研究和解决这些问题,使激光测速技术得到飞速发展,成为流动测量实验的有力工具。
激光测速技术的发展大体上可分为三个阶段[1-3]。
第一个阶段是1964 – 1972 年,这是激光测速发展的初期。
在此期间,大多数的光学装置都比较简单,用各种元件拼搭而成,光学性能和效率不高,使用调准也不方便;第二个阶段是1973 – 1980 年,在此期间,激光测速在光学系统和信号处理器方面有了很大的发展。
光束扩展,空间滤波,偏振分离,频率分离,光学频移等近代光学技术相继应用到激光测速仪中。
从1980年到现在,激光测速进入了第三个阶段。
在此期间,应用研究得到快速发展。
在发表的论文中,有关流动研究的论文急剧增加。
多维系统,光纤传输技术以及数字信号处理和微机数据处理技术等的出现把激光多普勒技术推向更高水平,使用调整更加方便。
此外,半导体激光器的应用是其小型化成为可能,推动激光多普勒测速走出实验室,迈向工业和现场应用。
激光的多普勒效应是激光多普勒测速技术的重要理论基础,当光源和运动物体发生相对运动时,从运动物体散射回来的光会产生多普勒频移,这个频移量的大小与运动物体的速度,入射光和速度方向的夹角都有关系[1]。
激光多普勒测速技术的应用
激光多普勒显微镜光路图
用于血液流速测量的光纤 激光多普勒测速仪原理图
2
激光多普勒血流仪
激光多普勒可以监测整个微循环系统的血液灌注量,包括毛细血管(营养血流)、 微动脉、微静脉和吻合支。该技术基于发射激光通过光纤传输,激光束被所研究 组织散射后有部分光被吸收。击中血细胞的激光波长发生了改变(即多普勒频 移),而击中静止组织的激光波长没有改变。这些波长改变的强度和频率分布与 监测体积内的血细胞数量和移动速度直接相关。通过接收光纤,这些信息被记录 并且转换为电信号进行分析。
激光多普勒测速技术的应用
多普勒测速是通过检测流体中运动微粒散射光的多普勒频移来测定速度的。 激光多普勒测速有其突出的优点: 1)属于非接触测量,激光会聚点作为测量探头不干扰流场,也可很方便地 在恶劣环境中如火焰、腐蚀性流体内进行测量; 2)不需要流动校正; 3)不取决于温度、密度和流体成分等其他物理参数,仅对流速敏感; 4)取出量与速度成线性关系; 5)测量速度方向的灵敏性好; 6)动态响应快,测速范围广等。 但也有其局限性,例如: 1)需要示踪粒子,示踪粒子要与流体一起运动; 2)价格较贵; 3)被测流体要有一定的透明度,管道要有透明窗口。 激光多普勒测速应用很广:可用于燃烧混合物、火焰、旋转机械、窄通 道、化学反应流动、风洞或循环水洞中流动速度的测量等。
6
该仪器由AT3010和AT3100组成, AT3010是将激光束照在振动物体 上,然后将反射光会聚,进行O/E 转换的装置,AT3100是速度解调 装置。
超音速风洞中激光测速
激光风速计在风洞中的使用不如在测量液流中那样普遍,其一是风洞不易建造, 其二是空气中尘埃下沉,很少甚至不可能产生自然的散射中心,而在液体中由 于存在着细小的尘埃,总是很自然地形成散射中心。因此在风洞中必须掺入少 量烟尘等微粒,这就使得这种系统变得复杂。美国阿诺德工程发展中心应用激 光多普勒测速技术对一英尺超音速风洞中激波附面层,机翼外挂物等多种系统 进行了测量,获得了很好的结果。
激光多普勒测振技术及方案
1.1 多普勒频移概念
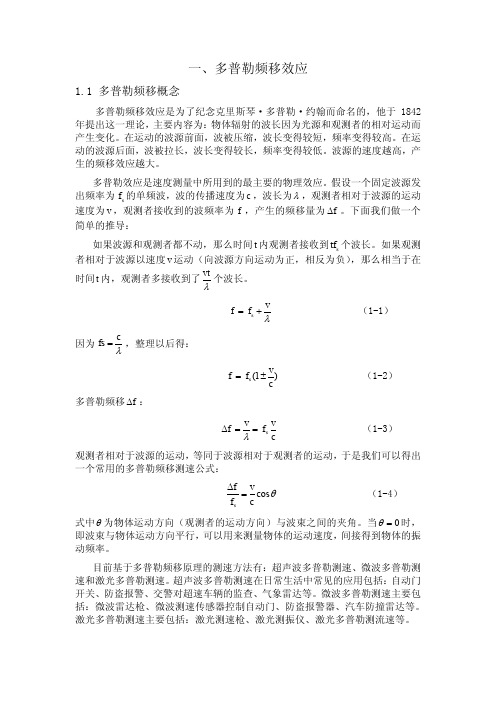
多普勒频移效应是为了纪念克里斯琴·多普勒·约翰而命名的,他于 1842 年提出这一理论, 主要内容为: 物体辐射的波长因为光源和观测者的相对运动而 产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高。在运 动的波源后面,波被拉长,波长变得较长,频率变得较低。波源的速度越高,产 生的频移效应越大。 多普勒效应是速度测量中所用到的最主要的物理效应。假设一个固定波源发 出频率为 f s 的单频波,波的传播速度为 c ,波长为 ,观测者相对于波源的运动 速度为 v ,观测者接收到的波频率为 f ,产生的频移量为 f 。下面我们做一个 简单的推导: 如果波源和观测者都不动,那么时间 t 内观测者接收到 tf s 个波长。如果观测 者相对于波源以速度 v 运动(向波源方向运动为正,相反为负) ,那么相当于在 vt 时间 t 内,观测者多接收到了 个波长。
一个参数,就可以得到物体的振动频率。因此,可以利用激光多普勒技术测量叶 片的瞬时振动位移、速度来得到叶片的振动频率。
方案一:激光干涉法测量叶片振动位移
1. 光路如下图:
角锥反射镜
PBS 激光器 角锥反射镜
信号处理
光敏二极管
图 2.1 激光干涉法测位移光路一
图 2.2 激光干涉法测位移光路二
2.测量原理 (1)光的干涉:干涉现象是光的波动性独有的特性,两列或几列光波在空 间相遇时相互叠加,在某些区域始终加强,在另一些区域始终削弱,形成稳定的 强弱分布的现象,称之为光的干涉现象。明与暗的间隔为半个波长,即 。 2 干涉产生的条件: 只有两列光波的频率相同, 相位差恒定, 振动方向一致 (光 具有偏振现象)的相干光源,才能产生光的干涉。 (2)利用光的干涉测量位移的原理:如图 2.1 和 2.2,如果被测物体位置改 变时,反射光路的长度发生变化,干涉时相位会发生改变,反映在干涉条纹上的 现象是, 明暗交替的干涉条纹会沿着一个方向运动。通过光探测器来检测通过某 个点的光强变化,可以“数”出条纹的移动距离,来推算出物体的移动距离。 如图 2.1,一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。 另一个角锥反射镜相对于分光镜移动,形成变化长度测量光线。从激光头射出的 激光光束具有稳定的单一频率, 当此光束到达偏振分光镜时,被分成两束光—— 反射光束和透射光束。 两束光被传送到各自的角锥反射镜中,然后反射回分光镜 中,在探测器中形成干涉光束。如果两光光程差不变化,探测器将在相长干涉和 相消干涉的两端之间的某个位置观察到一个稳定的信号(即干涉条纹不动) 。如 果两光程差发生变化, 每次光路变化时探测器都能观察到相长干涉和相消干涉两 端之间的信号变化,这些条纹被数出来,用于计算光程差的变化,测量的长度等 于条纹数乘以激光波长的一半,即 s n 。 2 图 2.2 的光路,与图 2.1 类似,因为接收器的位置与激光器相差 90 度,因 此角锥反射镜可被反射镜代替,但系统占用空间较大。 3.系统组成 激光器、 半透半反镀银分光镜 PBS、 反射镜 (或角锥反射镜) 、 光敏二极管 (或 光电倍增管) 、示波器(或信号处理与采集系统) 4.系统适用范围 低频大振幅或高频小振幅的振动情况。由于多普勒频移的存在,使得测量结 果受到一定影响,如果振动速度不大,对于测量平均位移来说仍有较高的精度。
激光多普勒测速

31
如图5-3所示,两束平行的、相干细光 束在透镜后焦点形成相交区,该相交 区称为控制体。
在控制体中存在着明暗相间的干涉条 纹,由几何关系可得条纹间距df为:
d f
2 sin 2
(5-9)
32
首先考虑两个同频率、同振动方向、初相位为零 的单色光波的叠加
测器方向的单位向量。
25
• (5-1)代入(5-2),忽略高次项,得到
:
fS
f0
(1
e0
c
)
1
veS c
f0 1
v(eS e0 ) c
(5-3)
光检测器接收的光波频率与入射光波 频率之差叫多普勒频差或频移。
26
f多D 普勒fS频移f用0 fD表f0示v(:eSc e0 )
18
声学中的多普勒现象
当你站在火车站台上鸣笛的火车进站时, 你感到笛声变得尖了,即笛声频率变高; 相反,火车鸣笛离开站台,你会感到笛 声变得低沉,即笛声频率变低。 这种因波源和观察者相对于传播介质的 运动而使观察者接收到的波源频率发生 变化的现象叫多普勒效应。
19
如果运动发生在波源和观察者的连线上,假设 波源相对于 介质的运动速度为u,波源的波长为,观察者相对介质的运 动速度为v,波源原来的频率为f0,波源在介质中的传播速 度V,对下述四种情况可分别求得观察者接收到的频率f。
9
2. 全息干涉测速法
在被测流体中掺粒子示踪剂,通常用 双脉冲激光作光源,通过双曝光拍摄 相隔t的两幅粒子图于同一块干版上。 利用再现粒子场的实像图,求出粒子 对间的位移大小和方向,再由 v=s/t求出速度场。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术特点
采用先进的外差干涉技术 通过非接触式测量,对各种物体的 振动、速度及位移等进行测量 高空间分辨率 精巧的内部设计,坚实的外部防撞 设计,以及多种可以适用不同工业 领域的要求的光传感器 可以通过CCD镜头实时的观察检测 范围
多种配套振动分析软件
完整测量解决方案
性能参数
21
SIS研发生产的NanoVision 激光多普勒测振仪,采用了外 差式激光干涉原理,可以对各种物体的振动、速度及位移 等进行非接触测量。其LV-S01型激光多普勒测振仪,如图 二所示,具有测量精度高,抗干扰能力强,结构设计坚固 紧凑、易于使用等特点。
测量原理
激光多普勒测振仪是基于光学干涉原理, 也就是光强分别是I1和I2的两个相干光束相 互重叠。其总光强不是简单的单独光强的 相加而是根据以下称之为干涉条件的公式 得出的 Itot = I1 + I2 + 2√(I1I2)cos[2π(r1– r2)/λ ] 由于多普勒频移f=2v/λ ,即f与速度(v)成正 比变化。传感器获得的信号再经过频率电 压转化为电压信号U,由于该转化为线性, 即: U=k(F+f)+L=k*f+L' 其中L,L‘为常数,电压通过高通滤波去处 直流分量得: U=k*f=2kv/ λ ,则v=k'*U, 电压与振动速度成正比。
PART
CAD
多传感器综合测量 Optical
MEMS system Lenses on CNC system x
y
Surface roughness of solar cell or microchip
融合包括距离测量和面型测量的多种传感 器,发展成为多传感器综合测量系统是另 一个发展方向。
LV-S01激光多普勒测振仪
Sample: Hard disk cover Step height approx 1.6mm
Z-height Data 1.5839 1.5849 1.5844 1.5865 1.5839 1.5835 1.5870 1.5844 1.5849 1.5844
1.58800 1.58700 1.58600 1.58500 1.58400 1.58300 1.58200 1.58100 1 2
Soft DSA振动测量分析软件
实时数据显示、分析与触发控
制
先进时域与频域波形分析 多种信号滤波和峰值锁定功能 输出转换为各种对应的物理量 简便易用,各种主要信息均显 示在同一页面上
接触式坐标测量仪 非接触式坐标测量仪 混合式坐标测量仪
视频+探针 视频+激光
视频+光纤
根据聚焦模式分类 手动聚焦 自动聚焦
根据取点模式分类 手动取点 自动取点
固定桥式结构
桥式
固定桥式
悬臂式
水平臂式
台式
立式
固定桥式特点
系统的稳定性和可靠性高 最大限度地减少了阿贝误差的影响 测量空间大而占地空间小,安全性高、测量精 度受被测工件重量和摆放位置影响小 采用了铸铝结构,大大减少了机器的重量。
CAD叠加(增强现实技术)
增强现实技术结合了虚拟现实技术和现实影像,通过导入被 测工件的CAD设计图并与实际被测工件配准,可以把CAD设 计图精确叠加在被测工件的实际影像上,使得测量人员可以 通过观察二者的匹配情况快速发现误差或异常情况。
影像测量机应用领域
应用举例:太阳能面板
测量和检测太阳能面板的长度、宽 度和高度,表面裂纹是近年来的新兴 需求。太阳能面板将吸收到的光能转 化为热能,吸收面积的大小直接影响 了热能的大小。MeasurE软件增加 了面积测量功能,可以精确的测量太 阳能面板受光面积,便于计算能量转 换效率。
尺寸、形位测量仪器
光学投影仪
测量显微镜
影像测量机
振动、位移测量仪器
激光多普勒测振仪 三角法和共焦微位移计 激光测长尺
激光多普勒测振仪 激光三角法微位移计
MV-322 三维全自动影像测量机
根据工作台驱动模式分类 手动坐标测量仪 自动坐标测量仪
产品分类
根据传感器模式分类
测量软件
自动边缘检测 19种几何测量功能 自动批量测量
自动聚焦
自动光源控制 CAD 叠加(增强系结构上充分考虑了现代 光学测量仪器多传感器融合的特点,做到了从最底层对各种传 感器的兼容。其兼容了接触式测头的混合式测量机,做到了影 像测量和接触测量功能的高度统一。事实上,除了取点方式不 同,其它计算功能是完全通用的。
光学精密测量技术与仪器
光学精密测量仪器综述
光学精密测量仪器综合了光学、机械、电子、自动控 制和软件多种专业,其技术内涵宽广,产品种类繁多, 应用领域广泛,是制造工业的支撑基础之一。光学精 密测量仪器具有快速、精确及非接触无损伤地测量多 种物理量的特点,近年获得了极大的发展和越来越广 泛的应用。 • 今天以舜宇仪器新加坡公司(SIS)研发生产的三维 全自动影像测量机和激光多普勒测振仪为例,介绍 一下现代光学精密测量技术与仪器的技术特点、应 用案例和发展趋势。
3.5u m
3
4
5
6
7
8
9
10
发展趋势:在线测量
随着人工成本的上升,生产的自动化,也包括检测的自动 化,成为必然。生产自动化正越来越多的依赖由高精度加 工系统和高精度测量仪器组合的集成加工系统来完成影像 测量机融合到生产自动化过程中,向在线测量系统发展成 为必然的趋势。
测量与检测相融合
目前在线所用的 光学系统,是以统 称为机器视觉的检 测技术为主流。这 类光学检测系统一 般是非通用的,以 检查缺陷为主,几 何量测量为辅。影 像测量机若要发展 为在线测量系统, 也必然需要融入一 些检查功能。
Heigh
Surface Area LINE WIDTH
应用举例:塑胶模具
塑胶材质柔软,一旦接 触很有可能改变其形状, 三维影像测量机进行非 接触测量即可避免这类 问题。
SIZE HAIRLI NE CRACK
应用举例:台阶高度测量
Standard Deviation Max Min Range Average 0.001132 1.5870 1.5835 0.0035 1.5847