安川机器人破解说明
安川焊接机器人说明书

在机器人运行过程中,保持警 惕,注意观察设备运行状态, 及时发现并处理问题。
应急处理预案制定
制定机器人故障应急 处理预案,明确故障 类型、处理措施和责 任人。
定期检查应急处理预 案的可行性和有效性 ,及时更新和完善预 案内容。
对操作人员进行应急 处理培训,提高他们 应对突发情况的能力 。
感谢您的观看
05
设备维护与保养
日常维护项目清单
清洁机器人表面
使用干布擦拭机器人表面,确 保无灰尘、油污等杂质。
检查电缆和连接器
检查所有电缆和连接器是否松 动或损坏,确保连接可靠。
检查焊接设备
检查焊枪、导电嘴等易损件, 如有磨损或损坏应及时更换。
润滑关节和轴承
按照使用说明书要求,定期为 机器人的关节和轴承添加润滑
伺服电机
驱动机器人各关节运动 ,实现精确的位置和速
度控制。
减速器
降低电机输出速度,增 加输出扭矩,提高机器
人动作精度。
控制器
接收外部指令,解析并 控制伺服电机运动,实
现机器人动作。
传感器
监测机器人状态和环境 信息,为控制器提供反
馈信号。
辅助设备及配件
01
02
03
04
示教器
用于手动操作机器人,进行示 教编程和调试。
06
安全注意事项及操作规范
安全防护措施建议
在机器人工作区域设置安全围 栏,确保人员不会误入危险区
域。
在机器人上安装急停按钮, 以便在紧急情况下迅速切断
电源。
定期对机器人进行安全检查和 维护,确保设备处于良好状态
。
操作规范要点提示
在操作机器人前,务必熟悉设 备的各项功能和操作流程。
安川机器人NX100使用说明书

? 本说明书对 NX100的示教、再现、程序及文件编辑操作、作业管理等内容进行了全面的说 明。请务必在认真阅读并充分理解的基础上操作机器人。 ? 另外,有关安全的一般事项,在 《 NX100使用说明书》的 本说明书前请务必熟读,以确保正确使用。 “ 1 安全”中有详细描述,阅读
。
? 进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作: - NX100接通电源时。 - 用示教编程器操作机器人时。 - 试运行时。 - 自动再现时。 不慎进入机器人动作范围内或与机器人发生接触,都有可能引发人身伤害事故。另外,发 生异常时,请立即按下急停键。 急停键位于 NX100 前门及示教编程器的右侧。
9539111arm控制9539112arm控制设定画面9579113设定工具重量信息965912碰撞检测功能9679121碰撞检测功能9679122设定碰撞检测功能977xii913命令显示等级的设定9789131显示项目9799132命令集的设定操作980914数值键的用户化功能9819141关于数值键的用户化功能9819142定义功能981单独键定义9829143键定义的操作方法99291449939145定义的执行命令输出控制定义的执行995915输出状态的修改996916暂时解除软极限功能998917参数的变更
iv
? 进行机器人示教作业前要检查以下事项,有异常则应及时修理或采取其他必要措施。 - 机器人动作有无异常。 - 外部电线遮盖物及外包装有无破损。 ? 示教编程器用完后须放回原处。 如不慎将示教编程器放在机器人、夹具或地上,当机器人运动时,示教编程器可能与机器 人或夹具发生碰撞,从而引发人身伤害或设备损坏事故。 ? 在理解 NX100使用说明书的 “警告标志”的基础上,使用机器人。
2024版安川机器人报错代码DX100使用说明书
03
DX100报错代码识别与诊断
2024/1/26
10
识别报错代码
2024/1/26
查看机器人控制器显示屏
当安川机器人出现故障时,控制器显示屏上会显示相应的报错代码, 如DX100。
查阅报错代码手册
安川机器人配备了详细的报错代码手册,通过手册可以快速找到对 应报错代码的含义和解决方法。
11
诊断报错代码
2024/1/26
定期检查电缆、接头等连接部 分,确保连接良好。
定期更换磨损严重的零部件, 以保证设备正常运行。
21
操作规范和使用建议
2024/1/26
01
在操作前仔细阅读使用说明书,了解设备的各项功 能和操作要求。
02
严格按照规定的操作步骤进行操作,避免随意更改 设置或参数。
03
在使用过程中注意观察设备运行状态,发现异常及 时停机检查。
推动机器人行业的创新与发展
随着机器人技术的不断创新和发展,将推动机器人行业的整体进步,为制造业等各个领域带来更多的便利 和价值。
2024/1/26
27
THANK YOU
感谢聆听
2024/1/26
28
设备故障
机器人硬件部件损坏、老化或连接不良可能导致 报错代码的产生。
通讯故障
机器人系统与其他设备或系统之间的通讯线路故 障、通讯协议不匹配或通讯干扰可能导致报错代 码的出现。
2024/1/26
软件问题
机器人软件存在缺陷、程序编写错误或软件版本 不兼容可能引发报错代码。
配置错误
错误的系统配置参数、缺失的配置文件或配置不 当可能导致机器人系统无法正常运行并产生报错 代码。
尝试将机器人的配置重置为默认设置,以解决可能的 配置错误。
安川机器人操作及简单故障处理

安川机器人操作及简单故障处理集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-安川机器人操作及简单故障处理一.机器人简介1、硬件构成:我公司二期所用的日本安川公司机器人共有15台,全部为MOTOMAN系列产品,共有SK120,SK6,SV3及UP6四种型号。
四种型号的机器人都是由机器人本体,控制柜两部分构成。
机器人本体上装有伺服马达,传动机构及减速机构等机械装置。
这几种型号的机器人都是有六个轴关节,由六台伺服马达和六套传动机构组成。
六个轴的名称分别为S、L、U、R、B、T轴,其中S轴控制整个本体的来回旋转、L轴控制机器人下臂的前后摆动、U轴控制机器人上臂上下摆动、R轴控制上臂的来回旋转、B轴控制机器人手腕的上下摆动、T轴控制手腕的来回旋转。
六个马达共同运动可以使机器人运行到其工作范围内的任意的一个空间位置。
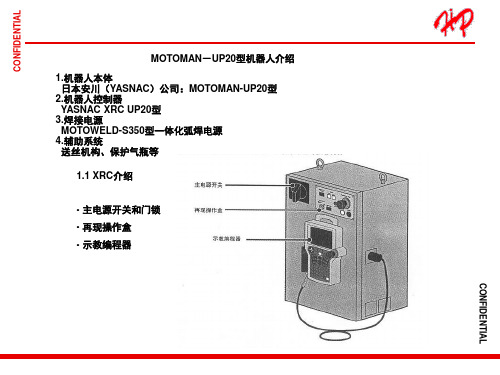
控制柜内装有全部控制装置、再现操作盒及示教盘。
控制装置包括主计算机(CPU单元),伺服马达驱动器,各种外部信号输入输出板,电源装置等。
此系列机器人电源的额定输入为AC220V50/60HZ三相电源,在国内使用时必须配备电源变压器。
再现操作盒上装有各种操作按纽、指示灯及通讯口等装置。
示教盘上有液晶显示器和各种操作按纽,主要用于编写程序、操作机器人及观察其工作状况等。
2、机器人工作方式:机器人的工作方式为示教再现型,即由操作者操作机器人完成一遍所有的预定动作,机器人记录下所走过各个位置点的坐标随后自动运行中按照示教的位置、速度完成所有动作。
机器人运动时的坐标系统有五个分别为:关节坐标系、直角坐标系、圆柱坐标系、工具坐标系和用户坐标系。
机器人在关节坐标系中运动方式为各轴单独运动互不影响;在直角坐标系中机器人以本体轴的X、Y、Z三个方向平行移动;在圆柱坐标系中机器人以本体轴Z轴为中心回旋、直角或平行移动;在工具坐标系中机器人以工具尖端点的X、Y、Z轴平行移动;在用户坐标系中由用户在机器人工作的范围之内任意设定不同角度的X、Y、Z 轴,机器人可延所设的各轴平行移动。
安川机器人操作及编程简易教程课件

注意:接通电源时,请务必按照先开主电源再开伺服电 源的顺序。接通电源前,必须充分确认机器人周围是否 安全。
2.1 接通主电源 把XRC正面主电源开关旋至“ON”位,接通主电源, XRC内部进行初始化诊断后,在示教编程器上显示初始 画面。
2.2 接通伺服电源 把XRC正面主电源开关旋至“ON”位,接通主电源, XRC内部进行初始化诊断后,在示教编程器上显示初始 画面。
例如:
MOVJ VJ=50.00
MOVL V=66
2. 程序点 一般把某个运动命令到下一个运动命令前称为一个
程序点。每个程序点前都有001、002、003这样的程序 点。 例如,“程序点1的位置”指程序点号为001(S:001) 的运动命令中记录的位置。 示例:
安川机器人操作及编程简易教程
3.2 示教
安川机器人操作及编程简易教程
3.2.1 示教前的准备 开始示教前,请做以下准备: • 使再现操作盒能有效操作
再现操作盒上的按 键
• 把动作模式定为示教模式
• 示教锁定 • 输入程序名
示教盒上的按键
1.确认再现操作盒的[REMOTE]键的灯是熄灭状态,以 保证再现操作盒的操作有效。
2Байду номын сангаас按再现操作盒的[TEACH]键,定为示教模式。
1. 连续按下[前进]键,把机器人移至要删除的程序点6。
2. 确认光标位于要删除的程序点处,按下[删除]键。 3. 按下[回车]键,完成程序点的删除。所删除的程序点之后的各程序点号码 自动减1。
安川机器人操作及编程简易教程
4.1 再现前的准备
按下[示教锁定键]解除示教锁定,确认[示教锁定]键上的灯处于熄灭状态。
安川机器人操作及编程简易教程
示教结束
Hi-P International Limited © 2011 16
CONFIDENTIAL
最初的程序点和最后的程序点重合 现在机器人停在第1程序点附近的第6程序点处。这时,如果能从作业结束位置的程序点5直接移动到 程序点1的位置,即可进行下面的作业,从而提高工作效率。因此,作如下修改:把最终位置的程序 点6与最初位置的程序点1设为同一位置。
5. 按[回车]键,输入程序点1(行0001)。
CONFIDENTIAL
Hi-P International Limited © 2011
11
CONFIDENTIAL
程序点2——作业开始位置附近 在该点处调整机器人姿态至合适的作业姿态。 1. 用轴操作键,设定机器人姿态为合适的作业姿态。
2.按[回车]键,输入程序点2(行0002)。
4.2 再现
1. 2. 3. 确认机器人附近没有人再开始操作。 按下再现操作盒上的[PLAY]键,设定为再现模式。 按下再现操作盒上的[START]键,机器人把示教过的程序再现运行一 次后停止。
注意:为了从程序头开始运行,务必进行以下操作:
• 把光标移到程序开头。 • 用轴操作键先把机器人移到程序点1。再现时,机器人从程序点1开始动作。
程序点位置的修改: 1. 把光标移到程序1所在行。 2. 按下[前进]键,机器人移到程序点1的位置。 3. 把光标移到程序6所在行。
CONFIDENTIAL
4. 按下[修改]键。 5. 按下[回车]键,程序点6的位置被修改到与程序点1相 同的位置。
Hi-P International Limited © 2011 17
12
CONFIDENTIAL
2.按[坐标]键,设定机器人坐标系为直角坐标系,用轴操 作键把机器人移到作业开始位置。
安川机器人操作及简单故障处理
安川机器人操作及简单故障处理一.机器人简介1、硬件构成:我公司二期所用的日本安川公司机器人共有15 台,全部为MOTOMAN系列产品,共有SK120,SK6,SV3及UP6四种型号。
四种型号的机器人都是由机器人本体,控制柜两部分构成。
机器人本体上装有伺服马达,传动机构及减速机构等机械装置。
这几种型号的机器人都是有六个轴关节,由六台伺服马达和六套传动机构组成。
六个轴的名称分别为S、L、U、R、B、T轴,其中S轴控制整个本体的来回旋转、L轴控制机器人下臂的前后摆动、U轴控制机器人上臂上下摆动、R轴控制上臂的来回旋转、B轴控制机器人手腕的上下摆动、T轴控制手腕的来回旋转。
六个马达共同运动可以使机器人运行到其工作范围内的任意的一个空间位置。
控制柜内装有全部控制装置、再现操作盒及示教盘。
控制装置包括主计算机(CPU单元),伺服马达驱动器,各种外部信号输入输出板,电源装置等。
此系列机器人电源的额定输入为AC220V 50/60HZ三相电源,在国内使用时必须配备电源变压器。
再现操作盒上装有各种操作按纽、指示灯及通讯口等装置。
示教盘上有液晶显示器和各种操作按纽,主要用于编写程序、操作机器人及观察其工作状况等。
2、机器人工作方式:机器人的工作方式为示教再现型,即由操作者操作机器人完成一遍所有的预定动作,机器人记录下所走过各个位置点的坐标随后自动运行中按照示教的位置、速度完成所有动作。
机器人运动时的坐标系统有五个分别为:关节坐标系、直角坐标系、圆柱坐标系、工具坐标系和用户坐标系。
机器人在关节坐标系中运动方式为各轴单独运动互不影响;在直角坐标系中机器人以本体轴的X、Y、Z三个方向平行移动;在圆柱坐标系中机器人以本体轴Z轴为中心回旋、直角或平行移动;在工具坐标系中机器人以工具尖端点的X、Y、Z 轴平行移动;在用户坐标系中由用户在机器人工作的范围之内任意设定不同角度的X、Y、Z轴,机器人可延所设的各轴平行移动。
二.机器人的操作和程序的编写1、再现操作盒操作键说明:见P2-32、示教盘操作键说明:见P2-63、程序结构说明:机器人的程序语言为安川公司自己开发的专用语言(INFORM II),其指令主要分为移动指令、输入输出指令、控制指令和平移指令、运算指令等。
安川机器人操作及编程简易教程

安川机器人操作及编程简易教程目录一、概述 (3)1. 安川机器人简介 (3)2. 教程目的与适用范围 (4)3. 教程所需软件与硬件要求 (5)二、机器人基本操作 (6)1. 机器人开机与关机操作 (7)1.1 开机步骤 (7)1.2 关机步骤 (7)2. 机器人手动操作模式 (8)2.1 机器人手动控制介绍 (9)2.2 手动操作界面介绍 (11)2.3 手动操作注意事项 (11)3. 机器人自动操作模式 (12)3.1 自动操作模式介绍 (14)3.2 自动操作程序设置步骤 (15)3.3 自动操作注意事项 (15)三、机器人编程基础 (16)1. 编程基础概念 (18)1.1 编程术语解析 (19)1.2 编程语言简介 (20)1.3 机器人编程流程 (21)2. 安川机器人编程语言介绍 (23)2.1 语言特点 (25)2.2 语法规则 (26)2.3 编程实例解析 (27)3. 机器人程序调试与运行 (28)3.1 程序调试步骤 (29)3.2 程序运行监控 (30)3.3 错误处理与故障排除 (31)四、机器人高级编程技术 (32)1. 高级编程技术概述 (33)2. 复杂程序编写实例解析 (34)2.1 多任务程序编写 (35)2.2 路径规划程序编写 (36)2.3 协同作业程序编写 (37)3. 高级编程技巧与注意事项 (38)3.1 编程优化技巧 (39)3.2 代码可维护性考虑 (40)3.3 安全防范措施讲解 (41)五、机器人维护与保养 (42)1. 机器人日常检查项目与步骤 (43)2. 机器人定期保养流程 (44)3. 机器人故障排除与处理方法 (45)4. 机器人维护与保养注意事项 (46)六、案例分析与实践操作指导 (47)一、概述随着科技的快速发展,人工智能和机器人技术已经成为当今世界的热门话题。
在制造业、医疗、服务业等领域,机器人已经得到了广泛的应用。
安川机器人作为一家知名的机器人制造商,为各种应用领域提供了高效、精准的机器人解决方案。