正交子空间
标准正交基所张成的r4子空间上的正交投影的矩阵
标准正交基所张成的r4子空间上的正交投影的矩阵
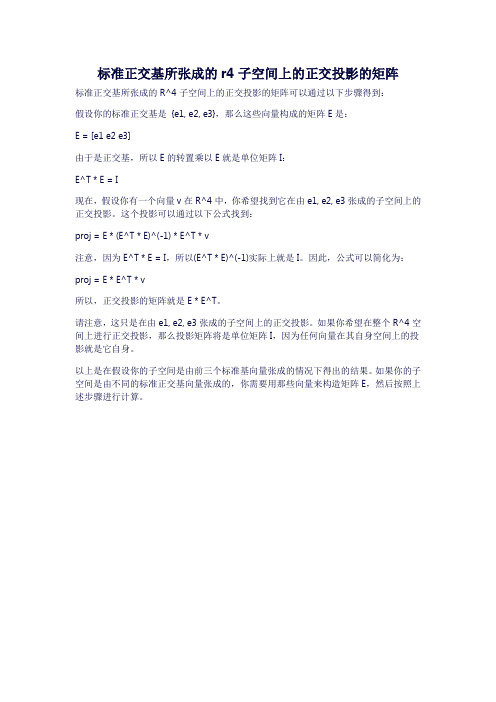
标准正交基所张成的R^4子空间上的正交投影的矩阵可以通过以下步骤得到:
假设你的标准正交基是{e1, e2, e3},那么这些向量构成的矩阵E是:
E = [e1 e2 e3]
由于是正交基,所以E的转置乘以E就是单位矩阵I:
E^T * E = I
现在,假设你有一个向量v在R^4中,你希望找到它在由e1, e2, e3张成的子空间上的正交投影。
这个投影可以通过以下公式找到:
proj = E * (E^T * E)^(-1) * E^T * v
注意,因为E^T * E = I,所以(E^T * E)^(-1)实际上就是I。
因此,公式可以简化为:
proj = E * E^T * v
所以,正交投影的矩阵就是E * E^T。
请注意,这只是在由e1, e2, e3张成的子空间上的正交投影。
如果你希望在整个R^4空间上进行正交投影,那么投影矩阵将是单位矩阵I,因为任何向量在其自身空间上的投影就是它自身。
以上是在假设你的子空间是由前三个标准基向量张成的情况下得出的结果。
如果你的子空间是由不同的标准正交基向量张成的,你需要用那些向量来构造矩阵E,然后按照上述步骤进行计算。
欧氏空间正交分解的一个应用

欧氏空间正交分解的一个应用欧氏空间正交分解是将一个欧氏空间拆分为两个正交子空间的过程。
这种分解方法在数学、物理和工程等领域有广泛的应用。
下面将以图像处理为例,介绍欧氏空间正交分解的一个应用。
图像处理中,常常需要对图像进行降噪处理。
噪声会影响图像的质量和清晰度,因此在很多应用场景中,如医学图像分析、数字媒体和计算机视觉等领域,降噪是一个重要的任务。
欧氏空间正交分解可以被用来降噪图像。
具体的步骤如下:1. 将图像表示为一个欧氏空间中的一个向量。
图像可以被看作是一个矩阵,所以可以将矩阵展平为一个向量。
2. 使用一组正交基对图像向量进行正交分解。
正交基是一个向量组,其中每个向量与其他向量互相垂直。
这个向量组的个数通常与图像的维度相等。
3. 利用正交基将图像向量分解为两个正交子空间的向量之和。
这两个子空间分别代表了图像向量中与噪声相关的部分和与噪声不相关的部分。
4. 在不相关子空间中的分量是与噪声无关的,可以将其保留下来。
5. 噪声相关的部分可以被认为是噪声矢量的线性组合。
通过去除噪声相关的部分,将图像恢复为去噪后的版本。
这种欧氏空间正交分解的方法可以显著降低图像中的噪声,并改善图像的质量。
通过保留与噪声无关的部分,图像的细节可以得到更好的保留。
总结:欧氏空间正交分解在图像处理中被广泛应用于降噪处理。
通过将图像表示为欧氏空间中的向量,并使用正交基进行分解,可以将图像中与噪声相关的部分与与噪声无关的部分分离开来。
保留与噪声无关的部分,可以显著降低图像中的噪声,并提高图像的质量。
这种方法在医学图像、数字媒体和计算机视觉等领域有着广泛的应用前景。
2-3[1].正交子空间
![2-3[1].正交子空间](https://img.taocdn.com/s3/m/4171eea20029bd64783e2ca6.png)
V 的一个
T ( x) = x
, x ∈ V
的标准正交基底变成标准正交基底; (3)将 V 的标准正交基底变成标准正交基底; ) 正交) (4)酉(正交)变换在标准正交基下的矩阵表示为 ) 酉(正交)矩阵。 正交)矩阵。 推论: 推论:设 A为 阶酉(正交)矩阵, n阶酉(正交)矩阵,则
上的酉(正交) T : T ( x ) = Ax , x ∈ C n ( R n ) 为 C n ( R n ) 上的酉(正交)变换
B H A = 0 b H a i = (a i , b j ) = 0 i = 1, 2,L , m; j = 1, 2,L , s j
x ∈ R ( A ), y ∈ R ( B ) 令:
x = k1a1 + k 2 a 2 + L + k m a m
k1 , k 2 ,L , k m ∈ C
α ∈ V1 , β ∈ V2 , 恒有 (α , β ) = 0
则称子空间 V1 与 V2 为正交的,记作 V1 ⊥ V2 . 正交的,
Department of Mathematics
说明: 说明: 正交. ① V1 ⊥ V2当且仅当 V1中每个向量都与 V2正交. ② V1 ⊥ V2 V1 I V2 = {0}.
(
Q α ∈ V1 I V2 (α ,α ) = 0 α = 0.
)
③ 当 α ⊥ V1 且 α ∈ V1 时,必有 α = 0. ④ 若 V1 ⊥ V2 ,则: dim(V1 + V2 ) = dimV1 + dimV2 则
Department of Mathematics
2,定理 定理: 定理 (1),设酉 欧氏 空间 V = L [α1 , α 2 ,L, α n ] , α 1 , α 2 ,L , α n 设酉(欧氏 设酉 欧氏)空间 为标准正交基,则 为标准正交基 则:
矩阵的子空间的正交基
矩阵的子空间的正交基
矩阵的子空间的正交基是子空间的正交分解中的一组基。
对于任意一组线性无关的向量,它们可以构成一个子空间。
而在这个子空间中,可以找到一组正交基,即这组基的各个向量之间的内积为0,而且它们的范数都为1。
正交基的构造可以通过Gram-Schmidt正交化过程来实现。
具体来说,对于任意一组线性无关的向量,可以先将其中一个向量作为正交基的第一个向量,然后将其余的向量依次与这个向量进行正交化操作,得到一组新的正交基向量。
如果需要将一个矩阵分解为一个子空间的正交基和余子空间的正交基的和,可以通过对矩阵进行奇异值分解(SVD)来实现。
具体来说,对于一个m×n的矩阵A,可以将其分解为UΣV*的形式,其中U和V 是两个正交矩阵,Σ是一个对角矩阵,其中的元素称为A的奇异值。
然后,可以将U和V分别看作两个子空间的正交基,而Σ中除了对角线上的元素外,其余元素可以看作余子空间的基向量。
高等代数子空间
. .. . . ..
子空间正交的概念
注
V1 ⊥ V2 ⇔ V1 中任意向量与 V2 的任意向量正交 ⇔ V1 中任意向量与 V2 正交 ⇔ V2 中任意向量与 V1 正交.
α ⊥ β ⇔ α ⊥ L(β). α ⊥ βi, i = 1, 2, · · · , s ⇔ α ⊥ L(β1, β2, · · · , βs). 几何空间中,直线与直线,直线与平面的正交是子空间的正 交. 平面与平面的正交不是子空间的正交不是子空间的正交, 交线上的向量不正交. V1 ⊥ V2 ⇒ V2 ⊥ V1.
. . . .... .... .... . .
. .. . . ..
正交补子空间
V1 的正交补记为 V⊥1 . 由定义可知 dim V1 + dim V⊥1 = n.
. . . .... .... .... . . . . .... .... .... . .
. .. . . ..
正交补子空间
子空间正交的概念
我们来讨论欧氏子空间中子空间的正交关系
定义 设 V1, V2 是欧氏空间 V 中两个子空间. 如果对于任意的 α ∈ V1, β ∈ V2,恒有
(α, β) = 0.
则称 V1, V2 为正交的,记为 V1 ⊥ V2. 一个向量 α,如果对于任 意的 β ∈ V1,恒有
(α, β) = 0.
显然,子空间 L(εm+1, · · · , εn) 就是 V1 的正.交. 补. . .. . . . . . . . . . . . . . . .
. . . .... .... .... . .
. ..
正交补子空间
再来证唯一性. 设 V2, V3 都是 V1 的正交补,于是 V = V1 ⊕ V2, V = V1 ⊕ V3.
在这里讨论欧氏空间中子空间的正交关系概要
( ) W , 正交补W 也是的不变子空间 .
Ex 5 设U, W是欧氏空间 V的两个子空间 . 证明 : (U W ) U W (U W ) U W
• 思考题
设V1,V2是有限维欧氏空间V的两个子空间 R(V1)=s,R(V2)=r.存在α ∈V2 α ≠0,使得 α ⊥V1充分必要条件是子空间的维数之间 满足什么关系? 作业:P397-23-26
9-5 子空间
subspace
在这里讨论欧氏空间中子空间的正交关系
Definition10设 . V1 ,V2是欧氏空间V的两个
子空间,如果对于任意 的 V1、 V2 记为V1 V2,特殊地,如果 V1= 也称向 量与子空间V1正交,记为 V1 恒有(,)=0则称V1 ,V2为正交的,
1 2 , 其中( , 1 ) 0, 1 V1 , 2 V2 ( , 1 ) ( 1 2 , 1 ) ( 1 , 1 ) ( 2 , 1 ) 0 ( 1 , 1 ) 0, V ,V3 V2 ,
如果V1 V2 , 则V1 V2 0 只有零向量与自身正交 。
Theorem 5 如果子空间V1,V2, ,V s 两两正交,那么 和V1+V2+ V s 是直和。 证明:设有 1+ 2+ s 0, i Vi 由于V1,V2, ,V s 两两正交,用 i 作内积 得到 i=0,i 1,2, , s 零向量的表示法 唯一, 可见 V1+V2+ V s 是直和。
Definition 11.(正交补)子空间 V2 称为子空间V1的 正交补,如果V1 V2 , 并且V1 V2 V。 Theorem6. 欧氏空间V的每一个子空间 V1都有 唯一的正交补 . 设V1 0, V1也是欧氏空间,有一组 正交基 证明:如果V1 0, V1的正交补是V , 命题成立;
高等代数9-2
有
( , ) ( X )T Y X T AT Y X T ( AY ) ( , )
σ是一个对称变换.
在标准正交基下,对称变换与对称矩阵对应.
定理 对于任意一个n阶实对称矩阵A , 都存在一个n阶正交 矩阵T ,使T T AT T 1 AT为对角矩阵.
定理12 如果σ是n维欧氏空间V的一个对称变换,那么可找
sin x cos y
1 (1,0), 2 (0,1)是一组标准正交基
T 1 (cos , sin ) cos 1 sin 2 T 2 ( sin , cos ) sin 1 cos 2
则称 σ为一个对称变换.
二、 对称变换与对称矩阵的关系
设是n维欧氏空间V的一个对称变换, 1 , 2 , , n 是V的一组 标准正交基. 并设在基 1 , 2 , , n 下的矩阵是
a11 a 21 A a n1 a12 a 22 an2 a1 n a2n a nn
定理6 n维欧氏空间V的每一个子空间V1 都有唯一的正交补.
下证唯一性
设W1 ,W2都是W的正交补,则 V W W1 任取 1 W1 , 则 1 V . 由( 2 )得,1 2
( , ) 0
(1 ) (2)
V W W2
W , 2 W2
证 先证存在性
若W 0, 则正交补就是V . 若W V , 则正交补就是0. 设W V ,0 :
在W中取一组正交基 1 , 2 , , m (1 m n )
把它扩充成V的一组正交基
1 , 2 ,, m , m 1 , , n
那么子空间L( m 1 , , m )就是W的正交补.
标准正交基
注:① 子空间W的正交补记为 W . 即
W V W
② n 维欧氏空间V的子空间W满足: i) (W ) W ii) dimW dimW dimV n iii) W W V ⅳ) W的正交补 W 必是W的余子空间.
但一般地,子空间W的余子空间未必是其正交补.
§9.5 子空间
§9.5 子空间
一、正交子空间 二、子空间的正交补
§9.5 子空间
一、欧氏空间中的正交子空间
1.定义:
1) V1 与V2 是欧氏空间V中的两个子空间,如果对
V1, V2 , 恒有 ( , ) 0,
则称子空间 V1 与 V2为正交的,记作 V1 V2 .
2) 对给定向量 V , 如果对 V1, 恒有 ( , ) 0,
m
n
mn
( , ) ( xii , x j j )
xi x j ( i , j ) 0
i 1
jm1
i1 jm1
V1 V2 .
§9.5 子空间设 V2 ,V3 是V1 的正交补,则
V V1 V2 V1 V3
对 V2 , 由上式知 V1 V3
3.内射影
设W是欧氏空间V的子空间,由 V W W ,
对 V , 有唯一的 1 W , 2 W , 使 1 2
称 1 为 在子空间W上的内射影.
§9.5 子空间
即有 1 3 , 1 V1, 3 V3
又 V1 V2 , V1 V3 1 3 , 1,
从而有 ( ,1 ) (1 3 ,1 ) (1,1 ) (3 ,1)
(1,1 ) 0 由此可得 1 0, 即有 V3
同理可证 V3 V2 , V2 V3 .
§9.5 子空间
V2 V3 . 唯一性得证.
正交分解定理
正交分解定理正交分解定理(Orthogonal Decomposition Theorem)是线性代数中的一个重要定理,其描述了一个向量空间可以表示为两个正交子空间直和的形式。
正交分解定理被广泛应用于信号处理、图像压缩和最小二乘解等领域。
在线性代数中,一个向量空间V的两个子空间U和W被称为正交的,如果对于U中的任意向量u和W中的任意向量w,它们的内积为零,即<u,w>=0。
正交的子空间意味着其中的向量在空间中是互相垂直的。
根据正交分解定理,对于任意一个向量空间V,它可以表示为两个正交子空间U和W的直和形式,即V=U⊕W。
其中,U是一个U空间的基的生成子空间,W是一个W空间的基的生成子空间。
直和符号⊕表示V中的任意向量可以唯一地表示为空间U和空间W中的向量的和。
正交分解定理的一个重要应用是最小二乘解(Least Square Solutions)。
最小二乘解是一种对于超定方程组的解的近似方法。
当一个方程组存在无解或者解不唯一的情况时,最小二乘解可以找到一个向量使得方程组的残差最小。
最小二乘解可以通过正交分解定理来推导。
设A为m×n的矩阵,其中m>n,对于任意向量b∈ℝ^m,我们希望找到一个解x∈ℝ^n,使得Ax≈b。
根据正交分解定理,我们将A分解为两个正交子空间的直和形式,即A=[U|W],其中U∈ℝ^m×n,W∈ℝ^m×(m-n)。
则最小二乘解可以表示为x=(U^TU)^-1U^Tb。
在信号处理领域,正交分解定理被广泛应用于信号压缩和噪声去除等问题上。
对于一个信号,可以将其正交分解为不同频率的分量信号。
利用这种分解,可以将信号的主要信息保留下来,而滤除掉无关的噪声或者干扰。
例如,将一个音频信号进行正交分解,可以得到频谱图。
频谱图展示了信号在不同频率上的能量分布情况,可以帮助我们分析和理解信号的特性。
在图像压缩方面,也可以利用正交分解定理将图像分解为不同类别的子图像,然后根据子图像的重要性进行压缩,从而实现对图像的高效压缩和传输。
欧氏空间正交分解的一个应用
欧氏空间正交分解的一个应用
欧氏空间正交分解是一种将一个欧氏空间分解成两个正交子空间的方法。
这种分解的
应用非常广泛,涉及到众多领域,包括信号处理、图像处理、机器学习、优化等。
在信号处理中,欧氏空间正交分解被广泛应用于信号降噪。
通过将信号分解成低频和
高频两个正交子空间,可以选择性地去除高频噪声,从而实现信号的降噪。
这种方法在图
像去噪、语音降噪等方面有很好的效果。
在机器学习中,欧氏空间正交分解被用来降低维度。
通过将高维数据分解成低维和高
维两个正交子空间,可以选择性地保留数据的主要特征,从而降低数据的维度。
这种方法
可用于数据可视化、特征提取等方面。
在优化问题中,欧氏空间正交分解被用于求解约束优化问题。
通过将约束空间分解成
约束子空间和约束补子空间,可以将原问题分解成两个独立的子问题,从而简化求解过程。
这种方法在优化求解中具有很好的效果。
除了上述的应用,欧氏空间正交分解还可以用于时间序列分析、模式识别、数据压缩
等方面。
欧氏空间正交分解是一种非常有用的数学工具,可以帮助我们理解和处理各种复
杂的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Department of Mathematics
定理:设W1,W2都是酉(欧氏)空间V的子空间,则
(1) (W1 W2 ) W1 W2 (2) (W1 W2 ) W1 W2
Department of Mathematics
§2.4 酉(正交)变换、正交投影 一, 酉变换与正交变换 1.酉(正交)变换的定义
同理可证 V3 V2 , V2 V3 . 唯一性得证.
Department of Mathematics
注:
① 子空间W的正交补记为 W . 即
W V W
② n 维欧氏空间V的子空间W满足: i) (W ) W ii) dimW dimW dimV n iii) W W V ⅳ) W的正交补 W 必是W的余子空间.
③ 当 V1 且 V1 时,必有 0. ④ 若 V1 V2 ,则: dim( V1 V2 ) dim V1 dim V2
Department of Mathematics
2,定理:
(1),设酉(欧氏)空间 V L [正交基,则:
L(i ) L( j ) , i j, i, j 1,2, , n
V1 V2 V , 则称 V2 为 V1 的正交补子空间.
记作 V2 V1 or 2,定理:
V1 V2
A C mn , then R( A) N ( AH ) C m and R( A) N ( AH )
证 明
dim N ( AH ) m dim R( AH )
:
m rank AH
第二章
内积空间
Department of Mathematics
§2.3 正交子空间
一,子空间的正交 1,定义:
1) 设 V1是欧氏(酉)空间V中的子空间, V , 如果对 V1, 恒有 ( , ) 0, 则称向量 与子空间 V1 正交,记作 V1.
2) V1 与V2 是欧氏(酉)空间V中的两个子空间,如果对
V1, V2 , 恒有 ( , ) 0
则称子空间 V1 与 V2为正交的,记作 V1 V2 .
Department of Mathematics
说明: ① V1 V2当且仅当 V1中每个向量都与 V2正交. ② V1 V2 V1 I V2 {0}.
Q V1 I V2 ( , ) 0 0.
y t1b1 t2b2 tsbs t1 , t2 , , ts C
ms
则有: ( x, y)
kit j (ai ,bj ) 0
i1 j1
即:
R( A) R(B)
Department of Mathematics
二、正交子空间的和 1. 正交补的定义:
如果欧氏空间V的子空间 V1,V2满足 V1 V2 , 并且
定义: 设 V 是一个 n 维酉(正交)空间V,T 是
对 V2 , 由上式知 V1 V3 即有 1 3 , 1 V1, 3 V3 又 V1 V2 , V1 V3 1 3 , 1, 从而有 ( ,1 ) (1 3 ,1 ) (1,1 ) (3 ,1)
(1,1 ) 0 由此可得 1 0, 即有 V3 V2 V3 .
但一般地,子空间W的余子空间未必是其正交补.
Department of Mathematics
例: 设 W1=L(1,2 ), 1 [1,1, 0]T , 2 [0,1,1]T 求W1的正交补空间W2使得 R3 W1 W2
解 将 1 ,2 扩充为 R3 的基 1,2 ,3 ,其中取
3 [1, 0, 0]T ,将 1 ,2 ,3 用施密特正交化方法
化为 R3 的正交基
Department of Mathematics
1 1 (1,1,0)T
2
2
(2 , 1 ) (1 , 1 )
1
(
1 2
,
1 2
,1)T
3
3
(3 (1
, ,
1 1
) )
1
( (
3 2
, ,
2 2
) )
2
( 1 , 1 , 1 )T 3 33
则 W1 L(1 , 2 ), W2 W1 L(3 )
j
i
0 i 1, 2,L , m; j 1, 2,L , s
BH A 0
Department of Mathematics
反之,
BH A 0
bHa ji
(a i
,bj )
0
i
1, 2,L
, m;
j
1, 2,L
,s
x R( A), y R(B) 令:
x k1a1 k2a2 kmam k1 , k2 , , km C
取 V1 的一组正交基 1, 2 ,L , m ,
由定理,它可扩充成V的一组正交基
1, 2 ,L , m , m1,L , n ,
Department of Mathematics
记子空间 L m1,L , n V2 .
显然, V1 V2 V .
又对 x11 x2 2 L xm m V1,
xm1 m1 L xn n V2 ,
m
n
mn
( , ) ( xii , x j j )
xi x j ( i , j ) 0
i 1
jm1
i1 jm1
V1 V2 . 即 V2 为 V1的正交补.
且, V1 V2 V .
Department of Mathematics
再证唯一性. 设 V2 ,V3 是V1 的正交补,则 V V1 V2 V1 V3
(2),设 A C nm (Rnm ), B C ns (Rns ) ,则:
R( A) R(B) BH A 0
证明:设: A [a1, a2 , , am ] , B [b1, b2 , , bs ]
Q R( A) R(B) ai R( A), bj R(B)
(a i
, bj
)
bHa
m rank A m dim R( A)
Department of Mathematics
2.n维欧氏(酉)空间V的每个子空间 V1 都有唯
一正交补V2=V1┴, 使得V=V1 V2.
证明:当 V1 {0} 时,V 就是 V1 的唯一正交补. 当 V1 {0} 时,V1 也是有限维欧氏空间.