神经网络用于永磁同步电机系统波动力矩补偿
基于神经网络补偿的永磁同步电机控制
( De p a r t me n t o f E l e c t r o n i c I n f o r m a t i o n a n d C o n t r o l E n g i n e e r i n g ,G u a n g x i Un i v e r s i t y o f T e c h n o l o g y ,L i u z h o u 5 4 5 0 0 6 ,C h i n a )
s a t i o n .S i mu l a t i o n r e s u l t s s h o w t h a t b o t h t h e s y s t e m t r a c k i n g c h a r a c t e r i s t i c s a n d a n t i - j a mmi n g p e f r o r ma n c e a r e i m-
摘
5 4 5 0 0 6 )
要 当永 磁 同 步 电机 采 用 矢量 控 制 策 略 时 , 为 了在 改善 系统 跟 踪 性 能 的 同 时 兼 顾 系统 的抗 干 扰 性 能 ,可 以将
速度环控制 由一 自由度 P I D控制改为二 自由度 P I D控 制 ,改善 系统的跟踪性 能和抗 干扰 性能 ,此 外 由于 P I D控 制参数
T M2 7 3 文献标识码 A 文章编号 1 0 0 7— 7 8 2 0 ( 2 0 1 3 ) 0 4—1 4 3— 0 4 中图分类号
PM SM Co n t r o l Ba s e d o n Ne ur a l Ne t wor k Co mp e n s at i o n
伺服控制系统课程论文
伺服控制系统课程作业现代伺服系统综述指导教师:学生:学号:专业:班级:完成日期:摘要在自动控制系统中,把输出量能够以一定准确度跟随输入量的变化而变化的系统称为伺服系统。
伺服系统也叫位置随动系统,以精确运动控制和力能输出为目的,综合运用机电能量变换与驱动控制技术、检测技术、自动控制技术、计算机控制技术等,实现精确驱动与系统控制。
伺服系统主要包括电机和驱动器两部分,广泛用于航空、航天、国防及工业自动化等自动控制领域。
伺服系统按其驱动元件划分有步进式伺服系统、直流电动机伺服系统和交流电动机伺服系统。
随着微处理器技术、大功率高性能半导体功率器件技术、电机永磁材料制造工艺的发展及电力电子、控制理论的应用,交流电动机伺服系统近年来获得了迅速发展,广泛用于工业生产的各个领域,如数控机床的进给驱动和工业机器人的伺服驱动等。
因此,在相当大的范围内,交流电动机伺服系统取代了步进电动机与直流电动机伺服系统,时至目前,具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,其动、静态特性已完全可与直流伺服系统相媲美,已成为伺服系统的主流。
关键词:伺服系统自动控制驱动元件1 伺服系统的发展阶段伺服系统的发展与它的驱动元件——伺服电动机的不同发展阶段相联系,并结合老师在第一章所讲的伺服系统分类的知识,伺服电动机至今经历了三个主要的发展阶段。
(1)第一个发展阶段(20世纪60年代以前):步进电动机开环伺服系统;伺服系统的驱动电机为步进电动机或功率步进电动机,位置控制为开环系统。
步进电机是一种将电脉冲转化为角位移的执行机构,两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72°、0.36°;步进电机存在一些缺点:在低速时易出现低频振动现象;一般不具有过载能力;步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转现象,停止时转速过高易出现过冲现象。
永磁同步风力发电系统控制研究
永磁同步风力发电系统控制研究随着气候变化和环境保护意识的日益增强,可再生能源的研究与应用变得越来越重要。
风能作为一种广泛分布且可再生的能源资源,被广泛应用于发电领域。
在风能发电系统中,永磁同步发电机系统因其高效率、高性能和简洁结构而备受关注。
为实现对永磁同步风力发电系统的控制,研究控制策略和算法变得至关重要。
永磁同步风力发电系统的控制是确保发电效率和系统稳定运行的关键。
因此,研究人员们对于系统的控制策略进行了广泛研究,以提高发电系统的性能和可靠性。
首先,针对永磁同步发电机系统的控制,矢量控制是最常用和有效的控制策略之一。
矢量控制通过监测永磁发电机的电流和转速,控制它们的大小和方向,以确保系统的稳定性和高效性。
矢量控制策略采用PI控制器来实现闭环控制,根据当前状态进行动态调整,以使输出电压和转速保持在一个可接受的范围内。
其次,为了提高永磁同步发电机系统的效率和性能,一些高级控制算法被引入。
例如,模糊控制策略能够根据设定的规则和输入参数来自适应地调整系统的控制策略。
这种方法可以提高系统的鲁棒性和适应性,使其能够在不同的工况下具有良好的性能。
另外,基于神经网络的控制算法也被广泛应用于永磁同步风力发电系统的控制中。
神经网络是一种模拟人类神经系统的计算模型,其具有自学习和适应性的能力。
通过训练和优化神经网络模型,可以根据风能发电系统的输入和输出数据,实现系统的自动控制和优化。
神经网络控制具有较高的灵活性和适应性,可以处理复杂的非线性系统。
此外,针对永磁同步风力发电系统控制中的低频振荡问题,一些控制策略也被提出。
例如,采用模型参考自适应控制(MRAC)策略可以有效地抑制低频振荡,提高系统的稳定性和准确性。
MRAC策略通过调整系统的控制参数,根据系统的数学模型来实现对系统的控制。
综上所述,永磁同步风力发电系统控制的研究是提高发电效率和系统性能的关键。
矢量控制、模糊控制、神经网络控制和MRAC策略等多种控制策略和算法被应用于系统的控制中,以提高系统的鲁棒性和适应性。
永磁同步电机的转矩直接控制
永磁同步电机的转矩直接控制一、本文概述本文旨在探讨永磁同步电机(PMSM)的转矩直接控制策略。
永磁同步电机作为现代电力传动系统中的核心组件,具有高效率、高功率密度和优良的控制性能。
转矩直接控制作为一种先进的电机控制技术,能够实现对电机转矩的快速、精确控制,从而提高电机系统的动态响应性能和稳定性。
本文首先将对永磁同步电机的基本结构和原理进行简要介绍,为后续转矩直接控制策略的研究奠定基础。
随后,将详细阐述转矩直接控制的基本原理和实现方法,包括转矩计算、控制器设计和优化等方面。
在此基础上,本文将重点分析转矩直接控制在永磁同步电机中的应用,探讨其在实际运行中的优势和局限性。
本文还将对转矩直接控制策略的性能进行仿真和实验研究,评估其在不同工况下的控制效果。
通过对比分析,本文将提出改进和优化转矩直接控制策略的方法,以提高永磁同步电机的控制性能和运行效率。
本文将对转矩直接控制在永磁同步电机中的应用前景进行展望,探讨其在新能源汽车、工业自动化等领域的发展潜力。
本文的研究成果将为永磁同步电机的转矩直接控制提供理论支持和实践指导,推动其在现代电力传动系统中的广泛应用。
二、永磁同步电机的基本原理永磁同步电机(PMSM)是一种特殊的同步电机,其磁场源由永磁体提供,无需外部电源供电。
PMSM利用磁场相互作用产生转矩,从而实现电机的旋转运动。
PMSM的定子部分与常规电机相似,由三相绕组构成,用于产生电磁场。
而转子部分则装有永磁体,这些永磁体产生的磁场与定子绕组的电磁场相互作用,产生转矩。
PMSM的转矩大小和方向取决于定子电流的大小、方向以及永磁体与定子绕组磁场之间的相对位置。
PMSM的控制主要依赖于对定子电流的控制。
通过改变定子电流的大小、频率和相位,可以实现对PMSM转矩和转速的精确控制。
与传统的感应电机相比,PMSM具有更高的转矩密度和效率,以及更低的维护成本。
PMSM的工作原理基于法拉第电磁感应定律和安培环路定律。
当定子绕组通电时,会产生一个旋转磁场,这个磁场与转子上的永磁体磁场相互作用,产生转矩。
多永磁电机传动系统的同步控制策略研究
多永磁电机传动系统的同步控制策略研究多永磁电机传动系统是指由多个永磁电机组成的传动系统。
在这种系统中,多个永磁电机可以合作完成一项任务,通过协调各个电机的运行状态和输出功率,实现对传动系统的同步控制。
同步控制策略是指采用何种方法和算法来实现多永磁电机传动系统的同步控制。
下面将从传动系统调速、负载分配、控制算法等方面进行论述,总结多永磁电机传动系统同步控制策略的研究。
首先,传动系统调速是多永磁电机传动系统同步控制的关键环节。
在传动系统中,每个永磁电机都有不同的速度和转矩特性,通过控制各个电机的转速,可以实现传动系统的同步运行。
传动系统调速涉及到速度控制算法的设计和实现,可以采用闭环控制或开环控制方式。
闭环控制通过测量每个电机的转速反馈信号,并与给定的转速进行比较来调整电机输出功率,实现传动系统的同步运行。
开环控制则根据预先设定的转速模式控制各个电机的输出功率,实现传动系统的同步控制。
不同的调速方法和算法对传动系统的同步控制效果有影响,可以根据具体的应用场景选择合适的调速方法。
其次,负载分配是多永磁电机传动系统同步控制策略的另一个重要方面。
在传动系统中,不同的电机承担着不同的负载。
通过合理地分配负载,可以避免某个电机过载或负载不均衡的情况,保证传动系统的同步运行。
负载分配可以根据电机的转矩特性、转速和工作状态进行调整,可以采用静态负载分配或动态负载分配策略。
静态负载分配是根据电机的额定转矩和负载需求进行分配,而动态负载分配则是根据电机的实际转速和转矩来动态调整负载分配。
负载分配的合理性和准确性对传动系统的同步控制效果有着重要的影响,需要根据实际情况进行研究和调整。
最后,控制算法是实现多永磁电机传动系统同步控制的核心。
传统的控制算法包括PID控制、模糊控制和神经网络控制等方法。
PID控制是一种经典的控制方法,通过调整比例、积分和微分系数来实现对传动系统的同步控制。
模糊控制则采用模糊集合和模糊推理来处理传动系统的非线性和不确定性,实现同步控制。
采用神经网络控制的永磁同步电机调速系统

( MS ) P M 调速系统性能 , 设计了神经 网络速度 控制器并 对其构 成的矢量控制 系统 进行了仿真分析。 结果 表明 , 当 电机参 数改变或 受到 外部扰 动时, 系统具 有更好 的动 该
态性能 。 关键词: 永磁同步电动机 矢量控制 神经 网络
Ab t a t I r e 'o i r v h e f r n e o e s r c : n o d rt mp o e t e p ro ma c ft h P r n n a n t y c rn u oo ’ s e dc nr l y . e ma e t M g e n h o o sM t r p e o to s S s s t m a e r l e wo k i e i n d a d smu a i n r s a c e n n u a t r sd s g e n i lt e e r h n o
m- qf - pn/i q
可见 , q 系 永 磁 同步 电动机 的 电磁 转 在d 轴
目 电机控 制系统普 遍 采用P D 制算法 。 前 I控 它
矩是 由f 决定的, 要想控制电磁转矩 , 只要控制 。 的大小并 保持 r 为定值即可。 为使 电动机 获得最
大加速 转矩 , 用i O 采 d 控制策 略。 =
Ke ywor ds: er a n a e P m ne tM gn tSyn hr no o o c o usM t r Ve t on r l N e a e wor corc to ur ln t k
对于外贴式转子结构的永磁同步电动机 , 由 于稀土永磁材料的相对回复磁导率接近于1所 以 , 在电磁性能上属于隐极转子结构, dL , 即 - 。故有
1 永磁同步 电机矢量控制
基于神经网络的永磁同步电动机转矩脉动补偿
m g e snhoo s o r( M M) B t t ie n o tadwt ca g g o r a m t ,r i sma an t ycrnu t sP S . u a d r t i s n i n i t r e r pe s et m o f e p n h h n m op a e s ce i
( N) adte yB cs p i ot l e o e u s f ouan ew i t o N dt upt fh N , nb akt p g nr t dt l dl i t eg s f Na eot e n h e n c om h h r e om tgh h n h u ot cnr l e ba e .i uao n i t ga poes g D P xe met e l o a te r oe ot l r t nd Sm lin ddg a s l r s n ( S )ep r n rs ts wt th o sd oe a o i r t a i i c i l n i u sh h p p
s t n. ai o
维普资讯
第3 9卷
第 8期
天
津
ቤተ መጻሕፍቲ ባይዱ
大
学
学
报
Vo _ 9 No 8 l3 . Aug 2 06 . 0
20 0 6年 8月
J u n l f ini nvri o ra a j U iesy oT n t
基 于神 经 网络 的 永磁 同步 电动 机 转 矩 脉 动 补偿
nua nto s R FN e r e r ( B N)a etr er pecm estnt cnr h MS Fr , et q er pei l w k s h q pl o pnao ot l eP M. i tt ru p l s t ou i i o ot s h o i
永磁同步电机输出扭矩受温度影响的修正方法与流程
永磁同步电机输出扭矩受温度影响的修正方法与流程永磁同步电机作为工业生产中的重要驱动设备,其输出扭矩的稳定性对生产效率和产品质量具有重大影响。
温度是影响永磁同步电机输出扭矩的一个重要因素。
本文将详细介绍永磁同步电机输出扭矩受温度影响的修正方法与流程,以帮助工程师确保电机在各种温度环境下都能保持良好的性能。
一、温度对永磁同步电机输出扭矩的影响永磁同步电机的输出扭矩受到温度的影响,主要表现在以下几个方面:1.磁阻变化:温度升高时,永磁材料的磁阻会增加,导致电机内部磁通的分布发生变化,从而影响输出扭矩。
2.铜损变化:电机运行过程中,绕组电阻随温度升高而增大,导致铜损增加,影响电机输出扭矩。
3.永磁体退磁:高温可能导致永磁体部分退磁,使得电机输出扭矩下降。
二、修正方法与流程1.修正方法(1)参数辨识法:通过实验测量不同温度下的电机参数(如电阻、电感、磁通等),建立温度与电机参数之间的关系模型,从而对输出扭矩进行修正。
(2)查表法:根据实验数据,制作输出扭矩与温度的查找表格。
在实际运行过程中,根据当前温度查找对应的输出扭矩值,进行修正。
(3)神经网络法:利用神经网络建立输出扭矩与温度之间的非线性关系模型,实现对电机输出扭矩的精确修正。
2.修正流程(1)温度检测:在电机运行过程中,实时检测电机温度,为后续修正提供数据支持。
(2)参数辨识:根据温度检测结果,辨识电机参数变化,计算温度对输出扭矩的影响。
(3)查表或神经网络计算:根据温度与输出扭矩的关系模型,查表或利用神经网络计算修正后的输出扭矩。
(4)控制器调整:根据修正后的输出扭矩,调整电机控制器参数,确保电机在实际运行中达到预期的性能。
三、注意事项1.实验数据的准确性对修正效果具有重要影响,因此在制作查找表格或建立关系模型时,需保证实验数据的可靠性。
2.修正方法的选择应根据实际应用场景和需求来确定,综合考虑成本、精度和实时性等因素。
3.在实际运行过程中,应定期检查和校准温度检测设备,确保温度数据的准确性。
基于RBF神经网络的永磁同步电机矢量控制系统
基于RBF神经网络的永磁同步电机矢量控制系统
周炎;施伟锋;张威
【期刊名称】《船电技术》
【年(卷),期】2016(036)008
【摘要】永磁同步电机(PMSM)数学模型是非线性、强耦合、多变量的.传统的矢量控制采用双闭环控制,转速环和电流环都是采用的传统的PID控制器.针对PID控制方法的不足,提出一种基于径向基函数神经网络的在线辨识的单神经元PID模型参考自适应控制方法,利用神经网络对信息数据的自学习和自适应能力,提高系统对环境改变的稳定性,仿真实验表明,系统很好的实现了给定速度参考模型的自适应跟踪,结构简单,能适应环境变化,具有较强的鲁棒性.
【总页数】4页(P73-76)
【作者】周炎;施伟锋;张威
【作者单位】上海海事大学物流工程学院,上海201306;上海海事大学物流工程学院,上海201306;上海海事大学物流工程学院,上海201306
【正文语种】中文
【中图分类】TM351
【相关文献】
1.基于RBF神经网络在线辨识的永磁同步电机单神经元PID矢量控制 [J], 邵伍周;唐忠;蔡智慧;邹云屏
2.基于双空间矢量调制的矩阵变换器-永磁同步电机矢量控制系统 [J], 张绍;周波;
葛红娟
3.基于SIMULINK的永磁同步电机矢量控制系统仿真 [J], 艾建兵;胡永俊;吴金富
4.基于双曲正切函数的改进型永磁同步电机无感矢量控制系统 [J], 张攀;石照耀;林家春;于渤;孙衍强;丁宏钰
5.基于DSP28335的永磁同步电机PI矢量控制系统设计 [J], 洪锋;冒国均;陈国真因版权原因,仅展示原文概要,查看原文内容请购买。
基于BP神经网络的永磁同步电机的转速控制
用价值 。本文对合 环操作有 了比较全面的研究后 ,采用面 向对象技术 , ̄V i s u a l C + + 6 . 0 作为配电网合环决策软件的开发工具 ,并详细 的分析 了软件 的设计 以及 系统的功
能。
【 关键词 】配电网;合环操作 ;稳 态电流 ;冲击 电流
联 和共 享 问题 ,本文采 用第 二 种存储 方 式 。 软 件 中各模 块间 的关 系如 图1 所示。 其 中 ,界 面 部 分 作 为 主 控 模 块 ,负 责 的供 电方 式 。在 倒 负荷或 线路 检修 时 ,通 过 v c + + 作 为 开 发 平 台 ,借 助 标准 的 窗 口 、菜 合 、解 环 操作 可 以减 少停 电时 间 ,提高供 电 单 、对 话框 等 图形 界面 ,使得 整个 软件 内部 数据 的录入 、查 询 、修 改等工 作 ,同时 具有 可靠性 ,但 由此引起 的环 流 ,对配 电 网的安 功能 转换和 连 接十 分平滑 ,界 面美 观 ,操 作 图表 输 出 功 能 。界 面 模 块 接 受 使 用 者 的命 全 运 行有 很大 的影 响 …。通过对 可 能 的合环 逻辑 性强 , 易于学 习和使 用 。 令 ,调用运 行 软件 的功 能模块 。功 能模 块用
I 一 皇 研霾…………………………一
配 电网合环决策 系统 的设计 与分析
山东省 邹城 市供 电公 司 刘令 民 湖南电力检修公 司 刘令 富
浙 江省 金 华 市供 电公 司 金 从 友
【 摘要 】在 配电网进 行倒负荷操作 或线路检修进行 时,通 常涉及 到合环操作 ,进行合环操作 时电网中可 能会产 生较大 的稳态 电流及冲击 电流 ,这将直接影响 到电网的安 全稳 定运行。针对 以上特 点,开发一套配 电网合环决 策软件 ,使之在合 环操 作前可 以通过 系统的仿真从而对合环操作起 到一定 的指导作用 ,具有很 强的研 究意义和实
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
加一个频率为电机电频率整数倍的正弦微量作为
补偿输入 ,则有
Vin = V - + Vνc = V - +ΔVνcsin (νωe t + <νc) .
式中 : V - 为控制指令的直流电平 ; Vνc 为正弦补偿
微量 ;ΔVνc 为补偿输入幅值 ,ΔVνc ν V - ;ν为补偿
谐波次数 ; <νc 为正弦补偿的相位.
Abstract : The ripple torque of a motor is a key factor having effect on the response precision of the servo system. For a permanent magnet synchronous motor system in constant speed operation , a method is proposed for suppression of the ripple torque by superposing a compensative component in the command input of the motor system , and a cor2 responding multiplayer feedforward neural network is constructed to produce the compensative component . The neu2 ral network is trained by the developed BP network ——— SPDS algorithm , satisfiactory experiment results are pre2 sented to show the implementation of ripple torque compensation by successfully trained neural network. Key words : permanent magnet synchronous motor ; ripple torque compensation ; neural network
系统 ,电磁波动力矩是电机系统波动力矩的主要
因素. 同时 ,电机系统的波动力矩 Tr 可表述为
∑ Tr = δTνsin (νωe t + φν) . ν
式中 : δTν 为电机系统ν次波动力矩的幅值 ,φν为 ν次波动力矩的相位.
精密离心机稳速工作状态下所对应的电机系
统的控制指令为直流电平. 如果在控制指令中叠
文章编号 : 0367 - 6234 (2003) 01 - 0005 - 03
Application of neural net work for ripple torque compensation of permanent magnet synchronous motor system
ZHAO Hui1 , FENG Ying2jun2 , ZHANG Zhi2zhong1 , WANG Xue2feng1
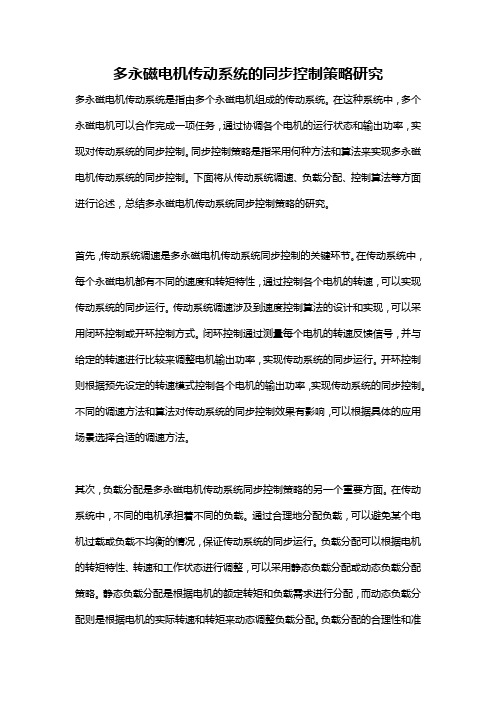
图 2 基于神经网络的波动力矩补偿系统框图 Fig. 2 Block diagram of ripple torque compensation system by
neural network
神经网络通过样本训练 , 将对象特性储存于 神经网络的连接权值和阈值中. 为满足训练样本 准确反映对象特性 ,并具有足够的覆盖面的要求 , 在覆盖精密离心机工作点的范围内以图 3 所示步
精密离心机是恒温封闭环境下工作的恒速风 阻负载 ,其稳速精度指标达到 1 ×10 - 6. 直接驱动 其主轴的永磁同步电机系统的波动力矩影响精密 离心机的速率控制精度 ;并且电机波动力矩的频 率随电机角速度的变化而变化 ,对离心机速率调 节器提出了很高的带宽要求. 如果能充分降低电 机系统的波动力矩 ,则可为达到精密离心机的速 率精度要求创造非常有利的条件[1 ,2] .
(1. School of Electrical Engineering & Automation , Harbin Institute of Technology , Harbin 150001 , China ; 2. School of Science , Harbin Institute of Technology , Harbin 150001 , China)
冯英浚 (1940 - ) ,男 ,教授 ,博士生导师.
环控制方法 ,受电流调节器带宽的限制 ,只能将力 矩波动抑制到一定的水平. 第二类为基于在线力 矩观测器的力矩闭环控制方法 ,是当前研究的热 点 ;该方法对电机系统电参数 (相电流 、转速等) 的 测量精度和实时控制计算能力都有很高的要求 , 其控制模型和控制算法也正处于不断完善之中. 针对精密离心机在恒温封闭环境下恒速工作 ,本 文利用神经网络实现一种有别于这两类方法并易 于工程实现的抑制力矩波动的方法.
图 1 正弦波永磁同步电机系统框图 Fig. 1 Block diagram of sine wave brushless DC motor system
文献[ 1~4 ]对正弦波永磁同步电机系统的波
动力矩进行了详细分析 ,指出 :对于优化设计电机
磁钢形状和绕组分布 ,并且机械装配良好的电机
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
·6 ·
哈 尔 滨 工 业 大 学 学 报 第 35 卷
1 永磁同步电动机系统波动力矩补 偿原理
低波动力矩的永磁同步电动机系统一般采用 正弦波驱动方案 ,其系统框图由图 1 所示. 系统由 永磁同步电机 ( PMSM) 、逆变驱动电路和磁极位置 检测电路组成 ,根据磁极位置检测电路检测到的 永磁转子磁极位置 θe 和控制指令 Vin , 逆变驱动 电路产生三相正弦 PWM 电压驱动 PMSM.
根据文献[ 1 ] ,ν次补偿指令 Vνc 加于线性对
称电机系统 ,可产生相应的波动补偿力矩.
Tνc = Δ Tνcsin (νωe t + φνc) .
(1)
式中 :
ΔTνc
=
Kt
46ΔVνc
1 Zν2 +1
+
1 Zν2 - 1
+
2cos
( <ν+1 -
Zν+1 Zν-
<ν-
1
1)
为补偿力矩幅
值 , Kt = 3/ 2 Pψf , P 为电机磁极对数 , ψf 为电
机每相所链的永磁基波磁链 , Zν±1 为电机系统 (ν
±1) 次谐波阻抗 , <ν±1 为电机系统 (ν ±1) 次谐波
阻抗角 ,
φνc = tan- 1 力矩相位.
sin <ν+1/ Zν+1 + sin <ν- 1/ Zν- 1 为补偿 cos <ν+1/ Zν+1 + cos <ν- 1/ Zν- 1
第 35 卷 第 1 期 2 0 0 3年1月
哈 尔 滨 工 业 大 学 学 报
JOURNAL OF HARBIN INSTITUTE OF TECHNOLOGY
Vol135 No11
Jan. , 2003
神经网络用于永磁同步电机系统波动力矩补偿
赵 辉1 , 冯英浚2 , 张志忠1 , 王雪峰2
3 神经网络实现波动力矩补偿的实 验结果
对依据图 2 所实现的波动力矩补偿系统进行 了样机系统实验验证 ,样机的无补偿波动力矩如 图 4 所示 ,谐波成分如表 1 所示. 利用神经网络对 1 、2 、6 次波动力矩进行补偿后的波动力矩由图 5
图 4 样机无补偿的波动力矩波形 Fig. 4 Ripple torque waveform of prototype without compensa2
© 1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第1期
赵 辉 , 等 :神经网络用于永磁同步电机系统波动力矩补偿
·7 ·Βιβλιοθήκη 骤获取样本 ,方法为依次改变 <νc 、ΔVνc 、ωe 和 V - , 测得由此产生的 δTν、φν,构成每个形式为 : [ ( V - , ωe ,δTν,φν) (ΔVνc , <νc) ] 的样本.
<ν- 1/ <ν- 1/
Zν- 1 Zν- 1
=π +φν.
(2) 则ν次补偿力矩可以抵消永磁同步电机系统存在
的ν次波动力矩 ,在理想情况下 ,将使电机系统输 出力矩中不存在ν次波动力矩而实现波动力矩的
补偿. 以式 (1) 、(2) 计算补偿指令时 ,除超越方程较
难求解外 ,还难于准确测量得到电机系统工作点 处的各种电参数. 因此 ,需要寻找能很好反映电机
目前广泛应用的前馈式多层神经网络模型 , 理论上具有逼近任意非线性连续函数的能力 ,适 合于非线性系统的建模. 文献[ 5 ,6 ]提供一种新型 BP 网络学习算法 SPDS ( Single Parameter Dynamic Search) 算法 ,具有稳定 、快速收敛的特点 ,适于工 程应用.
(1. 哈尔滨工业大学 电气工程及自动化学院 , 黑龙江 哈尔滨 150001 ; 2. 哈尔滨工业大学 理学院 , 黑龙江 哈尔滨 150001)
摘 要 : 电机系统的波动力矩是影响精密伺服系统响应精度的一个关键因素. 对恒速工作的永磁同步电机
系统进行分析并提出了在电机系统控制指令中叠加补偿指令的抑制波动力矩方法 ,构造了相应的多层前馈
可见 :通过控制电机指令中所加 ν次正弦补