Bode图绘制例题
奈奎斯特稳定性判据
时,可应用对数频率特性稳定性判据,判定系统的 稳定性。基于Bode图和基于Nyquist图的两种稳定性 判据是一致的,只是坐标系不同而已。 负反馈闭环系统,位于右半s平面极点的个数为
(3)
二、对数频率特性稳定性判据
式中:P —开环传递函数位于右半s平面极点的个 数;
—N 相 频特性曲线正穿越次数。在 L() 0 对应的频率范围内, 自下(而) 上穿越 (2k线1的)次18数0 ,其中自下而上起 始于或终止于该线的次数,折半计算; N —相频特性曲线负穿越次数。在 L() 0 对应的频率范围内, (自 )上而下穿越 (2k1)线18的0次数,其中自上而下起 始于或终止于该线的次数,折半计算;
【2 开环对数频率曲线(Bode图)的绘制】
1 思路:将复杂的 G(s)H(s)分解为典型环节的串联
G (s) G 1 (s)G 2 (s)G 3 (s).G .k .(s.)..
L ( () ) 2 G l( G 0 g j(j )H ) ( H j(j ) ) G 2 1 l G 0 g G 1 2 2 l G 0 g G 2k 2lG 0 g k
Z —闭环传递函数,位于右半s平面极点的 个数,即特征方程位于右半s平面根的 个数。
一、奈奎斯特稳定性判据
【3 奈奎斯特稳定性判据】
由式(1)可知:系统渐近稳定的充分必要条件是 (2)
由式(1)还可知:渐近稳定的必要条件是 N ;N 发散不稳定的充分条件是 N 。N 当开环频率特性通过[GH]平面上点时,且当曲线 在点 (1, 左j0)右作微小移动时,会使系统由渐近 稳定变成发散不稳定,或会使系统由发散不稳定 变成渐近稳定,系统称为临界稳定。
三、例题详解
【解答】 首先将各点的坐标改写成
典型环节的Bode图
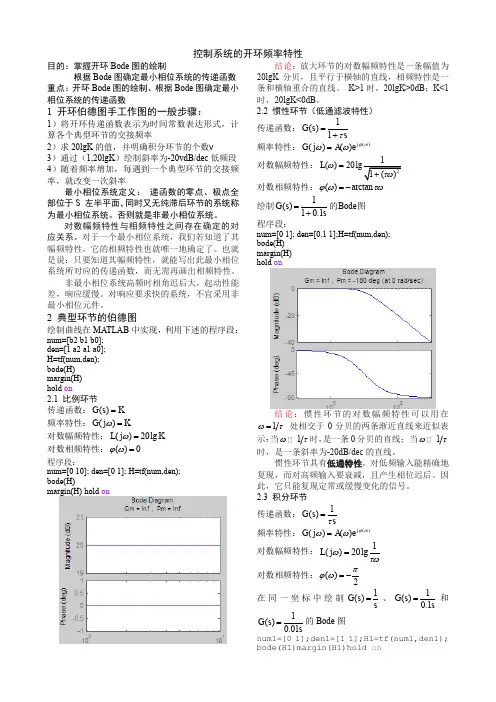
控制系统的开环频率特性目的:掌握开环Bode 图的绘制根据Bode 图确定最小相位系统的传递函数 重点:开环Bode 图的绘制、根据Bode 图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK 的值,并明确积分环节的个数ν 3)通过(1,20lgK )绘制斜率为-20vdB/dec 低频段 4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义: 递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
2 典型环节的伯德图绘制曲线在MA TLAB 中实现,利用下述的程序段:num=[b2 b1 b0]; den=[1 a2 a1 a0]; H=tf(num,den); bode(H) margin(H) hold on2.1 比例环节传递函数:()G s K = 频率特性:()G j K ω=对数幅频特性:()20lg L j K ω= 对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den); bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK 分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
K>1时,20lgK>0dB ;K<1时,20lgK<0dB 。
2.2 惯性环节(低通滤波特性)传递函数:1()1G s sτ=+频率特性:()()()j G j A e ϕωωω=对数幅频特性:21()20lg 1()L ωτω=+对数相频特性:()arctan ϕωτω=-绘制1()10.1G s s=+的Bode 图程序段:num=[0 1]; den=[0.1 1];H=tf(num,den); bode(H) margin(H) holdon结论:惯性环节的对数幅频特性可以用在1ωτ= 处相交于0分贝的两条渐近直线来近似表示:当1ωτ时,是一条0分贝的直线; 当1ωτ时,是一条斜率为-20dB/dec 的直线。
考研复习题典型环节伯德图

其幅频特性是:
对数幅频特性为:
放大环节的对数幅频特性如图5-11所示,它是一条与角 频率ω无关且平行于横轴的直线,其纵坐标为20lgK。 当有n个放大环节串联时,即:
(5-62)
幅值的总分贝数为:
(5-63)
放大环节的相频特性是:
(5-64)
如图5-11所示,它是一条与角频率ω无 关且与ω轴重合的直线。
由图5-19可看出,振荡 环节的对数幅频特性在 转折频率 附近产生 谐振峰值,这是该环节 固有振荡性能在频率特 性上的反映。前面已经 分析过,谐振频率ωr 和谐振峰Mr分别为:
振荡环节对数幅频率特性图
其中 称为振荡环节的无阻尼(ξ=0)自 然振荡频率,它也是渐近线的转折频率。由式(581)可知,当阻尼比ξ愈小谐振频率ωr愈接近无阻 尼自然振荡频率ωn,当ξ=0时,ωr=ωn
当有n个积分环节串联时,即: 其对数幅频特性为: 相频特性是一条与ω无关, 值为-n×900 且与ω轴平行 的直线。两个积分环节串联 的Bode图如图5-13所示。
是一条斜率为-n×20dB/dec, 且在ω=1(弧度/秒)处过零 分贝线(ω轴)的直线。
图5-13 两个积分环节串联的Bode图
三惯性环节 惯性环节的频率特性是: 其对数幅频特性是: 用两条直线近似描述惯性环节的对数幅频特性, 即在 的低频段时, ,与零分贝线重合; 在 的高频段时 是一条斜率为 -20(dB/dec.)的直线。 两条直线在 处相交, 称为转折频率,由这两 条直线构成的折线称为对数幅频特性的渐近线。如图514所示。
二积分环节
积分环节的频率特性是: 其幅频特性为: 对数幅频特性是:
设
,则有: (5-68)
可见,其对数幅频特性是一条 在ω=1(弧度/秒)处穿过零分贝 线(ω轴),且以每增加十倍频率 降低20分贝的速度(-20dB/dec) 变化的直线。 积分环节的相频特性是:
考研复习题典型环节伯德图
相频特性是:
二阶微分环节与振荡节 的Bode图关于ω轴对称 ,如图5-21。渐近线的 转折频率为,相角变化 范围是00至+1800。 二阶微分环节的Bode图
七不稳定环节
不稳定环节的频率特性是:
其对数幅频特性和相频特性分别为:
不稳定惯性环节的Bode图
二积分环节
积分环节的频率特性是: 其幅频特性为: 对数幅频特性是:
设
,则有: (5-68)
可见,其对数幅频特性是一条 在ω=1(弧度/秒)处穿过零分贝 线(ω轴),且以每增加十倍频率 降低20分贝的速度(-20dB/dec) 变化的直线。 积分环节的相频特性是:
(5-69)
是一条与ω无关,值为-900 且平行于ω轴的直线。积分环 节的对数幅频特性和相频特性 如图5-12所示。
振荡环节的相频特性是:
除上面三种特殊情况外,振荡环节相频特性还是 阻尼比ξ的函数,随阻尼比ξ变化,相频特性在转折 频率 附近的变化速率也发生变化,阻尼比ξ越小, 变化速率越大,反之愈小。但这种变化不影响整个相 频特性的大致形状。不同阻尼比ξ的相频特性如图520 所示。
振荡环节对数相频特性图
六二阶微分环节
一放大环节(比例环节)
放大环节的频率特性为:
其幅频特性是:
对数幅频特性为:
放大环节的对数幅频特性如图5-11所示,它是一条与角 频率ω无关且平行于横轴的直线,其纵坐标为20lgK。 当有n个放大环节串联时,即:
(5-62)
幅值的总分贝数为:
(5-63)
放大环节的相频特性是:
(5-64)
如图5-11所示,它是一条与角频率ω无 关且与ω轴重合的直线。
如何绘制伯德图.ppt
j?
??
其幅频特性为
1
G ( j? ) ? ?
对数幅频特性是
(5-65) (5-66)
1
20 lg G ( j? ) ? 20 lg ? ? 20 lg ? ?
(5-67)
当 ? ? 0 . 1 时,20 lg G ( j 0 . 1 ) ? ? 20 lg 0 . 1 ? 20 ( dB ) ; 当 ? ? 1 时,20 lg G ( j1) ? ? 20 lg 1 ? 0 ( dB ) ;
当 ? ? 10 时,20 lg G ( j10 ) ? ? 20 lg 10 ? ? 20 ( dB ) 。
6
设 ? ' ? 10 ? ,则有
? 20 lg ? ' ? ? 20 lg 10 ? ? ? 20 ? 20 lg ?
可见,其对数幅频特性是一条 在
dB L(? )
60
(5-68)
ω =1(弧度/秒)处穿过零分贝线
(5-73) (5-74)
? ? 20 lg 1 ? T 2? 2
当 ? ?? 1 时, 20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? 0 ( dB ) ,
T
当 ? ?? 1 时,20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? ? 20 lg T ? ( dB )
40
(ω 轴),且以每增加十倍频降
20
? 20 dB / dec
低20分贝的速度( -20dB/dec )
0
0.01
0.1
1
10
?
变化的直线。
? 20
积分环节的相频特性是
? G ( j ? ) ? ? 90 0
自动控制原理题目(含答案)
《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量和反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统和程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 和外作用及初始条件无关。
7、两个传递函数分别为G1(s)和G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H(s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、使用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T 愈大则系统的快速性愈差。
18、使用频域分析法,穿越频率越大,则对应时域指标t s 越小,即快速性越好19最小相位系统是指S 右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、 补偿校正和复合校正四种。
应用Matlab绘制Bode图及Nyquist图
解答:
1、做传递函数为 G (s ) 解:
24 (0.25s 0.5) 的系统的 Bode 图。 (P148 例 6) 5s 20.05s 2
2、 已知系统的开环传递函数为 G ( s )
100k ,用 Matk=1,8,20 时系统 Nyquist 图,并判断系统的稳定性。试分析 k 对系统稳定 性的影响。 解: (1)当 K=1 时,由题意得 P=0,由 Bode 图得 N=0,则 Z=N+P=0,系统稳 定。
应用 Matlab 绘制 Bode 图及 Nyquist 图
题目:
1、自己从教材上的例题或者课后作业中选择一个系统,绘制其 Bode 图。 2、 已知系统的开环传递函数为 G ( s )
100k ,用 Matlab 分别 s ( s 5)(s 10)
绘制 k=1,8,20 时系统 Nyquist 图,并判断系统的稳定性。试分析 k 对系统稳定性 的影响。
(2) 当 K=8 时,由题意得 P=0,由 Bode 图得 N=2,则 Z=N+P=2,系统不稳 定。
(3)当 K=20 时,由题意得 P=0,由 Bode 图得 N=2,则 Z=N+P=2,系统 不稳定。
开环伯德图绘制
ν
75
《自动控制原理》电子教案
(5)绘制中频段 首先在横坐标轴上将转折频率按从低到高的顺序标出各转折频率。然后,依次在各转折频率处改变 直线的斜率 ,改变的多少取决于转折处环节的性质,如惯性环节的斜率为 − 20dB dec ,振荡环节为
− 40dB dec ,一阶微分环节为 + 20dB dec ,二阶微分环节为 + 40dB dec 等等。 例:已知单位反馈控制系统的开环传递函数为 GK ( s) = 100( s + 2) s( s + 1)(s + 20) ,试绘制其开环
ω
2
由图可知: 解得wc=4,
小结丗对最小相位系统、幅频特性与相频特性的关系
如果幅频特性的斜率为-1对应的相角为-pi/2; 如果幅频特性的斜率为-k对应的相角为-pi*k/2.
77
L(ω ) = 20 lg K − 20 ×ν × lg ω ω =1 = 20 lg K
③低频段直线(或其延长线)与零分贝线(横轴)的交点频率为 ω0 = K ,对于 I 型系统交点频
ν
1
率为 ω0 = K ,II 型系统交点频率为 ω0 =
1
K ;这是因为由低频段的幅频方程,可得到
L(ω ) = 20 lg K − 20 ×ν × lg ω = 0 ⇒ 20 lg K = 20 ×ν × lg ω = 20 lg ων
⎧ L (ω ) = −20 lg 1 + ω 2 − 20 lg lg 1 + 4ω 2 ⎧ϕ (ω ) = arctgω − arctg 2ω ⎪ 1 1 ,⎨ ⎨ 2 2 ⎩ϕ 2 (ω ) = −arctgω − arctg 2ω ⎪ L2 (ω ) = −20 lg 1 + ω − 20 lg lg 1 + 4ω ⎩
自动控制原理题目(含答案)
《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量与反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。
7、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H(s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T 愈大则系统的快速性愈差。
18、应用频域分析法,穿越频率越大,则对应时域指标t s 越小,即快速性越好19最小相位系统是指S 右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、 补偿校正与复合校正四种。
波德(Bode)图
2 2
低频段( << n)
L( ) 20lg1 0
即低频渐近线为0dB的水平线。 高频段( >> n)
2 L( ) 20lg 1 2 n n 2 2
20 lg 40 lg 40 lg 40 lg n n n
3
通常用L()简记对数幅频特性,也称L() 为增益;用()简记对数相频特性。
对数坐标的优点
幅值相乘、相除,变为相加,相减,简化作图; 对数坐标拓宽了图形所能表示的频率范围 两个系统或环节的频率特性互为倒数时,其对数 幅频特性曲线关于零分贝线对称,相频特性曲线关 于零度线对称
11
20 10
Bode Diagram
= 0.1 = 0.2 = 0.3 = 0.5
L()/ (dB)
0
-10 -20
-30 -40 0
渐近线
= 0.7 = 1.0
-40dB/dec
() / (deg)
-45
-90 -135 -180 0.1
= 0.1 = 0.2 = 0.3
即低频段可近似为0dB的水平线,称为低频渐近线。 高频段( >> 1/T )
L( ) 20lg 1 T 2 2 20lg T 20lg T 20lg
即高频段可近似为斜率为-20dB/dec 的直线,称 为高频渐近线。
7
L()/ (dB)
10 0
10
Bode Diagram 渐近线 -20dB/dec
j 1 i 1 n m
(3)依次作出各环节的Bode图(渐进线); (4)将各环节曲线合成; (5)将对数幅频特性曲线竖直移动20lgKdB.