单像空间后方交会共17页文档
第五讲 单片空间后方交会
x12 − f (1 + 2 ) f xy − 1 1 f
2 x2 − f (1 + 2 ) f
−
x1 y1 f
y12 − f (1 + 2 ) f − x2 y2 f
x y − 2 2 f
2 x3 − f (1 + 2 ) f
2 y2 − f (1 + 2 ) f
−
x3 y3 f
xy − 3 3 f
Y B
A
C X
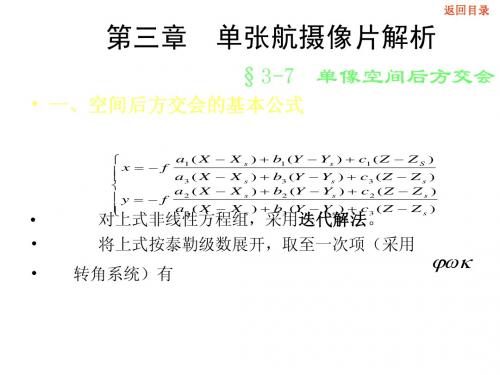
利用航摄像片上三个以上像点坐标和对应像 点坐标和对应地面点坐标,计算像片外方位元 素的工作,称为单张像片的空间后方交会。 进行空间后方交会运算,常用的一个基本公 式是前面提到的共线方程。式中的未知数,是 六个外方位元素。由于一个已知点可列出两个 方程式,如有三个不在一条直线上的已知点, 就可列出六个独立的方程式,解求六个外方位 元素。由于共线条件方程的严密关系式是非线 性函数,不便于计算机迭代计算。为此,要由 严密公式推导出一次项近似公式,即变为线性 函数。
(5) 用所取未知数的初始值和控制点的地面坐标,代入共线方程式,逐 ) 用所取未知数的初始值和控制点的地面坐标,代入共线方程式, 点计算像点坐标的近似值 ( x), ( y ) 并计算 lx , l y a ( X − X S ) + b1 (Y − YS ) + c1 ( Z − Z S ) x=−f 1 a3 ( X − X S ) + b3 (Y − YS ) + c3 ( Z − Z S ) a ( X − X S ) + b2 (Y − YS ) + c2 ( Z − Z S ) y=−f 2 a3 ( X − X S ) + b3 (Y − YS ) + c3 ( Z − Z S ) (6) 组成误差方程式。 ) 组成误差方程式。 7) 计算法方程式的系数矩阵与常数项,组成法方程式。 (7) 计算法方程式的系数矩阵与常数项,组成法方程式。 (8) 解算法方程,迭代求得未知数的改正数。 ) 解算法方程,迭代求得未知数的改正数。
单像空间后方交会
像空间辅助坐标系(u,v,w)
坐标原点位于S,但坐标轴不一定与像平 面坐标轴平行,按需要定义。
像空坐标系与像空辅助坐标系之关系
物方坐标系
地面测量坐标系(Xt,Yt,Zt)
义。
地面摄影测量坐标系(X,Y,Z,)
原点位于地面某一已知点,坐标轴按需要定
地面测量坐标系与摄影测量坐标系之关系
确定像片相对S 的位置。 --焦距 --像主点 在像平面坐标系中 的坐标 例
外方位元素
1、确定S在物方空 间坐标系中位置的元 素(直线元素)。 Xs,Ys,Zs 例 Xs=1140.2m Ys=2003.5m Zs=1035.7m
பைடு நூலகம்2、确定像片在
物方空间坐标系中 位置的元素(角 元素)。 1) 角元素
像方坐标系与物方 坐标系之关系
共线方程线性化:
前式具体化:
即有
'
2
'
2
(5-9a)具体化:
写成
即
综合上述推导,有共线方程的线性形式:
式中
二.解算中的具体公式
利用(a)式解求外方位元素时,有6个未知数,须用像 片及地面3个点的3对已知的(X,Y,Z)、(x,y)组6个 方程.实用中为提高精度常取多余点多余观测,为此要按 最小二乘平差计算.则平差算式如下:
分)
单像空间后方交会(第五章部
根据单张航测像片上一定数量的已 知点(像片坐标和地面坐标已知),计算该 像片的外方位元素(摄影中心S的坐标 Xs,Ys,Zs,像片的角元素 ).
知道外方位 元素,可用来恢 复像片在摄影时 的空间位置,重 建像片与被摄地 面之间的相互关 系
内方位元素
( X1 , Y1 , Z1 )
单像空间后方交会

Xs0,Ys0,Zs0, 0,ω0,κ0为未知数的初始近似
值
(x),(y)为未知数的近似值代入共线条件方程
求出的像点坐标值
第五章 影像解析基础 3、单像空间后方交会误差方程与法方程
根据间接平差的误差方程形式,按泰勒公式展开后 的误差方程为: vx(x )
y y y y y y vy y) -y △ Xs △Ys △Zs △f △w △k ( Xs Ys Zs f w k -x x x x x x x △Ys △f △w △k △ Xs △Zs Xs Ys Zs f w k
X ,Y , Z
x f f y
X Z Y Z
关键推求 X , Y , Z 对角元素的偏导数
X X XS T R T T Y Rk Rw Y YS Z Z ZS
T
X T Rw Rk Rw Rk Y w Z
T
0 0 sin k
0 0 cosk
sin k X cosk Y 0 Z
第五章 影像解析基础
X X XS T Rk T T Rw R Y YS Y k k Z Z Z S X X XS T Rk Rk T T T ( Rk Rk ) Rw R Y YS Rk Y k Z Z Z k S Y X 0
A •计算: T PA •计算: T PL A A •答解法方程: T PAX APL •计算外方位元素的改正数:
dX S , dYS , dZS , d , dw , dk
摄影测量学教案(第10讲后方交会).doc
三、概述
1、 单像空间后方交会 利用地面控制点及其在像片上的像点,确定一张像片外方位元素的方法。 2、单像空间后方交会的基本方法 a. 角锥体法
S
c a b
角锥体法介绍大 体思路
b. 利用共线条件方程解算像片的外方位元素
x f y f
a1 ( X X S ) b1 ( Y YS ) c1 ( Z Z S ) a3 ( X X S ) b3 ( Y YS ) c3 ( Z Z S ) a2 ( X X S ) b2 ( Y YS ) c2 ( Z Z S ) a3 ( X X S ) b3 ( Y YS ) c3 ( Z Z S )
a1 ( X X S ) b1 ( Y YS ) c1 ( Z Z S ) a3 ( X X S ) b3 ( Y YS ) c3 ( Z Z S ) a2 ( X X S ) b2 ( Y YS ) c2 ( Z Z S ) a3 ( X X S ) b3 ( Y YS ) c3 ( Z Z S )
lx x x计
ly y y计
(7)
而 Z 和 x计 , y 计 分别按如下方法计算:
X a1 Y b1 c1 Z
五上、数字摄影测量学单片空间后方交会

总误差方程
法方程
V Ax L
x (AT A) 1 (AT L)
X s Ys V1 A1 l1 Z V2 A2 l2 s V , A , L , x , Vn An ln T T li xi ( xi ) yi ( yi ) , Vi v xi v yi a11 a12 a13 a14 a15 a16 Ai a21 a22 a23 a24 a25 a26
已知点必须多余点, 数据处理方法采用 最小二乘法!
这是所有测量的一个统一的基本原则! 摄影测量也不例外。
二、误差方程与法方程
已知值 x0 , y0 , f ,m, X, Y, Z 观测值 x , y 相应改正数 vx,vy 未知数 Xs, Ys, Zs, , , 泰勒级数展开
四、空间后方交会的精度
求解各未知数的精度可以通过法方程系数矩阵 求逆的方法,解出相应的权倒数 Qii
mi m0 Qii 按下式计算第i未知数的中误差:
式中,m0为单位权中误差,计算公式 为: m [VV ] 0 2n 6 ,其中n为控制点的点数。
空间后方交会用到的已知点越多,空间后方交会 的精度越高,此外空点的分布也空间后方交会计算 的精度。空间后方交会使用的控制点应当避免位于 一个圆柱面上,否则,会出现解不唯一的情况。
偏导数 1
x f X Z 2 ( Z X) X s Z X s X s f 2 ( a1Z a3 X ) Z 1 X (a1 f f a3 ) Z Z 1 (a1 f a3 x) Z
偏导数 2
x f X Z 2 ( Z X) Z
单像空间后方交会
(x)、(y)——函数x、y在展开点(未知数近 似值处)的近似值; ——外方位元素(未知数)的改正数。 dX s ......, dκ
返回目录
第三章 单张航摄像片解析
§3-7 单像空间后方交会
• • • • • 每次迭代计算过程中,给定未知数(即外 方位元 素)的近似值后,即可计算得到展开式中未知数的 dX s ......, dκ 偏导系数值,从而组成线性方程组解算 。 偏导系数表达示例: X x = − f Z 设
V = ∂y dX + ∂y dY + ∂y dZ + ∂y dφ + ∂y dω + ∂y dκ −[ y − ( y)] •y s s s ∂Xs ∂Ys ∂Zs ∂φ ∂ω ∂κ
返回目录
第三章 单张航摄像片解析
§3-7 单像空间后方交会
• 也可写成(设有n个控制点) + d dφ + e dω + f dκ −l Vx1 = a11dXs + b11dYs + c11dZs 11 11§3-7 单像空间后方交会
• 一、空间后方交会的基本公式 空间后方交会的基本公式 后方交会
x = − f y = − f a1 ( X − X s ) + b (Y − Ys ) + c1 (Z − ZS ) 1 a3 ( X − X s ) + b3 (Y − Ys ) + c3 (Z − Zs ) a2 ( X − X s ) + b2 (Y − Ys ) + c2 (Z − Zs ) a3 ( X − X s ) + b3 (Y − Ys ) + c3 (Z − Zs )
y = − f Y Z
单像空间后方交会原理
单像空间后方交会原理你知道单像空间后方交会吗?这可是摄影测量里一个超有趣的概念呢!咱们先来说说啥是单像空间后方交会。
想象一下,你拿着相机拍了一张照片,这张照片里有好多好多的景物。
那单像空间后方交会呢,就是通过这一张照片里的信息,去算出拍摄这张照片的时候,相机在空间里的位置和姿态。
比如说,照片里有一座山,还有一条河,还有几棵大树。
那咱们怎么通过这些东西来知道相机当时在哪,朝哪个方向呢?这就用到单像空间后方交会啦!这当中有几个关键的东西哦。
一个是控制点,就好像是我们的“小帮手”。
这些控制点是我们事先知道它们在空间里准确位置的点。
比如说,有个特别明显的大石头,我们知道它在地球上的坐标是多少。
然后呢,还有像片的内方位元素。
这就像是相机的“小秘密”,比如说相机的焦距啦等等。
那怎么通过这些来算出相机的位置和姿态呢?这就像是一个解谜的过程!咱们得先把照片上控制点的像点坐标找出来,这就像是在照片里给这些控制点“定位”。
然后呢,根据一些数学公式和算法,把这些坐标啊、内方位元素啊、控制点的空间坐标啊等等都放到一起,就像是把一堆拼图的碎片拼起来。
这个过程可不容易哦,得算好多好多的数学式子。
但是别担心,咱们聪明的科学家们早就想出了办法,有各种软件和工具能帮咱们完成这些复杂的计算。
你可能会想,这有啥用啊?用处可大啦!比如说,我们要做地图,要对一个地方进行测量,单像空间后方交会就能帮我们得到相机的位置和姿态,这样就能更准确地知道照片里的东西在实际空间里的位置啦。
而且哦,现在科技越来越发达,单像空间后方交会的精度也越来越高。
这就像是我们的眼睛越来越厉害,能看得更清楚,更准确!想象一下,如果没有单像空间后方交会,那我们看到的照片就只是一张好看的图片,没办法知道那么多背后的信息。
但是有了它,一张照片就像是一个装满了秘密的宝盒,我们可以一点点地解开,发现更多有趣的东西。
怎么样,是不是觉得单像空间后方交会很神奇很有趣呀?希望我讲得能让你明白这个有点复杂但又超级酷的原理!。
(完整word版)单像空间后方交会程序报告
单像空间后方交会程序报告指导老师:刘老师班级:测绘 101姓名:尚锋学号:19号1、应用程序的主进口部分的代码:using System;using System.Collections.Generic;using System.Linq;using System.Windows.Forms;namespace 单像空间后方交会{static class Program{///<summary>///应用程序的主进口点。
///</summary>[ STAThread]static void Main(){Application .EnableVisualStyles();Application .SetCompatibleTextRenderingDefault( false );Application .Run( new Form1());}}}2、方法解算类(通用)部分的代码:using System;using System.Collections.Generic;using System.Linq;using System.Text;namespace 单像空间后方交会{class Tongyong{struct image_point // 一个像点结构,包括像点坐标和地面点坐标{public double x;public double y;public double X;public double Y;public double Z; }private private private private private private private private private private private private private publicdouble f;// 主距double u;//u 为外方向元素,下边 5个同样double w;double k;double Xs;double Ys;double Zs;image_point [] p = new image_point [4];// 四个控制点double [] R = new double [9]; // 旋转矩阵double [] a = new double [8];// 像点坐标近似值double [,] A =new double [8, 6];// 偏差方程式系数double [] L = new double [8];// 偏差方程式常数项int count = 0;// 统计代次数Tongyong( double g, double [] q)// 结构函数,初始化各变量 , 单位 m{f = g;for ( int i = 0; i < 4; i++){int j = i * 5;p[i].x = q[j];p[i].y = q[j + 1];p[i].X = q[j + 2];p[i].Y = q[j + 3];p[i].Z = q[j + 4];}double ave = 0, sum = 0;for ( int i = 0; i < 3; i++)// 求比率尺分母{for ( int j = i + 1; j < 4; j++){sum += Math.Pow(p[i].Y - p[j].Y, 2)) / + Math.Pow(p[i].y - p[j].y, 2));} Math.Sqrt(Math.Pow(p[i].X - p[j].X, 2) + Math.Sqrt( Math.Pow(p[i].x - p[j].x, 2)}ave = sum / 6;u = 0;// 给定外方向元素的初始值w = 0;k = 0;Xs = (p[0].X + p[1].X + p[2].X + p[3].X) / 4; , 角度均设置为0//Xs 为四个控制点 X的均匀值,Ys近似Ys = (p[0].Y + p[1].Y + p[2].Y + p[3].Y) / 4;Zs = (p[0].Z + p[1].Z + p[2].Z + p[3].Z) / 4 + ave * f;}private double sin( double m) // 正弦,为简化而写 , 下同{return Math.Sin(m);}private double cos( double m){return Math.Cos(m);}private void calcos()// 计算旋转矩阵{R[0] = cos(u) * cos(k) - sin(u) * sin(w) * sin(k);R[1] = -cos(u) * sin(k) - sin(u) * sin(w) * cos(k);R[2] = -sin(u) * cos(w);R[3] = cos(w) * sin(k);R[4] = cos(w) * cos(k);R[5] = -sin(w);R[6] = sin(u) * cos(k) + cos(u) * sin(w) * sin(k);R[7] = cos(u) * sin(w) * cos(k) - sin(u) * sin(k);R[8] = cos(u) * cos(w);}private void calabout() // 像点坐标的近似值{int i;for (i = 0; i < 4; i++){a[2 * i] = -f * (R[0] * (p[i].X - Xs) + R[3] * (p[i].Y-Ys) + R[6] * (p[i].Z - Zs)) / (R[2] * (p[i].X - Xs) + R[5] * (p[i].Y-Ys) + R[8] * (p[i].Z - Zs));a[2* i + 1] = -f * (R[1] * (p[i].X - Xs) + R[4] * (p[i].Y -Ys) + R[7] * (p[i].Z - Zs)) / (R[2] * (p[i].X - Xs) + R[5] * (p[i].Y-Ys) + R[8] * (p[i].Z - Zs));}}private void calxx() // 偏差方程式的系数和常数项{int for i;(i = 0; i < 4; i++) // 系数{double z = R[2] * (p[i].X - Xs) + R[5] * (p[i].Y - Ys) + R[8] * (p[i].Z - Zs);int n = i * 2;A[n, 0] = (R[0] * f + R[2] * p[i].x) / z;A[n, 1] = (R[3] * f + R[5] * p[i].x) / z;A[n, 2] = (R[6] * f + R[8] * p[i].x) / z;A[n, 3] = p[i].y * sin(w) - f * cos(w) * cos(k) - p[i].x/f * (p[i].x * cos(w) * cos(k) - p[i].y * cos(w) * sin(k)); A[n,4] = -f * sin(k) - p[i].x / f * (p[i].x * sin(k) +p[i].y * cos(k));A[n, 5] = p[i].y;A[n + 1, 0] = (R[1] * f + R[2] * p[i].y) / z;A[n + 1, 1] = (R[4] * f + R[5] * p[i].y) / z;A[n + 1, 2] = (R[7] * f + R[8] * p[i].y) / z;A[n + 1, 3] = -p[i].x * sin(w) + f * cos(w) * sin(k) -p[i].x / f * (p[i].x * cos(w) * cos(k) - p[i].y * sin(k) * cos(w));A[n + 1, 4] = -f * cos(k) - p[i].y / f * (p[i].x * sin(k) + p[i].y * cos(k));A[n + 1, 5] = -p[i].x;}for (i = 0; i < 4; i++)// 常数项{L[2 * i] = p[i].x - a[2 * i];L[2 * i + 1] = p[i].y - a[2 * i + 1];}}private double calAdd(){double [,] temp =new double [6, 6];//A 的转置与 A相乘的积double [,] ANew = new double [6, 8];//A 的转置double [] t =new double [6];//A 的转置与 L相乘的积double [] X = new double [6];// 更正数int i, j, n;for (i = 0; i < 8; i++)// 求A的转置 ANew{for (j = 0; j < 6; j++){ANew[j, i] = A[i, j];}}for (i = 0; i < 6; i++)// 求A的转置与 A相乘的积 temp {for (j = 0; j < 6; j++){temp[i, j] = 0;for (n = 0; n < 8; n++){temp[i, j] += ANew[i, n] * A[n, j];}}}MATINV(temp);//temp for (i = 0; i < 6; i++) 的逆,保留在自己矩阵中// 求A的转置与 L的乘积 t{t[i] = 0;for (j = 0; j < 8; j++){t[i] += ANew[i, j] * L[j];}}for (i = 0; i < 6; i++)// 求更正数 X{X[i] = 0;for (j = 0; j < 6; j++){X[i] += temp[i, j] * t[j];}}Xs += X[0];// 外方向元素初始值加上更正数Ys += X[1];Zs += X[2];u += X[3];w += X[4];k += X[5];return maxone(X);// 返回判断条件 , 最大的更正数的值}public void makeSure() // 计算流程控制函数{calcos();calabout();calxx();double VALUE = calAdd();count++;while (VALUE > 0.00001)// 迭代至最大更正数为止{calcos();calabout();calxx();VALUE = calAdd();count++;}}private void MATINV(double [,] c) // 求6阶矩阵的逆{int i, j, h, m;const int n = 6;double l;double [,] q = new double [n, 12];for (i = 0; i < n; i++) // 结构高斯矩阵{for (j = 0; j < n; j++){q[i, j] = c[i, j];}}for (i = 0; i < n; i++) // 单位矩阵{{for (j = n; j < 12; j++)if (i + 6 == j)q[i, j] = 1;elseq[i, j] = 0;}}for (h = 0, m = 0; m < n - 1; m++, h++)// 消去对角线以下的数据{for (i = m + 1; i < n; i++){if(q[i, h] == 0d)continue ;l = q[m, h] / q[i, h];for (j = 0; j < 12; j++){q[i, j] *= l;q[i, j] -= q[m, j];}}}for (h = n - 1, m = n - 1; m > 0; m--, h--)//消去对角线以上的数据{for (i = m - 1; i >= 0; i--){if(q[i, h] == 0d)continue ;l = q[m, h] / q[i, h];for (j = 0; j < 12; j++){q[i, j] *= l;q[i, j] -= q[m, j];}}}for (i = 0; i < n; i++)// 将对角线上数据化为 1{l = 1.0 / q[i, i];for (j = 0; j < 12; j++){q[i, j] *= l;}}for (i = 0; i < n; i++)// 提取逆矩阵{for (j = 0; j < n; j++){c[i, j] = q[i, j + 6];}}}private double maxone(double [] Arr)// 返回六个元素中的最大值{double [] ARR =new double [6];for ( int i = 0; i < 6; i++){ARR[i] = Arr[i];if (ARR[i] < 0d)// 取正ARR[i] = -ARR[i];}Array .Sort(ARR, 0, 6);return ARR[5];}public int COUNT{get{return count;}}public double U {get{return u;}}public double W {get{return w;}}public double K {get{return k;}}public double XS {get{return Xs;}}public double YS {get{return Ys;}}public double ZS {get{return Zs;}}}3、窗体一部分的代码:using System;using System.Collections.Generic;using ponentModel;using System.Data;using System.Drawing;using System.Linq;using System.Text;using System.Windows.Forms;using System.Diagnostics;using System.Data.OleDb;using System.IO;namespace 单像空间后方交会{public partial class Form1 : Form {private private double [] data= double f = 0;new double [20];// 主距// 保留表中的数据public Form1(){InitializeComponent();}private void Form1_Load( object sender, EventArgs e) {//TODO: 这行代码将数据加载到表“ database1DataSet1.data ”中。
后方交会实验文档
单向空间后方交会实验报告潘志富20152211081300081.实验目的以单幅影像为基础,从该影像所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,解求该影像在航空摄影时刻的六个外方位元素,确定被摄物体与航摄影像的关系。
2.实验数据摄影机主距f=153.24mm,x0=0.01mm,y0=0.02mm, 像片比例尺为1:40000,有四对点的像点坐标与相应的地面坐标如下表。
3. 算法流程(1)获取已知数据。
从航摄资料中差取平均航高与摄影机主距;获取控制点的地面测量坐标并转换为地面摄影坐标。
(2)量测控制点的像点坐标并作系统误差改正。
(3)确定未知数的初始值。
在竖直摄影且地面控制点大体对称分布的情况下,按如下方法确定初始值,即n X X S ∑=0,n Y Y S ∑=0,∑+=Z nmf Z S 100000===κωϕ(4)用三个角元素的初始值按下式,计算各个方向余弦值,组成旋转矩阵R ωϕκωϕκϕκωϕκϕωκωκωωϕκωϕκϕκωϕκϕcos cos cos sin cos sin sin sin sin cos cos sin sin cos cos sin cos cos sin cos sin sin sin cos sin sin sin cos cos 321321321=+-=+=-===-=--=-=c c c b b b a a a(5)逐点计算像点坐标的近似值。
利用未知数的近似值和控制点的地面坐标;带入共线方程式,逐点近似像点坐标的近似值(x )、(y )。
(6)逐点计算误差方程式的系数和常数项,组成误差方程式。
(7)计算法方程的系数矩阵A A T 和常数项L A L ,组成法方程式。
(8) 解法方程,求得外方位元素的改正数κωϕd d d d d d 、、、、、S S S Z Y X 。
(9)用前次迭代取得的近似值,加本次迭代的改正数,计算外方位元素的新值。
单片空间后方交会16页PPT
《摄影测量学》(上)第四章
单片空间后方交会
武汉大学
遥感信息工程学院 摄影测量教研室
主要内容
一、定义 二、误差方程和法方程 三、计算过程
一、定义
z y
x s(Xs, Ys, Zs)
Z a
bc
Y
A
C
B
根据影像覆盖范 围内一定数量的 分布合理的地面 控制点(已知其 像点和地面点的 坐标),利用共 线条件方程求解 像片外方位元素
共线条件方程
xx0
f
a1(XXs)b1(YYs)c1(ZZs) f a3(XXs)b3(YYs)c3(ZZs)
X Z
yy0f
a2(XXs)b2(YYs)c2(ZZs)f a3(XXs)b3(YYs)c3(ZZs)
Y Z
Y Z Xa a a1 3 2
b1 b2 b3
c1XXs XXs c c3 2Z Y Y ZssR1Z Y Y Zss
f H
sin
a 12
f H
cos
a 13
y y0 H
a 14
(x
x 0 )( y f
y0 )
cos
(f
(y
y0)2 f
) sin
a 15
(
f
(y
y 0 ) 2 ) cos f
(x
x 0 )( y f
y 0 ) sin
a16 ( x x 0 )
外方位元素的计算
当一张像片上至少有三个控制点时,误差方程矩阵形式
偏导数 1
x
f X
Z
( Z X)
X s
Z 2 X s
X s
f Z2
( a1Z
a3X