北航理论力学
北航理论力学 动力学5C
x
qT [x, ] qT [x,]
T 1 qT Mq
M mm21Lcoms2
m2
4 3
L cos
m2 L2
2
M是正定对称矩阵,是广义坐标的函数 14
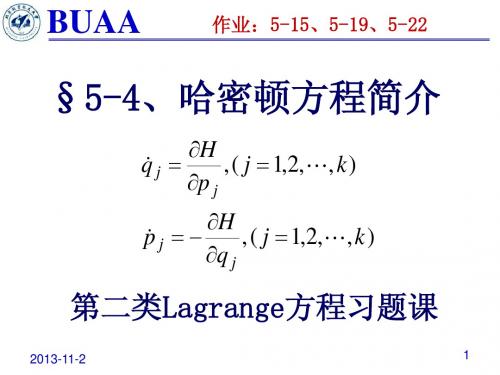
§5-4、哈密顿方程
T 1 qT Mq 2
pj
T q j
,
( j 1,2)
p
T q
p Mq
系统的哈密顿函数H=T+V
H
T
V
1 2
对于定常约束的保守系统,哈密顿函数H就是系统的动能与
势能的和,即:
H T V
12
§5-4、哈密顿方程
例题:求自由质点在重力场中的哈密顿函数和哈密顿方程
z
1、系统的广义坐标:x, y, z
2、系统的动能 T 1 m(x2 y 2 z2 )
mg
y
2
pj
T q j
,
( j 1,2,3)
px mx py my pz mz
21
哈密顿系统的辛算法
20世纪80 年代,提出了 哈密顿系统的 辛算法。该算 法可保持长期 数值计算的稳 定性。
冯 康(1920.9~1993.8) 数学与物理学家、计 算数学家。1944年毕业于重庆中央大学物理 系。1951~1953年赴前苏联进修。
曾任中国数学会理事,计算数学分会副 理事长,中国计算机学会副主任等职。 1980 年被选为中国科学院学部委员(数学物理学部 院士)。
v1 ? v2 ? ?
10
§5-4、哈密顿方程
一、保守系统的拉格朗日方程 设:L=T-V (拉格朗日函数)
d dt
L q j
L q j
0,
( j 1,2,, k)
北航理论力学-动力学2D

n
M
O
(Fi
( e)
)
rOC
(maO
)
i 1
2mL2 kh tan
h
2mL2 kh tan 0
0
kh 2mL2
FI
2mL2 kh 0
(B)
mg
Asin(0t )
17
§2-2、动量矩定理
问题:滑块置于斜面上,如何确定约束力合力作用线的位置。
C
mg
A: 斜面有摩擦, 滑块处于平衡
C
mg
)
i 1
rAC (maA )
z
4
§2-2、动量矩定理
例:均质杆AB悬挂在加速上升的电梯上,求杆的运动微分方程
解:取杆为研究对象,受力分析与运动分析
FAx FAy
A
FI
C
aA mg
B
AB L
dLrA
dt
n
M
A
(F (e) i
)
i 1
rAC (maA )
z
杆相对A轴的动量矩 外力对A轴之矩 惯性力对A轴之矩
(maA )
xA
m2L 2 sin
m1 m2
9
§2-2、动量矩定理
y FAy
A
o
FAx
3、研究AB杆和小球B,受力分析
4、应用相对动轴A的动量矩定理
x
dLrA
dt
n
M A (Fi(e) ) i 1
rAC (maA )
A
M
杆相对A轴的动量矩
LrA m2L2
B m2xA 外力对A轴之矩
LrA
1 mL2
3
MA
1 2
mgL sin
北航理论力学部分课件

§1-3 平衡问题的解法
•自由体 free body :可以在空间任意运动的物体
•非自由体 constrained body :运动受到某些限制的物体
13.10.2023
1
理论力学
非自由体实例
13.10.2023
2
理论力学
§1-3 平衡问题的解法
一、约束与约束力
•约 束 constraint :限制物体运动的条件, •约束体 constraint body :约束非自由体运动的物体,
§1-3 平衡问题的解法
思考题: • 机器人的哪些关节 是柱链接铰 •人手的哪些关节可 简化成柱链接铰
13.10.2023
23
理论力学
§1-3 平衡问题的解法
米开朗基罗: 石头本身就赋予雕像以生命,我只是把多余的部分敲掉了
哀 悼 基 督 ( 米 开 朗 基 罗
人 体 关 节 的 简 化 模 型
)
科学研究: 客观规律存在于自然界中,在研究问题的过程中,我们要抓住
9
理论力学
§1-3 平衡问题的解法
北京南站顶棚拱架支座
13.10.2023
10
理论力学
2、连接铰链
§1-3 平衡问题的解法
B
注意:作用力与反作用力的关系
13.10.2023
F By F Bx
B
F
' By
B
F
' Bx
11
理论力学
§1-3 平衡问题的解法
13.10.2023
12
理论力学
3、活动铰链支座
例:结构如图所示,不计构件自重,画出AB杆的受力图,
AC
B
北航理论力学第一学期总复习静力学ppt课件
空间任意力系简化及其平衡条件 F , F , , F }{, F M } 对于刚体: { 1 2 n R O
•主矢
•主矩
FR Fi Fi '
M O M i ri Fi
i 1 i 1
n
n
i 1 n
i 1
n
简化的最终结果:① 平衡;②合力;③合 力偶;④力螺旋
B C
L L L
(1)
(2)
C
16
平面桁架内力的计算方法
平面桁架的特点:桁架中的每个杆件均为二力构件或二力杆 1、节点法:以节点为研究对象计算杆件内力的方法 节点法的特点:1、研究对象为节点(汇交力系) 2、每个节点可以建立两个独立的平衡方程 2、截面法:以部分桁架为研究对象计算杆件内力的方法 1
两个力系等效条件:
两个力系的主矢相等、主矩也相等
平衡条件
F 0 ,M 0 R O
二力平衡条件,三力平衡定理,加减平衡力系,力偶性质
二力平衡原理 作用于刚体上的二力为平衡力系的充分必要条件是此 二力等值、反向、共线。
三力平衡定理 作用于刚体上的三个力若为平衡力系,则这三个力共 面;或汇交于一点,或平行。 力偶的等效条件和性质 •两个力偶等效的条件是它们的力偶矩相等 性质一 力偶不能与一个力等效 { F , F ' } { F } R 性质二 力偶可在其作用面内任意移动(或移到另一平行平面), 而不改变对刚体的作用效应 性质三 只要力偶矩矢量的方向和大小不变(F,d 可变), 3 则力偶对刚体的作用效应就不变。
2018/11/15 19
题23:作业习题分析:已知P,M,D,求平衡时的摩擦系数 平衡条件
北航理论力学总结

A
2M
D
b
B
b
b
b
C
18
2. 如图所示, 均质杆BC的C端靠在粗糙墙面上, B端用等长的绳索AB 拉住. 绳AB与杆BC的夹角为2θ, 若系统在铅垂面内保持平衡, 求C 处摩擦因数的最小值 f min .
答:
f min
=___________________
A
f min tan
2
B
C
19
用一水平冲量I . 若取OC与铅垂线夹角θ为广义坐标, 试给出该刚
体的运动微分方程和初始条件. O
答: 运动微分方程为:_______________
g
l
I
初始条件为:___________________
C
30
5. 边长为L的正方形板ABCD在图示平面内作平面运动, 某瞬时顶
点A的加速度为 a A (方向如图所示), 板的角速度为 , 角加速 度为 . 求此时顶点D的加速度 aD 的大小.
Ff
O
B
10
4.
若质点所受的合力始终指向某一固定点,则该点 BCD 。 可能作_______ 若质点的加速度始终垂直于速度(均不为零),则该 AB C。 点可能作_______ 若质点所受的合力始终垂直于速度(均不为零),则 ABC。 该点可能作_______
4. 4.
A:
B: C: D:
空间曲线运动
8
3. 如图所示,杆AB的两端分别沿框架的水平边及铅 垂边滑动,该框架可绕铅垂边转动,则该系统有 __________个自由度。 A: B: C: D: 4 3 2 1
9
思考题:OA杆绕O轴匀角速度转动,均质圆盘在水平地面上纯
北航7系理论力学d-ch5C
对于定常约束的保守系统,哈密顿函数H就是系统的动能与 势能的和,即: H T V
2013-11-2 3
BUAA
z
§5-4、哈密顿方程
例:求自由质点在重力作用下的哈密顿函数和哈密顿方程 1、系统的广义坐标: x, y , z
2、系统的动能和势能
2013-11-2
1 T m( x 2 y 2 z 2 ) V mgz mg 2 p x mx y p T , ( j 1,2,3) p y my j q j x p z mz 1 2 2 系统的哈密顿函数 H=T+V H [ p x p 2 p z ] mgz y 2m H py px pz qj , ( j 1,2,, k ) x ,y ,z p j m m m p x 0, p y 0, p z mg H pj , ( j 1,2,, k ) q j m 0, m 0, m mg x y z
20世纪80 年代,提出了 哈密顿系统的 辛算法。该算 法可保持长期 数值计算的稳 定性。
2013-11-2
年被选为中国科学院学部委员(数学物理学部
院士)。 在拓扑代数、广义函数和计算数学等领 域取得多方面首创性成就,并对我国计算机 事业的创建和发展做出了重要贡献。
15
BUAA
例题的数值仿真
l0
k
k
m
1 2 1 T J z m( x 2 x 2 2 ) 2 2 B A J 1 2 Q ' 0, Q ' M x z V kx x 2 d L L ' Qx m mx 2 kx 0 x dt x x M d L L g ' ( J z mx 2 ) 2mxx M Q dt 当 时 M 2mxx 问题:该题还可以用什么方法求解?
北航理论力学部分课件
空间力系
FR y FR z
∑F =∑ F =∑ F
∑ ∑
ix iy
iz
= 0 = 0 = 0
有三个独立的平衡方程
FR = FRx i + FRy j + FRz k = 0
FR =
F
+F
2 Ry
+F
2 Rz
=0
平面力系
FRx = FRy =
F ix = 0 F iy = 0
2010-11-27 8
理论力学
§1 - 0
力学模型与力系
•共点力系 共点力系(concurrent force system):力作用线汇交于一点的力系。 力作用线汇交于一点的力系。 共点力系 力作用线汇交于一点的力系 F1 F1
Fn
Fn
A
F2
A
F2
若共点力系中,力的作用线在同一平面内,则称为平面 若共点力系中,力的作用线在同一平面内,则称为平面 共点力系(concurrent coplanar force system)。 共点力系 。 若共点力系中,力的作用线不在同一平面内,则称为空 若共点力系中,力的作用线不在同一平面内,则称为空 间共点力系(concurrent noncoplanar force system) 。 间共点力系
§1 - 0
力学模型与力系
•刚 (rigid body):具有质量,考虑其形状和尺寸大小,其上 刚 ) 具有质量,考虑其形状和尺寸大小, 任意两点间的距离保持不变(或距离变化可以不计)的物体。 任意两点间的距离保持不变(或距离变化可以不计)的物体。
• 特点:所研究的问题与 特点: 物体的质量和姿态有关, 物体的质量和姿态有关, 其变形可以忽略不计。 其变形可以忽略不计。
北京航空航天大学本科理论力学习题课动.ppt
dvr dvr dR dt dR dt
dR dt
vr
cos
mvr
cos
dvr dR
mR 2
cos
vrdvr R2dR
v2 r
2R2
C
22
aa 0, ae 2R, aC 2 vr
x': 0 ae arx' aC cos450 y': 0 0 ary' aC sin 450
ar
a2 rx '
a2 ry '
12
习题1-10:求滑块A的加速度绳索的拉力。
v0
s FvA
FN
mg
ma F FN mg
x : mx F cos mg
x
(
x2
2R4x R2)2
mx Fx
15
y’
方法三:求滑块的速度
动点:滑块A
vr
动系:ox’y’,x’轴平行于绳
速度分析
θ
运动分析
va v x’ e
绝对运动: 直线运动 相对运动: 直线运动 牵连运动: 定轴转动
va ve vr ve x vr ( )R
y : 0 ve vr sin x : x va vr cos
动点:圆盘中心O 动系:AB杆
A
AB
运动分析: 绝对运动: 直线运动
v r 300 n ae
相对运动: 直线运动 AB 牵连运动: 定轴转动
y'
aa
o ve Rar va
aB et
速度分析
vr 0,
va ve vr va ve
AB
ve OA
va 2R
加速度分析 aa aet aen ar aC
北京航空航天大学理论力学课件_0绪论
理论力学绪论•什么是力学?•力学是怎样发展的?•理论力学的学习目的•理论力学的研究内容•理论力学的研究方法什么是力学?•力学是研究物体机械运动规律的科学。
•物体的机械运动是指物体的空间位形(位置和形状)随时间的变化。
–移动、转动、流动和变形•力学的研究为揭示自然界中与机械运动有关的规律提供了有效的工具,它也是近代工程技术的重要理论基础之一。
力学的发展始终是和人类社会活动紧密联系的,它的发展与完善推动了科学技术和社会的进步。
力学发展遵循认知规律指导实践并发现或提出新问题理性认识(或深入理性认识)感性认识(或初步理性认识)1、建筑与桥梁建于1056年山西应县木塔早期筒体结构建筑比萨斜塔建于1173-1370年观察竹子的特征竹子的横截面比萨斜塔横截面早期建筑的特点:高度低,跨度小,承载能力低,材料为砖石和木材。
赵州桥建于581-599 年跨度:37. 4m拱高:7m早期拱形结构建筑“敞肩拱”的运用为世界桥梁史上的首创,并有“世界桥梁鼻祖”的美誉。
现代筒体结构建筑高度:452米材料:钢筋混凝土吉隆坡双塔大厦建筑物高度增加会产生什么新问题?风载会引起高层建筑物的晃动双塔大厦利用结构阻尼减小塔体的晃动现代大跨度桥梁桥梁跨度增大又会产生什么新问题?美国华盛顿州塔科马悬索桥建造设计风速60m/s破坏时的风速19m/s 建于1940年,桥长853m事后分析引起桥梁振动的原因计算机模拟与仿真地震对建筑物的影响如何减小地震对建筑物的影响?建筑物减震的模拟实验研究美国旧金山国际机场新楼使用了移动地基2、机械手与机器人机械手在工业生产中的应用天津大学研制的医用缝合机械手六足步行机器人步行机器人的应用前景从分析研究人体的行走到双足步行机器人的实现,体现了力学、自动控制和计算机等科学技术的综合应用。
北京理工大学研制力学的发展-车辆与飞机3、车辆与飞机车辆的早期研制与应用早期的农用车辆现代车辆研究提出的要求:舒适、安全、高速、便捷、环保利用计算机分析车辆的动力学问题汽车自动驾驶的实验研究早期直升机—原理的认识现代直升机—科学技术的综合应用社会的发展与进步需要科学技术的不断发展与创新。
北京航空航天大学理论力学2期末总复习PPT
( j 1,2,, k )
d L j dt q
L 0 q j
4
BUAA
当主动力部分为有势力时
总复习
d T j dt q T Q j ( j 1,2,, k ) q j L Q 'j q j
Fi Fix i Fiy j Fiz k
动力学普遍方程 的直角坐标形式
i i m i j m i k FIi m x y z
ri xi i yi j zi k
n n i 1
(F
i 1
n
ix
mi aix )xi ( Fiy mi aiy )yi ( Fiz mi aiz )zi 0
i 1
2
BUAA
总复习
例题:双摆由两个均质杆组成,初始时杆水平,求该瞬
时各杆的角加速度。已知杆的质量为M,杆长为L 解题步骤:
1:确定系统的自由度
2:建立加速度间的关系
3:确定惯性力 4:应用动力学普遍方程 求解
3
BUAA
总复习
设:具有完整理想约束的非自由质点系有 k 个自由度 系统的广义坐标为: q1 , q2 ,, qk
0 1 2 l0 l
定点运动刚体上点的速度和加速度
r
r r 速 度:v lim t 0 t dv d ( r ) r v a 加速度:
dt
dt
a aR a N
11
BUAA
B点的绝对速度和绝对加速度。
M g M o J z '
Mo M g 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
2011-11-1
BUAA
l0
k
§5-5、第一类拉格朗日方程
A
x1
A
m1 g θ 2
m2 g
x
O
θ
ϕ
B
B
B
θ3
A
地面光滑
D
y
m3 g
•应用第二类拉格朗日方程必须选取独立的 应用第二类拉格朗日方程必须选取独立的 位形坐标。 位形坐标。 •第二类拉格朗日方程不能求约束力。 第二类拉格朗日方程不能求约束力。 第二类拉格朗日方程不能求约束力
λ2
A( x1 , y1 ) F(t) x
m1 g
θ2
m1&& = F(t) − λ2 x1 m1&&1 = −m1g + λ1 − λ3 y m2 &&2 = λ2 − λ4 x m2 &&2 = −m2 g + λ3 − λ5 y &2 JC2θ& = −L cosθ2λ2 − Lsin θ2λ3 − Lcosθ2λ4 − Lsin θ2λ5 m3&&3 = λ4 x m3 &&3 = −m3 g + λ5 y &3 JC3θ& = −L cosθ3λ4 − Lsinθ3λ5 10
3
2011-11-1
BUAA
系统的自由度: 系统的自由度: k=n-s
§5-5、第一类拉格朗日方程
设描述系统位形的坐标 :q1 ,L qn
二、第一类拉格朗日方程
系统的约束方程为: 系统的约束方程为: fi (q1,L, qn , t) = 0, (i = 1,L, s) 受完整理想约束系统的Hamilton原理 系统的真实运动满足 原理:系统的真实运动满足 受完整理想约束系统的 原理
2011-11-1 5
BUAA
学方程并求约束力。 学方程并求约束力。 y
§5-5、第一类拉格朗日方程
例:应用第一类拉格朗日方程建立滑块A(视为质点)的动力 应用第一类拉格朗日方程建立滑块 (视为质点) 解:1、给出系统动能 、 1 T = m1 ( x 2 + y 2 ) & & 2 2、求系统主动力的广义力 Qx = F (t ), Qy = −mg 3、给出系统约束方程 、
f = x2 + y 2 − R2 = 0
m&& = 2λx x
d2 f = x&& + y&& + x 2 + y 2 = 0 x y & & 2 dt
m&& = mg + 2λy, y
2λR2 = −mgy − m(x2 + y2 ) & &
m(x&& + y&&) = −m(x2 + y2 ) x y & & x(m&&) + y(m&&) = −m(x2 + y2 ) x y & &
s ∂f d ∂T ∂T − = Q j + ∑ λi i , d t ∂q j ∂q j ∂q j i =1 &
A( x, y ) F(t) x
m1 g
f1 = y = 0
m&& = F (t ) x
( j = 1, 2)
2011-11-1
m& = −mg + λ y &
s
f i ( q1 ,L , q n , t ) = 0, (i = 1,L , s )
s
∂fi 其中: λi ∑ ∂q 为约束力对应于坐标q j的广义力, λi称为拉格朗日乘子。 j i=1
2011-11-1 4
BUAA
§5-5、第一类拉格朗日方程
s ∂f i d ∂T ∂T − ∂q ∂q = Q j + ∑ λi ∂q , ( j = 1,L , n ) dt & j j j i =1
C 2 ( x2 , y 2 )
B
θ3
m2 g
C 3 ( x3 , y 3 )
D
m3 g
2011-11-1
BUAA
λ2
λ3
A
§5-5、第一类拉格朗日方程
4、分析Lagrange乘子的物理含义 m1&& = F(t) − λ2 、分析 乘子的物理含义 x1 y m1&&1 = −m1g + λ1 − λ3 y x
C 2 ( x2 , y 2 )
B
m2 g
f1 = y1 = 0
f2 = x2 − x1 − Lsinθ2 = 0
AB = BD = 2 L
θ3
f3 = y2 − y1 + Lcosθ2 = 0
C3 ( x3 , y3 ) f = x − x − Lsinθ − Lsin θ = 0 4 3 2 2 3
f i ( q1 ,L , q n , t ) = 0, (i = 1,L , s )
• 应用第一类 应用第一类Lagrange方程建立系统动力学方程 方程建立系统动力学方程 的基本步骤: 的基本步骤:
– 将各物体的约束解除,确定各物体的广义坐标(n) 将各物体的约束解除,确定各物体的广义坐标( ) – 用广义速度和广义坐标描述系统的动能 用广义速度和广义坐标描述系统的动能T – 给出解除约束后对应于广义坐标的主动力的广义力 – 给出系统的约束方程(s) 给出系统的约束方程( ) – 将系统动能和约束方程代入第一类 将系统动能和约束方程代入第一类Lagrange方程 方程
λ2 = FN ,
8
2011-11-1
& x y && − Rθ& = 0, && = 0
BUAA
y
§5-5、第一类拉格朗日方程
例:应用第一类拉格朗日方程建立系统动力学方程并求约束力 解:1、给出系统动能和约束方程 、
A( x1 , y1 ) F(t) x
m1 g
θ2
1 1 1 & T = m1 ( x12 + y12 ) + m2 ( x2 + y 2 ) + J C 2θ 22 & & &2 & 2 2 2 2 1 1 & + m3 ( x3 + y3 ) + J C 3θ 32 &2 & 2 2 2
y
& & an = (x + y )/ R
2 2
y sin θ = R
f = x + y −R =0
2 2
∂f ∂f ∂f FN = λ( i + j + k) ∂x ∂y ∂z
mgy m(x2 + y2 ) & & FN = − − R R
λ1
λ4
λ5
B
λ1:地面作用在
滑块上的约束力
2011-11-1 D
λ2 , λ3:铰链A作用在AB杆上的约束力 λ4 , λ5:铰链B作用在BD杆上的约束力
11
BUAA
θ
§5-5、第一类拉格朗日方程
质量为m的质点被约束在半径为R的光滑圆柱面上 的光滑圆柱面上, 例: 质量为 的质点被约束在半径为 的光滑圆柱面上,用 第一类拉格朗日方程建立质点的运动微分方程。 第一类拉格朗日方程建立质点的运动微分方程。 (r,θ ) O 解:1、给出质点的动能 、
n
⇔
d ∂T ∂T − 利用δq j ( j = 1,L, k )的独立性,有: ∂q ∂ q = Q j dt & j j
受完整理想约束系统的Hamilton原理 系统的真实运动满足 原理:系统的真实运动满足 受完整理想约束系统的 原理
δw = ∫
t1
t0
d ∂T ∂ T (δT + Q δq )dt = 0 ⇔ − ∂q = Q j ( j = 1, L , k ) d t ∂q j & j
D
m3 g
2011-11-1
f5 = y3 − y2 + Lcosθ2 + Lcosθ3 = 0
9
BUAA
2、求系统的广义力 、 y
§5-5、第一类拉格朗日方程
Qx1 = F(t), Qy1 = −m1g, Qx2 = 0, Qy2 = −m2 g, Qx3 = 0, Qy3 = −m3 g
3、求系统的Lagrange方程 、求系统的 方程
δw = ∫ [δ (T + Φ T λ ) + Q T δq ]dt = 0
t0
t1
λT = [λ1,L, λs ]
f1 Φ = M =0 fs
∂f i d ∂T ∂T ∑ λi ∂q , ( j = 1,L , n ) dt & j j j i =1
θ
M
Fy
解:动能、约束方程和主动力的广义力 动能、
x
Fx
mg
c
1 1 &2 2 2 T = m( x + y ) + J cθ & & 2 2 f1 = x − Rθ = 0, f2 = y = 0
Qx = Fx ; Qy = − mg − Fy ; Qθ = M
m&& = λ1 + Fx , x
∂f i d ∂T ∂T − ∂q ∂q = Q j + ∑ λi ∂q , ( j = 1, 2,3) dt & j j j i =1