10-分析动力学9-Kane方法(课堂PPT)
基于Kane法的五杆式人机合作机器人动力学分析及仿真

引言
是牛顿的矢量力学和拉格朗日的分析力学[7-9]。矢量力学需
人机合作机器人(collaborative robot 简称 Cobot)的出 现使机器人和操作者在同一工作空间内协同作业成为可能。 Cobot 以 被 动 和 约 束 方 式 工 作 , 利 用 不 完 全 约 束 机 构 (Nonholonomic Constrant Tansmission ,简称 NCT)使动力 源的运动只改变关节之间的速度比,对机器人末端的运动轨 迹只能进行约束而不是驱动。操作者和 Cobot 合作时,承载 重力、轨迹约束控制等功能由 Cobot 完成,操作者只需提供
第 21 卷第 6 期 2009 年 3 月
系 统 仿 真 学 报© Journal of System Simulation
Vol. 21 No. 6 Mar., 2009
基于 Kane 法的五杆式人机合作机器人动力学分析及仿真
路敦民 1, 张立勋 2, 杨向东 3, 陈 恳 3
(1.北京林业大学工学院, 北京 100083;2.哈尔滨工程大学机电工程学院, 哈尔滨 150001;3.清华大学精仪系, 北京 100084)
要将机构的每一个构件都进行隔离,对每个构件都建立相应 的牛顿方程和欧拉方程,方程中包含了不做功的内力(矩) 和外力(矩),求解时常采用递推算法,十分繁琐,工作量 大。拉格朗日基于功能原理把整个系统描述成一个封闭的数 学表达式,方程中包含有大量的积分和求导,给求解带来困 难。美国学者Kane在20世纪60年代发明了Kane方法,Kane 方法综合了分析力学与矢量力学的优点,采用广义速率作为 广义坐标的独立变量,引入偏速度(偏角速度)的概念,建
3. Department of Precision Instruments and Mechanology, Tsinghua University, Beijing 100084, China)
第8章化学动力学ppt课件

376 463
lnk2
10 20
增加
1倍
1000 2000 100 200 1倍
lnk/[k]
活化能更高
200 100
20
10
活化能较低
1
活化能较高
(b) 对不同反应,Ea 大,k随T的变 化也大,如 Ea(3)Ea(2)。
1
T /K
ln k 2
3
2
2000 1000 1 463 376 T /K
基元反应中,同时直接参加反应的分子(或离子、 原子、自由基等)的数目称为反应分子数。
根据反应分子数可将基元反应分为单分子反应、双 分子反应和三分子反应。例如:
单分子反应:SO2Cl2=SO2+Cl2 双分子反应:NO2+CO=NO+CO2 三分子反应:H2+2I=2HI
Note:按照反应的分子数来分类,只适合于基元反应。
如果 aA + bB = dD + eE 为基元反应,
则:
ka ccb
AB
Note:
①质量作用定律仅适用于基元反应。
②只有基元反应,才能说反应分子数! 在基元反应中,反应级数和反应分子数数值 相等,都是反应物的计量系数之和,但反应 分子数是微观量,反应级数是宏观量。
③组成复杂反应的每个基元反应都有自己的速 率方程;但它的总反应速率方程是由实验确 定的。
瞬时速率是初始速率 0
从瞬时速率的定义, 可以归纳出瞬时速率的求法:
(1) 做浓度— 时间曲线图; (2) 在指定时间的曲线位置上做切线; (3) 求出切线的斜率(用做图法, 量出线段长, 求出比 值)
例题:2700s时的瞬时速率:
A点的斜率= (50 .5 8 .10 4) 4 0 120 2.5 81 0 5
酶动力学分析PPT课件
第20页/共101页
• 式(3-12 ) 即米 氏 方 程 , 式中 的 两 个 动 力学 参 数 是 KS和 rP,max。 其 中 :
KS
k1 k1
CSCE C[ ES ]
KS表示了酶与底物相互作用的特性。KS的单位和CS的单位相同, 当rP=1/2 rP,max 时,存在KS=CS关系。
rP,max =k+2CE0。表示当全部酶都呈复合物状态时的反应速率。
• 根据质量作用定律,P的生成速率可表示为:
rP k2CES
( 3-11 )
式中:
C[ES] —中间复合物[ES]的浓度,它为 一难测定的未知量,因而不能用它来 表示最终的速率方程。
第16页/共101页
对上述反应机理,推导动力学方程时的三点假 设:
• (1)在反应过程中,酶的浓度保持恒定,即: CE0=CE+C[ES]。
建立反应动力学方程
确定适宜的操作条件
第3页/共101页
酶促反应特征
• 优点:
• 不足:
• 反应在常温、常压、中性pH范围进行,节能且效 率高。
• 反应专一性强,副产物生成少; • 反应体系简单,反应最适条件易于控制。
• 反应仅限少数步骤,经济性差; • 反应周期较长;
第4页/共101页
第一节 均相酶促反应动力学
一级反应速率方程。
rS
rmax很大时,大部分酶为游离态的酶,而C[ES] 的量很少。要想提高反应速率,只有通过提高CS值, 进而提高C[ES],才能使反应速率加快。因而此时反 应速率主要取决于底物浓度的变化。
将上式进行重排,积分,可以推出
rmaxt
Km
ln
CS0 CS
第28页/共101页
10-分析动力学9-Kane方法(课堂PPT)

N
N
Fi
v(v) i
(mir&&i ) vi(v) 0
i 1
i 1
其中: vi( v )
r&i uv
方程是否仅含有广义速率而不包含广义坐标?
2
Page 5
例1:质点系的Kane方程
广义速率: u1 x&;u2 &
y mA g x
质点的速度为:
O
A
x
r&A u1i
r&B u1i lu2 (cosi sin j)
0
2
u3
u3 u2 Au1 (C B)u2u3
0
u1
Bu2
(
A
C )u1u3
u2 u1 0 Cu3 (B A)u1u2
因此得到 F%1* Au&1 (C B)u2u3
类似求出
F* (2)
Bu&2 (A C)u3u1
F* (3)
Cu&3 (B
A)u1u2
代入Kane方 程,得到
l
u&1e1 u1ω e1 u&2e2
)e1
(u&2
u1u2 l
)e2
u2ω
e2
角加速度:
ε
u&2 l
e3
2
Page 20
例3:非完整系统
F%v*
MaC
v(v) o
JC ε ω
JC ω
ω(v) o
ye2 vA
F%v
F
v(v) o
Lo
ω(v)
C e1
外力垂直于伪速度:F%1 0; F%2 0
ω(v)
动力学介绍与模态分析.ppt

动力学 - 基本概念和术语
质量矩阵(接上页)
应当采用哪种质量矩阵? • 对大多数分析来说,一致质量矩阵为缺省设定; • 若结构在一个方向的尺寸与另两个方向相比很小时,可采用简化质
量矩阵(如果可能得到的话)或集中质量矩阵例如细长的梁或很薄 的壳; • 集中质量矩阵可用于波的传播问题。
M1-25
M1-14
动力学 - 基本概念和术语
运动方程(接上页)
其中: [M] [C] [K] {F} {u} {ů} {ü}
= 结构质量矩阵 = 结构阻尼矩阵 = 结构刚度矩阵 = 随时间变化的载荷函数 = 节点位移矢量
= 节点速度矢量 = 节点加速度矢量
M1-15
动力学 -基本概念和术语
求解方法
如何求解通用运动方程 ? • 两种主要方法:
M1-27
动力学 - 基本概念和术语
阻尼(接上页)
滞后和固体阻尼 • 是材料的固有特性 • 在动力学分析中应该考虑 • 认识还不是很透彻,因此很难定量的确定
库仑或干摩擦阻尼 • 物体在干表面上滑动时产生的阻尼 • 阻尼力与垂直于表面的力成正比
– 比例常数 m 就是摩擦系数 • 动力学分析中一般不予考虑
M1-30
动力学 - 基本概念和术语
阻尼(接上页)
a 阻尼
• 亦可称作质量阻尼
• 只有当粘度阻尼是主要因素时才规定此值
,如在进行各种水下物体、减震器或承受
a3
风阻力物体的分析时
Damping Ratio
• 如果忽略b 阻尼,a 可通过已知值x(阻尼
2
比) 和已知频率w来计算:
a = 2xw
1
因为只允许有一个a值,所以要选用最主要
经典分子动力学方法详解课件
第19页,共39页。
基本单元大小的选择
• 基本单元的大小必须大于2Rcut(Rcut是相互作用势的 截断距离)或Rcut<1/2 基本单元的大小。这保证了任
何原子只与原子的一个镜像有相互作用,不与自己的镜 像作用。这个条件称为“minimum image criterion” • 在我们所研究的体系内的任何结构特性的特征尺寸或任 何重要的效应的特征长度必须小于基本单元的大小。 • 为了检验不同基本单元大小是否会引入“人为效应”,必 须用不同的基本单元尺寸做计算,若结果能收敛,则尺寸 选择是合适的。
MD方法的发展史
• MD方法是20世纪50年代后期由B.J Alder和T.E. Wainwright创造发展的。他们在1957年利用MD方法, 发现了早在1939年根据统计力学预言的“刚性球组成 的集合系统会发生由其液相到结晶相的相转变”。
• 20世纪70年代,产生了刚性体系的动力学方法被应 用于水和氮等分子性溶液体系的处理,取得了成功。 1972年,A.W. Less和S.F. Edwards等人发展了该 方法,并扩展到了存在速度梯度(即处于非平衡状态) 的系统。
建立完全弹性碰撞方程,借以求解出原子、分子的运动
规律。这种处理可以在液晶的模拟中使用。 • 质点力学模型是将原子、分子作为质点处理,粒子间
的相互作用力采用坐标的连续函数。这种力学体系的应 用对象非常多,可以用于处理陶瓷、金属、半导体等无
机化合物材料以及有机高分子、生物大分子等几乎所有
的材料。
第14页,共39页。
• 为了减小“尺寸效应”而又不至于使计算工作量过大,对
于平衡态MD模拟采用 “周期性边界条件”。
第16页,共39页。
机器人学第七章(机器人动力学的凯恩方法)
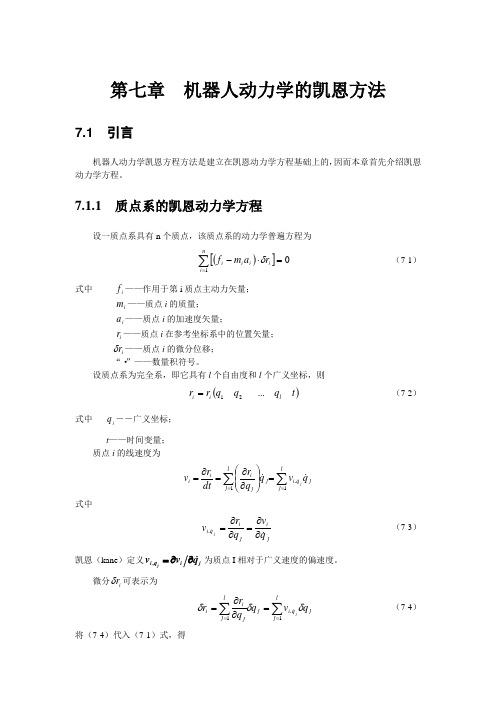
第七章 机器人动力学的凯恩方法7.1 引言机器人动力学凯恩方程方法是建立在凯恩动力学方程基础上的,因而本章首先介绍凯恩动力学方程。
7.1.1 质点系的凯恩动力学方程设一质点系具有n 个质点,该质点系的动力学普遍方程为()[]01=⋅-∑=ni i i i ir a m fδ (7-1)式中 i f ——作用于第i 质点主动力矢量;i m ——质点i 的质量;i a ——质点i 的加速度矢量;i r ——质点i 在参考坐标系中的位置矢量;i r δ——质点i 的微分位移;“·”——数量积符号。
设质点系为完全系,即它具有l 个自由度和l 个广义坐标,则()t q q q r r li i (21)= (7-2)式中 i q ――广义坐标;t ——时间变量; 质点i 的线速度为j lj q i j l j j i i i q v q q r dt r v j ∑∑===⎪⎪⎭⎫ ⎝⎛∂∂=∂=1.1 式中j i j i q i qvq r v j ∂∂=∂∂=. (7-3)凯恩(kane )定义,j i q i j v v q =∂∂为质点I 相对于广义速度的偏速度。
微分i r δ可表示为j lj q i j lj j ii q v q q r r j δδδ∑∑===∂∂=1.1 (7-4)将(7-4)代入(7-1)式,得(), 110j ll i i i i q j i j f m a v q δ==⎡⎤-⋅=⎢⎥⎣⎦∑∑ 交换求和符号,得(), 110j ln i i i i q j i j f m a v q δ==⎡⎤-⋅=⎢⎥⎣⎦∑∑因为j q 是独立变量,故(), 10j nii i i q j fm a v =-⋅=∑ j=1,2,...,l (7-5) 或, , 110j j nnii q i i i q j i fv m a v ==⋅-⋅=∑∑这就是质点系的凯恩动力学方程(Kane Dynamics Equation ),可以改写为', 1', 101,2,,_______j j j j nj i i q i n j i i i q i F j l F f v F m a v F ==⎫⎪+==⋅⋅⋅⎪⎪=⎬⎪⎪=⎪⎭⋅⋅∑∑广义主动力广义惯性力 (7-6)7.1.2 刚体的凯恩动力学方程如图7-1所示将刚体看成是由n 个质点组成的。
分析动力学Kane方法

v 1
v
刚体上的任意一点P的速度为
f
v p vo ω op
刚体上任一点 的偏速度可以 表示为基点的 偏速度的函数
2019年4月17日
f (v) (0) (v) (0) v p vo uv vo ω uv ω op v 1 v1
2019年4月17日
刚体的广义惯性力
(v) ao ε op ω ω op vo dm B
(v) 1 ao vo dm B
B
(v) (v) aodm vo Mao vo
(v) (v) 2 ε op vo dm ε op dm vo B B (v) (v) ε opdm vo ε M oc vo B
主动力:
mB lg sin
2019年4月17日
例1:质点系的Kane方程
* 惯性力: FA mA xi mAu1i
rB rA le l2en 2 xi l (i cos j sin ) l2 (i sin j cos )
(1) A (1) B
(2) A (2) B
0 l (cos i sin j)
f FA 0; FB mB gj (v) (0) r v u v i i v i (1) (1) 广义主动力: F v 1 1 F A vA F B vB 0 (2) F2 FA v(2) F v B B gj l (cos i sin j) B m A
f)
各广义速率所对应的广义主动力和广义惯性力之和为0 将力投影到伪速度上所得到的平衡方程。 2019年4月17日
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ω(v)
op
uv
v(0) o
ω(0)
op
v 1
P点的偏速度为
v(v) p
v(v) o
ω(v)
op
的偏速度可以 表示为基点的 偏速度的函数
2
Page 9
刚体的广义主动力
N
F%v
Fi
v(v) i
i 1
v(r) pi
vo(r)
ω(r)
opi
N
N
广义主动力为: F%v Fi vo(v) Fi (ω(v) opi )
如何取得最少变量: 笛卡尔坐标广义坐标广义速度伪速度
如何建立方程
2
Page 2
偏速度:质点系
由N个质点组成的系统,有f=3N-r-s个自由度,广义速度:
ri ri (q1, q2 ,L , ql ,t)
f
r&i
l k 1
ri qk
q&k
ri t
伪速度: q&j hjvuv hj0 ( j 1, 2,L l)
i 1
N
定义广义主动力: F%v
Fi
v(v) i
i 1
N
定义广义惯性力:F%v*
(mi&r&i )
v(v) i
i 1
Kane方程: F%v* F%v 0 (v 1, 2,L f )
各广义速率所对应的广义主动力和广义惯性力之和为0 将力投影到伪速度上所得到的平衡方程。
2
Page 4
质点系Kane方程的基本思路
设刚体基点O的速度、角速度与伪速度的关系是:
f
vHale Waihona Puke vo(r )uvv(0) o
v 1
偏速度
f
偏角速度
ω ω(r)uv ω(0)
v1
刚体上的任意一点P的速度为 vp vo ωop
vp
f
vo(v)uv
v(0) o
f
ω(v)uv
ω(0)
op
v1
v1
刚体上任一点
f
vp
v(v) o
分析动力学之 Kane方程
清华大学航天航空学院 王天舒(tswang@)
2
Page 1
本节内容
建立动力学方程的方法: 牛顿欧拉方法:方程简单,但需考虑约束力 第二类拉氏方程:不考虑约束力,只用到速度,要求导 第一类拉氏方程:可处理非完整约束,引入代数方程 Apell方程:引入伪速度,需计算加速度 是否有类似于牛顿方法的最少变量方法?
B ao ε op ω
ω op
vo(v)dm
1
B
ao
N
N
Fi
v(v) i
(mir&&i ) vi(v) 0
i 1
i 1
其中: vi( v )
r&i uv
方程是否仅含有广义速率而不包含广义坐标?
2
Page 5
例1:质点系的Kane方程
广义速率: u1 x&;u2 &
y mA g x
质点的速度为:
O
A
x
r&A u1i
r&B u1i lu2 (cosi sin j)
mBlg sin
2
Page 6
例1:质点系的Kane方程
惯性力: FA* mA&x&i mAu&1i
&r&B &r&A l&&e l&2en
v(1) A
i;
v(2) A
0
v(1) B
i;
v(2) B
l(cosi
sin j)
&x&i l&&(i cos jsin) l&22 (i sin jcos)
mBl cos&& mBl2&&
mBl cos&& mBl2&& mB g sin 0 F%2 mB g sin
(mA mB )&x& mB (l&&cos l&22 sin) 0
2
Page 8
偏速度:刚体
设刚体B上的P1,P2,…,PN点处分别作用有主动力F1,F2,…,FN。 取刚体的上的O点为基点,取伪速度为u1,u2,…,uf。
牛顿方法
变量(坐标):
ri xi i yi j zik T
基本方程:
Fi mir&&i Ni 0
消去约束力,减少变量数
虚功率原理
N
(Fi mi&r&i ) r&i 0
速度变分不一定独立
i 1
Kane方法 独立变量(伪速度)
基本方程:
f
r&i
vi(v)uv
v(0) i
v 1
v(v) p
v(v) o
ω(v)
op
广义惯性力为:
F%v*
B ao ε op ω
ω op
v(v) o
ω(v)
op
dm
令
B ao ε op ω
ω op
v(v) o
dm
B ao ε op ω
ω op
ω(v) op
dm
2
Page 11
刚体的广义惯性力
广义惯性力:
F%1*
FA*
v(1) A
FB*
v(1) B
mA&x&i i
mB &x&i l&&(i cos jsin) l&22 (i sin jcos) i
mA&x& mB&x& mB (l&&cos l&22 sin)
(mA mB )&x& mB (l&&cos l&22 sin) 0 F%1 0
i 1
i 1
利用体积公式 V a (b c) (a b) c
F%v
N
Fi
vo(v)
N
opi
Fi
ω(v)
i1
i1
F%v F vo(v) Lo ω(v)
F是外力的主矢量 Lo是外力的主矩
2
Page 10
刚体的广义惯性力
F%v*
B
aP
v
(v p
)dm
ap ao ε op ω ω op
偏速度:
v(1) A
i;
v(2) A
0
v(1) B
i;
v(2) B
l(cosi
sin j)
B
mB g
主动力: FA 0;FB
广义主动力: F%1 FA
mB gj
v(1) A
FB
v(1) B
0
r&i
f v 1
vi(v)uv
v(0) i
F%2
FA
v(2) A
FB
v(2) B
mB gjl(cosi sinj)
2
Page 7
例1:质点系的Kane方程
F%2*
FA
v(2) A
FB
v(2) B
mA&x&i 0
v(1) A
i;
v(2) A
0
v(1) B
i;
v(2) B
l(cosi sin j)
mB &x&i l&&(i cos jsin) l&22 (i sin jcos)
l(cosi sin j)
v1
f
r&i
vi(v)uv
v(0) i
广义速率本质上为伪速度,标量
v 1
偏速度的作用是赋予广义速率以
方向性,矢量。
广偏 义速 速度
伪速度可以看成是真实速度在偏 速度上的投影。
率
2
Page 3
质点系的Kane方程
f
质点速度的变分可以表示为: r&i vi(v) uv
N
v 1
虚功率原理: (Fi mi&r&i ) r&i 0