03-02 空间问题的四面体单元解析
空间问题的四面体单元
第三章 轴对称、三维和高次单元§ 3-2空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完 全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方 程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题 和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维 有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元 也是多种多样的,其中最简单的是四节点四面体 单元。
采用四面体单元和线性位移模式来处理空 间问题,可以看作平面问题中三角形单元的推广。
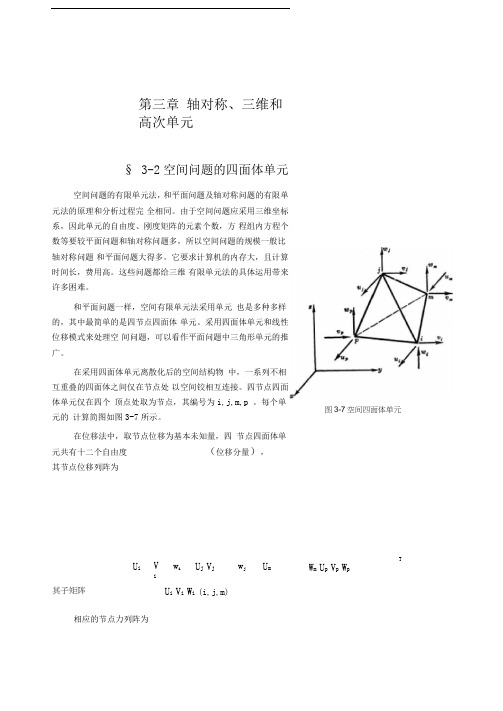
在采用四面体单元离散化后的空间结构物 中,一系列不相互重叠的四面体之间仅在节点处 以空间铰相互连接。
四节点四面体单元仅在四个 顶点处取为节点,其编号为i,j,m,p 。
每个单元的 计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四 节点四面体单元共有十二个自由度 (位移分量),其节点位移列阵为U i V i W i (i,j,m)相应的节点力列阵为U i Viw i U j V j w jU mTW m U p V p W p其子矩阵图3-7空间四面体单元F i F j F m F p其子矩阵F i U i V i w一、单元法位移函数结构中各点的位移是坐标 X 、y 、z 的函数。
当单元足够小时, 单元内各点的位移可用 简单的线性多项式来近似描述, 即u1 2 X3y 4Zv56 X7y 8Z(3-49)w0 10Xny12Z曰2,…,12是卜二个待定系数,它们可由单元的节点位移和坐标确定。
假定节 点 i,j,m,p 的坐标分别为(x i y i Z i )、、(xj y j z j )、(X m将它们代入 (3-49)式的第一式可得各个节点在X 方向的位移U i1 2X i 3Y i4Zu j1 2X j3Y j4Z jU m 1 2X m 3Y m 4 Z mU p12X p3Y p4 Z p解上述线性方程组,可得到1 ,2 ,3 ,4 , 再代入U6V[(a i bXcy d i Z)U i (a jb j x(a m b m X C m yd m z)U m(a p b p X C(3-50)y d p Z )U p ] 1 X i Y i Z i 1 X j y j Z j 1 X m y m Z m1X PY PZ P(3-52)(3-50)式,得y m Z m)、(X p y p Z p ),5y 3)5 (3-51)式中1 ,其中V 为四面体ijmp 的体积,a,b i ,…,c p ,d P 为系数。
第五讲空间问题有限元分析-

(20)
其中任意结点i上的结点载荷
Q ie Q i e x Q i e y Q i e zT N iq d A
(21)
式中, qqx
qy
T
qz
是作用在单元e单位面积上的表面力。
3·体积力的等效结点载荷
P e P i eT P j e T
eT
P m
eT T P n
e 6
6
v
e 6
2)坐标变换
x
8
N i r, s,t xi
y
i1 8
N i r, s,t y i
i1
z
8
N i r, s,t zi
i1
w
e 2
2
v
e 2
u
e 2
图2
w
e 5
5
v
e 5
u
e 5
w
e 7
w
e 1
7
u
e 7
1
v
e 1
u
e 1
z
xy
w
e 8
8
u
e 8
v
e 8
v
e 7
w
e 4
4
v
eT
F m
eT T F n
(18)
其中任意结点i上的结点载荷
F i eF ix e F iy e F iz eTN icG
(19)
式中,G G x Gy G z T是作用在单元e上的集中力; (Ni)c
是形函数Ni在集中力作用点处的取值。
返回
2 ·表面力的等效结点载荷
Q e Q i eT Q j e T Q m eT Q neT T
A 1drcsA 2crds
专题02 正四面体模型(解析版)
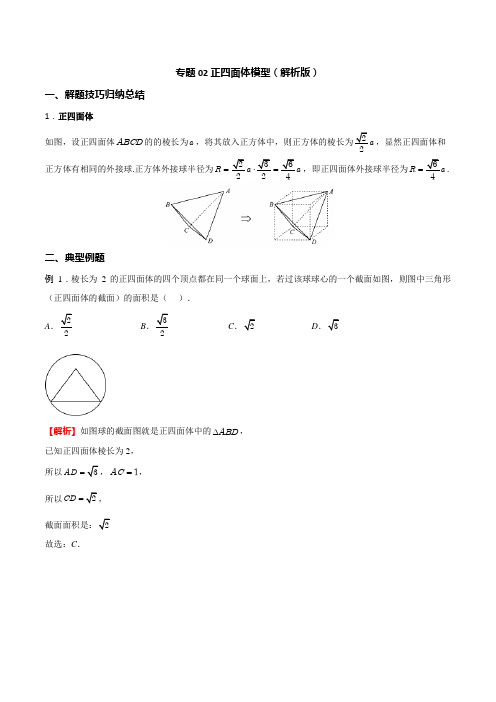
专题02 正四面体模型(解析版)一、解题技巧归纳总结1.正四面体如图,设正四面体ABCD的的棱长为a,将其放入正方体中,则正方体的棱长为22a,显然正四面体和正方体有相同的外接球.正方体外接球半径为236224R a a=⋅=,即正四面体外接球半径为64R a=.二、典型例题例1.棱长为2的正四面体的四个顶点都在同一个球面上,若过该球球心的一个截面如图,则图中三角形(正四面体的截面)的面积是().A.22B.32C.2D.3【解析】如图球的截面图就是正四面体中的∆ABD,已知正四面体棱长为2,所以=3AD=1AC,所以=2CD2故选:C.例2.正四面体的棱长为1,则其外接球的表面积为 . 【解析】解析:依题意,正四面体的外接球半径64R =,其表面积为23=42S R ππ=,故答案为32π. 三、配套练习1.棱长为1的正四面体的外接球的半径为( ) A .64B .34C .1D .33【解析】已知正四面体A BCD -的棱长为1,过B 作BE CD ⊥,交CD 于E ,A 作AF ⊥平面BCD ,交BE 于F ,连结AE ,设球心为O ,则O 在AF 上,连结BO ,22131()22BE AE ==-=,2333BF BE ==,1336EF BE ==, 22336()()263AF =-=, 设球半径为R ,则BO AO R ==, 22236()()33R R ∴=+-, 解得64R =. 故选:A .2.棱长为a的正四面体的外接球和内切球的体积比是()A.9:1B.4:1C.27:1D.8:1【解析】把棱长为a的正四面体镶嵌在棱长为x的正方体内,∴外接球和内切球的球心重合,为正方体的中心O,∴外接球的球半径为:23322x x=,22113(2)634x x h=⨯⨯⨯,33xh=,内切球的半径为:3333 2236x x x xh-=-=,∴外接球和内切球的半径之比为:33:3:1 26x x=,∴正四面体的外球和内切球的体积比是27:1,故选:C.3.如图所示,在正四面体A BCD-中,E是棱AD的中点,P是棱AC上一动点,BP PE+的最小值为7,则该正四面体的外接球的体积是()A6πB.6πC 36D.32π【解析】将侧面ABC∆和ACD∆展成平面图形,如图所示:设正四面体的棱长为a则BP PE+的最小值为22172cos120742aBE a a a=+-︒==,2a∴=.在正四面体A BCD -的边长为2, 外接球的半径6642R a ==外接球的体积3463V R ππ==.故选:A .4.表面积为83( ) A .43πB .12πC .8πD .6π【解析】表面积为8322将正四面体补成一个正方体,则正方体的棱长为2,正方体的对角线长为3 正四面体的外接球的直径为正方体的对角线长,∴外接球的表面积的值为24(3)12ππ=.故选:B .5.一个正四面体的棱长为2,则这个正四面体的外接球的表面积为( ) A .6πB .8πC 6πD .11π【解析】26, 正四面体的外接球的直径为正方体的对角线长,∴外接球的表面积的值为264()62ππ=. 故选:A .6.在棱长为2的正四面体的外接球中,相互垂直的两个平面分别截球面得两个圆.若两圆的圆心距为2,则两圆的公共弦长是( )A .34B .34C .1D .12【解析】正四面体扩展为正方体,它们的外接球是同一个球,正方体的对角线长就是球的直径,正方体的棱长为:1;对角线长为:3, 所以球的半径为:32R =, 设相互垂直两圆的圆心分别为1O 、2O ,球心为O ,公共弦为AB ,其中点为E , 则12OO EO 为矩形,于是对角线12O O OE =, 而222232()22OE OA AE AE =-=-=, 12AE ∴=,则1AB =; 故选:C .7.如图所示,正四面体ABCD 中,E 是棱AD 的中点,P 是棱AC 上一动点,BP PE +的最小值为14,则该正四面体的外接球表面积是( )A .12πB .32πC .8πD .24π【解析】将三角形ABC 与三角形ACD 展成平面,BP PE +的最小值,即为BE 两点之间连线的距离,则14BE =设2AB a =,则120BAD ∠=︒,由余弦定理221414222a a a a+--=,解得2a =, 则正四面体棱长为22,因为正四面体的外接球半径是棱长的64倍, 所以,设外接球半径为R ,则62234R ==, 则表面积244312S R πππ===. 故选:A .8.已知正四面体的棱长为4,则此四面体的外接球的表面积是( ) A .24πB .18πC .12πD .6π【解析】将正四面体补成一个正方体,则正方体的棱长为26 6,∴外接球的表面积的值为24(6)24ππ=.故选:A .9.一个棱长为6的正四面体内部有一个任意旋转的正方体,当正方体的棱长取得最大值时,正方体的外接球的表面积是( ) A .4πB .6πC .12πD .24π【解析】正方体可以在正四面体纸盒内任意转动,∴正方体在正四面体的内切球中,∴正方体棱长最大时,正方体的对角线是内切球的直径,点O 为内切球的圆心,连接PO 并延长交底面ABC 与点D , 点D 是底面三角形ABC 的中心,PD ∴⊥底面ABC ,OD ∴为内切球的半径,连接BO ,则BO OP =,在Rt BDP ∆中,236233BD ==2226PD PB BD -在Rt BDO ∆中,2222222()OD BD OB BD OP BD OP OD =+=+=+-,代入数据得62OD =,令正方体棱长为a ,则236a =,解得2a =, ∴正方体棱长的最大值为2,此时正方体的外接球半径:36222r =⨯=. ∴当正方体的棱长取得最大值时,正方体的外接球的表面积是:22644()62S r πππ==⨯=. 故选:B .10.如图,在棱长为1的正四面体ABCD 中,G 为BCD ∆的重心,M 是线段AG 的中点,则三棱锥M BCD -的外接球的表面积为( )A .πB .32πC 6D 6 【解析】连接BG ,四面体ABCD 中,由G 为BCD ∆的重心, 可得AG ⊥面BCD ,M 是线段AG 的中点,3BG ,226AG AB BG =-M 为线段AG 的中点,6MG ∴=设三棱锥M BCD -外接球的半径为R ,则23(R =226)(R +, 6R ∴=, ∴三棱锥M BCD -外接球的表面积为2342R ππ=. 故选:B .11.正四面体(四个面均为正三角形的四面体)的外接球和内切球上各有一个动点P 、Q ,若线段PQ 长463,则这个四面体的棱长为 4 . 【解析】设这个四面体的棱长为a , 则它的外接球与内切球的球心重合,且半径64R a =外,612r a =内, 依题意得66464123a a +=, 4a ∴=.故答案为:4.12.已知正四面体ABCD 的棱长为1,M 为棱CD 的中点,则二面角M AB D --的余弦值为 63;平面MAB 截此正四面体的外接球所得截面的面积为 .【解析】如图,M 为棱CD 的中点,AM CD ∴⊥,BM CD ⊥,又AMBM M =,CD ∴⊥平面AMB ,则AMB ∠为二面角A CD B --的平面角,由对称性,可知二面角C AB D --的平面角等于AMB ∠. 由正四面体ABCD 的棱长为1,可得3AM BM ==则2231()()1622cos()23AMB -∠==平面AMB 平分二面角C AB D --,∴二面角M AB D --的余弦值16cos()2AMB =∠;设BCD ∆的外心为G ,连接AG ,求得233BG BM ==,22361()3AG =-= 设正四面体ABCD 的外接球的半径为R ,则22263()(R R -+=,解得6R =平面MAB 过正四面体ABCD 的外接球的球心,∴平面MAB 截此正四面体的外接球所得截面的面积为263(8ππ⨯=.故答案为:63;38π. 13.已知某正四面体的内切球体积是1,则该正四面体的外接球的体积是 27 . 【解析】正四面体的外接球和内切球的半径之比为3:1,∴正四面体的外接球和内切球的体积比是27:1,正四面体的内切球体积是1,∴该正四面体的外接球的体积是27.故答案为:27.14.一个正四面体的展开图是边长为22的正三角形,则该四面体的外接球的表面积为 3π . 【解析】如图,一个正四面体的展开图是边长为2∴2,设底面三角形的中心为G ,则22162332AG AD ==-=, 正四面体的高2323PG =-. 再设正四面体外接球的球心为O ,连接OA , 则22263(()R R =+,解得3R =. ∴该四面体的外接球的表面积为234(3ππ⨯=. 故答案为:3π.15.如图所示,正四面体ABCD 中,E 是棱AD 的中点,P 是棱AC 上一动点,BP PE +的最小值为14,则该正四面体的外接球的体积是 3π .【解析】将侧面ABC ∆和ACD ∆展成平面图形,如图所示: 设正四面体的棱长为a ,则BP PE +的最小值为2272cos12014422a a BE a a a =+-︒==, 22a ∴=.在棱锥A BCD -中,设底面三角形BCD 的中心为M ,外接球的球心为O ,F 为BC 的中点,则362DF a ==, 22633DM DF ∴==,22433AM AD DM =-=. 设外接球的半径OA OD r ==,则433OM r =-, 在Rt OMD ∆中,由勾股定理可得:2224326()()33r r =-+, 解得:3r =.∴外接球的体积为34433r ππ=.故答案为:43π.。
四面体单元 体积计算公式

四面体单元体积计算公式在我们的数学世界里,四面体单元体积的计算可是个有趣又实用的知识点呢!先来说说四面体是啥。
想象一下,咱家里的粽子,是不是有四个尖尖的角,还有四个面?那个形状就有点像四面体。
要说这四面体单元体积的计算公式啊,那就是 V = 1/3 × S × h 。
这里的 V 表示四面体的体积,S 表示四面体的底面积,h 表示四面体的高。
就拿我之前教过的一个学生小明的事儿来说吧。
有一次课堂上,我出了一道关于四面体体积计算的题目。
题目是这样的:有一个四面体,底面是一个边长为 3 厘米的等边三角形,四面体的高是 4 厘米,让大家算算这个四面体的体积。
小明一开始可迷糊了,抓耳挠腮不知道从哪儿下手。
我就引导他,先算算底面积。
这等边三角形的底面积怎么算呢?用公式S = √3/4 × a² ,这里的 a 是三角形的边长。
那算出来底面积就是√3/4 × 3² 平方厘米。
然后再看体积公式,V = 1/3 × S × h ,把底面积和高代进去,就能算出体积啦。
小明经过一番思考和计算,终于算出了答案,那高兴劲儿,就像解开了一个超级大谜团一样。
在实际生活中,四面体的体积计算也挺有用的。
比如说建筑师在设计一些独特的建筑结构时,如果用到了四面体的元素,就得通过这个公式来算体积,确保结构的稳定性和合理性。
再比如,在一些工厂生产零件的时候,如果零件的形状接近四面体,那要计算用料多少,也得靠这个公式。
总之,四面体单元体积计算公式虽然看起来简单,但是要真正熟练掌握,并且能灵活运用到实际问题中,还需要咱们多做练习,多观察生活中的例子。
希望大家都能像小明那样,通过自己的努力,把这个知识点牢牢掌握,让数学成为我们解决问题的有力工具!。
空间几何中的平行四面体的性质

空间几何中的平行四面体的性质平行四面体是一种常见的几何体,具有一些特殊的性质。
本文将介绍平行四面体的定义、特征、性质和应用。
一、定义平行四面体是一个具有四个面,并且每两个面都平行的多面体。
它是空间中的一个四面体,其中相邻的面是平行的。
二、特征1. 面的性质:平行四面体的四个面都是平行的,其中相邻的面是平行的,而且任意两个非相邻的面之间也是平行的。
2. 边的性质:平行四面体有六条边,每条边和另外三条边都平行。
3. 顶点的性质:平行四面体有四个顶点,并且每个顶点都连接着三条边。
4. 高度的性质:平行四面体有四条高,每条高是从一个顶点垂直地下垂到另一个面上。
5. 体积的性质:平行四面体的体积可以通过计算底面积与高度的乘积来得到。
三、性质1. 平行四面体的对角线相交于一个点,该点被称为中心。
2. 平行四面体的每个角都是锐角或钝角,不存在直角和平角。
3. 平行四面体的底面积相等的两个平行四面体,它们的体积相等。
4. 平行四面体的两条对边相等的两个平行四面体,它们的体积相等。
5. 平行四面体的每个侧面都是一个平行四边形。
6. 平行四面体的平面对角面积比等于它们的底面积比。
四、应用1. 建筑工程:平行四面体可以用于建筑物的结构设计,例如某些立柱或桥梁的设计中。
2. 几何分析:平行四面体的性质在几何分析中具有重要意义,可以用于计算面积、体积等参数。
3. 空间定位:平行四面体可以用于空间定位和坐标系统的建立,有助于测量和定位目标位置。
总结:平行四面体是一个具有四个平行的面的几何体,具有特殊的性质。
它在建筑工程、几何分析和空间定位等领域都有着广泛的应用。
通过了解平行四面体的定义、特征、性质和应用,我们可以更好地理解和应用这一几何形体。
空间几何中的平行四面体与正四面体知识点
空间几何中的平行四面体与正四面体知识点在空间几何学中,平行四面体和正四面体是两种常见的多面体。
它们具有不同的特点和性质,下面将详细介绍这两种多面体的知识点。
一、平行四面体平行四面体是指四个面中的任意两个面平行的四面体。
它具有以下几个重要的性质:1. 对角线平行性质:平行四面体的任意两条对角线都是平行的。
这是因为平行四面体的两个相对面平行,因此连接相对顶点的对角线也是平行的。
2. 面积比例性质:平行四面体的相邻两个面之间的面积比等于相邻两个对角面的面积比。
具体而言,如果平行四面体的两个相邻面的面积分别为S1和S2,而另外两个对角面的面积分别为S3和S4,则有S1/S2 = S3/S4。
3. 体积计算公式:平行四面体的体积可以通过以下公式计算:V = (1/3) * S * h,其中V表示体积,S表示底面积,h表示底面到顶点的距离。
4. 平行四面体的类型:根据底面形状的不同,平行四面体可以分为正方形底面四面体、长方形底面四面体和菱形底面四面体等多种类型。
二、正四面体正四面体是指四个等边等角的三角形构成的四面体。
它具有以下几个重要的性质:1. 边长和面积:正四面体的边长相等,每个面都是等边三角形。
正四面体的面积可以通过以下公式计算:S = (sqrt(3) * a2) / 4,其中S表示面积,a表示边长。
2. 高度和体积:正四面体的高度可以通过以下公式计算:h = (sqrt(6) * a) / 3,其中h表示高度,a表示边长。
正四面体的体积可以通过以下公式计算:V = (sqrt(2) * a3) / 12,其中V表示体积,a表示边长。
3. 正四面体的特殊点:正四面体有四个特殊的点,分别为顶点、底心、重心和垂心。
顶点是四个面的交点,底心是底面三角形三个高线的交点,重心是四个面重心连线的交点,垂心是底面三角形三条垂线的交点。
4. 对称性:正四面体具有四个三角对称面和六个对称轴。
四个三角对称面将正四面体分为等价的四个部分,而六个对称轴则是通过连接各个面的中点和顶点形成的。
有限元讲稿四面体单元PPT课件
p x
解上述线性方程组,求出系数(a1,a2,a3,a4) 代入上式可得:
u Niui N ju j Nmum N pu p
同理可得v,w得位移关系为:
v Nivi N jv j Nmvm N pvp w Ni wi N j wj Nmwm N pwp
October 9, 2004
(u, v, w)
或表示为矩阵形式:
u1
1
N1 2 ,
1
N2 2
对二次单元有3个节点1= -1、2=1、3=0,形函数为:
N1
1
2
,
N2
1
2
,
N3 1 2
October 9, 2004
1=-1 =0 2=+1
1
o
2
一次单元
1=-1 1
3=0 o
3
2=+1 2
二次单元
第四章-13
第13页/共35页
(1)单元形函数
如图示,二维基本单元是平面内的正方形。局部坐标系原点位于正方形的中 心处,单元边界是4条直线。对平面线性单元有4个节点,形函数为:
u a1 a2 x a3 y a4 z v a5 a6 x a7 y a8z w a9 a10 x a11 y a12 z
October 9, 2004
第四章-1
第1页/共35页
(1)位移模式
将节点节点坐标和位移分量代入上式可得:
y j
o z
i m
ui a1 a2 xi a3 yi a4 zi u j a1 a2 x j a3 y j a4 z j um a1 a2 xm a3 ym a4 zm u p a1 a2 xp a3 y p a4 z p
空间几何的性质四面体的性质及其应用
空间几何的性质四面体的性质及其应用四面体是空间中常见的立体图形,它具有一些独特的性质和应用。
本文将介绍四面体的性质及其应用。
一、四面体的定义和性质四面体是由四个三角形面组成的立体图形。
它具有以下性质:1. 定义:四面体是由四个不在同一平面上的点及连接这些点的边组成的立体。
2. 面积和体积:四面体的表面积和体积可以通过一定的公式计算得出。
其中,表面积等于四个三角形面积之和,体积等于底面积乘以高的一半。
3. 棱和顶点:四面体有六条棱和四个顶点。
任意两个顶点之间可以连接一条棱。
4. 高、中线和外接球:四面体的高是从一个顶点到相对的底面的垂直距离。
每个面的中线是连接该面上的两个中点的线段。
四面体还可以围绕外接球,外接球的球心与四面体的顶点都在同一平面上。
二、四面体的分类根据四面体的性质,我们可以将其分为以下几类:1. 正四面体:如果四面体的四个面都是等边三角形,那么它就是正四面体。
正四面体具有对称性,在空间几何学中起到重要作用。
2. 正交四面体:如果四面体的三个互相垂直的棱对同时相等,那么它就是正交四面体。
正交四面体具有一些特殊的性质,常用于计算几何和物理学中。
3. 锐角四面体和钝角四面体:根据四个顶点形成的凸四面体的内角是锐角还是钝角,可以将四面体分为两类。
在实际应用中,这些分类有助于确定四面体的稳定性和结构特征。
三、四面体的应用四面体不仅具有美学价值,还在许多领域有实际应用:1. 建筑与工程学:在建筑设计和工程施工中,四面体的结构特性可以用于设计和计算支撑结构的强度和稳定性。
2. 化学与结晶学:在化学和结晶学研究中,四面体被广泛用于分子和晶体的描述和分析。
3. 三维造型与动画:计算机图形学中,四面体被用于表示和生成三维模型和动画效果。
4. 数学与几何学:四面体是数学和几何学中研究的重要对象之一,对于解决空间几何问题和推导数学定理有重要意义。
总结:四面体是空间几何中重要的立体图形,具有独特的性质和应用。
空间中的平行四面体的性质
空间中的平行四面体的性质平行四面体是一个特殊的多面体,它由四个平行的三角面构成。
在本文中,我们将探讨空间中平行四面体的性质和特点。
一、定义和基本性质平行四面体是一个具有四个平行的三角面的多面体。
它的基本性质如下:1. 四条边两两平行,相交于四个顶点。
2. 四个面都是三角形,且两两平行。
3. 任意两个相对的面是全等三角形。
4. 任意两个相邻的面之间的夹角相等。
二、四面体的种类根据顶点的不同位置和性质,平行四面体可以分为以下几种种类:1. 正四面体:四个面都是全等正三角形的平行四面体。
2. 斜四面体:四个面不全等,即至少存在两个不全等的面的平行四面体。
3. 直角四面体:存在一个直角的平行四面体。
4. 锐角四面体:所有面上的夹角均为锐角的平行四面体。
5. 钝角四面体:至少存在一个钝角的平行四面体。
三、平行四面体的性质除了基本性质外,平行四面体还具有一些其他的性质和特点。
1. 高度和底面积关系:平行四面体的高等于它的底面的面积乘以底面到对立面的距离。
2. 体积计算公式:平行四面体的体积等于底面积乘以高度的一半。
3. 对角线关系:平行四面体的对角线分别为刚好连接两个对立顶点的线段,两个对角线的交点位于中心。
4. 对称性质:平行四面体对称于它的中心点。
四、平行四面体的应用平行四面体的性质在实际应用中有重要的意义。
1. 体积计算:平行四面体的体积计算公式可以应用于建筑、工程等领域的体积计算。
2. 结构稳定性:平行四面体在一些结构中被用于提高稳定性和均衡性,例如桥梁和塔楼的设计。
3. 几何推理:平行四面体的性质可以用于几何推理和证明,对于数学学科具有重要意义。
结论:空间中的平行四面体是一个具有四个平行的三角面的多面体,它具有诸多特点和性质,包括边的平行性、面的平行性、对称性以及体积计算等。
平行四面体的性质在实际应用中具有重要的意义,对于建筑、工程和数学等学科都有一定的应用价值。
通过研究和理解平行四面体的性质,我们可以拓展对立体几何的认识,并应用于实际问题的解决中。
四面体的特殊性原理
四面体的特殊性原理四面体是一个具有四个面的多面体,每个面都是一个三角形。
它是空间中最简单的多面体之一,具有许多特殊性质和原理。
1.形状特性:四面体的最基本特性是其形状。
正四面体是最常见的四面体类型,其四个面都是等边三角形,并且所有的内角也相等。
正四面体具有对称性,每个面都等效地相对于其他三个面。
这种形状特性使得正四面体具有优秀的稳定性和抗力特性。
2.内外共点性:四面体的一个重要特性是其四个顶点共面且共点。
换句话说,四面体的顶点均位于同一平面上,这被称为“共点性”。
这个特性很容易证明,只需考虑四面体的两个对角线,它们必定会相交于一个点。
3.顶点对称性:四面体的另一个重要特性是其顶点的对称性。
四面体的顶点分别对称于其他三个顶点,具有相同的距离和角度关系。
这种对称性使四面体在空间中具有优雅和美学上的特殊性。
4.重心性质:四面体的重心是四个顶点的平均值,即四个顶点的坐标均值。
重心在许多应用中起着重要的作用,例如在计算力学性质时,求解质心是简化计算和分析的关键步骤。
每个面的重心位于该面的中心,而整个四面体的重心位于整个四面体内部的一个点上。
5.体积与高度的关系:四面体的体积可以根据其底面积和高度计算得出。
四面体的高度是从底面到对面顶点上垂线的距离。
根据勾股定理,四面体的高度可以通过底边长和平行于对面底边的高边的长度计算得出。
四面体的体积是其底面积和高度的乘积的1/3倍。
6.四面体剖分:四面体可以通过不同的剖分方式展示其特殊性质。
例如,当将四面体通过从顶点到对面底边作垂线分成两个小的四面体时,这两个小的四面体与原始四面体具有相似性质。
该剖分方式可以应用于几何中的许多问题,例如计算体积和表面积。
7.点与平面的关系:一个点可以描述为一个四面体的顶点,而四面体的三个面可以描述为三个相交的平面。
这种关系在几何学和图形学中得到广泛应用,例如在计算射线与平面的交点时。
8.斜四面体的稳定性:斜四面体是指四个面都是三角形,但不满足等边性质的四面体。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 轴对称、三维和高次单元§3-2 空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元也是多种多样的,其中最简单的是四节点四面体单元。
采用四面体单元和线性位移模式来处理空间问题,可以看作平面问题中三角形单元的推广。
在采用四面体单元离散化后的空间结构物中,一系列不相互重叠的四面体之间仅在节点处以空间铰相互连接。
四节点四面体单元仅在四个顶点处取为节点,其编号为i,j,m,p 。
每个单元的计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四节点四面体单元共有十二个自由度(位移分量),其节点位移列阵为{}[]Tpp p m m m j j j i i ip m j i ew v u w v u w v u w v u =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=δδδδδ其子矩阵 {}[]i iii w v u =δ (i,j,m)相应的节点力列阵为{}[]Tp mj ie F F F F F -图3-7 空间四面体单元其子矩阵 {}[]Ti i i i W V U F =一、单元法位移函数结构中各点的位移是坐标x 、y 、z 的函数。
当单元足够小时,单元内各点的位移可用简单的线性多项式来近似描述,即⎪⎭⎪⎬⎫+++=+++=+++=z y x w z y x v z y x u 121110087654321αααααααααααα (3-49) 式中1α,2α,…,12α是十二个待定系数,它们可由单元的节点位移和坐标确定。
假定节点i,j,m,p 的坐标分别为(i x i y i z )、(j x j y j z )、(m x m y m z )、 (p x p y p z ),将它们代入(3-49)式的第一式可得各个节点在x 方向的位移⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=+++=p p p p m m m m j j j j i i i i z y x u z y x u z y x u z y x u 4321432143214321αααααααααααααααα (3-50)解上述线性方程组,可得到1α,2α,3α,4α,再代入(3-50)式,得])()()()[(61p p p p p m m m m m jj j j j i i i i i u z d y c x b a u z d y c x b a u z d y c x b a u z d y c x b a Vu +++-+++++++-+++=(3-51) 其中V 为四面体ijmp 的体积,a i ,b i ,…,c p ,d p 为系数。
pppm m m j j j i i i z y x z y x z y x z y x V 1111=(3-52)p p p m m mjj ji z y x z y x z y x a = 111jji m m p p y z b y z y z = ppm m j j i z x z x z x c 111= 111ppm m j j i y x y x y x d = (i,j,m,p) (3-53)为了使四面体的体积V 不致为负值,单元四个节点的标号i,j,m,p 必须按照一定的顺序:在右手坐标系中,要使得右手螺旋在按照i →j →m 的转向转动时,向p 的方向前进,象图3-1中单元那样。
用同样方法,可以得出其余二个位移分量:])()()()[(61p p p p p m m m m m jj j j j i i i i i v z d y c x b a v z d y c x b a v z d y c x b a v z d y c x b a Vv +++-+++++++-+++=(3-54) ])()()()[(61p p p p p m m m m m jj j j j i i i i i w z d y c x b a w z d y c x b a w z d y c x b a w z d y c x b a Vw +++-+++++++-+++=(3-55) 综合表达式(3-51)、(3-54)及(3-55),可以将位移分量表示成为{}[]{}[]{}ep mj ieTIN IN IN IN N w v uf δδ===][ (3-56)其中I 是三阶的单位矩阵,[N]为形函数矩阵,而各个形函数为⎭⎬⎫+++-=+++=),(6/)(),(6/)(p j Vz d y c x b a N m i V z d y c x b a N i i i i j i i i i i (3-57) 和平面问题相似,(3-49)式中的系数1α,5α,6α代表刚性移动0u ,0v ,0w ;系数2α,7α,12α代表常量的正应变;其余6个系数反映了刚性转动x w ,y w ,z w 和常量剪应变。
这就是说,12个系数充分反映了单元的刚体位移和常量应变。
同时,可以证明:由于位移模式是线性的,两个相邻单元的共同边界在变形过程中 ,始终是相互贴合的,使得离散的模型变形中保持为连续体。
这样,选用的位移函数满足收敛的充分必要条件,保证了有限单元法解答收敛于精确解。
二、载荷移置空间问题的单元载荷移置和平面问题一样,也是根据静力等效原则,将不作用在节点上的集中力、体力、面力移置成作用在节点上的等效节点载荷。
其通用公式的形式和平面问题也是一样的,只不过多出一维空间分量。
1. 集中力设单元上某点(x,y,z)作用有集中力{}Txyz P P P P ⎡⎤=⎣⎦则仍然得到等效节点载荷{}{}P N R T ][= (3-58)这里 {}T p pp m m m j j j i i ieZ Y X Z Y X Z Y X Z Y X R ][=2. 分布体力单元上作用有分布体力{}T Z YXP ][=,则{}{}dV P N R T e ⎰=][ (3-59)其中dV 是单元中的微分体积,对于直角坐标系上式为{}{}dxdydzp N R eT e ⎰⎰⎰=][ (3-60)3. 分布面力单元的某一边界面 S 上作用有一分布面力{}[]TZ YXP =则 {}{}dA P N R Te⎰=][其中dA 是边界面S 上的微分面积。
4. 常见载荷的移置上列公式是空间问题载荷移置的通用公式。
对于四节点四面体单元,由于其采用线性位移模式,采用直接计算虚功的方法求出节点载荷比较简单。
下面介绍常见的二种载荷的移置。
(1) 重力四面体单元的自重为W ,作用在质心C 处(如图3-8)。
为求得节点载荷X i ,Y i ,Z i ,可分别假想发生1*=i u ,1*=i v 或1*=i w 的虚位移。
在1*=i u 或1*=i v 时,整个单元上各点的均没有z 方向上的虚位移,重力W 不做功,所以X i =Y i =0。
当1*=i w 时,jmp 面上各点的虚位移为零,即0*=b w ,又因bi bc 41=,所以有 41*=c w , 4WZ i -= 对于其余三个节点可得同样结论,于是有{}Tei W R ⎥⎦⎤⎢⎣⎡-=400(i,j,m,p) (3-61)即,对于四节点四面体单元承受的重力载荷,只需要把共41移置到每个节点上即可。
(2) 界面压力设四面体的一个边界面ijm 上受有一线性分布的压力P ,共在三个节点上的强度分别为q i ,0,0。
很容易看出,该力向p 点移置的等效节点力为零。
由水力学知,总压力ijm q P i ∆=31,作用于ijm 面上的d 点,d 点到ij 边和im 边的距离分别为m 到ij 及j 到im 边的距离的1/4。
于是可得{}Tijm i Tei q P P P R ⎥⎦⎤⎢⎣⎡∆=⎥⎦⎤⎢⎣⎡=021211610442(3-62) 所得各节点载荷的方向和分布力的方向相同,要求各节点载荷分量还需乘上相应的方向余弦。
图3-8 重力移置由上述面力移置结果,可求出任意线性分布面的等效节点载荷。
如在ijm 面受有线性分布面力在各点强度分别为q i ,q j ,q m ,时,在i 节点的等效载荷为ijm m j i i q q q P ∆++=)2121(61 (i ,j ,m) (3-63)三、应力应变矩阵空间问题几何方程为{}Tz y x z y x z u x w yw z u x v y u z w y vx u ⎥⎦⎤⎢⎣⎡∂∂+∂∂∂∂+∂∂∂∂+∂∂∂∂∂∂∂∂=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=γγγεεεε 将四面体单元之位移表达式(3-52)、(3-54)和(3-55)代入几何方程,即得单元应变。
用节点位移可表示为{}{}[]{}ep mj ie B B B B B δδε--==][ (3-64)式中应变矩阵子矩阵为6×3矩阵:⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=i ii i i ii i i i b d c d b c d c b V B 0000000061][ (i,j,m,p) (3-65) 由上式可以看出,每一个单元的应变矩阵是一个常量矩阵;因此,采用线性位移模式的四面体单元是常应变单元。
这与平面问题中的三角形单元是一样的。
而与平面问题的不同之处仅在于应变矩阵的阶数不同。
将表达式(3-16)代入空间问题的物理方程,即可得出用单元节点位移表示的单元应力:{}{}[]{}{}e e S B D D δδεσ][][][=== (3-66)式中弹性矩阵[]D 为⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---------=)1(221000)1(2210000)1(221000111111][μμμμμμμμμμμμ称对D 应力矩阵 []p m j iS S S S ][=S (3-67)令 μμ-=11A , )1(2212μμ--=A则⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-+-=i ii i i i b A d A c A d A b A V E S 22222i2i i1i 1i 1i i 1i 1i 1i 000c A d c A b A d A c b A d A c A b )21)(1(6)1(][μμμ (i,j,m,p) (3-68) 显然,式(3-68)中各元素均为常量,应力矩阵[S]是常量矩阵,所以,四面体单元是常应力单元。