车辆主动悬挂最优预见控制模型
浅析汽车底盘主动悬架控制方法
浅析汽车底盘主动悬架控制方法随着汽车技术的不断发展,汽车底盘主动悬架系统已经逐渐成为了一种常见的装备。
这种系统可以根据车辆当前的驾驶状态和路况来主动调节悬架硬度,提升行车舒适性和稳定性。
在本文中,我们将对汽车底盘主动悬架控制方法进行一个浅析。
一、主动悬架原理主动悬架是指车辆悬挂系统具备主动调节功能,通过传感器感知车身运动状态,再根据实时数据调节悬架系统的工作参数,实现对车身姿态和路面适应性的主动调节。
主动悬架主要包括主动减振和主动悬架控制两部分。
主动减振通过控制减振器的阻尼力来调节车辆的悬挂硬度;主动悬架控制则通过控制空气悬挂元件或电磁阻尼器来实现对车辆悬挂的主动调节。
二、主动悬架控制方法1. 传统悬架控制传统的悬架系统主要通过设置不同的弹簧和减振器来实现对车辆悬挂系统的调节。
这种悬架系统在工作过程中需要依靠车辆的行驶速度和路面情况来进行调节,无法实现主动的悬架控制。
因此在高速行驶和复杂路况下,传统悬架系统的性能会受到一定的限制。
主动悬架控制方法则是通过悬架系统内置的传感器和控制单元,实时感知车辆的运动状态和路面情况,并根据这些数据来主动调节悬架系统的工作参数。
目前主动悬架系统主要采用以下几种控制方法:(1)电子控制电子控制是主动悬架系统的核心技术之一,通过悬挂系统内置的控制单元收集和处理来自传感器的数据,并根据预设的悬架调节算法来控制悬挂系统的工作状态。
在电子控制技术的支持下,主动悬架系统可以根据车辆当前的行驶状态和路况主动调节悬架硬度,提升行车舒适性和稳定性。
(2)气动控制为了实现对悬架系统的精准控制,主动悬架系统还需要配备一套高效的控制算法。
主动悬架控制算法的设计主要考虑以下几点:姿态控制是主动悬架系统的重要功能之一,通过感知车辆的侧倾角和纵向加速度来调节悬架系统的工作状态,提升车辆的稳定性和操控性。
(2)路面适应(3)悬挂硬度调节主动悬架系统在汽车领域具有广泛的应用前景,目前已经成为了豪华车和高端车型的标配。
概述汽车主动控制悬架系统的工作原理及控制模式

高速感应控制 车速 #/"$% & ’ 车 速 *" 0/"$% & ’ , 车 高 持 续 .(,) 以 上 大幅度变化 车 速 #/"$% & ’ , 车 高 持 续 .(,) 以 上 大 幅度变化
"$" """
""" "
连续坏路 面控制
0
0 ←0
车速与路面感应控制逻辑关系
悬架的刚度与阻尼 汽车行驶工况 “ 软”模式 “ 硬”模式 低 中 高 低 中 高 0
公共汽车
《城市公共交通》 " ! !##$
概述
汽车主动控制悬架系统
的 工作原理及控制模式
太原市公共交通总公司
摘 要 :主 动 控 制 悬 架 系 统 能 使 汽 车 乘 坐 舒 适 性 和 操 作 安 全 性
郭丽萍
( <)传感器。电子控制悬架系统传感器将汽车行驶的 路面状况和车速, 以 及起动、加速、转向、制动等工况转 变为电信号,输送给电子控制器。该系统所使用的传感器 见表 <。 表<
中图分类号: ’($)$$
文 章 编 号: "##*+"’(, ( !##$ ) #"+##",+#! 收 稿 日 期: !##!+#*+"#
C <B C
状态,在这两种不同的模式下,悬架由控制器控制在 三种状态,根据车速和路面的变化自动地调节刚度和 阻尼系数,使车身的振动达到最佳的控制。其逻辑关 系 见 表 .。 ( .) 车 身 姿 态 控 制 。 是 指 在 汽 车 车 速 突 然 改 变 及 转向等情况下,控制器对悬架的刚 度 和 阻 尼 实 施 控 制 , 以抑制车身的过度摆动,从而确保车辆乘坐舒适性和 操纵稳定性。其逻辑关系见表 ! 。 表!
浅析汽车主动悬架系统的发展和控制策略

・ 2 9・
浅析汽车主动悬架系统 的发展和控制策略
邱 亚 宇
摘
( 南京信 息职业技术 学院, 江苏 南京 2 1 0 0 4 6 ) 要: 介绍 了国内外汽 车主动 悬架控 制 系统发展和 主要控 制策略 , 重点论述 了汽车主动悬 架控制 系统的应用和发展 , 最后列举 了
目前 主 动 悬 架 的控 制 策 略 和 优 缺 点 。
关键词 : 主动悬架 ; 应用 ; 发展 ; 控 制策略
随着现代汽车对乘坐舒适 『 生 和行驶安全J 生的要求提高 ,设计一个 起步比较晚 其中上海交通大学、 清华大学 、 吉林大学和同济大学等科研 具有良好综合陛能的悬架成为现代汽车研究的一个重要课题。传统被 院所都开展了一些研究工作 ,对主动悬架进行 了一些理论研究和试验 动式悬架系统的弹『 生 元件其刚度和阻尼是固定值,在汽车行驶过程中 方法的研究 ,仍处于理论探索与数值模拟阶段 ,相应的试验验证比较 无法随路面状况 、 载荷和车速等因素的变化而变化。 由于悬架参数不可 少 , 还没有进入产品研制开发阶段。 北京理工大学的章一鸣教授较早地 改变 , 即使参数采用优化设计, 也只能对特定的激励具有最佳效果 , 一 对主动悬架进行了理论及试验研究。 该校高志彬 、 黄志刚等人进行 了可 旦激励发生变化 , 悬架 系统的减振效果很难维持最佳, 这一问题注定了 控减振器的性能试验研究 ,试验结果说咀昕 十的三级阻尼可调减振 被动式悬架系统的性能难以提高。近年来 , 随着计算机技术和各种控制 器 I 生 能优于传统的被动悬架。 方法 的发展 , 汽车主动悬架技术成为汽车技术研究的—个重要方向。 这 2主动悬架系统的控制策略 种主动悬架系统 ,可随汽车行驶状况而自适应地通过作动器控制悬架 汽车主动悬架的研究工作包含两个方面: 一方面是执行器的开发 , 动力响应 、 或 自动调节悬架的刚度和阻尼参数 , 具有优 良的减振性能 , 另一方面是控制策略的研究,两方面较好的配合才会使悬架系统的性 也有利于车辆的操纵稳定 I 生。 能达到理想的效果。 上世纪五十年代形成完整的经典控制理论, 采用频 1主 动悬 架 系统 国内外发 展状 况 率响应 法和根轨迹法这些 图解分析方法分析系统性能和设计控制装 在汽车悬架系统的发展史上 , 是1 9 5 4 年美 国 G M汽车公司的 E 置。历史的实践汪明经典控制理论十分有效的。 s p i e l L a b r o s s e 首次提出了主动悬架的概念。 雪铁龙早在 2 0 世纪 5 0 年 随着状态空间空间法的应用而出现的现代控制理论 ,它可以解决 代初期就将电控主动液压悬架装备在其 1 5车型上 , 但实现大规模的批 多输人多输出的多维空间系统 , 研究 的系统复杂性不断提高 , 其 已开始 量使用则是在稍后推出的 D S系列车型上Ⅲ 。 向智能控制方向发展 。目前应用于主动悬架系统的控制理论 比较多, 常 1 9 6 5 年, W. 0 . O b s o n 和k R  ̄ A l l e n 作了类似的研究工作。此后 , T . H . 见的控制方法主要有 以下 3 种: R o c h w e l l , S . K i mi c  ̄和 M . L a w t h e r 做了用伺服机构作为主动元件的理论 2 . 1 天棚阻尼控制。美 国著名控制专家 K a r n o p p 在二十世纪七十年 研究 。早期研究的主动悬架数学模型是不考虑非簧载质量和轮胎特l 生 代初提出了天棚阻尼的概念。这种方法的思想就是在车身上安装一个 的单 自由度系 统 。 与车身振动速度成正比的阻尼器,使阻尼器产生的力与车身竖直方向 1 9 7 6 年T h o mp s o n首先将全状态反馈最优控制理论应用于主动悬 的运动相抵抗 , 便可以Байду номын сангаас效地防止车身与悬架发生大的共振。 这种方法 架的研究中。1 9 8 4年他又利用部分状态反馈最优控制理论构造了次最 简单 , 所需要的车身传感器数量也较少 , 不需要非常复杂的悬架系统模 优反馈阵。 随后 , T h o m p s o n 和P e a r c e 把两个 自由度模型扩充到四个 型 , 实现起来 比较简单 。后来 k a r n o p p 又提出了开关阻尼的概念 , 这种 自由度模 型 。 方法是天棚阻尼的延伸 ,目前已被美 国通用汽车公司应用于某型号车 并取得了良好 的效果 。 1 9 8 6 年, R . M. C h a l a s s a n i 研究了整车模型 的行驶 I 生能。P . B a r a k和 上 , 2 . 2 智能控制。 近些年来智能控制取得了很大的发展 , 最有代表f 生 的 D . H r o v a t 用计算机模拟激励的方法, 比较 了主动悬架的优趱 陛。用性能 指数 1 I表示 主动 、 半主动 、 和被动 悬 架 的性能 。对 一组 特 定的 Ⅱ 加权 便是模糊控制和神经网络控制。模糊控制是由美国动控制理论专家扎 计算模拟的激励结果显示采用半主动悬架和主动悬架的车辆其各项指 德f L ^ A . z a d a h 艉 出来的, 通过一定的发展 , 模糊控制理论已经成为人们所 研究的一个热 门课题。在汽车悬架控制方面, Y o s h i m u r o 教授将模糊控 标多下降了很多。 1 9 5 5 年法 国 C i t r o e n 汽车公司研制出一种液压一空气悬架系统 , 制理论首先应用到汽车主动和半主动悬架 中。汽车悬架可以看作是用 可以使汽车具有较好 的行驶平顺性和乘坐舒适性 ,由于它的制造工序 组非线 『 生 微分方程来描述的非线性系统 ,利用模糊推理方法可推导 过于复杂 , 最终未能普及。1 9 8 2 年美国 L O T U S 汽车公 司研制出有源主 出合适的阻尼力 ,实验结果显示采用模糊控制理论设计的控制器可使 动悬架系统 ,瑞典 V O L V O汽车公 司在其车上安装 了实验 f 生的 L O T U S 主动悬架的性能得到有效提高 , 提高了汽车行驶的平顺性 。 模糊控制和 主动悬架系统。1 9 8 3年 日 本T O Y O T A汽车公司在 S o a r e 轿车上采用了 神经网络控制能够为特殊条件下的模型处理问题提供有效的方法 。可 阻尼可调的减振器。1 9 8 6年丰 田又在 S o a r e 车型采用了能分别对阻尼 以认为智能控制将是 2 1 世纪控制领域 的核心技术 , 智能控制的发展必 和刚度进行三级调节的空气悬架 , 1 9 8 9年 T O Y O T A在 C e l i c a 车型上装 将推动科技的发展, 从而对社会进步的推动力是不可估量 的。 置了真正意义上的主动油气悬架系统 福特汽车公司在 1 9 8 4年底的 2 . 3 混合控制。 当前用于汽车悬架振动的控制策略比较多, 单一控制 L i n c o l n C o n t i n e n t a l 车上 装 备 了电控 空气 悬架 系 统 , 可 以有效 地实 现 隔 策略可以使某一控制 目标达到理想的效果 ,但很难达到多个控制 目标 振 和高 度调 整 。 同时满足要求 的要求。因为各种控制策略都有 自身无法弥补的缺陷 , 考 1 9 8 8年雪铁龙公 司正式将装备有液压悬架的 X M车型正式命名 虑到一方面则往往另一面就会有损失 。因此常将多种控制方法结合起 为第一代主动液压悬架系统,之后雪铁龙又在其生产的 X A N T I A系列 来对悬架系统进行混合控制 ,例如将模糊控制和神经网络控制混合设 车型装置了第二代主动液压悬架, 这一代新型主动悬架大大地提高 E — 计 应用于奔驰高级轿车和重型坦克,这种混合控制策略同样适用于汽 C U控制单元的计算速度 , 同时有运动和舒适两种模式可供选择。到 目 车主动悬架这样复杂的非线性系统 ,仿真结果显示均能取得 良好的效 前为止,雪铁龙的主动液压悬架已发展到第三代 ,并装备于其 c 5 、 c 6 果 , 从长远来看 , 混合控制方法将是今后悬架控制策略研究的一个很重 系列车型上。 其第四代主动液压系统也在研发 当中 [ 3 1 。 2 0 世纪 9 0 年代 要 方 向。 日本 N I S S A N汽车公司在 I n i f n i t e Q 4 5 轿车上也装备了液压主动悬架。 参考文献 此外 , 德国 P o r s c h e 、 美国F o r d , 德国 B e n z 、 通用、 克莱斯勒 、 雪铁龙 [ 1 Ⅱ .E s k i ,S . Y i d i r i m .V i b r a t i o n C o n t r o l o f V e h i c l e A c t i v e S u s p e n s i o n s t e m Us i n g a Ne w Ro b u s t N e u r a l Ne t w o r k C
211072071_车载视觉感知预瞄下的主动悬架控制分析与实车应用(一)
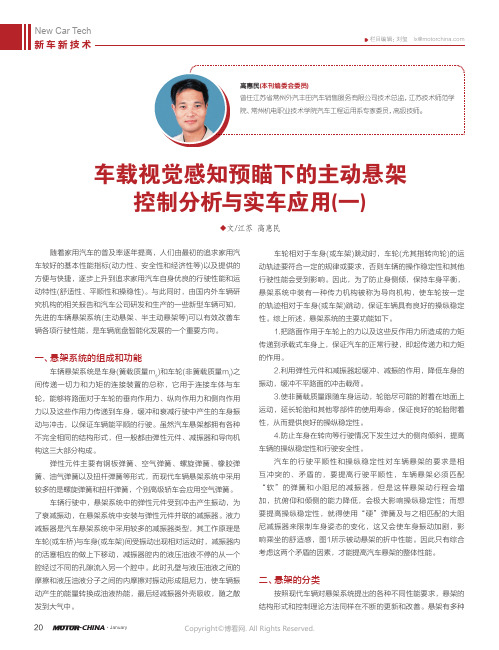
文/江苏 高惠民车载视觉感知预瞄下的主动悬架随着家用汽车的普及率逐年提高,人们由最初的追求家用汽车较好的基本性能指标(动力性、安全性和经济性等)以及提供的方便与快捷,逐步上升到追求家用汽车自身优良的行驶性能和运动特性(舒适性、平顺性和操稳性)。
与此同时,由国内外车辆研究机构的相关报告和汽车公司研发和生产的一些新型车辆可知,先进的车辆悬架系统(主动悬架、半主动悬架等)可以有效改善车辆各项行驶性能,是车辆底盘智能化发展的一个重要方向。
一、悬架系统的组成和功能车辆悬架系统是车身(簧载质量m s )和车轮(非簧载质量m t )之间传递一切力和力矩的连接装置的总称,它用于连接车体与车轮,能够将路面对于车轮的垂向作用力、纵向作用力和侧向作用力以及这些作用力传递到车身,缓冲和衰减行驶中产生的车身振动与冲击,以保证车辆能平顺的行驶。
虽然汽车悬架都拥有各种不完全相同的结构形式,但一般都由弹性元件、减振器和导向机构这三大部分构成。
弹性元件主要有钢板弹簧、空气弹簧、螺旋弹簧、橡胶弹簧、油气弹簧以及扭杆弹簧等形式,而现代车辆悬架系统中采用较多的是螺旋弹簧和扭杆弹簧,个别高级轿车会应用空气弹簧。
车辆行驶中,悬架系统中的弹性元件受到冲击产生振动,为了衰减振动,在悬架系统中安装与弹性元件并联的减振器。
液力减振器是汽车悬架系统中采用较多的减振器类型,其工作原理是车轮(或车桥)与车身(或车架)间受振动出现相对运动时,减振器内的活塞相应的做上下移动,减振器腔内的液压油液不停的从一个腔经过不同的孔隙流入另一个腔中。
此时孔壁与液压油液之间的摩擦和液压油液分子之间的内摩擦对振动形成阻尼力,使车辆振动产生的能量转换成油液热能,最后经减振器外壳吸收,随之散发到大气中。
高惠民(本刊编委会委员)曾任江苏省常州外汽丰田汽车销售服务有限公司技术总监,江苏技术师范学院、常州机电职业技术学院汽车工程运用系专家委员,高级技师。
车轮相对于车身(或车架)跳动时,车轮(尤其指转向轮)的运动轨迹要符合一定的规律或要求,否则车辆的操作稳定性和其他行驶性能会受到影响。
汽车悬挂系统的主动控制研究

汽车悬挂系统的主动控制研究【摘要】汽车悬挂系统是汽车重要的组成部分,对行车安全和舒适性起着至关重要的作用。
随着科技的进步,主动控制技术在汽车悬挂系统中的应用也逐渐受到关注。
本文从现状分析入手,介绍了汽车悬挂系统的发展历程和主动控制技术的应用。
接着详细探讨了基于传感器和控制算法的汽车悬挂系统主动控制方法,并通过案例分析展示了其实际效果。
展望了主动控制技术在汽车悬挂系统中的应用前景,并提出了未来研究方向。
本文旨在为汽车悬挂系统的主动控制研究提供参考,促进相关技术的发展与应用。
【关键词】汽车悬挂系统、主动控制、传感器、控制算法、研究案例分析、应用前景、未来研究方向、总结1. 引言1.1 背景介绍汽车悬挂系统是车辆中至关重要的一个部分,它直接影响着行驶的舒适性、稳定性和安全性。
随着汽车科技的不断发展,传统的被动悬挂系统已经不能满足人们对行驶质量的需求。
越来越多的汽车制造商开始研究和开发主动悬挂系统,以提高汽车的操控性能和舒适度。
传统的被动悬挂系统只能根据路面的不平整程度对汽车进行阻尼调节,无法根据车辆的实际情况进行有效的调整。
而主动悬挂系统则可以通过实时监测车辆的动态参数,根据行驶状态和路况进行主动调控,从而使车辆在行驶过程中保持最佳的悬挂状态。
主动悬挂系统的研究和应用已经取得了一定的成果,但在实际应用中仍存在一些挑战和问题,如成本高昂、能耗大等。
对汽车悬挂系统的主动控制研究具有重要的理论和实践意义,有助于提高汽车的行驶性能和安全性,同时也可以为未来的汽车智能化发展提供重要参考。
1.2 研究意义汽车悬挂系统是汽车重要的组成部分,直接影响到车辆的行驶稳定性、舒适性和安全性。
随着科技的发展,主动控制技术在汽车悬挂系统中得到了广泛应用,可以实现对悬挂系统的实时调节和控制,提高车辆的操控性能。
研究汽车悬挂系统的主动控制具有重要的意义。
通过研究主动控制技术在汽车悬挂系统中的应用,可以提高车辆的行驶稳定性。
主动控制技术能够根据路面情况和驾驶需求自动调节悬挂系统,使车辆在高速行驶、急转弯等场景下更加稳定,减少侧倾和飘逸现象,提高乘车舒适度。
车辆主动悬架最优控制

图 1. q1=3.35E5 ,q2 =40.5E5 的幅频特性图 由图 1 可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相 似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化 平缓, 主动悬架的减振性能较为突出; 在高频固有频率附近, 主动悬架的响应幅值变化较大 。 可知取该组权系数时,主动悬架的减振性能的改善程度不够理想; 2) 取 q1=3.35E8,q2 =40.5E8 时,由程序得 k1 =63640;k2=4863;k3 =-36146;k4 =-904;及 系统的传递函数和幅频特性,绘制幅频特性图 %主动悬架 q1=3.35e8;q2=40.5e8 时的仿真程序: m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8; A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0]; B=[0;1/m2;0;-1/m1];D=[0;0;1;0]; C=[0 0 0 0;1 0 0 0;0 0 1 0]; E=[1/m2;0;0];H=[0;0;0]; Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1]; [K,P,F]=lqr(A,B,Q,R) M=A-B*K; N=C-E*K; G=ss(M,D,N,H); G1=tf(G) i=1; for s=0:0.1:80 s=s*2*pi*j; G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);
(完整word版)基于Matlab的汽车主动悬架控制器设计与仿真
《现代控制理论及其应用》课程小论文基于Matlab的汽车主动悬架控制器设计与仿真学院:机械工程学院班级:XXXX(XX)姓名:X X X2015年6月3号河北工业大学目录1、研究背景 (3)2、仿真系统模型的建立 (4)2.1被动悬架模型的建立 (4)2.2主动悬架模型的建立 (6)3、LQG控制器设计 (7)4、仿真输出与分析 (8)4.1仿真的输出 (8)4.2仿真结果分析 (11)5、总结 (11)附录:MATLAB程序源代码 (12)(一)主动悬架车辆模型 (12)(二)被动悬架车辆模型 (14)(三)均方根函数 (15)1、研究背景汽车悬架系统由弹性元件、导向元件和减振器组成,是车身与车轴之间连接的所有组合体零件的总称,也是车架(或承载式车身)与车桥(或车轮)之间一切力传递装置的总称,其主要功能是使车轮与地面有很好的附着性,使车轮动载变化较小,以保证车辆有良好的安全性,缓和路面不平的冲击,使汽车行驶平顺,乘坐舒适,在车轮跳动时,使车轮定位参数变化较小,保证车辆具有良好的操纵稳定性。
(a)被动悬架系统(b)半主动悬架系统(c)主动悬架系统图1 悬架系统汽车的悬架种类从控制力学的角度大致可以分为被动悬架、半主动悬架、主动悬架3种(如图1所示)。
目前,大部分汽车使用被动悬架,这种悬架在路面不平或汽车转弯时,都会受到冲击,从而引起变形,这时弹簧起到了减缓冲击的作用,同时弹簧释放能量时,产生振动。
为了衰减这种振动,在悬架上采用了减振器,这种悬架作用是外力引起的,所以称为被动悬架。
半主动悬架由可控的阻尼及弹性元件组成,悬架的参数在一定范围内可以任意调节。
主动悬架是在控制环节中安装了能够产生上下移动力的装置,执行元件针对外力的作用产生一个力来主动控制车身的移动和车轮受到的载荷,即路面的反作用力。
随着电控技术的发展,微处理器在车辆中的应用已经日趋普遍,再加上作动器、可调减振器和变刚度弹簧等重大技术的突破,使人们更加注对主动悬架系统的研究。
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
《基于智能控制的汽车主动悬架控制策略研究》范文
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,人们对汽车行驶的平稳性、安全性和舒适性要求越来越高。
汽车主动悬架系统作为提高汽车行驶性能的关键技术之一,其控制策略的研究显得尤为重要。
传统的被动悬架系统已经无法满足现代汽车的需求,而基于智能控制的主动悬架系统则能够更好地适应复杂的道路环境,提高汽车的行驶性能。
本文旨在研究基于智能控制的汽车主动悬架控制策略,为汽车悬架系统的设计和优化提供理论依据。
二、智能控制技术概述智能控制技术是一种基于人工智能、计算机技术和控制理论的技术,具有自适应、自学习和优化的特点。
在汽车主动悬架系统中,智能控制技术可以实现对车辆行驶状态的实时监测和调整,提高车辆的行驶稳定性和舒适性。
目前,常见的智能控制技术包括模糊控制、神经网络控制、遗传算法控制等。
三、汽车主动悬架系统概述汽车主动悬架系统是一种能够根据道路条件和车辆行驶状态实时调整悬架参数的系统。
与传统的被动悬架系统相比,主动悬架系统具有更好的适应性和控制性,能够更好地提高车辆的行驶性能。
主动悬架系统主要由传感器、控制器和执行器等部分组成,其中控制器是整个系统的核心。
四、基于智能控制的汽车主动悬架控制策略研究4.1 模糊控制策略模糊控制是一种基于模糊逻辑的控制方法,具有较好的鲁棒性和适应性。
在汽车主动悬架系统中,模糊控制可以根据传感器采集的车辆状态信息,通过模糊推理方法对悬架参数进行调整,实现对车辆行驶状态的优化。
研究表模糊控制策略可以有效地提高车辆的平稳性和安全性。
4.2 神经网络控制策略神经网络是一种模拟人脑神经元工作的计算模型,具有自学习和自适应的能力。
在汽车主动悬架系统中,神经网络控制可以通过学习大量的驾驶数据,自动调整悬架参数,实现对车辆行驶状态的优化。
研究表明,神经网络控制策略可以更好地适应不同的道路环境和驾驶需求。
4.3 遗传算法控制策略遗传算法是一种模拟自然进化过程的优化算法,具有全局搜索和优化能力。
主动悬架控制器算法及应用
轻 型汽 车技 术
21 ( ) 22 02 4 总 7
技 术纵横
1 3
直 接 控 制算 法 仅 需 测 量 悬 架 的相 对 速 度 和 相 对 位
广泛应用。 hm s 首先将随机最优控制理论应用 T o po n 于主动悬架 的研究 , 对线性最优控制算法有 以下几 点要求 :
F 一 主动悬架作用力 为 了使簧载质量具有理想 的隔振效果 ,只要主
动力 F 与被 动力 F 的大小 相 同 , 向相 反 , : 。 方 即
F= F= x+ x .- pk x 0 C(一 t (- x ) ( 2)
就可以完全消除簧载质量与非簧载质量之间的 耦合 效 应 , 为达 到理想 的隔振 效果 , 利用 直接 控 N(1 2 式, 得到 单轮 悬架 闭环系统 方 程为 :
好坏 , 对汽车的使用性能影响很大 。 悬架 弹性 系数 对行 驶平顺 性 的影 响 :当 弹性 系 数过大时, 悬架 的减振性能减弱 , 轮胎的振动直接传 递 到车 身 ;当弹性 系数 过小 时悬 架 系统 的 固有 振 动
频率 接 近路 面 的激 励频 率 , 容易 引起 车身共 振 。 阻 尼对 汽车 行驶平 顺 性 的影 响 :为衰 减 车身 的
尼 系数 。
这 种 算 法 的设 计 实 际 上是 滤波 器 结 构 的设 计
和滤波器上 下频率 的选择 。一般结论是上 限频率 高, 悬架对路面冲击的隔振效果好 , 但悬架 的动挠 度增 加 , 胎 的接 地 性能 差 , 之亦 然 , 限 频 率影 轮 反 下
2 可控 悬架
从上述分析我们知道悬架刚度、阻尼系数等悬 架 系统 的各项参 数 对车 辆 的行驶平 顺 性和操 纵 稳定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
##
<
##
H]
T
外部激励为
zv = [ z v1
z
c v
1
z v2
z
c v2
z v3
z
c v
3
z v4
z
c v
4
]
T
故, 该 9 自由度的设计模型可用状态方程表示为
x# = Ax + Bu + Ez v
y = Cx
09@ 9 I9@ 9 A=
A0 B0
09 @ 9 B=
Q
0 12 @ 8 E=
M
a11 0 0 a14 0 0 a17 0 0 0 a22 0 a24 0 0 a27 0 0 0 0 a33 0 0 a36 0 0 a39 a41 a42 0 a44 0 0 0 0 0 A0 = 0 0 0 0 a55 0 0 0 0 0 0 a63 0 0 a66 0 0 0 a71 a72 0 0 0 0 a77 a78 0 0 0 0 0 0 0 0 a88 0 0 0 a93 0 0 0 0 0 a99 b11 0 0 b14 0 0 b17 0 0 0 b22 0 b24 0 0 b27 0 0 0 0 b33 0 0 b36 0 0 b39 b41 b42 0 b44 0 0 0 0 0 B0 = 0 0 0 0 b55 0 0 0 0 0 0 b63 0 0 b66 0 0 0 b71 b72 0 0 0 0 b77 b78 0 0 0 0 0 0 0 0 b88 0 0 0 b93 0 0 0 0 0 b99
图 2 单节车辆垂向分析模型 Fig. 2 V ert ical anal ysis model of s ingal rail vehi cle
图 3 单节车辆侧滚分析模型 Fig. 3 R ol ling analys is model of sin gal rail vehicle
为节省篇幅, 该设计模型的 9 个自由度的振动 方程就不一一列出, 下面采用状态方程来描述该系
中由于存在着一定的响应滞后, 很难对反馈信号及
时产生足够大的控制力, 从而限制了系统的主动隔 振效果, 因而在该模型中, 预先通过某种传感器( 如
超声波传感器或红外线传感器) 测定未来的目标信
号或外扰, 系统在决定控制指令时, 不仅考虑系统当 时的状态, 而且还可以根据已确认的未来目标值和
外扰信息的变化趋势作出即时的控制决策, 称这种
际的车辆系统上会产生
较大的系统误差, 甚至 会使主动控制失效。为
此本文提出了车辆悬挂
最优预见控制模型。该
图 1 传统分析模型
模型与传统的简化模型 Fig. 1 Tradit ional analysis model
相比, 增加了轮对的激励数, 充分考虑了一系、二系的
众多垂向阻尼和弹簧刚度, 使得系统的设计模型更加
1/ M 1/ M 1/ M 1/ M
0
0
0
0
0
0
0
0
- l/ I < - l/ I < l / I <
l/I<
0
0
0
0
0
0
0
0
- b/ J H b/ J H - b/ J H b / J H
0
设定目标预见步数提前作出响应, 由此验证了最优预见控制在复杂多自由度的车辆主动悬挂设计
模型中应用的可行性和有效性。
关键词: 车辆工程; 多自由度; 主动悬挂; 最优预见控制
中图分类号: U 2701 32
文献标识码: A
Optimum- preview control model of rail vehicle active suspension
精确化, 在不过分的提高系统阶次的情况下, 设计模 型更加接近车辆的实际系统。同时, 由于该设计模型
同样地避开了复杂的轮轨蠕滑力模型[ 4] , 其横向模型
在只考虑了车体、前、后转向架侧滚的情况下( 共 3 个 自由度) , 略去了横移、摇头等自由度, 而垂向模型则
考虑了车体浮沉、点头( 1 @ 2) , 及前后转向架浮沉、点
收稿日期: 2005-05-15 基金项目: 教育部科技研究重点项目( 01131) 作者简介: 朱 浩( 1972- ) , 男, 湖南株洲人, 中南大学博士研究生, 从事车辆主动减振技术与智能控制策略研究.
第3期
朱 浩, 等: 车辆主动悬挂最优预见控制模型
9
棒性降低, 因此根据此
模型设计的控制器在实
朱 浩1, 刘少军1, 邱显焱2
( 11 中南大学 机电工程学院, 湖南 长沙 410083; 21 株 洲工学院 机械系, 湖南 株洲 412000)
摘 要: 以复杂多自由度的车辆系统设计模型代替传统的简化模型, 建立了主动悬挂控制车辆系统 模型, 设计了最优预见控制器, 研究了车体的浮沉、点头、侧滚 3 种运动状态在加控制和未加控制时
第5卷 第3期 2005 年 9 月
交通运输工程学报
Journal of T raffic and T ransport ation Engineering
Vo l1 5 No1 3 Sept . 2005
文章编号: 1671-1637( 2005) 03-0008- 06
车辆主动悬挂最优预见控制模型
控制决策为预见控制。它在形式上属于最优控制,
所以也可称为最优预见控制策略。用该控制方法作
为主动悬挂的控制策略, 以期弥补因系统能源的沿
程损失和元件的响应滞后使得减振效果不明显, 提
高控制质量, 降低系统控制能量的峰值, 减少能量消
耗, 达到理想的控制效果。
1 车辆系统模型
在建立单节车辆原理模型时选择四轴车为研究 对象, 考虑到建模的方便性可将其分解为垂向模型和 横向模型分别建立其动力学方程。在这里假设: 一系 悬挂的所有弹簧刚度均为 k1 , 阻尼刚度均为 c1; 二系 悬挂的所有弹簧刚度均为 k2 , 阻尼刚度均为 c2 。
头( 2 @ 2) , 共 6 个自由度的运动, 因此, 本研究中用于
设计主动悬挂控制器的单节车辆系统的设计模型共
考虑了 9 个自由度。这种设计的好处是将该设计模
型的控制器接入实际系统后, 能使设计模型和实际系
统的动态稳定性能更加接近。
系统模型的复杂化导致了与之对应的实验系统
的复杂程度也提高了, 众多的元件在实时控制过程
的路面激扰响应。仿真计算结果表明在最优控制下车体的浮沉响应降低了 27% , 点头响应降低了
30% , 侧滚响应降低了 30% ; 在预见控制二次加权矩阵的作用下, 车体的浮沉响应降低了 54% , 点
头响应降低了 50% , 侧滚响应降低了 45% ; 根据预见控制的提前预见可适时响应的特点, 系统可按
0引言
传统的用于主动悬挂控制器设计的车辆系统模 型( 简称车辆设计模型, 一般采用四自由度二轴车的 结构来建模) 的构建思路主要是为了避开复杂的数
学建模而消极地选择用一个只具有类似行为的低阶 系统去逼近一个高阶系统[ 1~ 3] , 其模型结构见图 1。 这种设计思路的好处是模型结构简单, 易于在简化 的试验台架上实现; 缺点是由于模型做了降阶处理, 从而使得实际控制系统的稳定性和性能二者之间鲁
Abstract: Based o n t he design model of mult-i deg rees of freedom , a new modelling method of rail vehicle sy st em w ith act ive suspensio n w as put f orw ard, a kind of opt im um- preview cont ro ller w as designed to r est rain t he vert ical vibrat io n, no dding and ro lling of carbody, t he system respo nd w it h contr oller w as analy sed. Sim ulat ion result s indicat e t hat t he vert ical v ibrat io n, nodding and rolling levels of carbody are reduced by about 27% , 30% , 30% respectively using opt im um cont rol met ho d, and t he levels o f carbody are r educed by about 54% , 50% , 45% respect iv ely using preview cont rol met hod, preview cont rol strat egy can m ake vehicle system r espond ahead acco rding to t arget value. It is f easible t hat t he optimum- pr ev iew contro ller is used in desig nning the active suspension of rail v ehicle system based on complex mult-i deg rees of f reedom model. 1 t ab, 15 f igs, 8 refs. Key words: vehicle engineering; mult-i degrees of freedom; active suspension; optimum- preview control Author resume: Zhu H ao( 1972- ) , male, doct oral st udent , 86- 731- 8832710, zhu1201_1@ 163. com.