线性定常连续系统离散化的一种简单方法
线性定常连续系统的离散化
线性定常连续系统的离散化(6/10)
线性定常连续系统状态空间模型的离散化, 实际上是指在采 样周期T下, 将状态空间模型 x Ax Bu y Cx Du 变换成离散系统的如下状态空间模型:
e 2T
H (T )
T
(t)dt B
0
T 1 0 0
0.5(1 e2tபைடு நூலகம்e2t
)dt
0 1
1 4
2T (1 e2T
2(1 e2T )
)
于是该连续系统的离散化状态方程为
1 (1 e2T )/2
T/2 (1 e2T )/4
x(k 1) 0
e 2T
x(k)
(1 e2T )/2
线性定常连续系统的离散化(7/10)
连续系统的状态方程的求解公式如下:
t
x(t) Φ(t t0 )x(t0 )
Φ(t τ
t0
)Bu(τ
)dτ
➢ 现在只考虑在采样时刻t kT和t (k1)T时刻之间的状 态响应, 即对于上式, 取t0 kT, t (k1)T, 于是
(k 1)T
x((k 1)T ) Φ(T )x(kT ) Φ[(k 1)T τ ]Bu(τ )dτ kT
线性定常连续系统的离散化(3/10)
下图所示为连续系统化为离散系统的系统框图
u(t) 保持器
连续系统 y(t)
x(t)
x(k) u(k)
数字 D/A 计算机 A/D
连续系统离散化的实现
采样 y(k)
线性定常连续系统的离散化(4/10)
现代控制原理2-3离散系统
−T −T
−T
)
−T
z 2 − (1 + e −T ) z + e −T
)
0 x( k + 1) = −T -e
0 x ( k ) + u( k ) −T 1+ e 1 1
y( k ) = 1 − e −T − Te − T
T − 1 + e −T x( k )
x(k+1) = [I +TA]x(k) + TBu(k) G = I +TA H =TB
17
0 1 0 & 的近似离散化方程。 例2-13 求 x = x + 1 u 的近似离散化方程。 0 −2
解: G = I + TA = 1 0 + 0 − T = 1 − T 0 1 0 − 2T 0 1 − 2T
x( k + 1) = G ( k ) x( k ) + H ( k )u( k ) y( k ) = C ( k ) x ( k ) + D( k )u( k )
2
2.结构图 2.结构图
3
3.差分方程和脉冲传递函数与离散状态空间表 3.差分方程和脉冲传递函数与离散状态空间表 达式之间的转换 在单变量离散系统中, 在单变量离散系统中,数学模型分为差分方程 和脉冲传递函数两类, 和脉冲传递函数两类,它们与离散状态空间表达式 之间的变换,和连续系统分析相类似。 之间的变换,和连续系统分析相类似。 离散 差分方程 连续 D.E
x1 ( k ) y ( k ) = [1 −4 ] + u( k ) x2 ( k )
2.3线性连续时间状态空间表达式的离散化
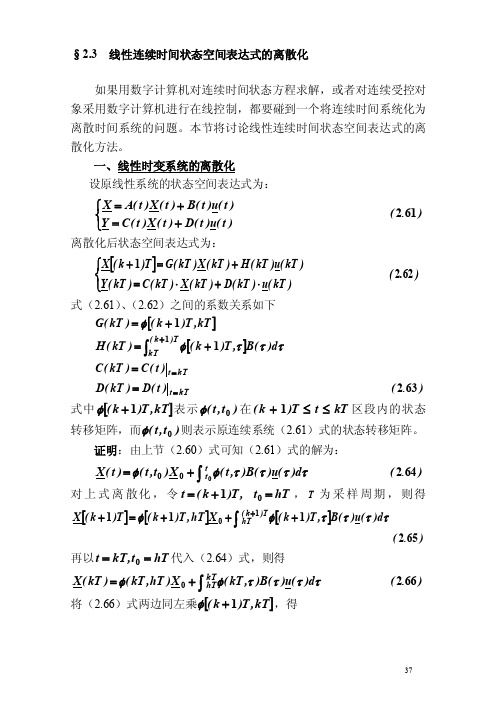
§2.3 线性连续时间状态空间表达式的离散化如果用数字计算机对连续时间状态方程求解,或者对连续受控对象采用数字计算机进行在线控制,都要碰到一个将连续时间系统化为离散时间系统的问题。
本节将讨论线性连续时间状态空间表达式的离散化方法。
一、线性时变系统的离散化 设原线性系统的状态空间表达式为:).()t (u )t (D )t (X )t (C Y )t (u )t (B )t (X )t (A X612⎩⎨⎧+=+=离散化后状态空间表达式为:[]).()kT (u )kT (D )kT (X )kT (C )kT (Y )kT (u )kT (H )kT (X )kT (G T )k (X 6221⎩⎨⎧⋅+⋅=+=+式(2.61)、(2.62)之间的系数关系如下[][]).()t (D )kT (D )t (C )kT (C d )(B ,T )k ()kT (H kT ,T )k ()kT (G kTt kT t T)k (kT632111==+==+=+=⎰τττφφ式中[]kT ,T )k (1+φ表示)t ,t (0φ在kT t T )k (≤≤+1区段内的状态转移矩阵,而)t ,t (0φ则表示原连续系统(2.61)式的状态转移矩阵。
证明:由上节(2.60)式可知(2.61)式的解为:).(d )(u )(B ),t (X )t ,t ()t (X t t 642000ττττφφ⎰+=对上式离散化,令hT t ,T )k (t =+=01,T 为采样周期,则得[][][]).(d )(u )(B ,T )k (X hT ,T )k (T )k (X T )k (hT65211110ττττφφ+++=+⎰+再以hT t ,kT t ==0代入(2.64)式,则得 ).(d )(u )(B ),kT (X )hT ,kT ()kT (X kT hT 6620ττττφφ⎰+=将(2.66)式两边同左乘[]kT ,T )k (1+φ,得[][][][][]).(d )(u )(B ,T )k (X hT ,T )k (d )(u )(B ),kT (kT ,T )k (X )hT ,kT (kT ,T )k ()kT (X kT ,T )k (kT hT kT hT 6721111100ττττφφττττφφφφφ+++=++⋅+=+⎰⎰将(2.65)式减去(2.67)式得:[][][]).(d )(u )(B ,T )k ()kT (X kT ,T )k (T )k (X T )k (kT 6821111ττττφφ+++=+⎰+上式中,令[][]τττφφd )(B ,T )k ()kT (H kT ,T )k ()kT (G T)k (kT⎰+=+=+111设在区间[]T )k (,kT 1+内,)kT (u )(u =τ,则(2.68)式可简写成: [])kT (u )kT (H )kT (X )kT (G T )k (X ⋅+⋅=+1 同时,对(2.61)式输出方程离散化,则证明了)kT (u )kT (D )kT (X )kT (C )kT (Y ⋅+=二、线性时不变系统的离散化 对于线性时不变系统).(uD X C Y u B X A X692⎩⎨⎧+=+=离散化状态空间表达式为).()kT (u D )kT (X C )kT (Y )kT (u )T (H )kT (X )T (G T )k (X 7021⎩⎨⎧+=+=+其中D ,C ),T (H ),T (G 均为常数阵,且).(B)d e ()T (H e)T (G A T AT 7120⎪⎩⎪⎨⎧==⎰ττ证明:由于时不变系统是时变系统的一种特殊情况,所以只需要证明式(2.71)成立即可。
连续系统的状态变量方程求解

连续系统的状态变量方程求解连续系统的状态变量方程求解通常采用数值方法,例如龙格-库塔法(Runge-Kutta)等。
在这个过程中,需要将连续系统的状态方程离散化,即将连续时间步长的微分方程转化为离散时间步长的离散方程。
求解离散方程可采用递推的方式,根据系统的初始条件和上一时刻的状态变量值,计算出当前时刻的状态变量值。
以下是一个求解连续系统状态变量方程的步骤:1. 确定连续系统的状态变量方程。
例如,给定线性定常系统dx/dt = Ax + Bu,其中x为状态变量,A和B为系统矩阵。
2. 离散化。
将状态变量方程转化为离散方程。
常见的离散化方法有前项差分变换、后项差分变换和Tustin变换。
具体变换方法取决于系统的特性以及所需的数值稳定性和精度。
例如,使用Tustin变换将连续系统离散化,得到离散状态方程x[k+1] = A*x[k] + B*u[k]。
3. 初始化。
给定初始条件,如x[0] 和u[0],初始化状态变量值。
4. 数值求解。
使用数值方法(如龙格-库塔法)递推计算离散方程,得到一系列状态变量值x[1], x[2], ...,以及对应的输出值y[1], y[2], ...。
5. 分析结果。
根据求解得到的状态变量值和输出值,分析系统的性能,如稳定性、收敛速度等。
在MATLAB中,可以使用ode45等函数求解连续系统的状态变量方程。
以下是一个简单的示例:```MATLAB定义系统矩阵A、B和输入信号uA = [1 0; -1 1];B = [0 1];u = [1; 0.5];定义初始条件x0 = [1; 2];设置求解参数tspan = [0, 10];options = odeset('RelTol', 1e-6, 'AbsTol', 1e-6);求解状态变量方程[x, u] = ode45(@(t, x) A*x + B*u, tspan, x0, options);绘制状态变量曲线figure;plot(t, x(:, 1), 'b', 'LineWidth', 2);hold on;plot(t, x(:, 2), 'r', 'LineWidth', 2);xlabel('Time');ylabel('State Variables');legend('x1', 'x2');```这个示例中,我们使用ode45函数求解了一个线性定常系统在给定输入信号下的状态变量演化。
连续系统的离散化方法课件
离散化方法的意义
精确性
离散化方法可以提供对连续系统的精 确近似,特别是在计算机仿真和数字 控制系统中。
可计算性
离散化方法可以将不可计算的分析转 化为可计算的形式,便于进行数值计 算和控制器设计。
离散化方法的应用场景
01
02
03
数字控制
在数字控制系统中,连续 系统的离散化是必要的步 骤,以便在数字计算机上 进行数值计算和控制。
小波基选择
常用的小波基包括Haar小波、Daubechies小波、Morlet 小波等。
误差分析
小波变换法的误差主要来自于变换误差和离散化误差。
05
离散化方法的评估与优化
评估离散化方法优劣的标准
01
02
03
04
精度
离散化方法是否能准确代表原 连续系统。
稳定性
离散化方法在一定参数变化范 围内是否能保持稳定。
状态空间模型
用状态变量和输入、输出变量描述连续系统的动态特性。
状态空间模型通常形式为:`x'(t) = Ax(t) + Bu(t)` 和 `y(t) = Cx(t) + Du(t)`,其中 `x(t)` 表 示系统状态,`u(t)` 表示系统输入,`y(t)` 表示系统输出,`A`, `B`, `C`, `D` 是系数矩阵。
化率。
通过求解 ODE,可以得到系统 在任意时刻的状态。
传递函数
表示连续系统在输入和输出之间的传递 特性。
传递函数通常形式为:`G(s) = Y(s) / U(s)`,其中 `Y(s)` 和 `U(s)` 分别是输 出和输入的拉普拉斯变换,`s` 是复变
量。
通过分析传递函数的零点、极点和增益 ,可以得到系统的稳定性和性能特性。
连续时间系统状态方程的离散化

1 −2T 1/ 2(1−e ) 4(2T+e −1) dt= 1 −2t e (1−e−2T) 2
说明:(1)当T选定后(如T=0.5秒)G(t)和 H(t)都是确定的系数矩阵 (2)离散化后得状态方程,可按递推法或 Z变换法求出解
x(k ) = Φ (k ) x(0) + ∑ Φ (k − j − 1) Hu ( j )
2.6
连续时间系统状态方程的离散化 -需先将其状态方程化为离散方程
(1)用计算机对连续时间系统状态方程求解
(2)对连续受控对象进行计算机在线控制 -受控对象模型离散化
ɺ x = Ax + Bu y = Cx
假设:(1)t=kT,T为采样周期,且很 小,k=0,1,2…为一正整数 (2)u(t)只在采样时离散化,即在 kt≤t≤(k+1)T,u(t)=u(kT)=常数,0阶保持 一、线性定常系统状态方程的离散化 -(按非齐次状态方程解,求出) 线性定常系统状态方程的解为: t x ( t ) = Φ ( t − t 0 ) x ( t 0 ) + ∫ Φ ( t − τ)Bu (τ)dτ
方法1、线性定常系统离散化
1 1− e−t (1)a、e = L [sI − A] = −t 0 e −T ∗ AT 1 1− e b、G (t) = e = −T 0 e T + e−T −1 T AT T 1 1− e−t 0 ∗ c、H (T)∫0 e Bdt= ∫0 −t 1dt = −T 0 e 1− e d、x[(k +1)T] = G∗(T)x(kT) + H∗(T)u(kT) 1 1− e−T x1(kT) T + e−T −1 = −T x (kT) + −T u(kT) 1− e 0 e 2
计算机仿真技术基础第4章 连续系统模型的离散化处理方法

第四章 连续系统模型的离散化处理方法
第一节 第二节 第三节 替换法 离散相似法 根匹配法
4.1
替换法
传递函数是控制系统应用最广泛的模型描述 形式,连续系统为S域的传递函数G(S),离散系 统为Z域的脉冲传递函数G(Z)。
替换法的基本思想:对给定的连续系统模型 G(S) ,设法找到S域到Z域的某种映射关系,将 S域的变量映射到Z平面上,由此得到与连续系 统G(S)相对应的离散系统的脉冲传递函数G(Z)。 然后,再由G(Z)通过Z反变换得到系统的时域离 散模型——差分方程,从而快速求解。
C C C D D C Z e T Z Y (Z ) A A A B B A U(Z ) Z e T
D C D C T Z e B A B A Z e T
Z反变换得差分方程:
y(n 1) e
计算机仿真技术基础
第四章
连续系统模型 的离散化处理方法
第三章的数值积分方法较成熟,计算精度高, 但算法复杂,计算量大。在一些要求速度较高的 实时仿真或计算机控制系统中实现数字控制器算 法,就跟不上速度的要求,就需要一些快速计算 方法。 本章介绍对连续系统模型进行离散化处理, 得到一个“等效”的结构比较简单的离散化模型, 便于计算机求解,运行速度较快,又称为“快速 计算方法”。 连续系统模型的离散化方法主要有替换法、 离散相似法和根匹配法。
2 1 S
TS 2TS 1 TS 1 2e e 2 STS
1Z
1 2 1
1 3 2 S TS
2 ( Z 1) TZ
2 1 2 1 T Z ( Z 1) 1 Z 3 T
连续系统离散化方法
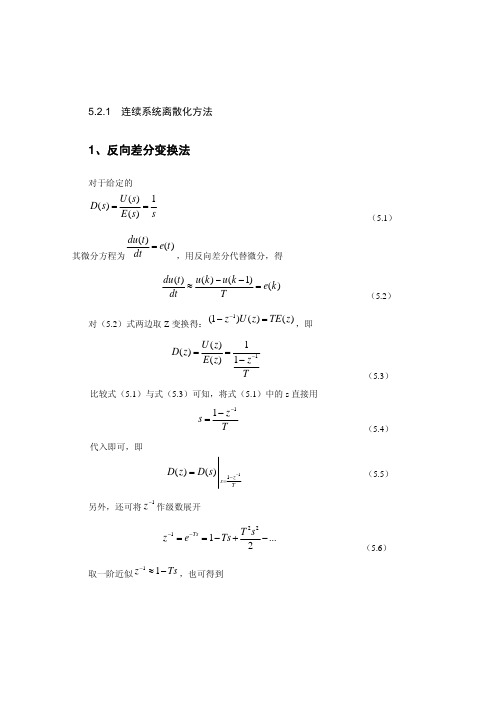
5.2.1
连续系统离散化方法
1、反向差分变换法
对于给定的
D( s) =
U ( s) 1 = E (s) s
(5.1)
du (t ) = e(t ) ,用反向差分代替微分,得 其微分方程为 dt du (t ) u (k ) − u (k − 1) ≈ = e( k ) dt T
对(5.2)式两边取 Z 变换得: (1 − z )U ( z ) = TE ( z ) ,即
上式可以写成
1⎞ ⎛ ⎛1⎞ 2 ⎜σ − ⎟ + ω < ⎜ ⎟ 2⎠ ⎝ ⎝ 2⎠
2
2
由上式可以看出, s 平面的稳定域映射到 z 平面上以 σ = 1 / 2 , ω = 0 为圆心, 1 / 2 为半 径的圆内,如图 5-3 所示。
jω
Im
ω =0
σ
Re
z =1
图 5-3 反向差分变换 s 平面与 z 平面的对应关系 反向差分变换方法的主要特点如下: ①变换计算简单; ②由图 5-3 看出, s 平面的左半平面映射到 z 平面的单位圆内部一个小圆内,因而,如果
⎛ z −1⎞ Re ⎜ ⎟<0 ⎝ T ⎠
令 z = σ + jω ,则上式可以写成
⎛ σ + jω − 1 ⎞ Re⎜ ⎟<0 T ⎝ ⎠
因为 T > 0 ,则有 σ − 1 < 0 即 σ < 1 ,如图 5-4 所示。