宋彤过程控制工程-8 关联解耦_lt
第七章 解耦控制系统
pij 第一放大系数(开环增益) qij 第二放大系数(闭环增益)
2. 相对增益与相对增益矩阵
第一放大系数pij (开环增益) 指耦合系统中,除Uj到Yi通道外,其它通道 全部断开时所得到的Uj到Yi通道的静态增益; 即,调节量 Uj 改变了 Uj 所得到的 Yi 的变化 量 Yi 与 Uj 之比,其它调节量 Uk ( k≠j )均 不变。 pij可表示为:
通过计算过程的微分分别计算出第一放大系数和 第二放大系数,从而得到相对增益矩阵。
另一种方法是增益矩阵计算法
先计算第一放大系数,再由第一放大系数直接计 算第二放大系数,从而得到相对增益矩阵。
2. 相对增益与相对增益矩阵
增益矩阵计算法
即由第一放大系数直接计算第二放大系数。
2. 相对增益与相对增益矩阵
的根所决定。即特征方程的根具有负实部, 两个关联回路是稳定的。
1. 耦合过程及其要解决的问题
通常认为,在一个多变量被控过程中,如果每一个被控
变量只受一个控制变量的影响,则称为无耦合过程,其分 析和设计方法与单变量过程控制系统完全一样。
存在耦合的多变量过程控制系统的分析与设计中需要解决 的主要问题: 1. 如何判断多变量过程的耦合程度? 2. 如何最大限度地减少耦合程度? 3. 在什么情况下必须进行解耦设计,如何设计?
1. 耦合过程及其要解决的问题
稳定性如何判别?
1. 耦合过程及其要解决的问题
当两个回路有关联时,则闭环稳定性由特征方程:
Q(s) [1 G11 (s)Gc1 (s)][1 G22 (s)Gc 2 (s)] G12 (s)G21 (s)Gc1 (s)Gc 2 (s) 0
式中
K 22 h11 K11 K 22 K12 K 21
解耦控制系统

2023/5/24
5
9.1.2 被控对象的典型耦合结构
对于具有相同数目的输入量和输出量的被控对象,典型的 耦合结构可分为P规范耦合和V规范耦合。
图9-3为P规范耦合对象。
2023/5/24
6
它有n个输入和n个输出,并且每一个输出变量
Yi(i=1,2,3,…,n)都受到所有输入变量Ui(i=1,2,3,…,n)的影响。 如果用pij(s)表示第j个输入量Uj与第 i个输出量Yi之间的传递函数, 则P规范耦合对象的数学描述式如下:
2023/5/24
13
对于一个耦合系统,因为每一个控制变量不只影响一 个被控变量,所以只计算在所有其他控制变量都固定 不变的情况下的开环增益是不够的。因此,特定的被 控变量Yi对选定的控制变量的响应还取决于其他控制 变量处于何种状况。
对于一个多变量系统,假设 Y是包含系统所有被
控变量Yi的列向量;U是包含所有控制变量Uj的列向量。 为了衡量系统的关联性质首先在所有其它回路均为开
从而求得耦合系统的相对增益ij。
2023/5/24
25
(2) 直接计算法 现以图9-7所示双变量耦合系统为例说明如何由第一放
大系数直接求第二放大系数。引入P矩阵,式(9-10)可写 成矩阵形式,即
Y Y 1 2 p p1 21 1p p1 2 2 2 U U 1 2 K K 1 21 1K K 1 2 2 2 U U 1 2 (9-14)
(9-13)
2023/5/24
24
从上述分析可知,第一放大系数pij是比较容易 确定的,但第二放大系数qij则要求其他回路开环增 益为较为复杂,特别是多变量系统。
事实上,由式(9-12)和式(9-13)可看出,第 二放大系数qij完全取决于各个第一放大系数pij,这 说明有可能由第一放大系数直接求第二放大系数,
第十章_解耦
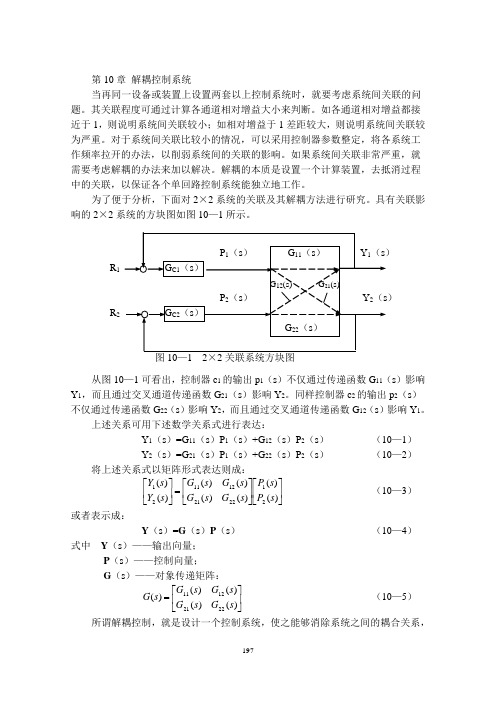
第10章 解耦控制系统当再同一设备或装置上设置两套以上控制系统时,就要考虑系统间关联的问题。
其关联程度可通过计算各通道相对增益大小来判断。
如各通道相对增益都接近于1,则说明系统间关联较小;如相对增益于1差距较大,则说明系统间关联较为严重。
对于系统间关联比较小的情况,可以采用控制器参数整定,将各系统工作频率拉开的办法,以削弱系统间的关联的影响。
如果系统间关联非常严重,就需要考虑解耦的办法来加以解决。
解耦的本质是设置一个计算装置,去抵消过程中的关联,以保证各个单回路控制系统能独立地工作。
为了便于分析,下面对2×2系统的关联及其解耦方法进行研究。
具有关联影响的2×2系统的方块图如图10—1所示。
从图10—1可看出,控制器c 1的输出p 1(s )不仅通过传递函数G 11(s )影响Y 1,而且通过交叉通道传递函数G 21(s )影响Y 2。
同样控制器c 2的输出p 2(s )不仅通过传递函数G 22(s )影响Y 2,而且通过交叉通道传递函数G 12(s )影响Y 1。
上述关系可用下述数学关系式进行表达:Y 1(s )=G 11(s )P 1(s )+G 12(s )P 2(s )(10—1) Y 2(s )=G 21(s )P 1(s )+G 22(s )P 2(s )(10—2)将上述关系式以矩阵形式表达则成:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡)()()()()()()()(212221121121s P s P s G s G s G s G s Y s Y (10—3)或者表示成:Y (s )=G (s )P (s )(10—4)式中 Y (s )——输出向量;P (s )——控制向量;G (s )——对象传递矩阵:⎥⎦⎤⎢⎣⎡=)()()()()(22211211s G s G s G s G s G (10—5)所谓解耦控制,就是设计一个控制系统,使之能够消除系统之间的耦合关系,R 1) R 2图10—1 2×2关联系统方块图而使各个系统变成相互独立的控制回路。
工业过程控制工程课件10.解耦控制

C1
C2
C1 y20 C1 C2
y20 C2
C1
C2
变量配对举例(续)
6. 进行合适的变量配对 ( 假设C1 >y20 >C2 ):
u10
y20 C2 C1 C2
y10 , u20
C1 y20 C1 C2
y10
y20 C2
C1 C1
C2 y20
C1 C2
C1 y20 C1 C2 y20 C2 C1 C2
12 22
1 j 2 j
1n
2n
• • • • • •
yi
i1
i 2
ij
in
• • • • • •
yn n1
n2
nj
nn
相对增益系数的计算方法1
输入输出稳态方程
u1(s)
y1(s) y1 K11u1 K12u2
u2(s)
y2(s) y2 K21u1 K22u2
p11
多变量系统中的耦合
u1(s)
y1(s)
u2(s) ...
MIMO 过程
y2(s) ...
un(s)
yn(s)
基本问题:若采用SISO控制器,如何进行 输入输出变量之间的配对?
多回路PID 控制
相对增益的概念
第一放大系数 pij:在其它控制量 ur (r≠j)均不变的前
提下, uj 对yi 的开环增益
y1 u1
u2
K11
y1
K11u1 K12
y2
K21u1 K 22
q11
y1 u1
y2
K11
K12 K21 K 22
11
1
1 K12 K21
(工业过程控制)10.解耦控制

在系统运行过程中,通过动态调整控制参数或策略,实现耦合的 实时解耦。
解耦控制的方法与策略
状态反馈解耦
通过引入状态反馈控制 器,对系统状态进行实 时监测和调整,实现解
耦。
输入/输出解耦
通过合理设计输入和输 出信号,降低变量之间
的耦合程度。
参数优化解耦
通过对系统参数进行优 化调整,改善耦合状况, 实现更好的解耦效果。
通过线性化模型,利用线性控制理论设计控制器,实现系统 解耦。
非线性解耦控制
针对非线性系统,采用非线性控制方法,如滑模控制、反步 法等,实现系统解耦。
状态反馈与动态补偿解耦控制
状态反馈解耦控制
通过状态反馈技术,将系统状态反馈 到控制器中,实现系统解耦。
动态补偿解耦控制
通过动态补偿器对系统进行补偿,消 除耦合项,实现系统解耦。
特点
解耦控制能够简化系统分析和设计过 程,提高系统的可维护性和可扩展性 ,同时降低系统各部分之间的相互影 响,增强系统的鲁棒性。
解耦控制的重要性
01
02
03
提高系统性能
通过解耦控制,可以减小 系统各部分之间的相互干 扰,提高系统的整体性能。
简化系统设计
解耦控制能够将复杂的系 统分解为若干个独立的子 系统,简化系统的分析和 设计过程。
调试和维护困难
耦合问题增加了系统调试和维护的难度,提高了运营成本。
解耦控制在工业过程控制中的实施
建立数学模型
01
对工业过程进行数学建模,明确各变量之间的耦合关系。
选择合适的解耦策略
02
根据耦合程度和系统特性,选择合适的解耦策略,如状态反馈、
输出反馈等。
控制器设计
03
第八章 解耦控制
3
控制系统之间的耦合(关联)程度可用传递函数矩阵表示。 控制系统之间的耦合(关联)程度可用传递函数矩阵表示。
Y( s ) = G ( s ) U( s )
Y1 (s) G 11 (s) G 12 (s) U1 (s) Y (s) = G (s) G (s) U (s) 22 2 21 2
确定各变量之间耦合程度的分析方法有直接法和相对增 确定各变量之间耦合程度的分析方法有直接法和相对增 益法。直接法是采用解析法得到各变量之间的传递函数 益法。直接法是采用解析法得到各变量之间的传递函数 关系,从而确定过程中每个变量相对每个控制作用的耦 关系, 合程度。相对增益法是一种通用的耦合特性分析工具, 合程度。相对增益法是一种通用的耦合特性分析工具, 通过相对增益矩阵,不仅可以确定变量之间的耦合程度, 通过相对增益矩阵,不仅可以确定变量之间的耦合程度, 相对增益矩阵 并且以此去设计解耦控制系统。 并且以此去设计解耦控制系统。
同理
u2
= k11
= k 21,p22 = ∂y2 ∂u2 = k 22
7
p12 =
∂y1 ∂u2
u1
= k12,p21 =
∂y2 ∂u1
u2
u1
第二增益系数 qij 输入 u j 对输出 yi 的第二增益系数指其它控制回路 均为闭环( Y ( s) = 0, k ≠ j ) 该通道的增益,用
k
∂yi qij = ∂u j
17
v22
vn 2
消除和减弱耦合的方法
(1)被控变量(输出变量)与操纵变量(输入变量) )被控变量(输出变量)与操纵变量(输入变量) 间的正确匹配 若相对增益矩阵为单位阵,则表明过程通道之间没 有静态耦合,系统的每一个通道均可以构成单回路控制。 如果控制系统的相对增益矩阵中有一个相对增益
解耦控制decoupling

( p1 p2 ) ( p0 p2 ) ( p0 p1 ) ( p0 p2 )
2
• 如果p1 p2,则I,说明1 h, 2 p1可行
• 如果p1 p0,则11和22 0,而 21和12 1,此时应 重新匹配变量,即1 p1 , 2 h可行 • 如果p1=(p0-p2)/2, ij=0.5,只能解耦
2
ij 在0 1之间,因为 p0 p1 p2
p0 p1 p0 p2 ( p1 p2 ) p0 p1 p1 p2 p0 p1 p0 p2 ( p0 p1 ) 1 0 Λ 回路间不耦合 0 1 0.5 0.5 Λ 耦合最严重 0.5 0.5
r1
-
Kc1 gc1
1
K11 g11
K21 g21
+
+
y1
K12 g12 r2
-
Kc2 gc2
调节器
2
K22 g22
过程
+
+
y2
二.求取相对增益的方法
1.利用相对增益定义(7-4)来计算 例7-1
PC QC
p1
PT DT
h p2 2
p0 1
压力--流量系统的数学描述:
1 2 ( p0 p2 ) h 1 ( p0 p1 ) 2 ( p1 p2 ) (7 6) 1 2 y1 h, y2 p1
(7 12) (7 13)
y2
K12 K 21 K11 K 22 (7 14)
11
p11 K11 K 22 q11 K11 K 22 K12 K 21
依此办理可得12, 21, 22。 由上例可知,只要有Kij就可推得相对增益,是否可以 有更方便的计算方法? 假设有一个矩阵H,它与第二放大系数矩阵Q有如下关 系:
过程控制系统[李国勇][电子教案]第9章解耦控制系统
![过程控制系统[李国勇][电子教案]第9章解耦控制系统](https://img.taocdn.com/s3/m/b013dd3f5a8102d276a22f84.png)
Yk const
17
pij与qij之比定义为相对增益或相对放大系数ij, ij可表示为 pij Y Y i i ij (9-8) qij U j U j U k const Yk const 即 由相对增益ij元素构成的矩阵称为相对增益矩阵。
3
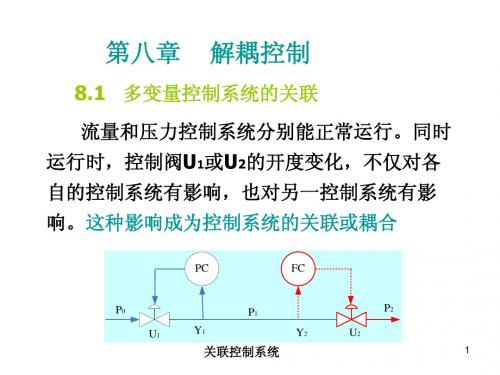
4
图9-1所示是化工生产中的精馏塔温度控制方案。 ul的改变不仅仅影响y1,同时还会影响y2;同样 地,u2的改变不仅仅影响y2,同时还会影响y1。因此, 这两个控制回路之间存在着相互关联、相互耦合。这 种相关与耦合关系如图9-2所示。 耦合是过程控制系统普遍存在的一种现象。耦合 结构的复杂程度主要取决于实际的被控对象以及对控 制系统的品质要求。因此如果对工艺生产不了解,那 么设计的控制方案不可能是完善的和有效的。
Y1 q11 U 1
Y2 const
K 12 K 21 K 11 K 22 K 12 K 21 K 11 K 22 K 22
25
类似地可求得
q 21 K 11 K 22 K12 K 21 K K K 21 K 12 K K K12 K 21 ; q12 11 22 ; q 22 11 22 K 12 K 21 K 22
pij
U j
U k const
16
然后,在所有其它回路均闭合,即保持其它被控 变量都不变的情况下,找出各通道的开环增益,记作 矩阵Q。它的元素qij的静态值称为Uj与Yi通道的第二放 大系数。它是指利用闭合回路固定其它被控变量时, Uj与Yi的开环增益。qij可以表为 (9-7)
Yi qij U j
13
U 1 R1 Y1 Y1 3U 1 4U 2 ; U 2 R2 Y2 Y2 5U 1 U 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Part II: Control System Design
Chapter 7 Control of Single-Input-Single-Output (SISO) Processes
Chapter 8 Two-Degree-of-Freedom (2DOF) Control of SISO Processes
先进控制技术研究所
8. 系统关联及解耦控制
工业生产过程中多变量输出以及各控制回路之间通 常存在着不同程度的耦合关联关系。强相关或负相关 的耦合关系会严重影响控制性能,甚至破坏闭环系统 的稳定性,因此应在控制系统设计中考虑解耦问题。
主要内容: 关联系统描述分析 相对增益阵Λ 系统耦合强度的削减方法 解耦控制设计
Chapter 9 Cascade Control System 先进控制介绍
Chapter 10 Multiloop Control of Multivariable Processes 解耦控制
Chapter 11 Decoupling Control of Multivariable Processes
P12(s)
G12(s)GC2(s) Q(s)
P21(s)
G21(s)
G12(s)
u2
G22(s)
Y1(s) Y2(s)
开环
Y(s) Y Y 1 2((s s)) G G 1 21 1((s s))
G 12(s)U 1(s) G 22(s) U 2(s)
闭环系统(Multiloop): 由闭环回路有:
u1
Gc1(s)
G11(s) G21(s)
F1
F2
数学描述方式:对角阵
YyyH FGHF 01(s)
0 GБайду номын сангаасF2
u uF F12
b. 单向关联:控制回路间存在单向影响,具有独立 和非独立两类控制回路。
单向关联流程例图:
数学描述方式:三角阵
Q、T TC
设:液位控制回路为回路1;
LC
温度控制回路为回路2。
蒸汽(F1)
单向关联
F2
yyTLGTF01(s)
流程图:
数学描述方式:满阵
TC
冷却水(F1)
进料(F2)
yyC TG GTCFT1((ss))
G GC TF C2((ss))uuF F12
CC
连续搅拌反应器
关联关系: 反应器内温度变化影响出口浓度,需调节进料量保证出口浓
度要求。 进料量变化影响反应器内温度,需要调节冷却水流量保证反
应温度。 即:两控制回路中任意回路的动作将导致另一回路做相应调节。
其中:
B、D、F分别为支路和总管道的流量 X、Y、Z分别为支路和总管道中某组 分的含量
控制要求:
通过调节二支路的流量保证总管道中 的流量及成份的稳定
可选操作变量 流量B、流量D
D,Y B,X
(a)
FC F,Z
D,Y B,X
AC
(b) 物料混合控制方案
AC
F,Z FC
例2:蒸发过程
控制方案:
L
蒸气
Y1(s)
U1(s)GC1(s)R1Y1(s)
G12(s)
U2(s)GC2(s)R2Y2(s)
Gc2(s) u2
G22(s)
Y2(s)
闭环
代入开环描述式,消去U1和U2,得:
Y(s) Y Y 1 2((s s)) G G 1 21 1((s s))
G 12(s)U 1(s) G 22(s) U 2(s)
L
C
进料
出料
C
进料
出料
蒸发过程
(a)
控制要求:
控制出料浓度及塔内液位
L
可选操作变量: 加热蒸气量 出料量
C
进料
出料
(b)
提出问题:
蒸发过程控制方案
多被控变量与多操作变量系统的参数配合及控制回路构成
控制回路间耦合处理
8.1 关联系统描述分析
1) 关联分类 a. 无关联:各控制回路相互独立
HC
FC
G GLTFL2((ss))uuF F12
关联关系:
温度对液位控制无影响(入料温度变化对液位系统无影响,仅温度 控制回路动作)
液位对温度控制回路有影响(入料流量变化需要调节输出流量及调 节蒸气流量,同时,液位控制回路的动作将导致温度控制回路产生 相应动作)
c. 双向关联:各控制回路间均具有相互影响,不存在独立回路。 例:连续反应器内温度与产品质量控制
Chapter 12 Batch Process Control
Chapter 13 Concluding Remarks
Institute of Advanced Control Technology
4
例1:物料混合
D,Y F,Z
B,X 物料混合
数学描述:
F B D FZ BX DY
控制方案:
Y1(s)P11(s)R1(s)P12(s)R2(s) Y2(s)P21(s)R1(s)P22(s)R2(s)
Y1(s)P11(s)R1(s)P12(s)R2(s) Y2(s)P21(s)R1(s)P22(s)R2(s)
其中:
P11(s)
G11(s)GC1(s)GC1(s)GC2(s) G11(s)G22(s)G12(s)G21(s) Q(s)
2) 关联关系的方框图描述及分析 a. 方框图
开环:
u1
G11(s) G21(s) G12(s)
u2
G22(s)
开环
Y1(s) Y2(s)
闭环
u1
Gc1(s)
Gc2(s) u2
G11(s) G21(s) G12(s) G22(s)
闭环
Y1(s) Y2(s)
b. 传递函数矩阵 开环:
u1
G11(s)
Published by Springer in Jan 2019
Part I: Process Identification
Chapter 1 Introduction Chapter 2 Step Response Identification of Stable Processes Chapter 3 Step Response Identification of Integrating Processes Chapter 4 Relay Feedback Identification of Stable Processes Chapter 5 Relay Feedback Identification of Integrating Processes Chapter 6 Relay Feedback Identification of Unstable Processes