第四章 阵列信号处理
阵列信号处理某高校课程ppt

第一章
绪论
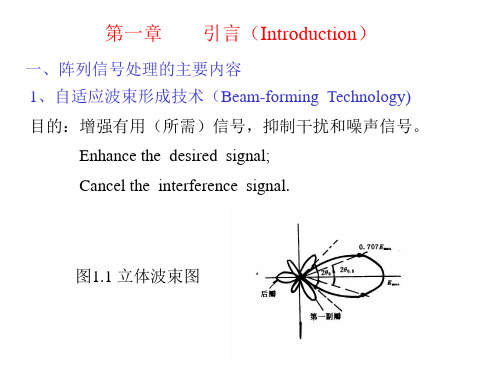
信号处理研究的内容
信号处理主要 研究方向
从复杂环境中 提取有用信号
由检测到的信号中 提取信息
信号处理的发展
起源于17世纪 50年代前期 分离元件 速度低 体积大 可靠性差
速度高 体积小 可靠性高
60年代后期 集成电路
信号处理的发展
信号处理前期
信号处理后期
时域信号处理 (一维)
图像处理
特点: 与时间频率相对应,反映相位在空间的变化; 其值为:
v k = 2π / λ
是矢量函数,与方向有关; 与波长成反比; 是传播媒质的函数; 也称为相位常数;
慢矢量: 慢矢量: v v 定义 α = k / ω 示为:
,则波动方程的解可以表
v v v s( x, t ) = A exp[ jω(t − α ⋅ x )]
2 y
+ k
2 2
2 z
c
2.8
则波动方程有解,且其解为:
s ( x, y, z , t ) = A exp[ j (ωt − k x x − k y y − k z z )]
平面波定义: 在任意时刻 t ,在一个平面内 0 即, C为常数。 理论上真正的平面波不存在。 单频的平面波可以表示为:
v s( x , t 0 )
波束形成;
窗函数; 阵列的形成; 数字波束形成等;
阵列处理方法;
抗干扰; 超分辨;
空间目标参数的获取和估计; 两大类: 空间滤波; 空间谱估计;
阵列信号处理的主要目的: 1)增加信噪比 空间采样; 空间滤波; 2)利用阵列信号处理,对波源的个数、传播 方向、位置等参数进行估计。 3)对运动目标进行跟踪。
v s( x , t ) =
阵列信号处理
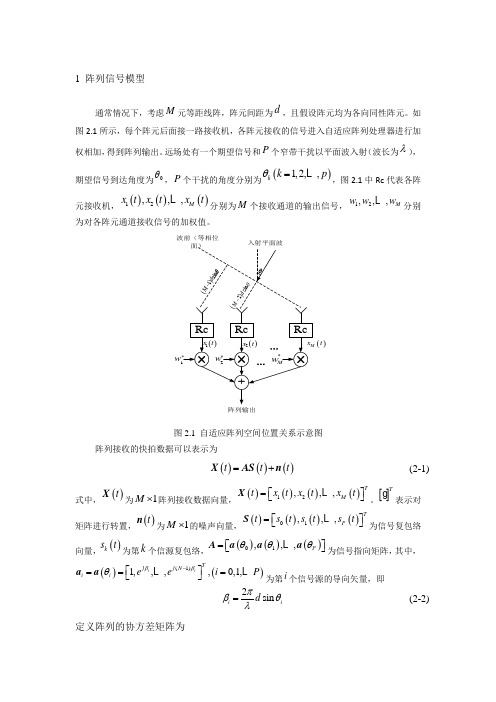
1 阵列信号模型通常情况下,考虑M 元等距线阵,阵元间距为d ,且假设阵元均为各向同性阵元。
如图2.1所示,每个阵元后面接一路接收机,各阵元接收的信号进入自适应阵列处理器进行加权相加,得到阵列输出。
远场处有一个期望信号和P 个窄带干扰以平面波入射(波长为λ),期望信号到达角度为0θ,P 个干扰的角度分别为()1,2,,k k p θ= ,图2.1中Rc 代表各阵元接收机,()()()12,,,M x t x t x t 分别为M 个接收通道的输出信号,12,,,M w w w 分别为对各阵元通道接收信号的加权值。
()t w 阵列输出波前(等相位图2.1 自适应阵列空间位置关系示意图阵列接收的快拍数据可以表示为()()()t t t =+X AS n(2-1)式中,()t X 为1M ⨯阵列接收数据向量,()()()()12,,,TM t x t x t x t =⎡⎤⎣⎦X 。
[]T表示对矩阵进行转置,()t n 为1M ⨯的噪声向量,()()()()01,,,TP t s t s t s t =⎡⎤⎣⎦S 为信号复包络向量,()k s t 为第k 个信源复包络,()()()01,,,P θθθ=⎡⎤⎣⎦A a a a 为信号指向矩阵,其中,()()(1)1,,,,0,1,i iTj j N i i e e i P ββθ-⎡⎤===⎣⎦a a 为第i 个信号源的导向矢量,即2sin i i d πβθλ=(2-2)定义阵列的协方差矩阵为()()2H H x s n E t t σ⎡⎤==+⎣⎦R X X AR A I (2-3)式中,()()H s E t t ⎡⎤=⎣⎦R S S 为信号的协方差矩阵,I 为M 维单位矩阵,2n σ为阵元的噪声功率,本文中约定,[]T表示转置,[]*表示共轭,[]H表示共轭转置。
式(2-3)常由接收数据采样协方差矩阵ˆx R 代替,即()()11ˆNH xiii t t N==∑R x x(2-4)如图2.1所示的自适应阵列模型,阵列的M 个通道接收信号经加权处理后,最后的输出信号为()()()1MH i i i y t w x t t *===∑w x(2-5)阵列的方向图()p θ定义为()()H p θθ=w a(2-6)调整自适应阵列的权矢量w ,可以改变阵列的方向图,即改变各个方向上入射信号增益。
阵列信号处理原理、方法与新

阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
多通道信号处理中的阵列信号处理技术
多通道信号处理中的阵列信号处理技术在现代通信领域中,多通道信号处理已成为一项重要的技术,能够在众多应用中实现高效的信号提取和处理。
而其中,阵列信号处理技术则是多通道信号处理中的关键技术之一。
本文将以阵列信号处理技术为主题,探讨其在多通道信号处理中的应用和重要性。
一、阵列信号处理技术的基本概念阵列信号处理技术是指利用多个接收通道对信号进行采集和处理的一种信号处理方法。
这些接收通道可以部署在不同的位置上,通过对各通道接收到的信号进行分析和处理,可以获得目标信号的方向、距离和频率等信息。
阵列信号处理技术在无线通信、雷达、声纳等领域中都有着广泛的应用。
二、阵列信号处理技术的原理在阵列信号处理中,通过合理地设计和部署接收通道,并利用差分和合成等技术,可以实现对信号的增强和抑制。
其基本原理可以概括为以下几个方面:1. 时差测量:通过计算不同通道接收到信号的时间差,可以确定信号的到达方向。
这种方法被广泛应用于声纳和雷达领域,用于目标定位和跟踪。
2. 相关性分析:通过对不同通道接收到的信号进行相关性分析,可以提取出目标信号并抑制噪声。
这种方法在无线通信和雷达等领域中被广泛应用,可以提高信号的质量和可靠性。
3. 波束形成:通过对接收到的信号进行加权合成,可以实现对信号的增强和抑制。
这种方法在天线和无线通信系统中被广泛应用,可以提高通信质量和距离。
三、阵列信号处理技术在多通道信号处理中的应用阵列信号处理技术在多通道信号处理中有着重要的应用。
以下列举了几个常见的应用场景:1. 无线通信系统:在无线通信系统中,利用阵列技术可以实现多天线发射和接收。
通过对接收到的信号进行处理,可以提高无线信号的覆盖范围和传输速率。
2. 声纳系统:在声纳系统中,通过部署多个接收通道,可以实现对海洋中的声波信号进行定位和跟踪。
阵列信号处理技术可以提高声纳系统的性能和探测范围。
3. 雷达系统:在雷达系统中,利用阵列技术可以实现对目标信号的定位和跟踪。
阵列信号处理(知识点)

信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P span a a a θθθ为信号子空间,是N 维线性空间中的P 维子空间,记为P N S 。
P N S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W 实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X W HW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理 ARRAYppt课件

其中: SNRomni——接收机入口处的信噪比
CBlo(g 1SNR ) C——信道容量:bps B——接收机2 带宽:Hz
Omni
;.
25
波束成形天线示意图 天线阵的各个单元间距小于/2
发送波束成形
接收波束成形
;.
26
多天线系统的信道容量(2)
波束成形天线系统:将发射功率相等的分配到M个全向发射天线上,M个 全向收、发天线采用相位波束成形技术,则信道容量为:
;.
为什么要进行阵列信号处场的有用特征,获取信号源的属性等信息。 改善蜂窝和个人通信服务系统质量、覆盖范围和容量的强有力的工具。
研究兴趣:将接收天线阵列用于反向连接(客户到基站)
;.
;.
来看两个阵列在天线方面的应用
智能天线阵 分布多天线阵
智能天线阵 ;.
;.
29
多天线系统的信道容量比较
;.
30
传输环境对天线系统的影响
MIMO与波束成形天线的频谱效率 ([4,6],SNR=10dB,中断率 10% )
15
d
频谱效率 b/s/Hz
CBe a m sBlo2g(1M2SNORm)n i SN足 R 够B大 {2lo2g(M.SNORm}ni
;.
27
MIMO天线系统示意图
独立信道
天线阵
天线阵2
;.
28
多天线系统的信道容量(3)
如果发射功率分散到M个独立的信道中,并且各个信道具有相同的路径 损耗,则信道容量为:
CMIMOMlBo2g(1SNORm)ni S N足 R 够M 大{Blo2(gSNORm}n i
;.
平面波与阵列 天线应具有方向性——定向发射和接收 采用阵列天线——易于控制波束 阵列处理的对象——空间信号
现代数字信号处理课件:阵列信号处理
阵列信号处理
2. 阵列信号协方差矩阵分解 阵列信号协方差矩阵R=E[XXH]可以写作
R
E[ x1 x1 ] E[x2 x1]
E[ x1 x2 ] E[x2 x2]
E[ x1 xM E[x2 xM
] ]
E[
xM
x1
]
E[xM x2]
E[
xM
xM
]
(7.1.11)
这是一个Hermitian方阵,则其特征分解为
di l c
1 c
( xi
sin
cosj
yi
cos
cosj
zi
sinj )
(7.1.4)
通常情况下,考虑空间有N个独立远场窄带信号入射到
M个阵元的阵列上,且有零均值高斯白噪声n(t),可以得到
阵列的输出为
x1(t) exp( j2πf011)
x2 (t
)
exp(
j2πf0
21 )
UHRU=Σ
(7.1.13)
将R=ARSAH+σ2I代入上式,可得
UH(ARSAH+σ2I)U=Σ 而酉矩阵U满足UHU=I,因此
(7.1.14)
UHARSAHU=Σ-σ2I
(7.1.15)
由上面的分析可知,Σ可分为两部分: 一是与信号对应
的大特征值,由ARSAH和RN提供;二是与噪声对应的小特征 值σ2,由RN提供。即
则各阵元第k次快拍的采样值的矩阵形式为
X(k)=AS(k)+N(k)
(7.1.7)
由于S(k)随k变化,且其初相通常为均匀分布,一阶统
计量(均值)为零,所以不能直接采用一阶统计量来提取方向
信息。而二阶统计量可以消除信号S(k)的随机初相,可以用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中 θ = (ξ ,ψ ) 为信源的波达方向。
4.3阵列信号处理的统计模型
一、窄带信号的延迟 一个中心频率为fc的实值带通信号s(t)可以写作
s (t ) = Re[ z (t )e j 2πf ct ]
z(t)为基带信号,是接收信号的复包络。 实信号s(t)延迟时间 τ
sτ (t ) = s (t − τ ) = Re[ z (t − τ )e − j 2πf cτ e j 2πf ct ]
⎡ e − j 2πΔ1 sin θ ⎤ ⎢ ⎥ a(θ ) = ⎢ M ⎥ ⎢e − j 2πΔ M sin θ ⎥ ⎣ ⎦
在等距线阵中,若相邻阵元间距为 Δ 个波长,以 第1个阵元为基准点,则有 Δ i = (i − 1)Δ
1 ⎤ ⎡ ⎢ e − j 2πΔ sin θ ⎥ ⎥ a(θ ) = ⎢ ⎥ ⎢ M ⎢ − j 2π ( M −1) Δ sin θ ⎥ ⎦ ⎣e
空间中一系列传感器组成阵元,各阵元接收信 号加权组合 改变阵列的权值,可使信号空间波束形状随之 变化。 空域处理与时域FIR滤波器有类似对偶关系 时域离散采样——空域离散采样; 时域滤波、分离和参数估计——空域滤波、分离 和参数估计。
若空间信号载频为
e
j ωt ,
k = ω / c = 2π / λ
x(t ) = [∑ α (θ i ) β i g (t − τ i )] ∗ z (t )
i =1
D
三、阵列信号处理的统计模型 M个阵元的等距线阵,有P个信源,M>P,波达 方向为 θ1 , L , θ P ,以第一个阵元为基准,各信 源在基准点的复包络分别为 s1 (t ),L, sP (t ) 则在第m个阵元上第k次采样值为
定义方向图的幅度平方为
2
2
2 fc
R(φ ) = 1 + g 2 + 2 g cos(ψ − π cos φ )
令g=1,即
R(φ ) = 2 + 2 cos(ψ − π cos φ )
2
ψ = π 和 π 时方向图如图所示
2
d 对于有M个阵元, =
λ
2
时,权系数为
( g1e jψ 1 , L , g M e jψ M ) 时,阵列方向图为
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
Δφ = 2π
λ
d sin θ
FIR相邻抽头间的相位差决定于输入正弦波的频 率 ω ,Δφ = ωTd ( Td 为延迟时间),以 sin θ 作变量所得的方向图与FIR的频率响应特性类似。 FIR有关设计方法和分析理论就可以直接移植 到等距线阵。
空间中某处接收信号r不仅取决于时间t,而且还 取决于信源的入射角 φ (波达方向 θ 的余角)
zτ (t ) = z (t )e
− j 2πf cτ
相移 φ 与波达方向角 θ 有以下关系
φ = − j 2πf cτ = − j 2πΔ sin θ
在位置 Δ i 的阵元即第i个阵元的接收信号
xi (t ) = α (θ ) zτ i (t ) = α (θ )e − j 2πΔ i sin θ z (t )
若基带信号为z(t),设g(t)为整个发射接收系统中 除多径传输以外的冲激响应,设有D条等效路 径,每条路径可能有不同数目的散射子路径, 每条路径由参数三元组 (θ i , β i , τ i ) 描述,θ i 为第i条等效路径的入射角,阵列响应增益为 α (θ i ) 为第i条等效路径的路径时延,β i 为第i条等效 路径的路径损失,包括总的衰落和所有的相移。 接收信号模型为
第四章 阵列信号处理
阵列信号处理是信号处理的一个重要方向
波束形成——主瓣指向所需方向 零点形成——天线零点对准干扰方向 空间谱估计——空间信号波达方向分布估计 应用 信源定位、信号分离和信道估计 移动通信中的阵列信号处理 反向连接自适应或智能天线,同时形成多波束指 向各用户,分集接收
4.1平面波与阵列
图中 为电波传播方向角,相对于x轴的逆时针 方向定义。
波前
r
−k
θ
基准点
x
波数向量为
k = k[cos θ , sin θ ]T
对于点辐射源,距离源点足够远时,在接收局部 区域内可以认为是近似平面波——远场条件。
设在空间有M个阵元组成的阵列,相对于基准点 的位置向量分别为 ri (i = 1,L , M , r1 = 0) 则各阵元上接收信号分别为
各阵元的接收信号用向量表示
x1 (t ) ⎤ ⎡ e − j 2πΔ1 sin θ ⎤ ⎡ ⎥ ⎢ M ⎥=⎢ x(t ) = ⎢ M ⎢ ⎥α (θ ) z (t ) = a(θ )α (θ ) z (t ) ⎥ ⎢ xM (t )⎥ ⎢e − j 2πΔ M sin θ ⎥ ⎣ ⎦ ⎣ ⎦
其中 a(θ ) 为方向向量
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
y (t ) = ∑ s (t ) w e
r = y (t , φ ) t ∈ (−∞, ∞), φ ∈ (0, π )
信号输出端所观察到的是接收信号与空间域的相 关后(波束方向的作用)的综合
1 2π
R ( )
2π
∫ y(t , φ ) R(φ )dφ
0
称为阵列的方向图。
对于只有两个阵元的最简单线阵,计算其方向 图,设一频率为 f c 的平面正弦波场以角度 入射到阵列上,如图,阵元2上信号波前相对于 阵元1波前延迟正弦波传播程差 d cos φ 所花费的时间,两个阵元上的响应分别为
R(φ ) = ∑ g m e
m =1
M
j [ψ m −π ( m −1) cosφ ]
r
z
θ
三、均匀圆阵 M个相同的全向阵元均匀分 布在x-y平面一个半径为R的 圆周上,原点位于阵列圆心,
γ
ψ
y
x
间的夹角,方位角 ψ ∈ [0, 2π ] 是原点到信源的 连线在x-y平面上的投影与x轴之间的夹角。 第m个阵元与x轴的角度 γ m = 2πm / M 该处的位置 向量为 p m = ( R cos γ m , R sin γ m , 0) 若波数为 k0 = 2π / λ 的窄带平面波在方向 − r (仰角和方位角分别为 θ 和 ψ )上传播, r 为单 位向量,
]
= e j ( 2πf ct +α ') [1 + g 2 + 2 g cos(ψ − 2πf c d cos φ )]1/ 2 c = e j ( 2πf ct +α ') [1 + g 2 + 2 g cos(ψ − π cos φ )]1/ 2
ge jψ 为加权系数,选取 d = λ = c 其中
a(θ) = [1, e
T − jr2 k
,L, e
T − jrM k T
]
ri = ri − r1 i = 2, L , M
当有多个信源(p个),到达波方向向量可分为 a(θ1 ) , (θ 2 ) ,…,a(θ p ) 表示,这p个方向向量组 a 成的矩阵 A = [a(θ1 ), L , a(θ p )] 称为阵列的方向矩阵或响应矩阵,表示所有信源 的方向。 改变空间角 θ ,使方向向量 a(θ) 在M维空间内 扫描,形成曲面称为阵列流形,用 A 表示 A = {a(θ ) θ ∈ Θ} Θ = [0, 2π ] 为波达方向 θ 所有 可能取值的集合。 阵列流形 A 即是阵列方向向量的集合。
θ ∈ [0, π ]是原点到信源的连线与z轴之 信源俯角 2
r = (sin θ cosψ , sin θ sinψ , cos θ )
原点与第m个阵元接收到的信号的复包络之间的 相位差为
ψ m = e jk rp = e jk R sinθ cos(ψ −γ ) = e jξ cos(ψ −γ
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
m =1
M
π * − j 2λ ( m −1) d sin θ m
y (n) = s (n) W H a(θ ) = s (n) g (θ ) 采样后的向量形式,
W = [ w1 , L , wM ]T 为权矢量, g (θ ) = W H a(θ )
称为阵列的方向向量,或方向系数、波束图。
等距线阵空域的方向响应与FIR频率响应有类似 对偶关系,阵元可视为FIR延迟抽头,则相邻 阵元之间相位差 Δφ 决定波达方向 θ ,