闭环脉冲传递函数共127页
脉冲传递函数
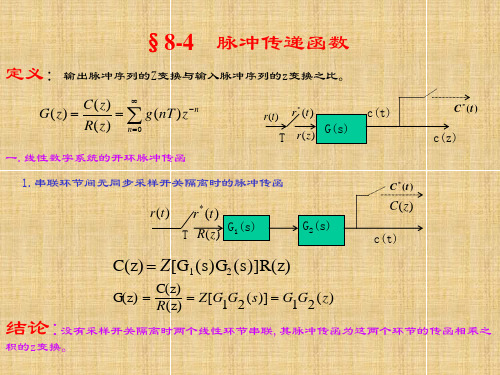
例1:求下图所示的两个串联环节的脉冲传函,其中
10 1 G1 (s) s , G 2 (s) s 10
G1(s)
G2(s)
解: G(z) Z[G 1 (s)G 2 (s)] G1G 2 (z)
10 ] Z[ 1 s s 10 -10T z(1 - e ) -10T (z - 1)(z - e )
积的z变换。
2.串联环节有同步采样开关时的脉冲传函
c* (t )
r (t )
r * (t )
d(t) d (t )
*
C ( z)
T
G1(s)
T D( z )
G2(s)
c(t)
C(z) G 2 (z)D(z) D(z) G1 (z)R(z) C(z) G1 (z)G2 (z)R(z) C(z) G(z) G1 (z)G2 (z) R(z)
G(s) T r( z)
c(z)
r (t )
r * (t )
T R( z )
C ( z)
G1(s) G2(s) c(t)
C(z) Z [G1 (s)G2 (s)]R(z)
C(z) G(z) Z [G1G2 ( s )] G1G2 ( z ) R(z)
结论:没有采样开关隔离时两个线性环节串联,其脉冲传函为这两个环节的传函相乘之
P270-9-6.
z (1 e 10T ) R( z ) a) C ( z ) 10T ( z 1)(z e )
b)
z z z2 C( z) R( z ) R( z ) 10T 10T z 1 z e ( z 1)(z e )
z R( s ) C ( z) Z 10T z e s
闭环脉冲传递函数
2.
Z变换方法
已知函数 x1 (t ) 1, x2 (t ) (t kT ) , x3 e at
k 0
(1)级数求和法
例7.1 解: ①
求它们的Z变换表达式。
单位阶跃函数 x1 (t ) 1(t ) 在所有时刻上的
采样值均为1,即 x1 (kT ) 1 Z 变换为
数字量
计算机 D/A A/D
输入
模拟量 执行 机构
传感器
工业 过程
输出
数字量
2.计算机监督控制系统(SCC—Surveillance Computer Control System)
A/D
输入 …… 模拟 控制器 被控 过程 执行 机构
Compu ter
D/A
输出
……
检测 装置
3. 集散控制系统(TDC—Total and Distributed Control)
连续系统分析
微分方程
(L变换)
传递函数,频域分析(经典)
状态方程:求运动解,通过系统矩阵分析(现代)
离散系统分析
差分方程
(z变换)
脉冲传数,频域分析(经典)
差分状态方程:状态空间方法(现代)
7.1.3 复杂的计算机控制系统
1. 直接数字控制系统(DDC—Direct Digital Control System)
n
z Re s X ( pi ) pi T z e i 1
n
Ri
i 1
n
n z X ( z ) Re s X ( pi ) Ri piT z e i 1 i 1 式中 z Ri Re s X ( pi ) piT z e z Ri 为 X ( s) 在极点 s pi 上的留数。 piT z e ① 当 X ( s) 具有单极点 s pi 时 n
闭环传递函数

闭环系统的调试与调优
初始化参数
1
根据系统要求设置初始参数
现场调试
2
对系统进行实时现场调试
数据采集
3
采集系统运行关键指标数据
性能优化
4
对采集数据进行分析优化系统
闭环系统调试与调优是关键步骤,需要仔细规划并逐步执行。首先根据系统要求合理设置初始参数,确保系统能正常运行。接下来对系统进行现 场实时调试,收集运行数据。最后通过对采集数据的分析,优化系统性能,达到最佳效果。
闭环系统的控制策略
控制策略制定
基于闭环系统的特点和性能目标,制定合理的控制策略,如PID控制、模型预测控制、自适应 控制等。
控制参数优化
对控制参数进行精细调整和优化,确保系统稳定性、动态性能和抗干扰能力。
控制策略鲁棒性
考虑模型不确定性和环境干扰,设计具有良好鲁棒性的控制策略,增强系统的抗干扰能力。
闭环系统的混合控制
复杂系统集成
混合控制通过融合不同控制策略,如 PID、自适应、鲁棒等,解决复杂系统的控制难题,提高 系统性能。
控制算法优化
混合控制通过不同算法的优势互补,如模型预测控制与神经网络控制,达到更优的控制效果。
系统性能平衡
混合控制通过调整各种控制策略的权重,平衡系统的稳定性、响应速度和鲁棒性等性能指标。
稳定性分析
进行鲁棒性分析需要对闭 环系统的稳定性进行仔细 评估。通过小扰动分析、 Lyapunov函数法等方法, 确保系统具有足够的稳定 裕度。
性能指标分析
除了稳定性,还需要分析 闭环系统的动态响应、跟 踪精度、抗干扰能力等性 能指标,确保满足设计要 求。考虑参数变化和干扰 情况下的指标变化趋势。
鲁棒控制设计
闭环系统的最优控制
采样系统的典型结构图闭环脉冲传递函数

a)
1 S2
1( a
1 S
1 S
) a
查表得:
Z( GP( s)) S
Tz ( z 1)2
1( a
z
z 1
z
z e aT
)
∴ 有零阶保持器的开环系统脉冲传递 函数为:
G( z) (1 z1 )Z( GP( s)) S
西南民族大学
例二、设离散系统如图所示,其中
1
a
G1( s) S , G2( s) S a
第六章
离散系统
黄勤珍
西南民族大学
※ 6 — 1 线性离散系统
一、信号采样和复现
1、在采样控制系统中,把连续信号转变为 脉冲系列的过程 — 采样过程(采样)
实现采样的装置 — 采样器(开关)T 表示采 样周期(S) ,fs = 1/T (采样频率) (1/S) , 表示采样角频率。
ws
2fs
2
G1( z)
Z( ) S
z1
a
az
G2( z)
Z( S
) a
z
e aT
G(
z)
G1(
z)G2 (
z)
(
z
az 2 1)( z
e aT
)
az 3 C( z) G( z)R( z) ( z 1)2( z eaT )
西南民族大学
系统b:
a G1( s)G2( s) S( S a) G( z) G1G2( z) Z[ a ]
Z 域(朱利稳定判据)且满足:
D(1) > 0 , D(-1)
§2.5闭环传递函数§2.6 梅逊公式

Mason 公式(3)
例 3 求传递函数 C(s)/R(s)
控制系统结构图
例 3 求C(s)/R(s)
1 [ 5
1 1 1 ] 6 3 RCs ( RCS ) 2 ( RCs)
自动控制原理
潍坊科技学院机械工程学院 李世琛
自动控制原理
第二章 控制系统的数学模型
§2.1 §2.2 §2.3 §2.4 §2.5 §2.6 引言 控制系统的时域数学模型 控制系统的复域数学模型 控制系统的结构图及其等效变换 控制系统的传递函数 控制系统的信号流图
课程回顾
2.3 复域数学模型 —— 传递函数 (1)传递函数的定义、性质和适用范围 (2)常用控制元件的传递函数 (3)典型环节 2.4 控制系统的结构图及其等效变换 (1)系统结构图的导出 (2)结构图等效化简
控制系统结构图
例 5 求C(s)/R(s)
1 [ G2 H 2 G1G2G3G4 H 1 G1G2G4 H 1 ] 1 G2 H 2 G1G2G3G4 H 1 G1G2G4 H1 P1 G1G2G3G4 1 1 P2 G1G2G4 2 1 P3 G2G3G4G5 3 1 P4 G2G4G5 4 1 P5 G3G4G6 5 1 P6 G6 H 2G2G4 6 1
§2.6 控制系统的信号流图
⑽回路增益:回路中各支路增益的乘积,称为回路增益 ⑾ 不接触回路:信号流图中没有任何共同节点的回路,称为不接触回路或互不 接触回路。
4、信号流图与结构图的对应关系
信号流图 源节点 阱节点 混合节点 支路 支路增益 前向通路 回路 互不接触回路 结构图 输入信号 输出信号 比较点,引出点 环节 环节传递函数
闭环传递函数

微分方程为: T dy(t) y(t) u(t) dt
开环传函为: G(s) 1
Ts
闭环传函为: (s) 1
T为系统的时间常数,
Ts 1
1/T为开环增益.
2019年8月28日4时34分
17
3.2 一阶系统的时域分析
1)单位阶跃响应 单位阶跃输入 u(t) 1(t)的像函数为 U(s) 1
2019年8月28日4时34分
26
3.2 一阶系统的时域分析
例3.2.1一阶系统Fra bibliotek结构图如图所示,若kt=0.1,
试求系统的调节时间ts,如果要求ts 0.1秒。试求
反馈系数应取多大?
R(s)
C(s)
100/s
kt
2019年8月28日4时34分
27
3.2 一阶系统的时域分析
解 系统的闭环传递函数
故kt 0.3
2019年8月28日4时34分
28
3.2 一阶系统的时域分析
思考题和选做题:
(1)当一阶对象的模型为 k 时,分别求其输出
Ts 1
响应所得的结果是否符合前面的证明和结论?试着
解释为什么有这样的结果?
(2)当输入信号为 u(t) 1 t2 时, 1 的输出响应是
2
Ts 1
什么?能否根据这个结果利用上面思考题直接写出
3、线性系统的时域分析
3.1 典型输入信号与时域性能指标 3.2 一阶系统的时域分析 3.3 二阶系统的时域分析 3.4 高阶系统的时域分析 3.5 系统模型的时域测定法
2019年8月28日4时34分
1
本章学习要点
• 掌握典型输入信号和时域性能指标 • 掌握一阶系统的时域分析方法 • 掌握二阶系统的时域分析方法 • 了解高阶系统的主导极点及其时域分析方
第八章 脉冲传递函数及性能分析
第八章 脉冲传递函数及性能分析分析线性定常线性离散系统时,脉冲传递函数也是一个很重要的概念,线性定常线性离散系统的动态特性可以由脉冲传递函数来描述。
通过脉冲传递函数,可以对线性定常线性离散系统的性能进行分析。
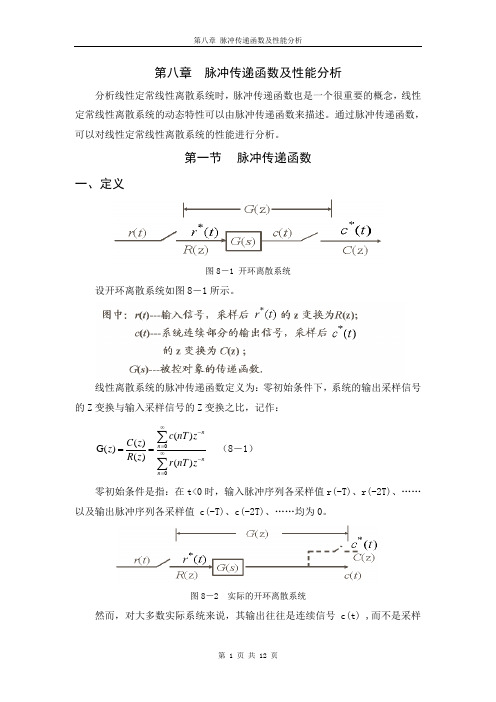
第一节 脉冲传递函数一、定义图8-1 开环离散系统设开环离散系统如图8-1所示。
线性离散系统的脉冲传递函数定义为:零初始条件下,系统的输出采样信号的Z 变换与输入采样信号的Z 变换之比,记作:()()G ()()()nn nn c nT zC z z R z r nT z∞-=∞-===∑∑ (8-1)零初始条件是指:在t<0时,输入脉冲序列各采样值r(-T)、r(-2T)、……以及输出脉冲序列各采样值 c(-T)、c(-2T)、……均为0。
图8-2 实际的开环离散系统然而,对大多数实际系统来说,其输出往往是连续信号 c(t) ,而不是采样信号*()c t,如图8-2所示。
此时,可以在系统输出端虚设一个理想采样开关,如图8-2中虚线所示。
它与输入采样开关同步工作,并具有相同的采样周期。
如果系统的实际输出c(t)比较平滑,且采样频率较高,则可由*()c t近似描述c(t)。
必须指出,虚设的采样开关是不存在的,它只是表明了脉冲传递函数所能描述的,只是输出连续函数在采样时刻上的离散值*()c t。
二、脉冲传递函数的求法1、由差分方程求(1)令初始条件为零,对差分方程两边作为z变换(查z变换表及用z变换定理);(2)据脉冲传递函数的定义G(z)=C(z)/R(z),求出脉冲传递函数G(z)。
2、由系统方块图求脉冲传递函数同样可以用方块图表示。
求取脉冲传递函数时,可以利用方块图变换来实现。
但是,在离散系统的方块图中,除了信号线、函数方块、引出点和比较点,还增加了采样开关。
连续系统的方块图分析法,不能照搬到离散系统。
第二节开环系统脉冲传递函数一、串联环节1、离散环节串联——串联环节之间有采样开关等效的脉冲传递函数等于各环节脉冲传递函数之乘积,即G(z)=Z[G1(s)]*Z[G2(s)]=G1(z)G2(z) 图8-3 离散环节串联2、连续环节串联——串联环节之间无采样开关等效的脉冲传递函数等于各环节传递函数乘积之z变换,即G(z)=Z[G1(s)G2(s)]= G1G2(z)。
永磁同步电机闭环控制的传递函数

永磁同步电机闭环控制的传递函数【最新版】目录一、永磁同步电机闭环控制的概述二、永磁同步电机闭环控制的传递函数1.传递函数的定义2.永磁同步电机闭环控制中的传递函数3.传递函数的应用三、永磁同步电机闭环控制的设计方法1.控制系统的设计2.控制器的设计3.控制算法的设计四、永磁同步电机闭环控制的性能分析1.控制系统的稳定性分析2.控制器的性能分析3.控制算法的性能分析五、永磁同步电机闭环控制的应用实例1.永磁同步电机的位置控制2.永磁同步电机的转速控制3.永磁同步电机的矢量控制六、永磁同步电机闭环控制的发展趋势1.控制理论的发展2.控制算法的优化3.应用领域的扩展正文一、永磁同步电机闭环控制的概述永磁同步电机(Permanent Magnet Synchronous Motor,简称 PMSM)是一种采用永磁材料作为磁场源的同步电机,具有高效率、高功率因数、低噪音等优点,在工业、航空航天、交通运输等领域得到广泛应用。
为了实现对永磁同步电机的精确控制,需要采用闭环控制技术。
闭环控制是指通过将系统的输出反馈到输入端,对系统进行实时调节,以达到预定的控制目标。
永磁同步电机闭环控制主要包括电流控制、转速控制和矢量控制等。
二、永磁同步电机闭环控制的传递函数1.传递函数的定义传递函数是指系统输出与输入之间的传递关系,用以描述系统对输入信号的响应特性。
在永磁同步电机闭环控制中,传递函数主要用于分析系统的稳定性和动态性能。
2.永磁同步电机闭环控制中的传递函数永磁同步电机闭环控制的传递函数主要包括电流环传递函数、转速环传递函数和矢量控制环传递函数。
这些传递函数分别描述了电流、转速和磁场等控制变量对永磁同步电机输出力的影响关系。
3.传递函数的应用传递函数在永磁同步电机闭环控制中的应用主要体现在以下几个方面:(1) 分析系统的稳定性:通过分析传递函数的极点与零点分布,可以判断系统是否稳定,以及稳定范围内的动态性能。
(2) 设计控制器:根据传递函数的特性,可以设计合适的控制器,以实现对永磁同步电机的精确控制。