AB集成运动控制系统培训手册
2024版年度abplc培训总结与资料快速入门

23
06
未来展望与计划
2024/2/2
24
abplc技术发展趋势
2024/2/2
智能化和自动化
01
随着工业4.0的推进,abplc技术将更加注重智能化和自动化的
发展,实现更高效的生产流程。
模块化设计
02
为了方便维护和升级,abplc技术将趋向于模块化设计,使得系
统更加灵活和可扩展。
云计算和大数据应用
03
云计算和大数据技术的发展将为abplc技术提供更多的数据处理
和分析能力,进一步优化生产流程。
25
后续培训课程安排
01
02
03
进阶课程
针对已完成基础培训的学 员,提供进阶课程,深入 讲解abplc的高级功能和 应用。
2024/2/2
实战演练
组织学员进行实际项目的 操作演练,提高学员的实 际操作能力。
通过实际操作和案例分析,培 养学员解决实际问题的能力。
增强学员对工业自动化领域的 认识,为其职业发展打下基础。
5
预期学习成果
01
掌握abplc的基本原理、 硬件组成和软件编程方 法。
2024/2/2
02
熟悉abplc的常用指令和 功能块,能够编写简单 的控制程序。
03
了解abplc的通信协议和 网络配置方法,能够实 现与上位机或其他设备 的通信。
《ABPLC网络通信与组态》
重点介绍了ABPLC的网络通信技术和组态方法,包括以太网通信、串行通信、DeviceNet等 网络通信方式的配置和应用。
2024/2/2
《ABPLC运动控制实战手册》
AB运动控制系统讲义_1

Sercos运动控制系统的组态主要有以下几个步骤:一:创建运动控制工程,并设置协调系统时间(CST)。
二:组态Sercos接口模块。
三:组态伺服驱动器(伺服放大器)。
四:组态一个运动组。
五:组态轴的属性。
Logix 5000软件界面如下图所示:一:创建运动控制工程,并设置协调系统时间(CST)1:创建运动控制工程:点击菜单“File---New…”(File [faɪl]:文件。
New [nju:]:新的)或者点击工具栏中的“New”图标,弹出“New Controller”(新控制器__Controller [kənˈtrəʊlə(r)]:控制器)对话框。
如下图所示。
Vendor[vendə(r)]:供应商。
默认是Allen-Bradley(即AB公司)Type[taɪp]:型号,类型。
即所用的控制器型号。
默认是1756-L61 ControlLogix5561 Controler,点击右边向下的三角符号,可以从下拉列表中选择实际所使用的控制器型号。
如下图所示。
Revision[rɪˈvɪʒn]:修订版本。
Redundancy Enabled:启用冗余(Redundancy[rɪˈdʌndənsi]:冗余。
Enabled[e'neɪbld]:激活,启用,使能)。
在构建互为冗余的控制系统时才启用,一般控制系统不需要启用。
Name [neɪm]:名称。
新建工程的名称。
这里输入“Lab”。
Description [dɪˈskrɪpʃn]:描述。
Chassis Type:机架类型(Chassis [ˈʃæsi]:底盘;底架;机架)。
默认是1756-A10 10-Slot ControlLogix Chassis(共10槽的ControlLogix机架),点击右边向下的三角符号,可以从下拉列表中选择实际所使用的机架型号。
Slot[slɒt]:槽号,槽位置。
指定控制器在机架上所安装的槽号(注意:槽号是从0号开始的)。
AB-PLC培训教材PPT课件

6
1.SLC500 处理器模块
• 灯指示
(Confidential – For Internal Use Only) Copyright © 2007 Rockwell Automation, Inc. All rights reserved.
7
2.SLC500 电源, 机架及本地I/O扩展
• Input voltage of 120/240 VAC for P1, P2, P4 • Input voltage of 24 VDC for P3
OUTPUT 0 4 8 12 1 5 9 13 2 6 10 14 3 7 11 15
TRIAC
Chassis 1
Chassis 2
可编辑
Chassis 3
8
3.SLC500常用IO模块介绍
1746-I/O模块种类:
1) 开关量输入模块: 1746-IB16,16个输入点. 2) 开关量输出模块: 1746-OW16,16个输出点. 3) 模拟量输入模块: 1746-NI8,8个输入通道.1746-NI4 4个输入通道.
1.1 切断电源 1.2 将模块的电
路板对准机架的导向槽. 1.3 轻轻将模块滑动推进,
直到顶部和底部的定位 锁销被卡紧固定. 1.4 拆卸模块时,按下模块顶 部和底部的定位锁销,再将 模块滑动拉出.
方便换模块
模块上的接线端子可以拆下,
(Confidential – For Internal Use Only) Copyright © 2007 Rockwell Automation, Inc. All rights reserved.
第八讲:AB触摸屏硬件及软件简介 第九讲:AB触摸屏程序上下载.
ABPLC培训教材

培训教材第一天培训内容——熟悉硬件和软件一、熟悉各硬件请查看各模块的外形,通讯模块,I/O模块,运动控制模块,处理器模块。
框架式设计可靠,安装容易,无需工具。
端子可取下,接线方便,更换快速。
将DEMO上电,插入ENBT/ENET, CNB通讯模块以及I/O模块(可以先不插入CPU)。
体会模块的带电热插拔特性。
安装方便。
二、认识RSLinx软件1、什么是RSLinx?RSLinx软件是工业通讯的枢纽。
它为所有的AB网络提供了完整的驱动程序。
通过RSLinx软件,用户可以通过一个窗口查看所有活动网络,也可以通过一个或多个通讯接口同时运行任何所支持的应用程序的组合。
RSLinx提供最快速的OPC、DDE和Custom C/C++的接口。
RSLinx还可以为用户提供多个网络、本地工作站和DDE/OPC性能诊断工具,便于进行系统维护和故障排错。
RSLinx Gateway驱动程序能够完美地支持TCP/IP客户与AB PLC控制器的连接,它也支持与远程OPC进行通讯。
RSLogix RSViewRSLinxControlNet DeviceNet EtherNet/IPPLC-5 SLC ControlLogix FlexLogix CompactLogix2、使用RSLinx软件进行通讯1) 打开RSLinx,点击或2) 在工具条上点击选择Ethernet Devices(其它的驱动程序简单介绍), 按下 Add New 键单击 OK.3) 增加以太网设备单击OK.4) 单击 Close5) 检查击计算机的IP设定。
确认为: 192.168.1.XXX.6) 单击。
可以看到,我们不需要CPU,就可以通讯。
减少CPU负荷,提高通讯效率。
保证实时性,可重复性。
7)展开树形。
所有模块信息可以自动浏览得到。
方便维护,调试。
8)插入CPU模块。
无槽位限制,可扩展性好。
例如:当需要多个以太网时,不用放在前几个槽位。
在03槽,1756- L55上点击Device Properties.显示CPU 信息。
AB PLC 培训总结、资料(有图快速入门)
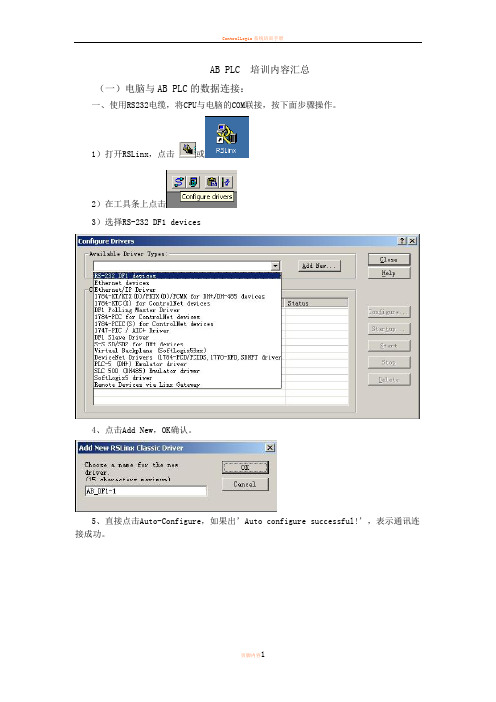
AB PLC 培训内容汇总(一)电脑与AB PLC的数据连接:一、使用RS232电缆,将CPU与电脑的COM联接,按下面步骤操作。
1)打开RSLinx,点击或2)在工具条上点击3)选择RS-232 DF1 devices4、点击Add New,OK确认。
5、直接点击Auto-Configure,如果出’Auto configure successful!’,表示通讯连接成功。
6、直接点击ok即可。
7、单击,通过上述方式查看硬件网络结构。
8、网络结构如下:二、通过以太网电缆,将电脑与PLC机架上的以太网模块1756-ENBT连接,分如下两种方法设置。
1、使用分配IP地址方法,连接PLC。
1)打开RSLinx,点击或2)在工具条上点击3)选择Ethernet Devices, 按下 Add New 键4)单击 OK.5)输入与电脑设置在一个网段上的以太网设备的IP地址,并确定即可。
在configure Driver 中增加新IP地址,可以访问其它站点。
6)单击,通过上述方式查看硬件网络结构如下:2、通过自动获取IP地址的方式连接PLC1)打开RSLinx,点击或2)在工具条上点击3)选择Ethernet /IP Driver, 按下 Add New 键4)单击 OK5)选择本地子网,确定即可。
6)单击,通过上述方式查看硬件网络结构。
注:这是AB软件的一个特点:模块在网络上的通透性。
可以看到任何一级网络的模块,包括以太网,Controlnet网络和Deviecenet网络的各种模块。
(二)RSLogix 5000硬件组态:1、双击桌面图标进入RSLogix 5000软件下面是RSLogix 5000编程界面。
2、新建工程。
3、设置参数如下。
Revision: Logix 平台,提供了固件升级手段。
注意:CPU的硬件版本一定要和软件版本一致。
Type:在Type下拉菜单中你可选择基于Logix 平台的选择多种处理器。
AB PLC ControlLogix系统基础培训手册
AB PLC ControlLogix系统基础培训手册ControlLogix基础培训手册罗克韦尔自动化自动操纵及信息产品集团中国.济南ControlLogix基础培训手册目录常用工具通讯治理工具RSLinx模块升级工具ControlFLASHControlLogix编程指南ControlLogix平台简介Logix5000编程软件快速入门安装操纵器创建及下载工程创建工程添加模块改变模块属性查看I/O创建标签(Tag)利用不名标签(Alias Tag)记录I/O输入梯形图程序下载工程查看程序扫描时刻查看操纵器内存使用情形梯形图常用指令功能块图编程与过程操纵常用工具通讯治理工具RSLinxRSLinx是罗克韦尔自动化公司为用户提供的通讯治理软件,它运行在Windows操作系统的运算机上。
用户只需选择一种从该运算机到工业操纵网络上任一模块的通讯方式,就能够通过该软件建立起与工业操纵网络上所有设备的通讯。
RSLinx操作举例(运算机到Logix处理器为串口连接):用户选择从运算机到网络的通讯方式:串口方式用户检查运算机上有关通讯卡是否差不多安装,连接电缆是否正确:使用1756-CP3连接运算机和处理器。
点击RSLinx“communication(通讯)”下拉菜单中的“Configure Driver s(配置驱动方式)”选项。
在“available drivers(可用驱动方式)”中选择“RS-232 DF1 device s”,再点击“add new”选项,并选择OK。
在弹出的“Configure RS-232 DF1 devices”菜单中点击“auto-configur e(自动配置)”,等待运行结果后选择OK。
点击RSLinx“communication(通讯)”下拉菜单中的“RSWho”选项,就会弹出整个工业操纵网络的树状扫瞄画面(见下图)。
注:用户还可点击扫瞄画面中的“”,以进一步扫瞄其所延伸的网段。
《ABplc培训教程》PPT课件
自1969年推出第一款PLC以来,ABplc不断发展和创新,逐渐成为工业自动化 领域的重要控制设备之一。
ABplc应用领域
01
02
03
04
工业自动化
ABplc广泛应用于各种工业自 动化生产线和设备中,如机床、
包装机械、印刷机械等。
能源管理
在电力、石油、天然气等能源 管理领域,ABplc可实现能源
及时备份
定期备份PLC程序及数据,以防意外丢失。
预防性维护
根据使用情况,对PLC进行预防性维护,如 清洁、紧固接线端子等。
更新与升级
关注厂家发布的更新与升级信息,及时对 PLC系统进行更新与升级。
07
ABplc在工业自动化领域 应用案例
生产线自动化控制系统设计案例
生产线设备监控与数据采集
通过ABplc实现生产线设备的实时监控和数据采集,提高生产效 率和设备利用率。
数据类型与变量定义
数据类型
ABplc支持多种数据类型,包括位(BOOL)、字节 (BYTE)、字(WORD)、双字(DWORD)、整数 (INT)、双整数(DINT)、浮点数(REAL)等。
变量定义 在ABplc中,变量是用于存储数据的容器,可以根据需要 定义不同类型的变量,如输入变量、输出变量、内部变量 等。
编程语言与指令系统
• Function Block Diagram(FBD):功能块图语言,以功 能块为单位进行编程,适合模块化设计。
编程语言与指令系统
基本指令
01
包括逻辑运算、算术运算、比较运算等;
特殊指令
02
如定时器、计数器、中断处理等;
系统指令
03
用于系统配置、通信等。
培训体系ABPLC培训文件
(培训体系)ABPLC培训文件ABPLC及网络通讯培训课件大连重工·起重集团电控设研部2007-4前言为方便设计和调试人员尽快了解和学会应用AB最新PLC系统和最新编程软件RSLogix5000,利用实验室的现有设备对AB公司PLC系统熟悉和掌握,且总结出实验材料。
1、了解ControlLogix控制器、FlexLogix控制器、CompactLogix控制器。
2、AB软件RSLogix5000应用。
3、RSLogix5000软件平台上采用RS232和EtherNet-IP网络方式编程。
4、AB软件上组成EtherNet-IP网络及通讯。
5、AB软件上组成ControlNet网络及通讯。
6、AB软件上组成DeviceNet网络及通讯。
通过该实验材料的实验室动手实验,每个人能够很快掌握AB公司最新PLC 的硬件组态和软件编程。
目录第壹节硬件和软件介绍6第二节通讯实验8第三节硬件升级16第四节 RSLogix5000硬件组态19第五节 ControlNet网络规划27第六节简单的编程33第七节 AB的网络38第壹节硬件和软件介绍壹、根据实验室模板熟悉AB公司PLC各系列模块1)PLC5大型(实验室无此硬件)2)SLC5003)LOGIX系列CompactLogix FlexLogix ControlLogix DriveLogix SoftLogix4)POINTI/O,远程分站I/O.内容:1)查见各模块的外形,通讯模块,I/O模块,处理器模块等。
2)ControlLogix框架式设计可靠,安装容易,无需工具。
端子可取下,接线方便,更换快速。
主要以此系列PLC作为培训内容3)可带电热插拔。
安装方便。
4)有多种网络通讯模块二、配套软件名称1)通讯平台软件:RSLinx;2)Logix系列PL C编程软件:RSLogix5000;3)网络规划软件(控制网):RSNetWorxforControlNet;4)网络规划软件(以太网):RSNetWorxforEtherNet-IP;5)网络规划软件(设备网):RSNetWorxforDeviceNet;6)上位机软件:RSView32;7)P enelViewPlus触摸屏软件:RSViewStudioforSE(ME);三、硬件和软件的版本(见表)表壹、软件版本号表二、CPU硬件版本号1、对于硬件主要考虑CPU和通讯模块的硬件版本号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
WOD动手实验室集成运动控制系统Motion Control On Logix培训实验教材欢迎来到WOD的动手实验室这个实验,将展示Kinetix集成运动控制的如下理念:À提高使用效率、并节省时间À强大功能和卓越的性能在这个实验中您将学习到RSLogix 5000 软件环境――罗克韦尔的集成运动解决方案中配置、编程和调试以及故障诊断的唯一软件工具,以及在这样一个简单的环境中方便的调整和规划您的运动过程。
通过如下的步骤,您将轻松的体验到如何创建一个集成化的运动控制系统À通过使用RSLogix 5000创建和配置运动轴À学习一些基本的运动控制指令并学习编写运动控制的程序À高级运动指令的学习。
在这个实验中您将会知道Logix 是如何帮助您在减少软硬件的数量的同时又使得在控制系统中对大量数据、信息的访问更加灵活方便。
实验设备和材料:在这个实验中您将需要如下软硬件材料*软件您的PC电脑需要安装RSLogix5000 和RSLinx*硬件1756- Lxx 控制器模块 11756-ENBT 以太网模块 11756-M0xSE 光纤伺服模块 11756-PAx 电源模块 1伺服驱动DEMO 一套,其中包括在您开始这个实验之前,请先确认以上软硬件是否已经到位,并且按照正确的方法安装并连线,如果准备就绪,您现在可以开始今天的实验了。
一.离线(OFF LINE)创建和配置运动轴1.打开RSLogix5000。
从‘File’菜单或在快捷按钮条中选择新建‘New’。
2.在‘Controller Type’中选择控制器、电源板以及在电源板上的槽号,命名程序名称,以及确定程序的存储路径。
3.点击‘OK’后,将看到如下的窗口。
4.打开控制器属性的窗口,选择‘Date/Time’的页面,在‘Make this controller the Coordinated System Time master’选项处打勾。
5.右键点击‘1756 Backplane’,选择‘New Module…’6.在新建模块窗口中,下拉‘Motion’选择‘1768-M0xSE’模块。
7.点击‘OK’后,弹出如下界面。
为新建模块命名,选择模块的插槽号。
点击‘OK’确认。
8.此时,在I/O 配置中将看到1768总线下的SERCOS网络。
如下图。
9.此时右键点击‘Motion Group’,选择‘New Motion Group …’以建立运动组。
10.在如下窗口中建立新的运动组。
11.右键点击新建后的运动组,按照下图新建伺服轴驱动。
12.在如下窗口中建立新的伺服驱动轴AXIS_1。
13.按照同样步骤新建伺服驱动轴AXIS_2,之后看到在运动组中配置如下。
14.右键点击SERCOS网络或模块,选择新建模块。
15.弹出选择模块的窗口后,按照DEMO选择相应的伺服驱动器型号。
16.为新建的驱动器命名,按照DEMO配置选择节点地址,按OK以确认配置。
17.此时弹出如下窗口,选择‘Associated Axes’页面,选择相应的运动组中的关联驱动轴。
18.点击OK以确认配置,之后按照同样步骤配置其他的伺服驱动器,完成后I/O配置如下。
19.双击运动组中的AXIS_1打开轴的属性,弹出如下窗口。
20.在‘Conversion’页面中确定运动方式为‘旋转’或‘直线’。
21.在‘Units’页面中选择合适的负载坐标的单位。
(注意:此单位即为该轴在程序中可以直接使用的运行单位,如直线负载可以为‘mm’、‘cm’、或者‘inch’,而旋转负载则为‘deg’、‘rev’或者‘rad’等等。
)22.选择‘Drive/Motor’页面,如下。
确认合适驱动器型号。
23.点击‘Change Catalog..’后弹出如下窗口,选择相应的伺服电机型号,点击OK以确认。
24.在22 步骤的页面中点击‘Calculate…’,计算实际设备中传动比例。
点击计算并更新传动比的参数,之后关闭该窗口。
25.此时看到如下窗口。
若在‘Drive Enable Input Checking’前打勾,表明该伺服驱动器必须在硬件使能触点接通的情况下,才允许使能;否则只要通过软件即可直接控制伺服驱动器的使能。
26.通过以上的步骤,就已经完成了该DEMO的最基本配置,确认所有参数都正确以后,您就已经可以将以上的参数下载的控制器中了。
二.在线(ON LINE)配置并测试各轴在下载程序之前,确认RSLinx 已经打开并且在屏幕右下方功能条中有RSLinx 的图标显示,如下图配置您的计算机的以太网网络的TCP/IP地址,确认其与1768-ENBT模块上显示的地址在同一个网段。
单击打开RSLinx 窗口,确认网络连接配置以及RSLinx的设置正确后,应该在Workstatioin 中可以在RSLinx 中可以看到1768-L43的控制器以及网络中的其他模块,如下图。
1.在RSLogix5000菜单中选择Communication-》Who Active,打开如下窗口,选择控制器,点击Download。
2.按Download确认将刚才配置的程序下载到选择的控制器中。
3.按‘Yes’将控制器切换到‘Remote Run’(即远程运行)状态4.此时即可看到如下的窗口画面。
5.接下来我们就可以测试和运行伺服轴了。
打开运动组‘Motion Group’,双击AXIS_1打开该轴的属性,并切换到‘Hookup’页面,如下图。
在‘Test Increment’中填入测试所需的距离,如360度。
按‘Test Marker…’6.此时系统开始测试电机的‘Marker’,按照提示手动转动测试轴。
7.当完成的页面显示如下时,表明电机‘Marker’反馈正确。
8.在页面5的窗口中按‘Test Feedback…’,此时系统开始测试电机的位置反馈,按照提示和先前填入的测试距离手动转动测试轴。
9.当完成页面显示如下时,表明电机的位置反馈正确。
10.在页面5的窗口中按‘Test Command & Feedback…’,此时系统开始完整测试电机的给定和反馈,此时系统显示如下窗口提示电机运转并请注意轴旋转方向,按‘Yes’确认执行此命令。
11.测试开始执行,电机开始旋转,此时需注意该轴运转的方向,以及电机运转是否有异常。
12.当电机停止运转,显示如下窗口,按‘OK’以确认。
13.按‘Yes’或‘No’确认轴的运转方向是否为正方向。
14.系统根据选择更新并保存此设置。
15.完成方向更新后按‘OK’确认。
※完成以上步骤后,表明系统硬件连线是正确的,您可以进行进一步的运行测试了。
16.切换到‘Tune’页面,测试轴负载,并整定系统参数。
填入运行范围和运行速度,按‘Start Tuning…’开始自整定。
17.系统准备开始整定,如下页面提示系统电机将开始运转,按‘Yes’确认电机运行。
18.电机正常运转完成后显示如下窗口,按‘OK’确认。
19.系统测试出位置环频响和负载惯量大小,按‘OK’确认测试结果。
20.系统更新并保存测试结果,按‘OK’确认。
21.系统完成保存,按‘OK’确认。
22.按照5~21的步骤测试轴‘AXIS_2’。
※经过以上步骤,您就已经完成了运行以上伺服轴运行前的基本测试;接下来您就可以通过指令运行各轴了。
三.通过直接命令控制各轴的运动1.右键点击AXIS_1,选择‘Motion Direct Commands…’====2.看到如下窗口,在左侧有很多运动控制指令。
通过选择其中的指令,配置正确的参数,然后按‘Execute’,通过观察驱动和电机的动作,理解各个指令的意义。
有关具体各指令的说明,可以通过帮助了解。
以下简单介绍几个基本运动指令。
3.MSO-用来启动使能选中的轴,打开该轴驱动的控制环。
当执行此指令时,可以看到驱动器上的BUS指示灯由绿色闪烁转为绿色常亮,表明控制环打开正常。
此时用手试图旋转电机,是什么反映?打开Controller Tags中的Axis_1.DriveEnableStatus,观察此TAG 应为1。
4.MSF-与MSO相反,用来解除选中轴的使能,关闭该轴驱动的控制环。
当执行此指令时,可以看到驱动器上的BUS指示灯由绿色常亮转为绿色闪烁,表明控制环关闭正常。
此时用手试图转动电机,是什么放映?打开Controller Tags中的Axis_1.DriveEnableStatus,观察此TAG 应为0。
5.MAJ-用此指令给轴以特定速度运行。
参数如下窗口。
先按照步骤3运行MSO, 然后选择上述窗口,填入所需的速度、加速度、方向等等,按执行。
观察电机的旋转,若电机已经开始旋转,则观察标签:Axis_1.ActualVelocity 的值,应为参数中填写的速度值,说明,电机正按照给定的速度运行。
6.MAS-用此指令来停止轴的运动。
如下窗口:如果电机正在处在运转状态,执行此指令可以停止轴的运转。
观察Axis_1.ActualVelocity 的值,此时应为‘0’。
※问题:此指令MAS 和MSF 有什么区别,请说明?7.MAM-用此指令来完成轴的定位。
如下窗口:运行步骤3,打开上述窗口,填入相应的参数如:定位类型、位置、速度等,按执行,观察电机的运行,并且在运行前后观察标签:Axis_1.ActualPosition 的变化。
通过改变运行参数,观察轴的运行状态,理解该指令的意义。
※问题:说明相对移动和绝对移动的区别。
四.编写运动控制程序通过以上的学习,我们已经了解了一些简单的运动控制指令。
在以下的课程中我们将通过在梯形图程序调用这些运动控制指令,来完成轴的特定运动。
为了更好的完成以下的学习内容,您必须具备基本的logix的编程的能力,并已经完全掌握了以上前3章的内容。
另外,在整个过程中,由于电机的旋转,请在整个过程中注意安全。
1.速度控制:编写如下程序,并DOWNLOAD到CPU 中,通过接通‘servo on’使轴axis_1使能,通过jog speed 给定一个特定的速度,然后通过接通‘jog_start_1’,观察轴的运动状态。
通过接通stop_1,使得该轴停止转动。
※练习:编写一段程序,可以动态修改轴2的速度。
2.位置控制:在原来程序中,增加如下程序。
接通move_start_1,观察轴的运动状态。
※练习:在趋势图中监测Axis_1.ActualVelocity,改变MAM中的profile参数,理解‘梯形’曲线和‘S曲线’的意义。
3.同步控制:按照步骤1使轴1使能并处于停止状态。
通过配置MAG指令,轴1作为从轴,轴2作为主轴;接通gear up,此时MAG指令的IP位应接通。
此时,手动或者通过程序转动主轴轴2,观察轴1的动作,是否两个轴同步,实现了电子齿轮的功能。