2012-02-27'第1章(1.4常用坐标系及变换)(3学时)
数学中的坐标系与坐标变换

数学中的坐标系与坐标变换数学是一门广泛应用于各个领域的学科,而坐标系和坐标变换则是数学中的重要概念。
本文将介绍什么是坐标系,坐标变换的概念以及它们在数学和现实生活中的应用。
一、坐标系坐标系是在某一平面或空间中确定点的位置的一种方式。
它由坐标轴和原点组成。
常见的坐标系包括二维笛卡尔坐标系和三维笛卡尔坐标系。
1. 二维笛卡尔坐标系二维笛卡尔坐标系由两条垂直的数轴组成,通常称为x轴和y轴。
原点是坐标系的交点,用(0,0)表示。
在二维笛卡尔坐标系中,每个点都可以表示为一个有序对(x, y),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标。
2. 三维笛卡尔坐标系三维笛卡尔坐标系在二维笛卡尔坐标系的基础上增加了一条垂直于x轴和y轴的z轴。
在三维笛卡尔坐标系中,每个点都可以表示为一个有序组(x, y, z),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标,z表示点在z轴上的坐标。
二、坐标变换坐标变换是指将一个点的坐标从一个坐标系转换到另一个坐标系的过程。
坐标变换在数学和物理学中都有着广泛的应用。
1. 平移平移是一种坐标变换,通过向所有的点添加一个常量向量,从而将一个坐标系中的点转换到另一个坐标系中。
例如,将一个点的坐标由(x, y)变为(x+a, y+b),其中(a, b)表示平移的向量。
2. 旋转旋转是一种坐标变换,通过围绕一个给定的中心点将点按照一定角度旋转,从而将一个坐标系中的点转换到另一个坐标系中。
旋转可以使用旋转矩阵或旋转角度表示。
3. 缩放缩放是一种坐标变换,通过改变点的坐标的比例,从而将一个坐标系中的点转换到另一个坐标系中。
缩放可以使点的坐标变大或变小,可以根据缩放因子在x方向和y方向上进行分别缩放。
三、数学与现实生活中的应用坐标系和坐标变换在数学和现实生活中有着广泛的应用。
以下是一些常见的应用情景:1. 几何学中的图形表示:坐标系可以用来表示几何图形,例如在平面上绘制直线、圆等图形,或者在空间中绘制立方体、球体等图形。
常用坐标系

常用坐标系坐标系是一种以规定的坐标系原点为中心的空间坐标系统,是在某一空间形体上,用于记录和表示空间位置的标准系统。
每一个坐标系都有一个原点,两个正交坐标轴,三条定义坐标轴之间的角度方向均为正,则此坐标系称为直角坐标系。
坐标系既可以用来记录某点的位置,也可以记录物体的运动轨迹,可以在多维空间形成一个系统的记录距离的测量方法。
二、常用的坐标系1、直角坐标系其中最常用的就是二维和三维直角坐标系,在二维直角坐标系中,使用x和y两个轴来表示一个点,其中x轴和y轴都是正交的,而且坐标轴之间的角度方向均为正,样的坐标系我们称之为直角坐标系。
而在三维直角坐标系中,在原来的基础上,我们又加上了一个z轴,同样也是正交的,以此构建出来的坐标系叫做三维直角坐标系。
它们可以用来表示任何的二维和三维的场景。
2、极坐标系极坐标系是由一个原点,一个极轴和一个半径轴组成的。
极轴和半径轴都是以原点为起点,从原点出发,极轴一直向正方向延伸,而半径轴则是从原点指向极轴的垂直向量。
极坐标系的特点在于它可以表示我们观察的某一物体的位置和某一物体的运动状态,比如飞机的飞行轨迹,自车的行驶路径等等。
3、椭圆坐标系椭圆坐标系是一种可以用来描述椭圆的坐标系。
它包括一个准椭圆形的坐标平面,两个正交的定义坐标系,椭圆的圆心及椭圆的长轴和短轴。
椭圆坐标系可以用来描述物体在椭圆上的运动轨迹,比如它可以用来分析行星的椭圆运行轨道,也可以用来描述电子电路中的椭圆信号,这是椭圆坐标系最常见的应用之一。
三、坐标系在科学研究中的应用1、工程学:在工程学中,坐标系被用来描述工程数据中的各种物体的位置参数,运动轨迹等,充分利用坐标系的可视化功能,可以简化设计计算的过程。
2、生物学:在生物学中,坐标系可以用来描述细胞的位置,表明细胞的运动轨迹,甚至可以用来描述组织或细胞的增殖情况,从而更加直观、清晰地了解病理演变过程。
3、地理学:地理学也是一个非常重要的应用领域。
坐标系可以用来描述地形、地貌、以及地球上不同物体的位置、分布情况等,充分利用坐标系的可视化,可以让地理学家更加直观的分析地形地貌的变化情况,从而更好的实现地球资源的有效利用。
第1讲坐标系种类及坐标转换

第1讲坐标系种类及坐标转换在数学和物理学中,坐标系是用于表示和定位点的一组数学规则。
它可以帮助我们在平面或空间中精确地描述和测量位置、方向和距离。
坐标系通常由坐标轴和原点组成,坐标轴是一条直线,它们与原点形成直角。
有多种类型的坐标系,每一种都有特定的用途和应用。
以下是常见的几种坐标系:1.直角坐标系:直角坐标系也称为笛卡尔坐标系,是最常见的坐标系。
它由两条垂直的坐标轴和一个原点组成。
坐标轴可以是水平的x轴和垂直的y轴,或者在三维空间中可以加上一个垂直的z轴。
直角坐标系使用(x,y,z)来表示点的坐标,其中x表示点在x轴上的位置,y表示点在y轴上的位置,z表示点在z轴上的位置。
2.极坐标系:极坐标系用于描述平面上的点,它由一个原点和一个角度和距离组成。
极坐标系以原点为中心,用一个角度(通常用弧度表示)表示点与参考线(通常是x轴)之间的角度,用一个距离表示点与原点之间的距离。
极坐标系使用(r,θ)来表示点的坐标,其中r表示点与原点的距离,θ表示点与参考线之间的角度。
3.柱坐标系:柱坐标系是三维空间中的一种坐标系,它由一个原点、一个角度、一个距离和一个高度组成。
柱坐标系类似于极坐标系,但增加了一个垂直的z轴来表示高度。
柱坐标系使用(r,θ,z)来表示点的坐标,其中r表示点与原点的水平距离,θ表示点与参考线(通常是x轴)之间的角度,z表示点的高度。
4.球坐标系:球坐标系也是三维空间中的一种坐标系,它由一个原点、一个纬度、一个经度和一个距离组成。
球坐标系使用(r,θ,φ)来表示点的坐标,其中r表示点与原点的距离,θ表示点与参考线(通常是z轴)之间的纬度,φ表示点在参考平面上的经度。
在不同的坐标系之间进行转换时,我们需要使用特定的转换公式。
以直角坐标系和极坐标系为例,我们可以使用以下公式进行转换:x = r * cos(θ)y = r * sin(θ)r = sqrt(x^2 + y^2)θ = atan2(y, x)这些公式使我们能够在不同坐标系之间相互转换,并确保保持位置的准确性。
常用大地测量坐标系及其变换

常用大地测量 坐标系及其变换
目录
一、参心坐标系 二、地心坐标系 三、不同坐标系之间的变换
第一部分
参心坐标系
参心坐标系
1、参考椭球定位与定向工作
①确定椭球的几何参数(长短半径、扁率)
②确定椭球中心位置(定位)
总地球椭球
地心坐标系
参考椭球
参心坐标系
③确定椭球短轴的指向(定向)
• 椭球短轴平行于地球自转轴 • 大地子午面平行于天文起始子午面
3、2000国家大地坐标系
➢WGS-84椭球主要椭球参数 ➢a=6378137m, ➢α=1/298.257223563 ➢ω=7.292115×10-5rad s-1 ➢GM=3.986004418×1014m3/s2
我国法定大地坐标系
第三部分
不同坐标系之间的变换
不同坐标系之间的变换
1、二维平面直角坐标系间的变换
④建立大地原点
参心坐标系
大地原点
如图:
• 地球空间直角坐标系O1—X1Y1Z1 • 参考椭球上空间直角坐标系和O—XYZ
• 三个平移参数X0、Y0、Z0(用ξk、ηk、Ngk替换X0、Y0、Z0) • 三个绕坐标轴的旋转参数εx、εy 、εz (表示参考椭球的定向)
根据双平行条件:
P(λk,φk,αk,H正k )→ P(Lk,Bk,Ak,Hk ) •
(2) 地心大地坐标系
(B,L,H)
•总地球椭球面 •椭球中心与地球质心重合 •椭球短轴与地球自转轴重合
地心坐标系
2、WGS-84世界大地坐标系
美国国防部,地心坐标系
Z轴指向BIH1984.0定义的协议地球极CTP方向
X轴指向BIH1984.0零度子午面和CTP赤道的交点
常用坐标系之间的关系与转换
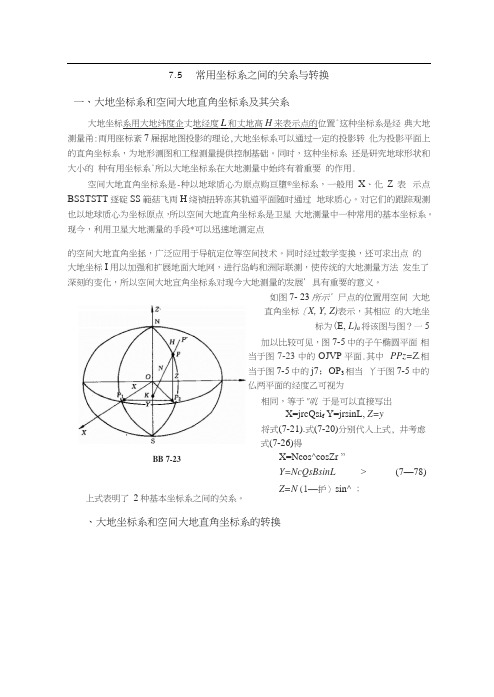
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5上式表明了 2种基本坐标系之间的关系。
加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
坐标系坐标系统及坐标转换PPT课件

21/01282/210/2128
26
当前您正浏览第二十六页,共四十页。
四、坐标系统的转换
一、坐标转换的基本概念
2、大地测量基准的基本概念
所谓基准是指为描述空间位置而定义的点线面。
而大地测量基准是指用以描述地球形状的地球椭球参数,包含描述地球椭球几何特征 的长短半轴和物理特征的有关参数、地球在空间的定位及定向以及描述这些位置所采 用的单位长度的定义。
以上两类都有以下几种表达方式:
空间大地坐标系,即大地经纬度(B,LH)形式;
空间直角坐标系,即三维空间坐标(X,Y,Z)形式;
投影平面直角坐标系,即二维平面坐标(x,y,h)形式
21/01282/210/2128
7
当前您正浏览第七页,共四十页。
二、测量坐标系的分类
2、地球坐标系
地心坐标系:坐标原点位于地球质心
23
当前您正浏览第二十三页,共四十页。
三、我国常用的测量坐标系统
地球椭球:
五个基本几何参数
椭圆的长半轴: a
椭圆的短半轴: b f a b
椭圆的扁率:
a
椭圆的第一偏心率:
e a2 b2 a
椭圆的第二偏心率:
e a2 b2 b
21/01282/210/2128
24
当前您正浏览第二十四页,共四十页。
21/01282/210/2128
2
当前您正浏览第二页,共四十页。
二、测量坐标系的分类
在测量中根据研究对象的不同主要分为两类:
天球坐标系和地球坐标系。
天球坐标系用来描述天体的位置,与地球自转无关,是一种惯性系。
地球坐标系用来描述地面点的位置,随同地球自转。
21/01282/210/2128
常用坐标系及其间的转换
显然,如果发射坐标系与发射惯性坐标系各有一轴与地球转动相平行,那它们之间 方向余弦阵将是很简单的。一般情况下,这两个坐标系对转动轴而言是处于任意的位置。 因此,首先考虑将这两个坐标系经过一定的转动使得相应的新坐标系各有一轴与转动轴 平行,而且要求所转动的欧拉角是已知参数。一般情况下两个坐标的关系如图 1.7 所示。
其中 VG 为方向余弦阵
⎡ ⎢ ⎢
xv0 yv0
⎤ ⎥ ⎥
=
VG
⎡ ⎢ ⎢
x0 y0
⎤ ⎥ ⎥
⎢⎣ zv0 ⎥⎦
⎢⎣ z0 ⎥⎦
(1.7)
⎡
cosθ cosσ
VG = ⎢⎢cosθ sinσ sinν − sinθ cosν
⎢⎣cosθ sinσ cosν + sinθ sinν
sinθ cosσ sinθ sinσ sinν + cosθ cosν sinθ sinσ cosν − cosθ sinν
绕新的侧轴 o1z1 转动 α 角,α 角称为攻角。即达到两个坐标系重合。两个坐标系的欧
拉角关系如图 1.6 所示。图中之α、 β 均为正值方向。因此,可得两个坐标系的方向余
图 1.6 速度坐标系与箭体坐标系关系图 12
弦关系为
⎡ ⎢ ⎢
x10 y10
⎤ ⎥ ⎥
=
BV
⎡ ⎢ ⎢
xv0 yv0
⎤ ⎥ ⎥
图 1.1 发射坐标系之一
图 1.2 发射坐标系之二 7
7. 速度坐标系 o1 − xv yv zv 坐标系原点为火箭的质心。o1xv 轴沿飞行器的飞行速度方向。o1 yv 轴在火箭的主对 称面内,重直 o1xv 轴, o1zv 轴垂直于 xvo1 yv 平面,顺着飞行方向看出, zv 轴指向右方, o1 − xv yv zv 亦为右手直角坐标系。
常用坐标系之间的关系与转换
7.5 常用坐标系之间的关系与转换一、大地坐标系和空间大地直角坐标系及其关系 大地坐标系用大地纬度企丈地经度L 和丈地髙H 来表示点的位置°这种坐标系是经 典大地测量甬:両用座标紊7屜据地图投影的理论,大地坐标系可以通过一定的投影转 化为投影平面上的直角坐标系,为地形测图和工程测量提供控制基础。
同时,这种坐标系 还是研究地球形状和大小的 种有用坐标系°所以大地坐标系在大地测量中始终有着重要 的作用.空间大地直角坐标系是-种以地球质心为原点购亘墮®坐标系,一般用X 、化Z 表 示点BSSTSTT 逐碇SS 範菇飞両H 绕禎扭转冻其轨道平面随时通过 地球质心。
对它们的跟踪观测也以地球质心为坐标原点,所以空间大地直角坐标系是卫星 大地测量中一种常用的基本坐标系。
现今,利用卫星大地测量的手段*可以迅速地测定点的空间大地直角坐拯,广泛应用于导航定位等空间技术。
同时经过数学变换,还可求岀点 的大地坐标I 用以加强和扩展地面大地网,进行岛屿和洲际联测,使传统的大地测量方法 发生了深刻的变化,所以空间大地宜角坐标系对现今大地测量的发展’具有重要的意义。
、大地坐标系和空间大地直角坐标系的转换如图7- 23所示’尸点的位置用空间 大地直角坐标〔X, Y, Z)表示,其相应 的大地坐标为(E, L)a 将该图与图?一5加以比较可见,图7-5中的子午椭圆平面 相当于图7-23中的OJVP 平面.其中 PPz=Z.相当于图7-5中的j7;OP 3相当 丫于图7-5中的仏两平面的经度乙可视为相同,等于"叽 于是可以直接写岀X=jrcQsi f Y=jrsinL, Z=y将式(7-21).式(7-20)分别代入上式, 井考虑式(7-26)得X=Ncos^cosZr ”Y =NcQsBsinL > (7—78)Z=N (1—护〉sin^ ;上式表明了 2种基本坐标系之间的关系。
BB 7-231.由大地坐标求空间大地直角坐标当已知椭球面上任一点P 的大地坐标(B, L)时,可以按式(7-78)直接求该点的 空间大地直角坐标(X, Y, Z)。
常用坐标系及其转换
• WGS-84大地水准面高N等于由GPS定位测定的 点的大地高H减该点的正高H正。N值可以利用地球 重力场模型系数计算得出;也可以用特殊的数学方 法精确计算局部大地水准面高N。一旦N确定,可利 用H正=H-N计算GPS各点的的正高H正。
•
•二、国家大地坐标系(参心坐标系)
•Z
•P
•Π
n
n
•M
•ε •γ
•X
•黄道
•Y
•Π
s
•
•天球球面坐标(α,δ,γ)的定义:
•z
• 天球中心与地球质心M
•P
重合,赤经α为含天轴和
n
春分点的天球子午面与 过天体s的天球子午面之 间的夹角,赤纬δ为原点 M至天体s的连线与天球 赤道面之间的夹角,向
•s
•r •M •δ •z
•α •x
•y
➢ 协议天球坐标系: •或仅作匀速直线运动 • 为了建立一个与惯性坐标系统相接近的坐标 •系,人们通常选择某一时刻,作为标准历元,并将 •此刻地球的瞬时自转轴(指向北极)和地心至瞬时 •春分点的方向,经过瞬时的岁差和章动改正后,分 •别作为X轴和Z轴的指向,由此建立的坐标系称为协 •议天球坐标系。
•
•
➢ GPS定位采用坐标系•,:在空间的位置和方向应保持不变 • 在GPS定位测量中,•或采仅用作匀两速类直线坐运动标。系, •即天球坐标系与地球坐标系,两坐标系的坐 •标原点均在地球的质心,而坐标轴指向不 •同。天球坐标系是一种惯性坐标系,其坐标 •原点及各坐标轴指向在空间保持不变,用于 •描述卫星运行位置和状态。地球坐标系随同 •地球自转,可看作固定在地球上的坐标系, •用于描述地面观测站的位置。
常用坐标系介绍及变换PPT课件
目录
• 常用坐标系介绍 • 坐标变换基础 • 坐标变换的应用 • 坐标变换的数学表达 • 坐标变换的物理意义 • 坐标变换的计算机实现
01
常用坐标系介绍
笛卡尔坐标系
01
02
03
直角坐标系
以原点为中心,x轴、y轴、 z轴分别代表三个相互垂 直的坐标轴,用于描述平 面和空间中的点。
二维坐标变换
总结词
二维坐标变换是指平面内的坐标变化, 包括平移、旋转、缩放等操作。
详细描述
二维坐标变换涉及平面内的点,可以 通过平移、旋转或缩放等操作进行坐 标变化。这种变换在平面几何、图形 处理等领域应用广泛,可以通过矩阵 运算实现快速变换。
三维坐标变换
总结词
三维坐标变换是指空间中的坐标变化,包括平移、旋转、缩放等操作。
详细描述
三维坐标变换涉及空间中的点,可以通过平移、旋转或缩放等操作进行坐标变化。这种变换在三维建模、动画制 作、机器人控制等领域应用广泛,需要使用三维矩阵运算进行实现。
03
坐标变换的应用
图形变换
图形变换是指通过数学方法将一个二维或三维图形在坐标系 中进行平移、旋转、缩放等操作,以达到改变图形位置、大是一种数值计算方法,通过将物体离散化为有限个单元,可 以分析物体的受力情况和形变程度。有限元分析在工程领域中有着广泛 的应用,可以提高设计效率和精度。
06
坐标变换的计算机实现
OpenGL中的坐标变换
投影变换
将三维场景投影到二维屏 幕上,包括正交投影和透 视投影。
视图变换
将场景中的坐标系与观察 者的坐标系进行关联,实 现视景体裁剪。
旋转变换不改变图形的大小和形状, 只改变其方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§1.4.1 导航中常用的坐标系
坐标的作用和区别:
{1,0} {-1,0} {0,2} {2.828, 45度}
6
§1.4.1 导航中常用的坐标系
坐标的转换:球面到平面
7
§1.4.1 导航中常用的坐标系
坐标系的定义: 坐标系是量测物体的质心或质点在空间的相对位置, 以及物体在空间的相对方位所使用的基准线组。 引入坐标系的目的: 1)确切地描述飞行器的运动状态。 2)研究飞行器运动参数的变化规律。 3)便于与时间一起反映物理事件的顺序性和持续性。
§1.4.1 导航中常用的坐标系
c
28
§1.4.1 导航中常用的坐标系
本书中重要的坐标系有: 1. 2. 3. 4. 5. 地心惯性坐标系 地球坐标系 地理坐标系 载体坐标系 导航坐标系
29
§1.4.2 在地球上运动的角速率表达
地理坐标系相对惯性坐标系随载体相 对地球坐标系的位置的变化而变化,载体 相对于地球的运动引起地理坐标系相对于 地球坐标系的转动。
2
第一章
§1.1 §1.2 §1.3 §1.4 §1.5
导航系统概述
导航与大地测量、制导的关系 导航技术发展简史 惯性导航技术发展简况 导航的基本概念和原理 地球形状描述与曲率半径
3
§1.4导航的基本概念和原理
§1.4.1 导航中常用的坐标系 §1.4.2 在地球上运动的角速率表达 §1.4.3 常用坐标系间的变换矩阵 §1.4.4 两种定位的方式及原理
32
§1.4.2 在地球上运动的角速表达
地理坐标系相对于惯性参考坐标系的 转动角速度包括两部分:地理坐标系相对 于地球坐标系的转动角速度和地球坐标系 相对于惯性参考坐标系的转动角速度 。
33Biblioteka §1.4.2 在地球上运动的角速率表达
地球坐标系相对于惯性参考坐标系的转动角速度:
ωie
ze
格林威治子午线 N U E
21
§1.4.1 导航中常用的坐标系
载体(机体)坐标系 (b)
载体坐标系,原点与载体质心重合。 对于飞机、舰船等巡航载体,一般有如下两种: 1)x沿载体横轴向右,y沿载体纵轴向前,z沿载体竖轴向上; 2)x沿载体纵轴向前,y沿载体横轴向右,z沿载体竖轴向下。
22
§1.4.1 导航中常用的坐标系
载体(机体)坐标系 (b):
xe
ω
g egx
vN vN v cosψ = − = − = − OA R+h R+h
vE vE v sinψ ω1 = = = OB ( R + h) cos L ( R + h) cos L
36
ze
ω1 § 1.4.2 g L ωegy ωg
egz
N
U
v 在地球上运动的角速率表达
vN
ω1 v
U
g egy
xeω
vE vE v sinψ ω1 = = = OB ( R + h) cos L ( R + h) cos L
37
§1.4.2 在地球上运动的角速率表达
地理坐标系相对于地球坐标系的转动角速度:
vN v cosψ − = − ω = R+h R+h vE v sinψ g = ωegy = R+h R+h vE v sinψ g tgL tgL = ωegz = R+h R+h
18
§1.4.1 导航中常用的坐标系
地理坐标系相对于惯性参考坐标系的转动角速度
运载体相对于地球的运动引起地理坐标系相对于地球坐标系 的转动。此时,地理坐标系相对于惯性参考坐标系的转动角速度 包括两部分: 1)地理坐标系相对于地球坐标系的转动角速度 2)地球坐标系相对于惯性参考坐标系的转动角速度。
19
惯性坐标系
牛顿
11
§1.4.1 导航中常用的坐标系
惯性坐标系(i)
从银河系中心向其它星系的中心,可以引许多射线. 但在 相当长时间内,距离的变化比起原来的数值可以忽略不 计,因此上述射线彼此间的夹角,在相当长时间内几乎 不变. 这组射线组成的参考系称为银河系中心-河外星系参考系.
Y Z X
12
§1.4.1 导航中常用的坐标系
8
§1.4.1 导航中常用的坐标系
坐标系多样性类比:
坐标系(总名称)——交通工具(总名称) 惯性坐标系( …… )——汽车交通工具(卡车,轿车) 地球坐标系( ……)——自行车交通工具(大自行车,小自行车) 其它坐标系( ……)——步行(大人步行、小孩步行) 寸有所长——尺有所短 不同的坐标系——作用不同 不同种类的交通工具——作用不同
26
§1.4.1 导航中常用的坐标系
平台坐标系(p) 1)描述平台式惯导 系统中平台指向; 2)与平台固连。
X Z Y
27
计算坐标系(c) 惯性导航系统利用本身计算的载体位置来描述导航坐 标系时,这种计算导航坐标系因惯导系统有位置误差 而有误差,该坐标系称为计算坐标系。 一般它在描述惯性导航误差和推导惯性导航系统误差 n 方程时有用。
g egx
38
§1.4.2 在地球上运动的角速率表达
地理坐标系相对于惯性坐标系的转动角速度 在地理系上的投影为:
待续
24
§1.4.1 导航中常用的坐标系
飞行器姿态定义
弹道导弹姿态角是相对于地平坐标系定义的。 地平坐标系(发射点坐标系)原点取在导弹的发射点, y轴在当地水平面内指向目标, z沿当地垂线向上,y和z构成发射平面。 x符合右手规则。
25
§1.4.1 导航中常用的坐标系
导航坐标系(n) 导航坐标系是惯导系统在求解导航参数所用的坐标系。 1)平台式惯导系统,导航坐标系是理想的平台坐标系。 2)捷联式惯导系统,导航坐标系是某个方便的解算系。 陀螺、加速度计信号分解到某个求解导航参数较为方便的 坐标系内进行导航计算,参数并不在(b)坐标系求解。
30
§1.4.2 在地球上运动的角速表达
地理坐标系相对于惯性参考坐标系的 转动角速度包括两部分:地理坐标系相对 于地球坐标系的转动角速度和地球坐标系 相对于惯性参考坐标系的转动角速度 。
31
§1.4.2 在地球上运动的角速率表达
地平坐标系相对于惯性坐标系的转动 角速度可以表示为:地平坐标系相对地球 坐标系的转动角速度 与地球坐标系相对惯 性坐标系的转动角速度 之和。
15
§1.4.1 导航中常用的坐标系
惯性坐标系(i)
Y
发射点惯性坐标系: 原点在发射点上, X轴指向目标点, Y轴为过发射点的垂线, Z轴与X,Y轴构成右手直角坐标系。
(目标方向) X
Z
16
§1.4.1 导航中常用的坐标系
地球坐标系(e) 地球坐标系也称为地心地球固联坐标系 (Earth-Centered, Earth Fixed ECEF) 原点在地心, z轴沿地球自转轴的方向, x在赤道平面内,与零度子午线相交, y在赤道平面内与x,z满足右手法则。 地球坐标系相对于惯性坐 标系的转动角速度为:
ω 地理坐标系相对于地球坐标系的转动角速度: A g E
g egx
Aψ
vE
ωegx
O
λ
L
B
ye
vE vE v sinψ ω cos = = = L L = 1 cos ( R + h) cos L R+h R+h vE vE v sinψ g ωegz ω sin L = = = = tgL tgL 1 sin L ( R + h) cos L R+h R+h
4
§1.4.1 导航中常用的坐标系
坐标系(coordinate system):
从数量上确定物体相对与参考系的位置,需要在参考系上 选用一个固定的坐标系。 常用坐标系: 直角坐标系( x,y,z );二维情形:( x,y )。 球极坐标系(r ,θ , φ )。 柱坐标系( r, φ ,z ), 平面极坐标系(r , φ )。 自然“坐标系”(它不同于前面所说的坐标系,它在 没有给定运动轨迹时无法选定)。
1
定位与导航系统
第一章 导航系统概论 第二章 惯性导航系统 第三章 全球卫星定位导航 第四章 无线电、天文和其它导航系统 第五章卡尔曼滤波及其在导航中的应用 第六章 组合导航 实验
南京航空航天大学导航研究中心(/)-刘建业、赵伟(025-84892304),2012年版
17
§1.4.1 导航中常用的坐标系
地理坐标系(n)
地理坐标系,也称当地垂线坐标系。 原点位于运载体所在点, z轴沿的当地地理垂线的方向, x,y轴在当地水平面内沿当地经线和纬线的切线方向。 可选为“东北天”,“北东地”,“北西天”等右手直角坐标系。 本书中的地理坐标系取为“东北天(ENU)”地理坐标系, x轴指向东,y轴指向北, z轴垂直于当地水平面,沿当地垂线向上 。
§1.4.1 导航中常用的坐标系
Y
地平坐标系(t)
Z X
地平坐标系,也称为航迹坐标系,原点与载体所 在地点重合,一坐标轴沿当地的垂线方向,另外 两轴在水平面内。各坐标轴方向顺序,跟地理坐 标系相似,可以灵活选取,x、y、z三轴只需构 成右手直角坐标系即可。
20
§1.4.1 导航中常用的坐标系
地平坐标系(t) 载体运动引起地平坐标系相对于惯性坐标系的转动. 该转动角速度可分解为 1)地平坐标系相对于地球坐标系的转动角速度 2)地球坐标系相对于惯性坐标系的转动角速度。
o
λ
L
ye
g ωiey = ωie cos L g ωiez = ωie sin L
g iex
34
ω =0
xe