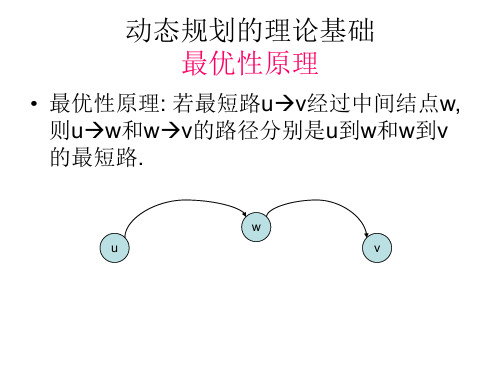
动态规划依据的最优性原理
动态规划的基本原理和基本概念
)
=
max/
min
n
d
j
(S
j
,
x
j
)
j=k
7)指标递推方程(动态规划的基本方程):
fk (Sk ) = max/ min{dk (Sk , xk ) + fk+1(Sk+1)}, k = 1,2,..., n
f
n+1
(Sn+1
)
=
0
例 投资金额分配问题.某公司有4百万元资金需要投资,有三个投资 项目可以选择。经市场调查预测,如果向项目 i 投资 j 百万元,则每年
所得到的利润(万元/年)因投资额的不同而有差异,如下表所示。问
应如何投资才能使总的利润最大?
投资额
利润
0
1
2
3
4
项目
项目1
0
16 25 30 32
项目2
0
12 17 21 22
项目3
0
10 14 16 17
解:令每给一个项目考虑投资多少资金为一个决策阶段,则该投资
决策问题可分为三个阶段.决策顺序为:
最优 决策
0 1 1
2 2,3
目标 值
0 12 22
27 31
项目1(阶段1):
状态 0 4 0+31
决策
1
2
3
16+27 25+22* 30+12
4 32+0
最优 决策
2
目标 值
47
S1
x1 S2
x2
S3
x3
47 4
31 4
动态规划算法原理与的应用

动态规划算法原理与的应用动态规划算法是一种用于求解最优化问题的常用算法。
它通过将原问题划分为子问题,并将每个子问题的解保存起来,以避免重复计算,从而降低了问题的时间复杂度。
动态规划算法的核心思想是自底向上地构建解,以达到求解整个问题的目的。
下面将介绍动态规划算法的原理以及一些常见的应用。
1.动态规划算法的原理1)将原问题划分为多个子问题。
2)确定状态转移方程,即找到子问题之间的关系,以便求解子问题。
3)解决子问题,并将每个子问题的解保存起来。
4)根据子问题的解,构建整个问题的解。
2.动态规划算法的应用2.1最长公共子序列1) 定义状态:假设dp[i][j]表示序列A的前i个字符和序列B的前j个字符的最长公共子序列的长度。
2) 确定状态转移方程:若A[i] == B[j],则dp[i][j] = dp[i-1][j-1] + 1;若A[i] != B[j],则dp[i][j] = max(dp[i-1][j],dp[i][j-1])。
3) 解决子问题:从前往后计算dp数组中每个元素的值。
4) 构建整个问题的解:dp[m][n]即为最终的最长公共子序列的长度,其中m和n分别为序列A和序列B的长度。
2.2背包问题背包问题是指给定一个背包的容量和一些物品的重量和价值,要求在不超过背包容量的情况下,选择若干物品放入背包中,使得背包中物品的总价值最大。
该问题可通过动态规划算法求解,具体步骤如下:1) 定义状态:假设dp[i][j]表示在前i个物品中选择若干物品放入容量为j的背包中,能够获得的最大价值。
2) 确定状态转移方程:考虑第i个物品,若将其放入背包,则dp[i][j] = dp[i-1][j-wi] + vi;若不将其放入背包,则dp[i][j] = dp[i-1][j]。
3) 解决子问题:从前往后计算dp数组中每个元素的值。
4) 构建整个问题的解:dp[n][C]即为最终的背包能够获得的最大价值,其中n为物品的个数,C为背包的容量。
动态规划的三种实现方式
朴素算法与递推算法的效率
程序结构
1,初始化: F[0]=0;f[i]=max 2,松驰操作: flag:=有紧边 while flag=有紧边 do begin flag:=无紧边; 枚举i; 再枚举i的所有入边w(j,i); if f[j]+w(j,i)<f[i] then begin f[i]:=f[j]+w(j,i); flag:=有紧边; end; end;
松驰操作要点
动态规划与最短路
– 动态规划=求初始状态0到所有节点的最短路长度
松驰操作:
– F[i]:从初始状态0到状态i的最优值 – 紧边:使从0到i更优的边.(使f[i]更优) – 设0到i有一根绳,我们可以通过减小F[i]的值,从而使 这根绳变松. – If f[j]+w(j,i)<f[i] then f[i]:=f[j]+w(j,i) – 用紧边w(j,i)对状态i进行松驰操作使f[i]更优 – 结论
时间复杂度:O(x*节点总数*入度) (x待定)
记忆化搜索
递推的效率很高 但有时阶段不容易找,或不容易递推 怎么办 记忆化搜索 Var f:array[0..n]of integer;//保存状态i的最优 值 F[i]先初始化为极小值(<0) function dfs(i)//求f[i] Var j:integer;//枚举变量j只能是局部变量 Begin if f[i]>0 then exit(f[i]); for 枚举i的所有入边j 如果从0->j->i的代价比f[i]更优,更新f[i] exit(f[i]); End;
递推程序结构
1,初始化: F[0]=0;f[i]=max 2,松驰操作: 按一定的顺序依次枚举i; 按一定的顺序依次枚举i; 再枚举i的所有入边w(j,i); if f[j]+w(j,i)<f[i] then begin f[i]:=f[j]+w(j,i); flag:=有紧边; end;
动态规划问题的基本要素和最优化原理ppt课件
选择变量既要能确切描述过程演变又要满足无后效性, 而且各阶段状态变量的取值能够确定。一般地,状态变量 的选择是从过程演变的特点中寻找。
3、确定决策变量及允许决策集合
通常选择所求解问题的关键变量作为决策变量,同时要 给出决策变量的取值范围,即确定允许决策集合。
精品课程《运筹学》
ppt精选版
4、确定状态转移方程
根据k 阶段状态变量和决策变量,写出k+1阶段状态变 量,状态转移方程应当具有递推关系。
5、确定阶段指标函数和最优指标函数,建立动 态规划基本方程
阶段指标函数是指第k 阶段的收益,最优指标函数是指 从第k 阶段状态出发到第n 阶段末所获得收益的最优值, 最后写出动态规划基本方程。
f1(s1)
最优目标函数值
V 1 * ,n V 1 * ,n (s 1 * ,u 1 * 子, 从策略k ,的到s 最终n * 优点,u 目最n * 标优)函策数略值
fs ov ps tu s
, , ,
k k
k ,n k k
uu , ,
k
n
n 1
精品课程《运筹学》
ppt精选版
§2.2 动态规划的基本思想
最优化原理:作为整个过程的最优策略具有这样 的性质:无论过去的状态和决策如何,相对于前面 的决策所形成的状态而言,余下的决策序列必然构 成最优子策略。”也就是说,一个最优策略的子策 略也是最优的。
精品课程《运筹学》
ppt精选版
§2.3 建立动态规划模型的步骤
1、划分阶段
划分阶段是运用动态规划求解多阶段决策问题的第一步, 在确定多阶段特性后,按时间或空间先后顺序,将过程划 分为若干相互联系的阶段。对于静态问题要人为地赋予 “时间”概念,以便划分阶段。
贝尔曼方程

贝尔曼方程基本原理 动态规划的理论基础是最优化原理和嵌入原理。
最优化原理 一个最优策略,具有如下性质:不论初始状态和初始决策(第一步决策)如何,以第一步决策所形成的阶段和状态作为初始条件来考虑时,余下的决策对余下的问题而言也必构成最优策略。
最优化原理体现了动态规划方法的基本思想。
嵌入原理 一个具有已知初始状态和固定步数的过程总可以看作是初始状态和步数均不确定的一族过程中的一个特殊情况。
这种把所研究的过程嵌入一个过程族的原理称为嵌入原理。
通过研究过程族的最优策略族的共同性质得出一般通解,此通解自然也适用于原来的特殊问题。
动态规划的基本方法就是根据嵌入原理把一个多步决策问题化为一系列较简单的一步决策问题,可显著降低数学处理上的难度。
贝尔曼方程 应用最优化原理和嵌入原理可推导出动态规划的基本方程,称为贝尔曼方程。
它具有下面的形式:式中N表示多段决策过程的总段数,F(xk,uk)为标量函数,表示由第k段到第k+1段的过程中基于状态xk和决策uk的性能损失,表示以xk+1为初始状态的后N-(k+1)段分过程的最优性能目标,xk+1=f(xk,uk)是基于第k段的状态 xk和决策uk而得到的第k+1段的状态向量,【·】表示选择决策uk使【·】取极小值。
这是一个逆向递推方程。
采用迭代法按k=N-1,N-2,…,1,0顺序求解贝尔曼方程,即可得到N段决策过程的最优策略{uk,k=0,1,2,…,N-1}和最优轨线{xk,k=0,1,2,…,N },而最优性能值为J壨(x0)。
对于图1中的例子,贝尔曼方程的形式如下:经迭代计算后,得………………………这就是所求的最短距离。
从S到G的最短路径是SA2B1C2G。
而A2B1C2G,B1C2G,C2G 则分别是从A2,B1,C2到G 的最短路径。
贝尔曼方程是关于未知函数(目标函数)的函数方程组。
应用最优化原理和嵌入原理建立函数方程组的方法称为函数方程法。
贝尔曼最优原理和里卡蒂方程的关系

贝尔曼最优原理和里卡蒂方程是动态规划理论中的两个重要概念,它们之间有着密切的关系。
本文将就贝尔曼最优原理和里卡蒂方程的概念、相关理论及它们之间的关系进行详细的阐述和探讨。
一、贝尔曼最优原理的概念及意义贝尔曼最优原理是用来描述最优控制问题的一个基本原理,它是由美国数学家贝尔曼(Richard Bellman)提出的。
贝尔曼最优原理的基本思想是,如果一个过程在每一步都采取最优决策,那么从初始状态出发到达最终状态的整个过程也是最优的。
贝尔曼最优原理在动态规划、最优控制、强化学习等领域都有着重要的应用,是这些领域中的基本原理之一。
二、里卡蒂方程的概念及应用里卡蒂方程是动态规划理论中的另一个重要概念,它是由意大利数学家里卡蒂(Jacques-Louis Lions)提出的。
里卡蒂方程是一种偏微分方程,通常用来描述最优控制问题中的最优解。
在动态规划和最优控制问题中,通过求解里卡蒂方程可以得到最优控制的解析表达式,从而实现对最优控制问题的求解。
三、贝尔曼最优原理与里卡蒂方程的关系在动态规划和最优控制理论中,贝尔曼最优原理与里卡蒂方程之间存在着密切的关系。
具体来说,贝尔曼最优原理可以转化为对应的里卡蒂方程,从而实现对最优控制问题的求解。
另通过求解里卡蒂方程可以得到最优控制问题的最优解析表达式,从而验证贝尔曼最优原理的有效性。
四、贝尔曼最优原理和里卡蒂方程的应用实例为了更加具体地说明贝尔曼最优原理和里卡蒂方程的关系,我们可以通过一个简单的最优控制问题来进行说明。
假设有一个控制系统,其状态方程和性能指标分别为$x_{t+1}=f(x_t,u_t), J=\sum_{t=0}^{N}g(x_t, u_t)$其中$x_t$为系统的状态,$u_t$为系统的控制输入,$f(x_t,u_t)$为系统的状态方程,$g(x_t,u_t)$为系统的性能指标。
根据贝尔曼最优原理,可以建立相应的值函数和值函数方程;通过求解里卡蒂方程,可以得到最优控制问题的最优解析表达式。
6 动态规划

成立,其中0 ≤ k ≤ N-1。 证明:采用反证法。以极大值为例,即考虑假设u*(k), u*(k+1),…, u*(N-1)不是初态为x(k)的N-1级最优决策,而另外存在一个最优决策 序列u’(k), u’(k+1),…, u’(N-1) (0 ≤ k ≤ N-1)。则必有 JN[x(0), u* (0), u* (1),…, u* (k-1), u* (k),…, u* (N-1)] <JN[x(0), u* (0), u* (1),…, u* (k-1), u’(k),…, u’(N-1)] 而这与 * JN [ x(0)] J N [ x(0), u* (0), u* (1),, u* ( N 1)] max J N [ x(0), u(0), u(1),, u( N 1)] 相矛盾,所以必然有最优性原理成立。#
另记: u0, N 1—— u(0), u(1),…, u(N-1),表示N阶段决策过程中的一个策略; u0,k 1 —— u(0), u(1),…, u(k-1),表示前k个阶段的子策略; uk , N 1 —— u(k), u(k +1),…, u(N-1),表示后N-k个阶段的子策略; J1,N[x(0), u0, N 1 ] —— JN[x(0)],为N个阶段总性能指标; J1,k[x(0), u0,k 1] —— 为前k个阶段的局部性能指标; Jk+1, N[x(k), uk , N 1] —— 为后N-k个阶段的局部性能指标, 则最优性原理又可如下表示 定理6-1:采用上述记法,即存在以下两个等式
再考察从倒数第二段(即图中第三段)开始。 从x1(2) →F,有两条路线: x1(2) →x1(3) →F, J=J[x1(2)]=1+J[x1(3)]=1+4=5 x1(2) →x2(3) →F, J=J[x1(2)]=1+J[x2(3)]=1+3=4 有最小代价J*[x1(2)]=4 从x2(2) →F,也有两条路线: x2(2) →x1(3) →F, J=J[x2(2)]=2+J[x1(3)]=2+4=6 x2(2) →x2(3) →F, J=J[x2(2)]=2+J[x2(3)]=2+3=5 有最小代价J*[x2(2)]=5 考虑从倒数第三段(即图中第二段)开始。 从x1(1) →F,也只考虑两条路线: x1(1) →x1(2) →F, J=J[x1(1)]=6+J* [x1(2)]=6+4=10 x1(1) →x2(2) →F, J=J[x1(1)]=6+J* [x2(2)]=6+5=11 有最小代价J*[x1(1)]=10 从x2(1) →F,考虑: x2(1) →x1(2) →F, J=J[x2(1)]=4+J* [x1(2)]=4+4=8 x2(1) →x2(2) →F, J=J[x2(1)]=7+J* [x2(2)]=7+5=12 有最小代价J*[x2(1)]=8
简述动态规划的最优性原理及应用

简述动态规划的最优性原理及应用1. 动态规划的最优性原理动态规划是一种求解最优化问题的方法,它通过将问题分解为更小的子问题,并通过保存中间结果来减少重复计算的次数。
1.1 最优子结构性质动态规划的最优性原理基于最优子结构性质。
最优子结构性质指的是一个问题的最优解包含其子问题的最优解。
当一个问题满足最优子结构性质时,我们可以用递归的方式将问题分解为更小的子问题,然后通过解决这些子问题来得到原问题的最优解。
1.2 重叠子问题性质动态规划的最优性原理还依赖于重叠子问题性质。
重叠子问题性质指的是在求解一个问题时,我们会多次遇到相同的子问题。
通过保存中间结果,我们可以避免对相同的子问题重复计算,从而提高算法的效率。
2. 动态规划的应用动态规划的最优性原理可以应用于解决各种不同的问题,包括最长公共子序列、背包问题、图的最短路径等。
2.1 最长公共子序列最长公共子序列问题是指在两个序列中找到一个最长的公共子序列,该子序列不需要在原序列中是连续的。
通过动态规划的最优性原理,我们可以将最长公共子序列问题分解为更小的子问题,然后通过求解这些子问题来得到原问题的最优解。
2.2 背包问题背包问题是指在给定的容量下,选择一些物品放入背包中,使得物品的总价值最大。
通过动态规划的最优性原理,我们可以将背包问题分解为更小的子问题,然后通过求解这些子问题来得到原问题的最优解。
2.3 图的最短路径图的最短路径问题是指在一个带有加权边的有向图中,找到从一个节点到另一个节点的最短路径。
通过动态规划的最优性原理,我们可以将图的最短路径问题分解为更小的子问题,然后通过求解这些子问题来得到原问题的最优解。
3. 动态规划的实现步骤使用动态规划求解问题的一般步骤如下:1.定义状态:明确问题所求解的状态是什么,一般用函数或数组表示。
2.确定状态转移方程:通过分析问题的最优子结构,构建状态转移方程,表示当前状态与前一个状态之间的关系。
3.初始化边界条件:根据问题的实际情况,初始化边界条件,来解决最小规模的子问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动态规划依据的最优性原理
动态规划是一种解决多阶段决策问题的方法,它依据的最优性原理是指一个最优策略的子策略也必然是最优的。
也就是说,如果一个问题的最优解可以通过子问题的最优解来构造,那么这个问题就具有最优子结构,可以使用动态规划来解决。
最优性原理是动态规划的核心思想之一,它是通过将原问题分解为若干个子问题,并且每个子问题的最优解都能构成原问题的最优解。
这种分解的方式可以大大减少问题的规模,从而提高问题的求解效率。
为了更好地理解最优性原理,我们可以通过一个具体的例子来说明。
假设有一个背包问题,背包的容量为C,有n个物品,每个物品的重量分别为w1, w2, ..., wn,价值分别为v1, v2, ..., vn。
我们的目标是在不超过背包容量的情况下,选择一些物品放入背包,使得背包中物品的总价值最大。
我们可以使用动态规划来解决这个问题。
首先定义一个二维数组dp,其中dp[i][j]表示在前i个物品中选择一些物品放入容量为j的背包中所能获得的最大价值。
然后我们可以根据最优性原理来推导dp数组的递推关系。
假设我们已经求解出了dp[i-1][j],即在前i-1个物品中选择一些物品放入容量为j的背包中所能获得的最大价值。
那么对于第i个物品,我们有两种选择:放入背包中或者不放入背包中。
如果我们选择放入第i个物品,那么背包的容量就变为了j-wi,此时背包中物品的总价值就变为了dp[i-1][j-wi]+vi。
如果我们选择不放入第i个物品,那么背包中物品的总价值就保持不变,即为dp[i-1][j]。
因此,我们可以得到dp[i][j]的递推关系:
dp[i][j] = max(dp[i-1][j-wi]+vi, dp[i-1][j])
根据这个递推关系,我们可以从dp[0][0]开始,逐步计算出dp[n][C],即在前n 个物品中选择一些物品放入容量为C的背包中所能获得的最大价值。
最后,我们就可以通过回溯的方式,找到具体选择了哪些物品放入背包中,从而得到问题的最优解。
通过这个例子,我们可以看到最优性原理在动态规划中的应用。
它将原问题分解为若干个子问题,并且每个子问题的最优解都能构成原问题的最优解。
通过这种分解的方式,我们可以大大减少问题的规模,从而提高问题的求解效率。
总结起来,动态规划依据的最优性原理是指一个最优策略的子策略也必然是最优的。
通过将原问题分解为若干个子问题,并且每个子问题的最优解都能构成原问题的最优解,我们可以使用动态规划来解决问题。
最优性原理是动态规划的核心思想之一,它可以大大提高问题的求解效率。