白噪声通过LTI 的仿真
白噪声的产生以及Matlab仿真
一、白噪声和有色噪声定义
1.白噪声(white noise)
系统辨识中所用到的数据通常都是含有噪声的。
从工程实际出发,这种噪声往往可以视为具有有理谱密度的平稳随机过程。
白噪声是一种最简单的随机过程,是有一系列不相关的随机变量组成的理想化随机过程。
其自相关函数为dirac函数。
2.有色噪声(colored noise)
理想的白噪声只是一种理论上的抽象,在物理上是很难实现的,现实中并不存在这样的噪声。
因而,工程实际中测量数据所包含的噪声往往是有色造势。
所谓有色噪声(或相关噪声)是指序列中没一时刻的噪声相关。
有色噪声可以看成是由白噪声序列驱动的线性环节的输出。
二、白噪声与有色噪声区别
(1)其实由定义可以看出,白噪声不同时刻是不相关的,自相关函数为脉冲函数;有色噪声则是相关的。
(2)实际测试可以通过测试功率谱来区别,白噪声的功率谱在各频率的值都比较平均,有色噪声则会有较为明显的峰值。
白噪声
功率谱。
随机信号处理整理题目

第一章1、某离散时间因果LTI系统,当输入时,输出。
(1)确定系统的函数H(Z)(2)求系统单位序列相应h(n)(3)计算系统的频率特性H(e jθ)(4)写出系统的差分方程解:(1)|Z|>21(2)|Z| >21(3)因为H(z)收敛域为,包含单位圆所以H(e jθ)存在(4)==>2、x(n)的z变换为X(z)=1(1-z-1)(1-2z-1), ROC:1<│z│<2 ,求逆z变换。
解:设X(z)=A1-z-1+B1-2z-1=X1(z)+X2(z)则由部分分式分解法,可得A=(1-z-1)X(z)│z=1=-1, B=(1-2z-1)│z=2=2由ROC的形式,可以判定x(n)是一个右边序列和一个左边序列之和。
x1(n)=Z-1{X1(z)}=A{u(n)},x2(n)=Z-1{X2(z)}=B{-2n u(n)}所以,x1(n)=-u(n); x2(n)=-2n+1u(-n-1);因此,x(n)=x1(n)+x2(n)=-u(n)-2n+1u(-n-1)3、简述六种常用离散时间信号;并计算下题:已知序列X(n)的z变换为:求逆z变换解:设则由部分分式分解法,可得4)()41(,3)()31(4131=-=-=-==-=-zz z X z B z X z A由ROC 的形式,可以判定想x (n )为一个右边序列和一个左边序列之和。
}{}{3:,)(3)()(1111>==-z ROC n u A z X Z n x n}}{{4:,)1(4)()(2212<---==-z ROC n u B z X Z n x因此,X (z )的逆z 变换为)1(4)(3)()()(1121----=+=++n u n u n x n x n x n n4、(1) 一线性时不变系统,其输入输出满足如下差分方程:求其频率响应()j H e ω。
(2) 有一系统,其频率响应为写出表征该系统的差分方程。
相关函数及其谱在数字信号处理系统中的应用

相关函数及其谱在数字信号处理系统中的应用郭焕银【摘要】简述了线性时不变系统输入、输出序列的自相关、互相关函数定义,导出了它们与系统函数之间的基本关系.较为详细地分析了相关函数及其谱在信号检测与辨识、估算未知系统的冲激响应(系统函数)以及对频率响应为H(ω)的未知系统的辨识方面的应用.一方面能够加深对这些基本概念的理解;另一方面理论联系实际,可以解决实际工作中遇到的问题,从而更好的掌握和运用这方面的知识.【期刊名称】《宿州学院学报》【年(卷),期】2005(020)005【总页数】4页(P76-79)【关键词】自相关;互相关;线性时不变系统;辨识【作者】郭焕银【作者单位】宿州学院,物理系,安徽,宿州,234000【正文语种】中文【中图分类】TN911.72众所周知,在数字信号处理系统中,经常需要对各种各样的信号进行处理,但信号在传送或接收的过程中,经常要受到各种各样干扰信号的污染,这时,要从污染的信号中检测出所需的信号,就需要用到两个信号之间的相关运算,以衡量两个信号之间的相似程度并提取一些在很大程度上和应用有关的信息。
例如在雷达和主动声纳系统中,设x(n)是发射信号的取样,y(n)是在A/D转换器的输出端接收到的信号,如果目标是空间某个被雷达或声纳搜索的物体,则接收信号y(n)由发射信号经目标反射并经加性噪声污染的延迟信号组成,这时系统可描述为:y(n)=αx(n-D)+w(n)其中α为衰减因子,表示信号x(n)来回反射中的损失,D是来回产生的延迟,这里设为取样间隔的整数倍,w(n)表示天线收到的加性噪声及接收机前置电子器件产生的噪声。
若系统搜索空间没有目标,则y(n)中只含有噪声。
雷达或声纳探测的目的是比较y(n)和x(n),判断目标是否存在,若存在通过求延迟D来确定目标的距离。
然而实际上由于x(n-D)受加性噪声的污染,已不可能从波形上判断目标存在与否,相关则提供了这种检测的方法。
又如在数字通信中,从一点传送到另一点的信息,通常以二进制形式发送,发0时用信号序列x0(n)(0≤n≤L-1)表示,发1时用序列x1(n)(0≤n≤L-1)表示,L表示序列中取样值的数目。
白噪声Simulink仿真研究

白噪声相关问题的Simulink仿真研究1.前言对于一个实际系统而言,其测量信号常会受到噪声的干扰,在理论分析时常常用白噪声作为干扰信号,虽然理想的白噪声物理上并不存在,但由于白噪声在数学处理上具有简单方便的特点,所以在实际应用中占有重要的地位。
实际上,当我们所研究的随机过程,在比所考虑的有用频带宽得多的范围内具有均匀的功率谱密度时,就可以把它当作白噪声来处理,而不会带来多大的误差。
在完成这次作业的过程中,我利用Simulink对白噪声的相关特性进行了探究,共对5个小问题进行仿真实验,以期加深对白噪声的理解。
基于当正弦信号通过线性系统时,其频率保持不变,而相位发生改变这样的事实,在实验中我采用的是一个单一频率的正弦信号,其它频率信号的响应可以类似地得到。
所用正弦信号的相关参数如下图所示:信号频率为1Hz,振幅为1。
叠加的白噪声信号参数为:均值为0,方差为1,服从高斯分布。
图1-1a原始信号的参数图1-1b白噪声信号的参数考虑到白噪声“均值为零,功率谱密度在整个频率轴上有非零常数”,由于原信号是频率为1Hz的正弦信号,所以首先考虑用低通滤波器进行滤波,系统的完整结构图如下:图1-2 Simulink系统模型在上图中,右上角示波器的四个输入分别为原正弦信号、叠加了高斯白噪声的正弦信号、高斯白噪声以及通过滤波器之后的信号。
2.实验过程2.1低通滤波低通滤波器的参数如下:8阶Butterworth低通滤波器,截止频率2Hz图2-1 低通滤波器参数补充:滤波器的阶数1阶Butterworth低通滤波器2阶Butterworth低通滤波器8阶Butterworth低通滤波器2.1.1频域分析结果图2-2a原正弦信号的功率谱密度函数图2-2b白噪声的功率谱密度函数图2-2c叠加后信号的功率谱密度函数图2-2d滤波后信号的功率谱密度函数2.1.2 时域分析从上到下,依次为:原正弦信号、叠加了高斯白噪声的正弦信号、高斯白噪声以及低通滤波之后的信号。
基于Simulink的汽车双轴悬架动态仿真分析
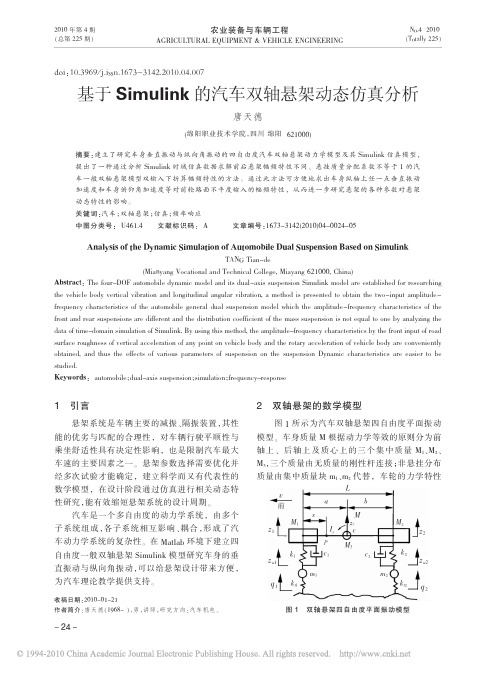
2010年第4期农业装备与车辆工程图1双轴悬架四自由度平面振动模型doi :10.3969/j.issn.1673-3142.2010.04.007基于Simulink 的汽车双轴悬架动态仿真分析唐天德(绵阳职业技术学院,四川绵阳621000)摘要:建立了研究车身垂直振动与纵向角振动的四自由度汽车双轴悬架动力学模型及其Simulink 仿真模型,提出了一种通过分析Simulink 时域仿真数据求解前后悬架幅频特性不同、悬挂质量分配系数不等于1的汽车一般双轴悬架模型双输入下折算幅频特性的方法。
通过此方法可方便地求出车身纵轴上任一点垂直振动加速度和车身俯仰角加速度等对前轮路面不平度输入的幅频特性,从而进一步研究悬架的各种参数对悬架动态特性的影响。
关键词:汽车;双轴悬架;仿真;频率响应中图分类号:U461.4文献标识码:A文章编号:1673-3142(2010)04-0024-05Analysis of the Dynamic Simulation of Automobile Dual Suspension Based on SimulinkT ANG Tian-de(Mia ny ang Vocational and Technical College,Mia y ang 621000,China)Abstrac t :The four-DOF automobile dynamic model and its dual-axis suspension Simulink model are established for researching the vehicle body vertical vibration and longitudinal angular vibration,a method is presented to obtain the two-input amplitude-frequency characteristics of the automobile general dual suspension model which the amplitude-frequency characteristics of the front and rear suspensions are different and the distribution coefficient of the mass suspension is not equal to one by analyzing the data of time-domain simulation of Simulink.By using this method,the amplitude-frequency characteristics by the front input of road surface roughness of vertical acceleration of any point on vehicle body and the rotary acceleration of vehicle body are conveniently obtained,and thus the effects of various parameters of suspension on the suspension Dynamic characteristics are easier to be studied.Keywords :automobile ;dual-axis suspension ;simulation ;frequency-response1引言悬架系统是车辆主要的减振、隔振装置,其性能的优劣与匹配的合理性,对车辆行驶平顺性与乘坐舒适性具有决定性影响,也是限制汽车最大车速的主要因素之一。
平稳白噪声通过LTI系统

随机信号与系统 2007年春 饶渐升
8
解:已知 R X ( ) ( N 0 2) ( )
所以
N0 RYX ( ) R X ( ) h( ) h( ) 2
于是
h(t ) (2 N 0 ) RYX (t )
Note: 通过互相关测量单元获得了相关函数 就可得到被测系统的冲击响应函数h(t)。实 际应用中,输入X(t)不一定为理想平稳白噪 声,只要在相对于被测系统h(t)较宽的频 带内基本为常数 ( N 0 2) ,则该方法仍是估 计系统冲击响应h(t)的一种有效方法。
2、自相关函数
RY ( ) RX ( ) h( ) h( ) N0 N 0 rh ( ) h( ) h( ) 2 2
2
N 2 0 3、功率谱密度 SY ( ) S X ( ) H ( ) = H ( ) 2
12/1/2018 2:08 PM 随机信号与系统 2007年春 饶渐升 3
SY () S X () | H ( j) |
2
2
1 1 1 j RC 1 j RC 2 2 2 2 RC 4 RC 2 1 2 1 ( RC ) 2 ( )
12/1/2018 2:08 PM
RY ( ) exp( ) 2 RC RC
RC
2
随机信号与系统 2007年春 饶渐升5Βιβλιοθήκη 例5.3续信号功率
P Y RY (0)
2
2 RC
(2)平稳高斯白噪声通过LTI系统之后还是零 均值的高斯随机信号,所以
fY ( y , t )
12/1/2018 2:08 PM
RC
e 2
随机信号处理笔记之白噪声
随机信号处理笔记之⽩噪声1 随机信号处理笔记:⽩噪声1 随机信号处理笔记:⽩噪声1.1 关于⽩噪声1.1.1 ⽩噪声的概念1.1.2 ⽩噪声的统计学定义1.1.3 ⽩噪声的⾃相关函数1.2 ⽩噪声通过LTI系统1.2.1 限带⽩噪声1.2.1.1 低通⽩噪声1.2.1.2 带通⽩噪声1.3 等效噪声带宽1.3.1 等效原则1.3.2 等效公式引⾔在⼏乎所有的电⼦通信中,都不可避免地会有噪声⼲扰正常的通信质量。
因此对噪声统计特性的研究就显得很重要。
在分析通信系统的抗噪声性能时,常⽤⾼斯⽩噪声作为通信信道的噪声模型。
常见的电⼦热噪声近似为⽩噪声。
本⽂就‘⽩噪声’统计特性及其通过线性时不变系统的输出特性做简要总结。
1.1 关于⽩噪声1.1.1 ⽩噪声的概念“⽩噪声”,Additive White Gaussian Noise(AWGN),符合⾼斯分布。
“⽩”的概念来⾃于光学,和⽩光的“⽩”是同⼀个意思,指的是包含所有频率分量的噪声,且这所有的频率分量是等值的。
1.1.2 ⽩噪声的统计学定义如果⽩噪声的功率谱密度在所有频率上都是⼀个常数:其中,;,。
则称该噪声为⽩噪声。
⽩噪声的单边功率谱密度:其中,;,。
1.1.3 ⽩噪声的⾃相关函数根据维纳-⾟钦定理,平稳随机过程的功率谱密度函数和⾃相关函数是傅⾥叶变换对。
⽩噪声的⾃相关函数:对于所有的,都有,说明⽩噪声仅在时刻才是相关的,⽽在其他时刻()的随机变量都是不相关的。
⽩噪声的平均功率:因此真正“⽩”的噪声是不存在的。
实际⼯程应⽤中,只要噪声的功率谱密度均匀分布的频率范围远⼤于通信系统的⼯作频带(3dB带宽),就可将其视作⽩噪声。
1.2 ⽩噪声通过LTI系统尽管⽩噪声是具有均匀功率谱的平稳随机过程,当它通过线性系统后,其输出端的噪声功率就不再均匀。
假设⽩噪声的功率谱密度,系统传函是,则LTI系统输出端的噪声功率谱密度函数为:由于LTI系统的传输函数,不是“⽩”的。
白噪声
4.3 理想白噪声、带限白噪声比较分析1、实验原理若一个具有零均值的平稳随机过程,其功率谱密度在某一个有限频率范围内均匀分布,而在此范围外为零,则称这个过程为带限白噪声。
带限白噪声分为低通型和带通型。
白噪声详细描述可参考马文平、李兵兵等编著.随机信号分析与应用.科学出版社,2006出版的书第2章节。
朱华、黄辉宁、李永庆、梅文博.随机信号分析.北京理工大学出版社,2000出版的书第4章节。
以及与随机信号分析相关的参考书籍。
2、实验任务与要求⑴通过实验掌握白噪声的特性以及带限白噪声的意义,重点在于系统测试与分析。
算法选用matlab或c/c++语言之一编写和仿真程序。
系统框图如图2-8所示:低通带通x(t)y1(t)y2(t)图2-8带通滤波器系统框图⑵输入信号x(t):x(t)分别为高斯白噪声信号和均匀白噪声信号,高斯白噪声如图2-9所示:图2-9 高斯白噪声的时域、频域图要求测试白噪声的均值、均方值、方差,自相关函数、概率密度、频谱及功率谱密度并绘图。
分析实验结果,搞清楚均值、均方值、方差,自相关函数、频谱及功率谱密度的物理意义。
例:均值除了表示信号的平均值,它还表示信号中有了什么成分。
相关函数当τ=0时为什么会有一个冲击,表示什么,它又等于什么。
信号的时域波形有哪些特征,频域又有哪些特征。
频谱及功率谱密度有什么差异,什么噪声是白噪声,这个噪声符合白噪声的定义吗等等。
⑶设计一个低通滤波器和一个带通滤波器。
要求白噪声分别通过低通滤波器和带通滤波器后的信号能够表现出带限白噪声的特点。
测试低通滤波器和一个带通滤波器的时频特性和频域特性以验证其正确性。
⑷分别计算高斯白噪声、均匀白噪声经低通滤波、带通滤波器后的均值、均方值、方差、概率密度、自相关函数、频谱及功率谱密度,并加以分析。
⑸所有结果均用图示法来表示。
⑹白噪声在什么情况下为带限白噪声?⑺按要求写实验报告。
(+)RF仿真总结
Introduction to RF Simulation and Its Application— Ken Kundert, 2006— 许建超译,西安交通大学,2008RF电路虽然比普通电路难测试,但是还是有统一的特性。
目前2种常用的测试方法:谐波平衡法(hamonic balance)和打靶法(shooting method)1The RF Interface1.1基带信道带宽决定了数据传输速率1.2transmitter有2个要求:功率效率要高,邻近信道干扰要小(要求线性度好)receiver有3个要求:有效恢复小信号,能有效抑制其它信道干扰,功耗要小1.3Small Desired Signals①LNA的是小信号,噪声用普通的spice noise可以分析得到;而Mixer,LO是大信号,噪声要用pnoise分析得到②超外差结构采用多个中频可以将增益分配到不同频率范围(RF,IF1,IF2,Baseband等),因此可以减小耦合干扰的机会。
③零中频结构,耦合非常严重,需要小心建模:比如说来自衬底的耦合,来自package pins的耦合,来自电源线的耦合等。
1.4Large Interfering Signals ⇒ receiver要线性①大干扰信号又叫阻塞信号,使接收机前端过载或者减敏(其实就是进入功率压缩区),同时抬高前端的噪声底限(noise floor)。
②为了克服以上问题,要求接收机前端线性度非常好→接收机为窄带电路,用互调失真IMD来描述线性度1.5Adjacent Channel Interference ⇒ PA要线性①PA的非线性导致spectral regrowth,从而导致邻近信道功率增加,这对于周围的收发机来说大信号干扰增大。
②对于digital modulated signals,频谱扩展效应很难用瞬态仿真得到,后面会讲到,用transient-envelop来仿真。
基于压缩感知的凸优化算法研究及应用
分类号:密级:UDC:编号:工学硕士学位论文基于压缩感知的凸优化算法研究及应用硕士研究生:郝东斌指导 教师:张春杰 副教授学科、专业:信息与通信工程论文主审人:邓志安 副教授哈尔滨工程大学2019年3月分类号:密级:UDC:编号:工学硕士学位论文基于压缩感知的凸优化算法研究及应用硕士研究生:郝东斌指导教师:张春杰 副教授学位级别:工学硕士学科、专业:信息与通信工程所在单位:信息与通信工程学院论文提交日期:2019年1月论文答辩日期:2019年3月学位授予单位:哈尔滨工程大学Classified Index:U.D.C:A Dissertation for the Degree of M.EngResearch and Application of Convex Optimization Algorithms Based on Compressed SensingCandidate:Hao DongbinSupervisor:Assoc. Prof. Zhang ChunjieAcademic Degree Applied for:Master of EngineeringSpecialty:Information and Communication EngineeringDate of Submission:Jan, 2019Date of Oral Examination:Mar, 2019University:Harbin Engineering University哈尔滨工程大学学位论文原创性声明本人郑重声明:本论文的所有工作,是在导师的指导下,由作者本人独立完成的。
有关观点、方法、数据和文献的引用已在文中指出,并与参考文献相对应。
除文中已注明引用的内容外,本论文不包含任何其他个人或集体已经公开发表的作品成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验2 白噪声通过LTI 的仿真1、实验目的了解白噪声通过LTI 系统的原理与处理方法,学会运用Matlab 函数对随机过程进行均值、相关函数和功率谱的估计,并且通过实验分析理论分析与实验结果之间的差异。
2、实验原理假定一具有单位方差的抽样序列{X(n)}的白噪声随机过程X(t)通过一脉冲响应为的线性滤波器,绘出输入输出信号的均值、方差、相关函数及功率谱密度。
设系统冲激响应为h (n ),传递函数()()jnwn H w h n e∞-=-∞=∑,或者用Z 变换,结果为()()nn H w h n e∞-=-∞=∑。
输入为 X (n ),输出为()()()()()*k Y n h n X n h n k X k ∞=-∞==-∑,均值关系:()()()*Y X m n h n m n =,若平稳有, ()()0Y X m n m H =自相关函数关系, ()()()()121212,**,Y X R n n h n h n R n n =,当是平稳时候,有()()()()**Y X R m h m h m R m =-题目中假设为白噪声,可以根据白噪声的性质进行理论计算。
白噪声的自相关函数,()()2v v r m t σδ=这里,假设的是零均值和单位方差,于是()()x r m t δ=,而()1x R z =()()()1y R z H z H z -=对应的功率谱, ()()()221||12cos jw y x P w P w H e a w a ==-+在这里,由于()()1jw x x P w R e ==,,a=0.95,可以算出输出信号的方差为,()()2102jwyy yr R e dw ππσπ-==⎰可以用留数法简单计算出来。
下面对输入输出信号的均值、方差、相关函数及功率谱密度分别进行讨论。
均值变化输入为白噪声,并且均值为 0,按照理论公式,可得到()00Y X m m H ==下面对实际值进行分析:输入的随机序列,服从标准正态分布。
可以用下面的语句产生x = randn(1,500); % 产生题设的随机序列,长度为500 点系统的冲激响应为()()()0.5nh n u n =,可以用下面的语句产生这个冲激信号:b=[1];a=[1,-0.5]; % 设置滤波器的参数,b 为分子系数,a 为分母系数 h=impz(b,a,20); % 得到这个系统的冲激响应,就是题设中的h (n )输入信号通过线性系统,可以通过卷积的方法,或者用 filter 函数,y1=filter(b,a,x); % 用滤波器的方法,点数为500 点 y2=conv(x,h); % 通过卷积方法得到,点数为519 点实现的MATLAB 代码如下:clear all;x = randn(1,500); % 产生题设的随机序列,长度为500点b=[1];a=[1,-0.5]; % 设置滤波器的参数,b 为分子系数,a 为分母系数 h=impz(b,a,20); % 得到这个系统的冲激响应,就是题设中的h (n ) y1=filter(b,a,x); % 用滤波器的方法,点数为500点 subplot(2,1,1); plot(y1,'r');Title('邹先雄——用滤波器的方法,点数为500 点'); x = randn(1,500);y2=conv(x,h); % 通过卷积方法得到,点数为519点 subplot(2,1,2); plot(y2,'b');title('邹先雄——通过卷积方法得到,点数为519 点'); grid on;下面画出两者得到波形的区别:(为了保持一致,对y2 的输出取前500 点)两者的输出波形近似一致,可以采用任意一个进行分析。
就采用y1 进行讨论,输出均值为:y1_mean=mean(y1); % 进行时间平均,求均值最终值为-0.0973,与理论的零值有一定误差,考虑到输入随机序列的均值不是0,m_x=mean(x)=-0.0485,按照上面式子,得到m_y=m_xH(0)=2m_x=-0.0970理论值和实际值是非常吻合的。
附运行结果图:*因为是随机序列,所以每次运行得到y1和m_x的值也是随机的,但是它们始终满足y1=2m_x方差变化输入信号方差的理论值就是1,按照公式,输出的功率谱为下面对实际值进行分析,用y1_var=var(y1); 求得输出均值为 1.3598,与理论值的1.3333 有差距。
如图:自相关函数的理论与实际值理论值为:在题设中,为白噪声,所以所以,输出的自相关函数理论值为可以得到,在零点的值就是 1.3333,也就是输出信号的平均功率。
由MATLAb计算的结果为1.3608,这和计算结果非常接近,实际的自相关函数曲线为:clear all;x = randn(1,500); % 产生题设的随机序列,长度为500点b=[1];a=[1,-0.5]; % 设置滤波器的参数,b为分子系数,a为分母系数h=impz(b,a,20); % 得到这个系统的冲激响应,就是题设中的h(n)y1=filter(b,a,x); % 用滤波器的方法,点数为500点y2=conv(x,h); % 通过卷积方法得到,点数为519点Y3=var(y1)title('自相关函数');Ry=xcorr(y1,20,'coeff'); % 进行归一化的自相关函数估计,相关长度为20n=-20:1:20;stem(n,Ry,'MarkerFaceColor','red');title('邹先雄——实际的自相关函数曲线');功率谱密度函数的理论与实际值对于理论的功率谱密度,可以表示为,而对于观测数据,可以用功率谱估计的方法得到功率谱密度。
首先,采用Welch 法估计信号的功率谱。
它的原理是将数据分成等长度的小段,并且允许数据的重叠,对每段进行估计,再进行平均,得到信号的功率谱。
在Matlab 中有专用函数pwelch,它的用法是:[Px,f]=pwelch(X,WINDOW,NOVERLAP,NFFT,Fs, 'onesided'); % window 是采用的数据窗,NOVERLAP 是重叠的数目,NFFT 是做FFT 的点数,Fs 是采样频率,onesided 是频率取值。
针对本例,可以用下面语句实现:window=hamming(20); % 采用hanmming窗,长度为20noverlap=10; % 重叠的点数Nfft=512; % 做FFT的点数Fs=1000; % 采样频率,为1000Hzx = randn(1,500); % 产生题设的随机序列,长度为500点b=[1];a=[1,-0.5]; % 设置滤波器的参数,b为分子系数,a为分母系数h=impz(b,a,20); % 得到这个系统的冲激响应,就是题设中的h(n)y1=filter(b,a,x);y1_mean=mean(y1); % 进行时间平均,求均值y1_var=var(y1); % 进行时间平均,求方差Ry=xcorr(y1,20,'coeff'); % 进行归一化的自相关函数估计,相关长度为20 [Py,f]=pwelch(y1,window,noverlap,Nfft,Fs, 'onesided'); % 估计功率谱密度f=[-fliplr(f) f(1:end)]; % 构造一个对称的频率,范围是[-Fs/2, Fs/2]Py=[-fliplr(Py) Py(1:end)]; % 对称的功率谱plot(f,10*log10(abs(Py)),'r');title('邹先雄——实际功率谱密度曲线');grid on;最后,得到的估计值为根据上述值,可以计算出理论的功率,由于可以用下面的语句实现:w=2*pi*f/Fs;; % 转化到数字域上面H=(1+0.25-2*0.5*cos(w)).^(-1);% 系统函数模平方Gy=H/max(H); % 归一化处理Gy=10*log10(Gy); % 化成dB形式plot(f,Gy,'b');title('邹先雄——理论功率谱密度曲线');grid on;画出的图形见下图:这是理论的功率谱密度。
为了方便显示,将两幅图画在一起,便于比较。
window=hamming(20); % 采用hanmming窗,长度为20noverlap=10; % 重叠的点数Nfft=512; % 做FFT的点数Fs=1000; % 采样频率,为1000Hzx = randn(1,500); % 产生题设的随机序列,长度为500点b=[1];a=[1,-0.5]; % 设置滤波器的参数,b为分子系数,a为分母系数h=impz(b,a,20); % 得到这个系统的冲激响应,就是题设中的h(n)y1=filter(b,a,x);y1_mean=mean(y1); % 进行时间平均,求均值y1_var=var(y1); % 进行时间平均,求方差Ry=xcorr(y1,20,'coeff'); % 进行归一化的自相关函数估计,相关长度为20 [Py,f]=pwelch(y1,window,noverlap,Nfft,Fs, 'onesided'); % 估计功率谱密度f=[-fliplr(f) f(1:end)]; % 构造一个对称的频率,范围是[-Fs/2, Fs/2]Py=[-fliplr(Py) Py(1:end)]; % 对称的功率谱Py=Py/max(Py); % 归一化处理w=2*pi*f/Fs;; % 转化到数字域上面H=(1+0.25-2*0.5*cos(w)).^(-1);% 系统函数模平方Gy=H/max(H); % 归一化处理Gy=10*log10(Gy); % 化成dB形式plot(f,10*log10(abs(Py)),'r',f,Gy,'b');title('邹先雄——实际功率谱和理论功率谱拟合');legend(' ','实际值','理论值');grid on;结果为:从结果上可以看出来,两者存在着比较大的差距,这是由于输入随机序列的功率谱并不是常数的缘故,也就是输入不是严格的白噪声,所以会出现波动。
当随着数据值的增加,拟合的程度会有所改善。