阵列信号处理全.ppt
合集下载
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
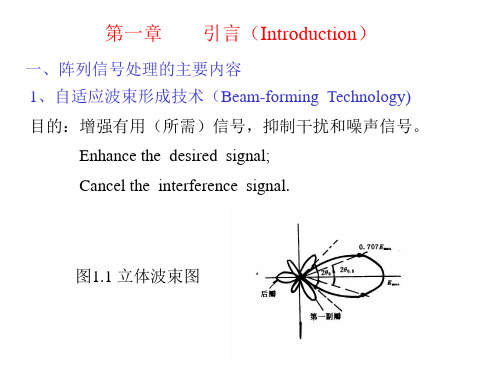
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
课件2:阵列信号处理数学基础

谱定理,也就是矩阵A的特征值分解定理,其中Λ diag( , , , ), E
1
2
n
[e ,e , ,e ]是由特征向量构成的酉矩阵。
1
2
n
•9
一、代数基础
Kronecker积
定义:p q矩阵A和m n矩阵B的Kronecker积记作A B,它是一个 pm qn矩阵,定义为
a B
11
x
(t)
s (t)e K
jwom ( i )
n
(t)
m
i1 i
m
s (t)为入射到阵列的第i个源信号 i
( )为第m个阵元相对参考点的时延
m
i
n (t)为第m个阵元的加性噪声 m
X (t) [x (t), x (t),, x (t)]T
1
2
M
矩阵表示接收信号 N (t) [n (t), n (t),, n (t)]T
f
f
Khatri Rao积具有如下一些性质:
A⊙(B⊙C) (A⊙B)⊙C
(A B)⊙C A⊙C B⊙C
A⊙B B⊙ A
•12
一、代数基础
Hadamard积
矩阵A 和B IJ IJ的Hadamard积定义为
向量化
a b 11 11
A B a b21 21
a bI1 I1
ab 12 12
1
2
t1 ,t2
E{n(t )nT (t )} 0
1
2
Outline
一、矩阵代数相关知识 二、信源和噪声模型 三、阵列天线统计模型 四、阵列响应矢量/矩阵 五、阵列协方差矩阵的特征值分解 六、信源数估计方法
•19
阵列信号处理 ARRAYppt课件

其中: SNRomni——接收机入口处的信噪比
CBlo(g 1SNR ) C——信道容量:bps B——接收机2 带宽:Hz
Omni
;.
25
波束成形天线示意图 天线阵的各个单元间距小于/2
发送波束成形
接收波束成形
;.
26
多天线系统的信道容量(2)
波束成形天线系统:将发射功率相等的分配到M个全向发射天线上,M个 全向收、发天线采用相位波束成形技术,则信道容量为:
;.
为什么要进行阵列信号处场的有用特征,获取信号源的属性等信息。 改善蜂窝和个人通信服务系统质量、覆盖范围和容量的强有力的工具。
研究兴趣:将接收天线阵列用于反向连接(客户到基站)
;.
;.
来看两个阵列在天线方面的应用
智能天线阵 分布多天线阵
智能天线阵 ;.
;.
29
多天线系统的信道容量比较
;.
30
传输环境对天线系统的影响
MIMO与波束成形天线的频谱效率 ([4,6],SNR=10dB,中断率 10% )
15
d
频谱效率 b/s/Hz
CBe a m sBlo2g(1M2SNORm)n i SN足 R 够B大 {2lo2g(M.SNORm}ni
;.
27
MIMO天线系统示意图
独立信道
天线阵
天线阵2
;.
28
多天线系统的信道容量(3)
如果发射功率分散到M个独立的信道中,并且各个信道具有相同的路径 损耗,则信道容量为:
CMIMOMlBo2g(1SNORm)ni S N足 R 够M 大{Blo2(gSNORm}n i
;.
平面波与阵列 天线应具有方向性——定向发射和接收 采用阵列天线——易于控制波束 阵列处理的对象——空间信号
现代数字信号处理课件:阵列信号处理
阵列信号处理
2. 阵列信号协方差矩阵分解 阵列信号协方差矩阵R=E[XXH]可以写作
R
E[ x1 x1 ] E[x2 x1]
E[ x1 x2 ] E[x2 x2]
E[ x1 xM E[x2 xM
] ]
E[
xM
x1
]
E[xM x2]
E[
xM
xM
]
(7.1.11)
这是一个Hermitian方阵,则其特征分解为
di l c
1 c
( xi
sin
cosj
yi
cos
cosj
zi
sinj )
(7.1.4)
通常情况下,考虑空间有N个独立远场窄带信号入射到
M个阵元的阵列上,且有零均值高斯白噪声n(t),可以得到
阵列的输出为
x1(t) exp( j2πf011)
x2 (t
)
exp(
j2πf0
21 )
UHRU=Σ
(7.1.13)
将R=ARSAH+σ2I代入上式,可得
UH(ARSAH+σ2I)U=Σ 而酉矩阵U满足UHU=I,因此
(7.1.14)
UHARSAHU=Σ-σ2I
(7.1.15)
由上面的分析可知,Σ可分为两部分: 一是与信号对应
的大特征值,由ARSAH和RN提供;二是与噪声对应的小特征 值σ2,由RN提供。即
则各阵元第k次快拍的采样值的矩阵形式为
X(k)=AS(k)+N(k)
(7.1.7)
由于S(k)随k变化,且其初相通常为均匀分布,一阶统
计量(均值)为零,所以不能直接采用一阶统计量来提取方向
信息。而二阶统计量可以消除信号S(k)的随机初相,可以用
5-智能天线与阵列信号处理.

一般信号带宽远小于载波频率: B
1 T 1 所以有: ri c B 1 T s ( t ri ) s (t ) 则有: c
所以各个阵元接收到的信号向量为:
s(t ) s1 (t ), s2 (t ),
记 a( ) e
, sN (t ) s(t ) e
1 T T si (t ) s (t ri ) exp[ j (t ri k ) c
其中
k :为波数向量;
k/ k :为电波传播方向的单位向量;
,其中 为信号的角频率, k / c 2 / 为波数(弧度/长度)
c 为光速, 为信号的波长; 1 T ri 为信号相对于基准点的延迟时间; c
采用定位发射,减少无 用能的损失
2408.7m
942.5m
可见 ,要到达相同目标,普通天线消耗的功率要 比智能天线多得多!
智能天线的优越性 ——
覆盖半径是2km 天线与手机之间交换频率为20次/s 手机用户在θ1处
精确定位
信号对天线产生相位差α1=kd*cosθ1 处理器计算出手机下一步可能的到达位置,方位角为θ2 获取电流的相位差α2=kd*cosθ1
T jrT1k
jrT 2k
,e
jrT1k
,
,e
jrT N k
T
jrT 2k
,e
,
,e
T
jrT N k
——方向矢量,只与波达的空间
T
角 有关,与基准点的位置无关,若以第一阵元为基准点,则有
a( ) 1, e
jrT 2k
,
,e
阵列信号处理全.ppt

▪平面阵
图1.5
▪立体阵
图1.6
b. 参数化数据模型
假设N元阵分布于二维平面上,阵 元位置为:
rl xl , yl ,l 1,2, , N
一平面波与阵面共面,传播方向矢
量为: 1 cos ,sin T
c
y
r
x 图1.7:二维阵列
几何结构
阵元
l 接收信号为:xl
t s rl,t
滤波:增强信噪比 获取信号特征:信号源数目 传输方向(定位)及波形 分辨多个信号源
定义:
➢传感器——能感应空间传播信号并且能以某 种形式传输的功能装置
➢传感器阵列(sensors array)——由一组传感 器分布于空间不同的位置构成
由于空间传播波携带信号是空间位置和时
间的四维函数,所以:
连续:面天线
波动方程的任意解可以分解为无穷多个“单频”
解的迭加(传播方向和频率分量均任意)。
波动方程的单频解可以写成单变量的函数:
sr,t Aexp[ j(t kT r) Aexp[ j t T r ]
式中 k ,其大小等于传播速度的倒数,其方向与 传播方向相同,常称为慢速矢量(slowness vector)。
2. G.Strang,"Linear Algerbra and Its Applications", Academic Press,New York ,1976.(有中译本, 侯自新译,南开大学出版社,1990)
§2.1线性空间和希尔伯特空间
一、符号及定义
1. 符号
以后我们常用字母加低杆表示矢量和矩阵,
实际阵列
空间采样方式 虚拟阵列(合成阵列如SAR)
空时采样示意图如下:
第8章 阵列信号处理与空域滤波

sK
n
vM
1
n
以后讨论没特殊说明均设各阵元的噪声为零均值, 方差为 2的高斯白噪声,不同阵元的接收噪声相互独立 且信号与噪声也相互独立 ,即
Ev n 0
Ev nvH l 2I n l EsnvH l 0
e j
s
t
xM 1 t
e
j
(
M
1)
定义列向量 xt x0 t x1 t
xM 1 t T
和 a 1 e j
e jM 1 T ,
2 d sin
(8.1.8)可表示为 x t a s t a s t e j0t
12
阵元 pmn 对参考点(坐标原点)时延
mn
pmn , r c
mdx sin cos ndy sin sin
c
(8.1.26)
信号相移为
mn
,
2
mdx sin cos ndy sin sin
mx ny
m 0,1, , M 1, n 0,1, , N 1
(8.1.7)
定义空间相位 2 f0d sin c 2 d sin
( f0 是入射信号载波频率,l 是波长,c f0 )
4
取 m = 0,1,L ,M - 1 , (8.1.7)写为向量形式
x0 t 1
x1 t
(8.1.8)
(8.1.9) (8.1.10)
向量 a 称为方向向量或导向向量(steering vector)
第四章 阵列信号处理

si (t ) = s (t − 1 riT α ) exp[ j (ωt − riT k )] c
通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单位为弧度/米,其方向为波的传播方向。
对比: 2 时间频率
T
k 2 空间频率
➢某一时刻(t固定)的恒等相位面,即kT r=常数的平 面,该平面与 k 垂直。
b) 任意解:由四维Fourier变换表示:
s
r,
t
1
2
4
s u, e j tkT rd kd
其中
s k, s t,r e j tkT rd rdt
传播波信号为空时信号,是时间和空间的四维 函数,服从物理规律——波动方程
Maxwell波动方程:2 E 1 2 E
c t 2
其中
: 2
2 x 2
2 y 2
2 z 2
A. 直角坐标系中的解:
a) 一个特解:s(x, y, z,t) Aexp[ j(t kxx ky y kzz)]
s(r,t) Aexp[ j(t kT r)]
第一章:绪论 第二章:数学基础 第三章:空域滤波原理及算法 第四章:部分自适应处理技术 第五章:阵列信号的高分辨处理 第六章:相干信源的高分辨处理 第七章:最大似然与加权子空间拟合方法估计信
号源方向 第八章:基于高阶统计量和循环非平稳阵列信号
处理简介
第一章 绪论
§1.1引言
一、阵列信号处理简介 1、信号与信息处理的三大支柱:
波动方程的任意解可以分解为无穷多个“单频”
解的迭加(传播方向和频率分量均任意)。
波动方程的单频解可以写成单变量的函数:
sr,t Aexp[ j(t kT r) Aexp[ j t T r ]
式中 k ,其大小等于传播速度的倒数,其方向与 传播方向相同,常称为慢速矢量(slowness vector)。
三、阵列信号处理的发展史
雷达
1936年
空域信号处理 只波
多维信号处理
自60年代以来,经历了三大阶段:
➢ 自适应波束控制 IEEE Trans AP 1964.3
➢ 自适应零点控制 IEEE Trans AP 1976.9
➢ 空间谱估计
IEEE Trans AP 1986.3
1 所以 T r表示从原点 o 传播到位置 r所需时间。
c
c) 波动方程另一个较复杂的解: 波形具有基本频率的调和级数形式:
sr,t s t T r sn exp[ jn0 t T r ] n
2 . Hudson J. Adaptive Array Principles Peter Peregrinus London,1981. (有中译本)
3.Haykin S.(deitor)Aduances in Spectrum analysis and array Processing.Vol І П. Prentice Hall.NJ.1991
空间采集
传播波
离散:传感器阵列
的接收 时间采集:所有传感器同步采样
又称为快拍(snapshot)
传播波的类型与媒质有关,采用的传感器 也随之不同:
传输波
电磁波
声波
地震冲击波
媒质 大气(自由空间) 大气、水中 大气、大地
传感器 天线(antenna) 换能器
检波器
(transducer) (geophone)
信息获取、处理和传输 2、阵列信号处理的研究内容:
检测、估计、滤波、成象等。
参 数 估 计 : 以 波 达 方 向 (DOA) 估 计 为 代
基表本内容
空间滤波:波束形成。
3、 阵列信号处理的研究对象: 空间传播波携带信号(空域滤波)
4、 阵列信号处理方法: 统计与自适应信号处理技术
(如谱估计、 最优与自适应、滤波) 5、 阵列信号处理的目的:
滤波:增强信噪比 获取信号特征:信号源数目 传输方向(定位)及波形 分辨多个信号源
定义:
➢传感器——能感应空间传播信号并且能以某 种形式传输的功能装置
➢传感器阵列(sensors array)——由一组传感 器分布于空间不同的位置构成
由于空间传播波携带信号是空间位置和时
间的四维函数,所以:
连续:面天线
实际阵列
空间采样方式 虚拟阵列(合成阵列如SAR)
空时采样示意图如下:
12
N N元传感器阵列
M次同步采样
空时处理
获取信息:波的到达方(DOA)、波形参数、 极化参数估计、空间滤波与检测等 图1.1:空时采样
二、阵列信号的应用
雷达:相控阵天线系统、波束灵活控制、高 分辨测向、干扰置零、成像(SAR/ISAR) 移动通信:波束形成、抗多址干扰、空分多 址(SDMA) 声纳:水声工程、宽带阵列处理 地震勘探:爆破、地震检测、地质层机构特 征分析、探石油 射电天文:定位、测向 电子医疗工程:层析成像、医学成像
(*)
代入波动方程:k x2 s(r , t )
k
2 y
s(r
,
t
)
k
2 z
s(r
,
t
)
2
c2
s(r,t)
若约束条件:
k
2 x
k
2 y
k
2 z
2
c2
即
则:(*)式表示的信号是波动方程的解,称为“单 色”或“单频”解。
c
为传播速度,2
T
(周期)
T c 2 2 k 2
k k
k 称为波数矢量,其大小表示单位波长的周期数,
wiener滤波理论应用于阵列处理(60年代)
滤波
两个方向 方向估计
自适应波束控制(指向) 近代谱估计(80年代以前)
自适应零点控制(70年代) 参数化模型(基于子空
间技术)
性能代价,快速算法
(80年代以后)
稳健算法,盲信号处理 (90年代)
稳健计算(90年代)
§1.2 波的传播与阵列信号处理
1、传播波信号
4.孙超,加权子空间拟合算法理论与应用,西北工业大学出 版社
5.刘德数等,空间谱估计及其应用,中国科技大学出版社 6.张贤达、保铮,通信信号处理,国防工业出版社,2000
期刊:
IEEE Trans.(SP,ASSP,AP,AES) IEE Pt(F,H)
荷兰 signal Processing
课程安排:
《阵列信号处理》
课程目的:
掌握空间传播波携带信号的获取与 处理的基本理论和方法,特别是空时多 维信号算法,熟悉参数估计和自适应波 束形成的常用算法。
课程要求:
期间:含上机实践。 期末:论文、考试。
参考文献:
书:
1.Monzingo.R.and Miller T. Introduction to adaptive array. Wiley Interscience. New York, 1980. (有中译本)