车载移动测量系统的构成与应用
汽车诊断与车载诊断系统(OBD)简介
汽车诊断与车载诊断系统(OBD)简介1 概述汽车诊断(Vehicle Diagnosis)是指对汽车在不解体(或仅卸下个别零件)的条件下,确定汽车的技术状况,查明故障部位及原因的检查。
随着现代电子技术、计算机和通信技术的发展,汽车诊断技术已经由早期依赖于有经验的维修人员的“望闻问切”,发展成为依靠各种先进的仪器设备,对汽车进行快速、安全、准确的不解体检测。
为了满足美国环保局(EPA)的排放标准,20世纪70年代和80年代初,汽车制造商开始采用电子控制燃油输送和点火系统,并发现配备空燃比控制系统的车辆如果排放污染超过管制值时,其氧传感器通常也有异常,由此逐渐衍生出设计一套可监控各排放控制元件的系统,以在早期发现可能超出污染标准的问题车辆。
这就是车载诊断系统(On-Board Diagnostics,缩写为OBD)。
OBD系统随时监控发动机工况以及尾气排放情况,当尾气超标或发动机出现异常后,车内仪表盘上的故障灯(MIL)或检查发动机灯(Check Engine)亮,同时动力总成控制模块(PCM)将故障信息存入存储器,通过一定的程序可以将故障码从PCM中读出。
根据故障码,维修人员能迅速准确地确定故障的性质和部位。
OBD-II是20世纪90年代推出的新的ODB标准,几乎提供了完整的发动机控制,并监控底盘、车身和辅助设备,以及汽车的诊断控制网络。
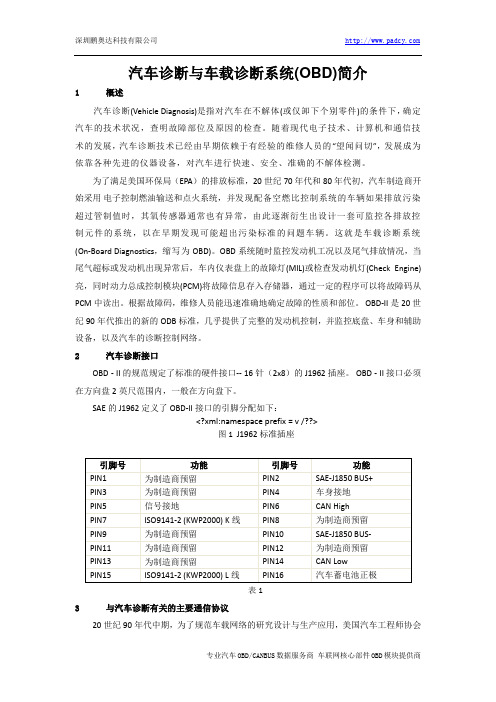
2 汽车诊断接口OBD - II的规范规定了标准的硬件接口-- 16针(2x8)的J1962插座。
OBD - II接口必须在方向盘2英尺范围内,一般在方向盘下。
SAE的 J1962定义了OBD-II接口的引脚分配如下:<?xml:namespace prefix = v /??>图1 J1962标准插座表13 与汽车诊断有关的主要通信协议20世纪90年代中期,为了规范车载网络的研究设计与生产应用,美国汽车工程师协会(SAE)下属的汽车网络委员会按照数据传输速率划分把车载网络分为Class A、Class B、Class C表2 车载网络分类目前OBD使用的通信协议主要有5种:ISO9141、KWP2000、SAEJ1850(PWM)、SAEJ1850(VPW)、CAN。
RTK使用原理及应用

俄罗斯的GLONASS
GLONASS
。
格洛纳斯(GLONASS),是俄语“全球卫星导航系统GLOBAL NAVIGATION SATELLITE SYSTEM”的缩写,该 系统最早开发于苏联时期,后由俄罗斯继续该计划。俄罗斯 1993年开始独自建立本国的全球卫星导航系统。该 系统于2007年开始运营,当时只开放俄罗斯境内卫星定位及导航服务。到2009年,其服务范围已经拓展到全球。 该系统主要服务内容包括确定陆地、海上及空中目标的坐标及运动速度信息等。 格洛纳斯”系统标准配置为24颗卫星,而18颗卫星就能保证该系统为俄罗斯境内用户提供全部服务。该系统卫星 分为“格洛纳斯”和“格洛纳斯-M”两种类型,后者使用寿命更长,可达7年。研制中的“格洛纳斯-K”卫星 的在轨工作时间可长达10年至12年。目前有24颗卫星正常工作、3颗维修中、3颗备用、1颗测试中。
23
网络RTK技术
。 24
网络RTK技术的优点
1.无需架设基准站,省去了野外工作中的值守人员和架设基准站的时间,降低了作业 成本,提高了生产效率;
2.传统“1+1”GNSS接收机真正等于2,生产效率双倍提高 ;
。
3.不需要在四处搬站,加密控制点;
4.扩大了作业半径,不受基站距离限制,网络覆盖范围内能够得到均等的精度;
2、网络传输差分数据(GPRS\GSM\CDMA) 新的差分数据传输模式:差分数据通过手机网络传到移动站 优点:距离不受受地形限制,作用距离远。
(手机网络信号,不受距离限制,因为主板解算原因,解算距离可达30KM ) 缺点:信号受手机网络信号质量影响,手机网络信号不好的地方无法使用
。 20
03
网络RTK技术
5.在网络覆盖区域内,能够实现测绘系统和定位精度的统一,便于测量成果的系统转 换和多用途处理。
车载式选频测量(30_MHz~6_GHz)在城市电磁环境水平监测的应用

㊀第43卷㊀第4期2023年㊀7月㊀辐㊀射㊀防㊀护Radiation ProtectionVol.43㊀No.4㊀㊀July 2023㊃辐射防护监测㊃车载式选频测量(30MHz ~6GHz )在城市电磁环境水平监测的应用唐㊀辉,高㊀鹏,粟琨璞,唐研博,徐㊀彬,谷㊀洪,李元东,缪尔康(四川省辐射环境管理监测中心站,成都611139)㊀摘㊀要:为更高效率㊁更准确的测量城市电磁环境水平,掌握电磁环境构成,使用与成都点阵科技公司联合研制的DZER100车载式快速选频测量系统对成都市温江区涌泉街道部分城市区域电磁环境水平进行测量㊂该系统在30MHz ~6GHz 频段㊁100kHz 分辨率条件下,全频带扫描时间为300ms ,实现了行车速度60km /h 下测点间距5m ,可有效获取每个测量点位的场强总量㊁频谱及特定频段的电磁环境水平㊂5.3km 2区域测量得到有效点位数据14393个,通过系统数据自动分析得到全区域电场强度平均值约1.23V /m ,0~2V /m 量级的占比达到了87.411%;占标率平均值为1.41%,占标率超过20%的点位仅为0.24%;通过频谱可视化分析功能,可快速掌握关注点位的频谱构成及关注频段的贡献量㊂车载式选频测量(30MHz ~6GHz )可实现各点位场强总量和频谱的同时测量㊂关键词:车载式;选频测量;城市电磁环境水平;监测中图分类号:X837文献标识码:A㊀㊀收稿日期:2022-08-30作者简介:唐辉(1989 ),男,2013年毕业于成都理工大学核工程与核技术专业,2016年毕业于成都理工大学辐射防护及环境保护专业,获硕士学位,工程师㊂E -mail:tanghuijinhefuzhao@通信作者:缪尔康㊂E -mail:14917494@㊀㊀城市电磁环境又被称为一般电磁环境[1-2],是指在较大的城市范围内由各种电磁辐射源,通过传播途径造成的电磁辐射的背景值,具有电磁辐射频谱非常宽㊁属于电磁辐射远区场两大特点㊂国内外均有对城市区域开展电磁环境测量的测量规范,主要有网格布点[2-3]和车载巡测[3-4]两种方式㊂网格布点方式通过将城市区域划分为等大的网格空间,并按一定的布点规则测量每个网格的电磁场数据,由于所有点位的测量均依靠人工,通常每个网格只测一个点位[2],获取的数据量较少[5-10]㊂车载巡测方式通过整合监测仪器㊁卫星定位设备及数据采集设备[11],利用自动监测技术对车辆行驶道路进行连续测量并记录数据[12-13],相比网格测量方法,车载巡测方法在数据获取量㊁数据代表性以及监测效率上优于网格测量法[14-15]㊂目前车载巡测方法所使用的仪器主要为非选频监测仪器(综合场监测仪器)和选频监测仪器两大类㊂使用非选频监测仪器测量时,不区分被测点位电磁波的频率,只关心电磁波的大小,只要被测点位的电磁波频率在接收探头频率响应范围内,即可测得电磁场时域幅度大小,其缺点在于对一些测值较高的点位或要了解关注点位电磁辐射源项构成,则需要使用选频仪器进行复测[13-14],多次反复测量降低了数据的时效性也让监测效率受限㊂使用选频监测仪器时,可以将时域状态下的电磁波解析为频域上的多个电磁波分量,将频率和幅值同时测出,可以解决非选频监测仪器巡测不区分电磁场频率的问题,进一步提升城市电磁环境监测和评估效率[15-16]㊂本文使用与成都点阵科技公司联合研制的DZER100车载式快速选频测量系统对成都市温江区涌泉街道部分城市区域的电磁环境进行了测量和分析㊂1㊀监测系统与方法1.1㊀监测系统构成和主要设备㊀㊀选频式电磁辐射监测仪器是实现选频路测的㊀辐射防护第43卷㊀第4期关键,使用的路测系统主要由选频式电磁辐射监测仪器㊁卫星定位设备和数据采集设备构成,数据的采集㊁记录㊁处理和分析全部实现自动化,系统构成如图1所示㊂针对现有选频设备全频段扫描时间长㊁车辆巡测时速过低等制约性问题,新型选频测量设备DZER100在硬件性能上有较大的提升,可实现100kHz 分辨率条件下,30MHz ~6GHz频段,每300ms 一次的全频带扫描,1s 内可获取3个全频带测量数据;若按5m 一个点位间距获取数据,最快的行车速度可达60km /h㊂图1㊀系统构成示例Fig.1㊀Example of system composition该设备配置了30MHz ~6GHz 全向探头,测量带宽更宽,覆盖了常用电磁辐射源的频率㊂其各向同性误差小于2.5dB,满足现行国内标准对选频仪器性能参数的要求[16],可以较好地接收来自空间各个方向的电磁波;该仪器还使用了动态智能底噪滤除算法,系统在测量过程中可以根据行驶路径沿线电磁环境水平,实时调整量程并扣除底噪,实现各点位场强和频谱的准确记录,有效解决了非选频监测仪器测量后只能掌握各点位场强大小却无法及时追溯其贡献源的问题㊂在数据分析方面,配合DZE10数据分析系统,可以将大量数据进行可视化处理,监测人员可以快速掌握测试区域的电磁环境总体水平并实现电磁环境贡献来源分析,工作效率大幅提升㊂为便于拆卸安装且不破坏车体原有结构,系统采用了磁吸的方式将探头架设在车顶,探头与车顶的距离约0.6m,如图2所示㊂图2㊀选频仪器探头车顶安装示例Fig.2㊀Example of probe mounting on the roof of thefrequency selective instrument vehicle1.2㊀巡测区域和布点㊀㊀对成都市温江区涌泉街道一处约5.3km 2的城市区域开展了车载式选频测量,该区域以居住区为主㊂巡测路径尽量覆盖被测区域内的所有道路,测量时间为10时到14时,天气晴朗,通过严格控制车速不超过60km /h,以保证测量点位间距不大于5m,如图3所示㊂图3㊀测试区域示意图Fig.3㊀Analysis of test area1.3㊀测量参数㊀㊀区域电磁环境监测是对整个宏观大范围环境的监测而非针对电磁辐射设施监测,电磁环境是各种频率电磁波的总和,是电磁波脱离电磁辐射源向外传播并叠加的结果㊂宏观上看,其特点是频带宽,属于电磁波的远场区㊂路测是通过密集点位测试,从微观角度来采集整个区域的更多点位,必然会经过电磁设施临近位置,但所有测点都是整个区域局部电磁环境水平反映,所有点位均唐㊀辉等:车载式选频测量(30MHz~6GHz)在城市电磁环境水平监测的应用㊀属于大范围电磁环境的远场㊂根据电磁波理论,远场区中的电磁波趋近于平面波,电场与磁场相互垂直,且比值恒定,即E/H=120πʈ377,同时,波功率密度矢量(坡印廷矢量)S=EˑH[17],带入电场与磁场的比值关系式可得S=E2/377或S=H2ˑ377㊂可以看出,在电磁辐射的远区场,只需要测量其中一个指标即可得到另外两个指标㊂从仪器探头原理上看,仪器使用了三维正交偶极子电场探头,因此测量参数确定为电场强度㊂1.4㊀监测读数㊀㊀各点位读取选频式电磁辐射监测仪器的实时值,包括电场强度㊁对应的占标率以及点位的坐标数据㊂电场强度是全频段的场强积分值,按式(1)[1]计算:电场强度=ðn j=1E2j(1)㊀㊀方比率之和,按式(2)[18]计算,计算结果取百分数:占标率=ð300GHz j=100kHz E2j E2L,j(2)式中,E j表示第j个频率测得的电场强度,V/m;E L,j表示第j个频率对应的限值,V/m,均由选频式电磁辐射监测仪器自动计算并由数据采集设备自动记录[18]㊂测量过程中为避免监测数据受人为影响,监测人员避免使用移动电话等无线发射设备㊂1.5㊀仪器校准与比对㊀㊀监测时使用的DZER100车载式快速选频测量系统的主机和探头经中国测试技术研究院检定,检定结果符合监测要求㊂测量过程中采用人工定点监测方式对车载巡测实时结果开展了验证工作,以巡测方式获取的一个点位的实时数据,其电场强度值为2.931V/m,人工定点测量电场强度值为2.998V/m,两次测量结果一致性较好,说明通过车载式选频测量(30MHz~6GHz)测量城市电磁环境水平是可行的㊂2㊀结果与讨论2.1㊀区域电磁环境总体水平与评估㊀㊀本次测量得到有效点位数据14393个,电场强度平均值约 1.23V/m,占标率平均值约1.41%㊂2.1.1㊀电场强度分析㊀㊀图4给出了场强数据累积分布曲线,按照1V/m量级区间对测量数据进行统计,其中0~ 1V/m和1~2V/m两个量级的占比最高,分别达到了43.81%和43.6%,总共占比达到了87.41%;从图4看出,3V/m测值以上的点位已经很少㊂将场强大小按照1V/m为跨度对每个点位进行着色得到电场强度地图㊂可以看出在十字路口㊁交叉路口附近有一定数量的场强高值存在,如图5所示㊂出现这种情况的主要原因是在十字路口㊁交叉路口是布放基站的优选位置,这些位置基站出现的频率较一般情况高得多,故容易出现场强较大值㊂图4㊀场强累计分布图Fig.4㊀Distributiondiagram of field intensity cumulation图5㊀测量点位按场强大小的空间分布Fig.5㊀Spatial distribution of measuringpoints according to field intensity2.1.2㊀占标率分析㊀㊀参照现行标准‘辐射环境保护管理导则电磁㊀辐射防护第43卷㊀第4期辐射环境影响评价方法与标准“(HJ /T 10.3 1996)[19]对单个项目影响的限制规则,将占标率按大小划分得到0%~20%㊁20%~50%㊁50%~100%及100%以上4个区间,根据测量数据绘制占标率地图,如图6所示㊂图6更为直观地显示各点位多种频率电磁场所致曝露的水平,电磁环境水平偏高点位的分布更容易被观察到㊂从所有点位的占标率分布情况看,其中99.76%点位的占标率小于20%,超过20%的仅为0.24%,电磁环境总体占标率是远低于100%㊂图6㊀测量点位按占标率大小的空间分布Fig.6㊀Spatial distribution of measuring pointpositions according to scale occupancy ratio2.2㊀电磁环境构成分析2.2.1㊀关注点位电磁频谱分析㊀㊀以图5中测值较大的橙色点位为例,以往的工作方式需要再次使用选频设备到现场测量来了解该点主要电磁辐射贡献来源,而车载式选频系统记录了每个点位的频谱信息,可查阅任意感兴趣点位的频谱构成,如图7所示㊂图7㊀点位的频谱图Fig.7㊀Spectrum diagram of the points利用数据可视化分析[20],将频谱图转换为柱状图显示电磁辐射贡献来源,如图8所示,可以看出该点的主要贡献来源是中国移动㊂同时,通过峰值频率自动解析,还可以从最大值列表中掌握更明细的频率贡献来源,如图9所示,中国移动5G 和4G 信号在该点位的贡献明显㊂图8㊀点位的主要贡献源Fig.8㊀Main contribuion sources of thepoints图9㊀点位的最大值频率列表Fig.9㊀List of maximum frequency of the point2.2.2㊀关注频段的贡献分析㊀㊀公众日常生活中常见的电磁辐射设施(设备)主要有移动通信基站㊁广播电视㊁调频广播㊁对讲机㊁Wifi㊁数字集群通信等,这些设施(设备)的工作频率在30MHz ~6GHz 频率范围内,其产生的电磁场构成了人们日常接触的电磁环境,其贡献量是我们关注的重点㊂通过选频路测,可以将测量区域内这些频段的贡献水平一次性获取并加以统计,数据获取量远超人工测量的数量[21],数据统计更具代表性,如图10所示㊂可以看出,该区域内中国移动和中国电信的基站频段对电磁环境的贡献比较明显,而中国联通等其他频段的贡献值绝大多数在1V /m 以内㊂唐㊀辉等:车载式选频测量(30MHz ~6GHz)在城市电磁环境水平监测的应用㊀作为比较,将中国移动和中国联通的点位数据单独标记在地图上,如图11和图12所示,可以看到两个运营商对该区域的电磁环境贡献的空间分布和差异㊂图10㊀常见频段的贡献比较Fig.10㊀Contribution comparison of common frequencybands图11㊀中国移动场强大小的空间分布Fig.11㊀Spatial distribution of fieldstrength of ChinaMobile图12㊀中国联通场强大小的空间分布Fig.12㊀Spatial distribution of fieldstrength of China Unicom3㊀结论通过车载式选频测量(30MHz ~6GHz)显示该区域电磁辐射环境总体处于较低的水平,远低于限值标准㊂车载式选频测量(30MHz ~6GHz)可实现各测量点位场强总量和频谱的同时测量,有效解决了使用非选频式监测仪器巡测时不区分电磁场频率的问题,是一种更高效的区域环境电㊀㊀㊀㊀㊀磁辐射监测方法㊂使用车载式选频测量(30MHz ~6GHz),获取的数据量远多于传统网格测量方法,数据代表性更强,可更全面地反应区域内的电磁环境情况,满足区域电磁环境总水平的测量与评估,电磁环境源项构成分析等多种需求,为电磁环境管理提供更详细㊁更精准的基础数据㊂参考文献:[1]㊀邹澎.环境电磁场测量[M].北京:中国计量出版社,1992:12-17.[2]㊀国家环境保护局.辐射环境保护管理导则电磁辐射监测仪器与方法:HJ /T 10.2 1996[S].北京:中国环境科学出版社,1996.[3]㊀International Telecommunication Union.Generation of radiofrequency electromagnetic field level maps (Study Group 5):㊀辐射防护第43卷㊀第4期ITU-T K.113NOTE 2015[S].Geneva:The ITU s Press,2015.[4]㊀International Telecommunication Union.Guidance for assessment,evaluation and monitoring of human exposure to radiofrequency electromagnetic fields (Study Group 5):ITU-T K.91NOTE 2020[S].Geneva:The ITU s Press,2020.[5]㊀陆利通,刘芳君,邹亚玲,等.珠海市电磁辐射污染现况调查与对策探讨[J].实用预防医学,2012,19(6):817-819.[6]㊀罗立邦.深圳市电磁环境质量调查浅析[J].广东化工,2016,43(18):235-236.[7]㊀易丹.基于网格法的福州市射频电磁环境调查与分析[J].能源与环境,2018(06):65-67.[8]㊀张龙辉,许卓,李光,等.无锡市主城区环境电磁辐射水平现状调查[C]//2015年中国环境科学学会学术年会论文集.2015:1377-1380.[9]㊀Stefu N,Solyom I,Arama A.Radiofrequency electromagnetic field map of timisoara [J].Annals of West University ofTimisoara Physics,2015,58(1):72-80.[10]㊀段临林,杨传俊,唐超,等.厦门市电磁环境解析[J].中国环境监测,2018,34(02):122-129.[11]㊀周睿东,杨旭富,孔令丰,等.基于GIS 的车载环境电磁辐射监测系统的设计与应用[J].移动通信,2009,33(24):19-22.[12]㊀武攀峰,王国旗,陆炜,等.基于车载监测法的Ⅱ型大城市射频公众曝露探讨[J].环境监测管理与技术,2017,29(05):60-63.[13]㊀Kurnaz C,Mutlu prehensive radiofrequency electromagnetic field measurements and assessments:A city centerexample[J].Environmental Monitoring and Assessment,2020,192(6):334.[14]㊀武攀峰,王国旗,陆炜,等.基于车载移动的区域射频电磁辐射监测方法比较研究[J].辐射防护,2017,37(05):374-379.[15]㊀徐辉,李飞,李苗,等.车载巡测在区域射频电磁环境质量监测与表征中的应用分析[J].环境监控与预警,2020,12(06):32-37.[16]㊀生态环境部.5G 移动通信基站电磁辐射环境监测方法:HJ 1151 2020[S].北京:中国环境科学出版社,2020.[17]㊀谢处方.电磁场与电磁波[M].北京:高等教育出版社,2006:206.[18]㊀环境保护部.电磁环境控制限制:GB 8702 2014[S].北京:中国环境科学出版社,2014.[19]㊀国家环境保护局.辐射环境保护管理导则电磁辐射环境影响评价方法与标准:HJ /T 10.3 1996[S].北京:中国环境科学出版社,1996.[20]㊀陈为.数据可视化[M].北京:电子工业出版社,2019:305-337.[21]㊀Zhu G,Gong X,Luo R.Characterizing and mapping of exposure to radiofrequency electromagnetic fields (20-3,000MHz)in Chengdu,China[J].Health Physics,2017,112(3):266.Application of vehicle-mounted frequency-selection measurementin urban electromagnetic environment monitoringTANG Hui,GAO Peng,SU Kunpu,TANG Yanbo,XU Bin,GU Hong,LI Yuandong,MIAO Erkang(Sichuan Management and Monitoring Center Station of Radioactive Environment,Chengdu 611139)Abstract :Objective :To measure the level of urban electromagnetic environment more efficiently and accuratelyand master the composition of electromagnetic environment.Methods :The DZER100vehicle-mounted fast frequency selection measurement system was developed jointly with Chengdu Dot Matrix Technology Co.,LTD.The full-band scanning time of the system was 300ms under the condition of 30MHz -6GHz frequency bandand 100kHz resolution.With a driving speed of 60km /h and a distance of 5m between measuring points,the total field intensity,spectrum and electromagnetic environment of specific frequency band of each measuring唐㊀辉等:车载式选频测量(30MHz~6GHz)在城市电磁环境水平监测的应用㊀point can be effectively obtained.Results:14393effective point data were obtained for5.3km2area.Through automatic analysis of system data,the average electric field intensity of the whole area was about1.23V/m, and the ratio of0V/m-2V/m reached87.411%.The average value of standard ratio was1.41%,and only 0.24%of the sites accounted for more than20%.Through the spectrum visualization analysis function,the spectrum composition of the focus point and the contribution of the focus frequency band can be quickly grasped.Conclusion:The vehicle-mounted frequency selection measurement(30MHz-6GHz)can realize the simultaneous measurement of the total field intensity and spectrum of each point,which effectively solves the remaining pain points caused by the use of non-frequency monitoring instruments.The obtained data amount is far more than that of the traditional grid measurement method,and the data are more representative,which can reflect the electromagnetic environment in the region more comprehensively.The vehicle-mounted frequency selection measurement can meet various requirements such as the measurement and evaluation of the overall level of regional electromagnetic environment and the analysis of the composition of the electromagnetic environment source terms,and provide more detailed and accurate basic data for the management of electromagnetic environment through visualized data.Key words:vehicle type;frequency selection measurement;urban electromagnetic environment level;monitoring㊃出版物介绍㊃ICRU的辐射防护出版物㊀㊀国际辐射单位与测量委员会(ICRU)的最初和持续目标是对放射科医生和患者的辐射防护,最初只针对X射线和伽马射线㊂自20世纪50年代以来,辐射防护领域已扩大到其他辐射工作者的职业照射和一般公众的环境照射以及其他类型的电离辐射照射㊂ICRU一直坚持对辐射防护领域概念和计量问题的关注㊂ICRU在辐射防护概念方面的工作包括1962年采用剂量当量,以便说明辐射质量㊂在国际放射防护委员会(ICRP)采用有效剂量当量作为核心但不可测量的辐射防护量之后,ICRU制定并采用了可测量的实用量,以便能够评估外照射的防护量㊂ICRU报告39(1985年)和ICRU报告43(1988年)介绍了ICRU的实用量㊂测量这些实用量的指南报告47(光子) (1992年)和第66号报告(中子)(2001年)㊂关于实用量概念和实际实施的修订和更新,请参见关于外照射辐射防护实用量的第95(2020)号报告(与ICRP联合发布)㊂关于概念方面,ICRU发布了关于低剂量和其他特殊照射的量和报告的第86号报告(2011年)㊂作为其职权范围的一部分,ICRU公布了用于实际辐射防护的基本数据㊂1998年,ICRU发表了第57号报告, 外照射的辐射防护的转换系数 (也作为ICRP第74号出版物出版)㊂与ICRP联合编写了最新资料‘外照射辐射防护量的剂量转换系数“,并作为ICRP第116号出版物(2010年)出版㊂‘机组人员宇宙辐射照射剂量的参考数据的有效性“与ICRU联合发布在第84号报告(2010年)中㊂在辐射防护测量领域,ICRU就具体技术和程序提供了指导和建议的下列报告:关于环境中伽马射线能谱法的第53号报告(1994年)㊁关于辐射防护外部β射线剂量测定的第56号报告(1997年)㊁关于直接测定放射性核素体内含量的第69号报告(2003年)㊁关于测量和报告氡暴露的第88号报告(2012年)㊂关于电离辐射照射回顾性评估的第68号报告(2002年)已更新,并由关于急性照射后初始阶段人员剂量评估方法的第94号报告(2019年)加以补充㊂在环境照射领域,ICRU发表了关于放射生态学的量㊁单位和术语的第65号报告(2001年)㊁关于环境中放射性核素采样的第75号报告(2006年)和关于环境中伽马射线能谱法的第53号报告(1994年)㊂根据切尔诺贝利和福岛核事故后的经验教训,ICRU发布了关于放射性核素大量释放到环境中后保护公众的辐射监测的第92号报告(2015)㊂(来源:ICRU网站)。
车辆检测器工作原理

车辆检测器工作原理车辆检测器是一种用于监测和控制交通流量的设备。
它可以实时检测路上车辆的数量、车辆的速度、车辆类型等信息,并将这些信息传输到控制中心,以便对交通流量进行管理和调控。
车辆检测器的工作原理基于一系列技术,下面将详细介绍它的工作原理。
车辆检测器主要通过以下几种技术来实现车辆的检测。
1. 磁性感应技术:磁性感应技术是车辆检测器中最常用的技术之一。
它通过埋设在地面下的线圈,利用车辆通行时的磁场变化来检测车辆的存在。
当车辆经过线圈时,由于车辆的金属体对磁场的敏感性,线圈中的感应电流发生了变化,从而可以检测到车辆的存在和通过的时间。
2. 微波雷达技术:微波雷达技术是一种利用微波信号来检测车辆的存在的技术。
车辆检测器通过发射微波信号,并接收被车辆反射回来的信号来确定车辆的位置和速度。
微波雷达技术具有高精度和不受天气影响的特点,因此在一些复杂环境下常被广泛应用。
3. 视频图像处理技术:视频图像处理技术是近年来发展起来的一种车辆检测技术。
它通过设置摄像头来获取道路上的图像,并利用图像处理算法来检测和跟踪车辆。
视频图像处理技术可以通过识别车辆的外形和运动轨迹来实现车辆的检测。
4. 压力感应技术:压力感应技术是一种通过检测车辆通行时对路面施加的压力来确定车辆存在的技术。
它通常通过在道路上安装感应器来实现。
当车辆通行时,感应器会检测到路面所受到的压力变化,并将其转化为电信号进行分析和处理,从而实现车辆的检测和统计。
这些技术在车辆检测器中常常结合使用,以提高车辆检测的准确性和可靠性。
通过收集车辆的数量、速度、类型等信息,交通管理者可以及时了解道路上的交通状况,从而采取相应的措施来调度交通流量,提升道路通行效率。
车辆检测器不仅广泛应用于城市道路的交通管理中,也被用于高速公路的车流量监测、停车场的车位管理等场景中。
它的工作原理的不断改进和创新,使得车辆检测器在智能交通系统中的应用越来越广泛且更加精准。
总而言之,车辆检测器通过磁性感应、微波雷达、视频图像处理和压力感应等技术,实现对道路上车辆的检测和统计。
GPS-RTK的使用及测量

2.1RTK的概念
(一)RTK的概念
RTK是载波相位动态实时差分(Real-Time
Kinematic)方法的缩写。
RTK = 载波相位+动态+实时+差分
常规GPS测量:如静态、快速静态、动态测量,
都需要事后进行解算才能获得cm级的精度。
RTK GPS技术:能够在野外实时得到cm级的定
位精度。
2.2RTK的组成
②手簿差分
9、接入CORS单基站
10、 采控制点求参数 移动台对中控制点,到测量—碎步测量里面, 点击平滑采集,采集控制点。
采集完两个或以上控制点之后,可以求适用于小范围测区的四参数。 点击项目—参数计算—计算类型选四参数+高程拟合,高程拟合选固定差改正(三个点以上,高程拟合可以 选平面拟合方法),然后添加点对,源点选择采的点,目标点输入对应的点目标坐标系的坐标。
3、常见的各国GPS
(4)中国的北斗:
北斗导航系统(COMPASS),现有 5颗地球同步卫星 快速定位:北斗导航系统可为服务区域内用户提供全天候、高精
度、快速实时定位服务 简短通信:北斗系统用户终端具有双向数字报文通信能力,可 以 一次传送超过100个汉字的信息。 精密授时 :
未来中国的北斗空间段计划由五颗静止轨道卫星和三十颗非静止轨道卫星组成,
(四)RTK技术原理
2.5RTK技术优势
(五)RTK技术优势
优 势
实时坐标 速度快 经济高效 精度高
RTK通过基准站和移动站得 到实时差分数据,从而可以 实时解算出待测点坐标。
RTK测量一个点的时间 一般只要几秒钟。
单人即可作业。
RTK定位精度一般为 ±(10mm+10-6×D)。 因此,对于平均边长D=2km的四 等平面控制网来说,RTK的定位 精度可以达到1~ 2cm。
GPS测量原理与应用-复习试题
第一章1 GPS系统由三部分组成:空间部分、地面控制部分、用户设备部分2 GPS的空间部分: GPS卫星星座(1)设计星座:21+3,即:21颗正式的工作卫星+3颗活动的备用卫星(2)6个轨道面,平均轨道高度20200km,轨道倾角55 ︒(3)运行周期:11h 58min(4)任何时刻,在高度角15︒以上,能够同时观测到4颗以上卫星GPS卫星作用:①接收、存储导航电文②生成用于导航定位的信号(测距码、载波)。
③发送用于导航定位的信号(采用双相调制法调制在载波上的测距码和导航电文)。
④接受地面指令,进行相应操作。
⑤其他特殊用途,如通讯、监测核暴等3 GPS的地面监控部分组成:主控站:1个、监测站:5个、注入站:3个、通讯与辅助系统4 GPS的用户部分组成:用户、接收设备(GPS信号接收机、其它仪器设备)第二章1 坐标系统是由原点位置、3个坐标轴的指向和尺度所定义,根据坐标轴指向的不同,可划分为两大类坐标系:天球坐标系和地球坐标系。
(1)天球坐标系:与地球自转无关,描述人造地球卫星的位置;(2)地球坐标系:随地球自转,描述地面观测站的空间位置2.(1)天球:指以地球为中心,无限的向天空伸展的一个球体。
地轴延伸与天球有两个交点,北交点称为天北极,南交点称为天南极。
(2)通过地心与黄道面(地球绕太阳公转的轨道平面)垂直的轴线为黄轴,黄轴与天球的两个交点分别是北黄极和南黄极。
(春分点:即黄道与赤道的交点之一。
)(3)天球空间直角坐标系的定义: 地球质心O为坐标原点,Z轴指向天球北极,X轴指向春分点,Y轴垂直于XOZ平面,与X轴和Z轴构成右手坐标系。
则在此坐标系下,空间点的位置由坐标(X,Y,Z)来描述。
(4)天球球面坐标系的定义: 地球质心O为坐标原点,春分点轴与天轴所在平面为天球经度(赤经)测量基准——基准子午面,赤道为天球纬度测量基准,而建立的球面坐标。
空间点的位置在天球坐标系下的表述为(r,α,δ)。
GPS基础知识

GPS基础知识GPS基础知识.txt有谁会对着自己的裤裆傻笑。
不敢跟他说话却一遍一遍打开他的资料又关上。
用了心旳感情,真旳能让人懂得很多事。
╮如果有一天,我的签名不再频繁更新,那便证明我过的很好。
GPS基础知识驾车出行,在陌生的道路上,该往哪个方向走,哪条路最近,是停车问路还是低头看地图?都不用。
移动GPS卫星导航系统将给你包打天下。
一、GPS相关基础知识GPS即全球定位系统(Global Positioning System),简单地说,这是一个由覆盖全球的24颗卫星组成的卫星系统。
这个系统可以保证在任意时刻,地球上任意一点都可以同时观测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,以便实现导航、定位、授时等功能。
GPS全球卫星定位系统由三部分组成:空间部(GPS星座)、地面控制部分(地面监控系统)、用户设备部分(GPS 信号接收机)。
由于GPS系统受美国政府拥有和控制,在非常时期(如战争期间),民用GPS服务可能会受到影响。
1、定位导航技术的发展按照定位导航所依赖的参照物,定位导航技术的发展分为两个阶段:被动利用参照物阶段和主动建立参照物阶段。
被动利用参照物阶段:人类综合利用星历知识、指南针和航海表来进行导航和定位。
主动建立参照物阶段:二十世纪后,随着科学技术水平的不断提高,人类的思维从被动地利用宇宙中的参照物(如星体)扩展到主动地建立和利用人为的参照物来开发更精密的导航定位系统。
根据人为参照物的位置不同,主动阶段又可分为地基导航系统和空基导航系统。
(地基导航系统:地基导航系统主要由在世界各地适当地点建立的位于地面的无线电参考站组成,接收机通过接收这些参考站发射的无线电电波并由此计算接收机到发射站的距离。
目前大约有100种不同类型的地基导航系统正在运行,其中最著名的有劳兰系统(Loran C/D)、奥米加系统(OMEGA)、甚高频全向无线电信标系统(VORTAC)等。
由于地基导航系统的无线电发射参考站都建立在地球表面上,因此它们只能用来确定物体的水平位置,即只能进行二维定位,给出位置的经纬度信息。
浅谈广播电视场强覆盖车载路测系统设计

输 出一
…
车 载 电 源逆 变 器
工 控 机 ( 括 路测 仪 硬 件 部 分 和 软 件部 分 ) 包
图 1 路 测 系 统连 接 图
鼍
数据 。
2 系统 框 架 结 构
根 据 国 内不 同标 准 。 分 为地 面 电 视 、 频 广 播 、 可 调 移 动 多媒 体 广 播 等 场 强 覆 盖路 测 系统 。笔 者 主 要 针 对移 动
收看 的广 播 电视 节 目, 过 路 测 方 式 , 全 省 范 围 内 的设 定 波 段 和 频 率 广 播 节 目的 覆 盖 情 况 做 数 据 分 析 , 而得 出全 省广 播 覆 盖 通 对 从
效果 的表 格 和 图形 , 省 级 广播 电 台 的决 策 和 运 行 提供 一套 技 术 数 据 。 为
其 中 . 号 解 调 模 块 输 入 端 口接 测 试 天 线 , 出 端 口为 信 输
! :
U B, S 主要 负 责将 射频 信号 进行 解调 , 提供需 要 监测 的
数 据 , 后 传 送 给 P 软 件 . 场 强 、 包 率 、 视 频 数 然 C 如 误 音 据 等 。G S模 块 主要 提 供 地 理 信 息 数 据 , 入 端 接 G S P 输 P 天 线 。 , 度 传 感 器 提 供 测 量 环 境 的 温/ 度 。 P 模 块 温 湿 湿 路 测 仪 系 统原 理 图
路测系统 主要部 分是软硬件结合 为一体 的工控机 . 硬件部分主要完成数据的采集工作 ,软件部分主要对硬
件 采集 到 的数 据 进 行 分 析 和存 储 。使 用 者 只 需 要 接好 测 试 天线 、 P G S天线 及 传 感 器 就 可 以开 始 测 试 。 有 测 到 的 所 数 据 均 由安 装 在 工 控 机 系统 中 的 监 控 软 件 体 现 出来 。 软 件 还 可 以对 解 调 的数 据 以不 同的 方式 进 行 分 析 、 回放 , 也 可 以远 程访 问 。 统 可 以外 接 车载 逆 变 器 。 系 当工 控 机 电力
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统硬件主要包括定位及定姿传感器 D P /N 、 G S IS 立体 图
像测量传感器 、 激光扫描雷达 、 色摄影相 机 、 量设备安 装 彩 测 [ 收稿 日期 ]0 0—1 2 21 2— 9
[ 作者简 介】 易延光( 9 8一 ) 男, 16 , 黑龙江延寿人 , 高级 工程 师; 黄洪彬( 92一 ) 男, 17 , 黑龙 江佳 木斯人 , 工程师。
3 结
语
利用移 动道 路测 量系统进 行道 路及其 附属设 施 的更新 , 在外 业工作效率方 面拥有 很大 的优 势 , 无需 像控 , 至无 需 甚
于车辆 内的计算机上 , 别对应采 集各硬 件设备数 据 。系统 分
控 制 软 件 用 于 管 理 各 硬 件 , 制 软 件及 硬 件 协 调 工 作 。 控
统能够快速获取 精确 的高分辨 率 目标 的三维 空间点云数 据 ,
有效地拓宽数据来 源。激光 扫描传 感器 提供 以车 辆移 动 中
心为原点的相对 测量 点云数 据 , 这个 测量 是 自动化 的 , 使用 G S I S提供的位置和姿态信 息后 , P /N 这些点云 数据就 可 以根
电子 、 计算机等技术 的基础 上发 展起来 的, 当今 测绘 界最 是 前沿 的科技 之一 , 代表着未来道路测量的发展主流 。 它是在机动车上安装 G S 全球定位系统 ) C D 立体摄 P( 、C ( 影测量 系统 ) I S 惯性 导航系统 ) 、 ( N 或航 位推 算系统 、 光扫 激 描 系统 、 数字视频 系统 、 属性采 集 和语音 输入 等先 进 的传感 器 和设 备 , 可在车辆 的高 速行进 之 中, 速采 集道 路及 道路 快 两旁地物的地理空 间位置等 几何 数据 、 性数 据 , 属 如道 路 中
文章编号 :07—79 (0 1 0 0 8 0 10 5 6 2 1 ) 3— 2 4— 2
车 载移 动测 量 系统 的构 成 与应 用
易延 光 , 洪彬 黄
( 龙 江 省 水 利水 电勘 测 设 计 研 究 院 , 尔 滨 10 8 黑 哈 5 00)
摘 要 : 介绍了车载测量 系统 的软硬件构成 , 以及其在道路交通 、 图修测 、 地 城市规划 、 监控管理 等方面 的应 用 , 阐述了其广 阔 最后
车载移动测量系统主要 由运载车辆 、 定位及 定姿传感器 、 测量型传感器 、 机械支 承结 构 、 电源、 成控 制 电路 、 集 计算 机
及相应软件构成 。
作 为 车 载 移 动 平 台 中 的一 类 的 传 感 器 一 激 光 雷 达 扫 描 仪 正
快速成为一种三维 空间信 息 的实 时获取 手段 。激 光扫 描 系
的图像 中提取出来 。
2 3 导 航 数 据 采 集 .
这些设 备要求牢 固、 可靠 , 适应车 辆运行 于不 同路 况 , 同时不
能影 响安全行车 。
15 G S同步控 制单元 . P
同步控制单 元是车载移动测量系统 中非常重要 的硬件设 备。车载移动测量 系统包含有 多种类型 数据源 , 些数据来 这 自不同类型的传感器件 和子 系统 。在测 量车辆 运行过 程 中,
21 0 1年 第 3期 ( 3 第 9卷)
黑
龙
江
水
利
科
技
NO . .3 201 l
H i nj n c neadT cnl yo t osrac e ogi gS i c n eh o g f l a e o Wae C nevny r
( oa N .9 T dl o3 )
测 绘 出 版社 ,0 2 20.
状测 量 、 面平整 度 检测 、 路数 据采 集。 由于采 用 了高精 路 道
度 D P/ N G S IS系统 , 系统 绝对 测 量精 度 达 10mm, 对 测量 0 相
[ ] 汤国安 , 2 赵牡丹 .地理信息系统 [ .北京 : M] 科学 出版社 ,0 0 20.
光测 量系统数据采集等 , 使采集到 的数 据具 有统一 的时 间基
准, 从而能够使 激光 扫描雷达测量子 系统和 立体摄影 测量子
系 统 相 对 测 量 结 果 转 换 到绝 对 测 量 结 果 中 。
系统软件主要包括 系统 控制 软件 、 P /N G S I S数 据采 集软 件、 立体 图像采集 软件 、 光扫 描数 据采 集 软件 、 色 3 C 激 彩 CD 数字摄影相机 采集 软件 、 P /N G S I S数 据集 成 处理 软 件 、 数据
优势 。
车载移动测 量 系统 开发 成 功 以后 , 经在 测绘 、 测部 已 勘
道路 测量 、 图修测 ; 地 智能交通领 域 (T ) IS 的导航 电子 地 图的
数 据采集和生成 ; 公安部 门的交通 事故勘测 、 动违章 处理 ; 流 交通部 门的高速公 路 的修 测 、 监控 及 管理 ; 市规划 中城市 城 地图、 规划 图等 的更新 , 等等 。车载 测量 系统典 型 的应 用如
影测量 的重要传感器 , 摄影测量的基础 理论和 方法都在 近景
摄 影测 量 中得 到深 入 的应 用 。
侦察 、 安现场勘 测、 公 城市规划等领域 的系统和产 品。
13 激光扫描雷达 . 激光 扫描雷达测量子 系统 由 3台高速激 光扫 描仪构 成。
1 车载 移动 测量 系统 的构成
导航数 据采集系统信息显 示模块可以将导航数据信 息进
行图形化表示 , 与实 际路 牌对 比将 变得 很 容易 , 高工作 效 提 率; 信息变化 的地 方除 了人工 标 注电子 记号 以外 , 有实 时 还 拍摄 的数码照片 , 系统支持 地 图、 该 电子记 号 、 码照 片 3个 数 方面 自动匹配 , 提高数据 品质 ; 应用 外业采 集系统 以后 , 一部 分验证和更新工作 可 以在 内业 利用 外业作 业 时录制 的 照片
车顶设 备安 装架是指安 装各测 量硬 件设 备 的机械平 台。
在车顶平 台及 支架上 安装了 G S天线 、 P 4台彩色工业 C D相 C 机、 3C 1台 C D彩 色景观 相机 及 3台高速激 光 扫描 仪。安装
原理 , 根据车 辆 运行 的轨 迹 通过 多 图像 传 感器 采 集 彩色 图 像, 并通 过 照 相 机 记 录 道 路 中 和 道 路 两 侧 的 物 体 , 用 利 G SD P / R的集成数据 , 够提 供物 体 的绝对 坐标 和物 体 的尺 能 寸, 通过运用 3 D图像测量软件 , 可以把所需 要的信息从 保存
的 发展 前 景 和 巨大 的挖 掘 潜 力 。
关键词 : 车载 ; 移动 ; 系统 ; 测量 构成 ; 应用前景
中 图分 类号 :2 84 P 2 .
文 献 标 识 码 : B
车 载移 动测 量 系统 是 在 G S G S 航 测 遥 感 、 学 、 械 、 P 、 I、 光 机
架 、P G S同 步 控 制 单 元 、 源 和 温 控 单 元 及 计 算 机 等 。 主 要 电 设备及其功能描述如下。
就 可 以形 成 适 用 于 测 绘 成 图 、 通 安 全 、 故 处 理 、 防军 事 交 事 国
字 C D相机分别组成两组立体摄影测量单元 , C 对道路及道路 两旁地物进 行 拍 照 。作 为车 载 移 动 平 台 中的 一 类 的 传 感 器一工业彩 色数字 C D相 机是进 行地面移 动平 台的近 景摄 C
完 成 , 一 定 必 须 到外 业 进 行 。 不 24 D G 快 速 更新 . L
数据采集 的同步控制非 常重要 , 否则 不 同的数据将 失去相互
联 系的桥梁 , 能进行有 效的操作 和管理 。同步控 制单 元用 不 于从 G S中获取 时间基 准 , P 从而 控制 立体测 量 图像 采集 、 激
下。
门、 智能交通领域 、 以及城市规 划 中城 市地 图、 规划 图等 的更 新 中得 到广泛应用 , 并取得 良好效益 。
2 1 道路综合检测 . 道 路检测车的主要功能包括 : 面病害图像采集 、 路 路面形
参考 文献 :
[ ] 周忠谟 , 1 易杰军 , 周琪 . P 卫星 测量原理 与应用 [ . 京 : GS M] 北
传统的数据采集是一个非 常艰 苦的工 作 , 需要 大量人 工 现场数据采 集 和后 续 的数 据整 理 。而 该 系 统 由 于 集 成 了 G S GS及 R P 、I S基本技 术 , 它 的基础 上结 合不 同领 域 的需 在 要, 多种传感器可 以在 这个 技术平 台上 进一 步加 载 和集成 ,
整理转换软件 、 车载集成数据处理软件 , 等等。 G S IS数据采集 软件 、 P /N 立体 图像采集软件 、 激光扫 描数 据采 集软件 、 色 3 C 彩 C D数 字摄影 相机采集 软件 等软件 运行
,
车载移 动测 量系统大多用于电子地图的制作 、 道路状况 、 道路 设施 、 电力设施 的实 时监 控等方 面。其 特点是 能够迅 速 的发现变化 , 实现对原 图的及 时修 测。
据。
( 隧道 ) 、 高 交通标志 、 路设施 等。数据 同步存 储在 车载计 道 算 机系统中 , 经事后集成 、 融合及编辑 处理 , 形成各 种有用 的
感器 . 立体摄影测量子系统包括 4个百万像 素以上的工业 彩色
数 字 C D相 机 和 1台 3 C C C D彩 色景 观相 机 。4个 工 业 彩 色 数
心 线 或 边线 位 置 坐标 、 目标 地 物 的位 置 坐 标 、 ( 道 ) 、 路 车 宽 桥
1 1 定位及定姿传感器 D P/ N . G S IS
定 位 及 定 姿 子 系 统 由双 频 G S天 线 、 频 G S接 收 机 、 P 双 P