双馈电机定子磁场定向矢量控制
东汽FD77双馈式变速恒频风力发电机的控制策略
东汽FD77双馈式变速恒频风力发电机的控制策略作者:张玉辉陈琳琳来源:《电子技术与软件工程》2016年第19期摘要在分析了东汽FD77双馈式变速恒频风力发电机控制方法的基础上,从而建立了交直交变流器网的测电压电路以及转而开始测定子序磁场定向的矢量方向的磁场。
对系统的VSCF控制、并网控制技术进行了实验研究,结果表明,该系统能够,减小输出滤波电感的压降,提高了系统动态响应能力,输入输出有功、无功功率可以独立调节。
【关键词】电机风力发电交直交变流器变速恒频目前最常用的网侧控制策略是以坐标变换理论为基础的双闭环控制,来实现对有功无功功率的控制。
由于谐波的幅值以及电压频率的快速变化,用作励磁电源时会在发电机定子侧产生大量空载谐波电压,极大程度上影响了电波输出的频率,甚至是导致了并网的困难。
双馈风力发电系统变流器网侧采用PWM矢量控制,变流器转子侧则采用了定子磁场定向的去测量磁力。
并且具有双向的功率移动,输入以及输出的功率可以自行进行调节,具有不明显的谐波和闪现,可以大范围的使用。
1 系统构成双馈发电机交直交双PWM变流器则由一对三相整流/逆变器组成,二者之间由电容直流母线连接、双DSP控制器、并网保护装置以及虚拟变速风机等部分组成。
在其中的功率器械利用的是IPM模块,这个变流器的一侧利用三厢的电杆接入电网,另一侧则通过滑环和电刷接入双馈发电机的转子绕组。
并网保护装置包括转子接触器和定子接触器两个部分双馈发电机定子按星型连接,其结构示意图如图1。
2 双馈电机矢量控制2.1 双馈电机矢量控制原理交流电机转子电压含有基波和大量谐波的正、负序及零序分量。
由于零序电压在电机中产生不了零序电流,但过气隙的磁通为零。
忽略铁心的非线性饱和,将电磁曲线线性化处理,去除漏感的影响,仅仅是对电阻进行改正。
这样就可以吧交直交变流器输出的基波和各次谐波电压看做成单独在电机等效电路的转子侧电源,根据这个来计算分流、转矩和他的功率以及使用的损耗。
一种双馈电机转子电流定向的矢量控制方法

一种双馈电机转子电流定向的矢量控制方法陈显彪【摘要】针对以往双馈电机转子电流定向矢量控制方法中,由于电机会变得不稳定而无法实现超同步工况的问题,提出了一种改进的双馈电机转子电流定向控制方法,并应用MATLAB/Simulink对该方法进行了仿真分析,给出了仿真波形,验证了该控制方法的正确性.%It will be unsteady under super-synchronization by the vector control method for doubly-fed machine based on the rotor current orientation previously. On account of this, an improved method was given. Simulation analysis based on the method was carried out byMATLAB/Simulink and simulating waveforms were given to prove the correctness of the method.【期刊名称】《电机与控制应用》【年(卷),期】2012(039)003【总页数】4页(P19-21,43)【关键词】双馈电机;矢量控制;转子电流定向;仿真【作者】陈显彪【作者单位】南昌工程学院机械与电气工程学院,江西南昌330099【正文语种】中文【中图分类】TM301.20 引言双馈电机具有良好的调速性能、效率高、可改善功率因数和提高电网的稳定性等特点,特别适合于风机、水泵、压缩机等机械的调速传动[1]在双馈调速系统的设计和研究中,为了使系统的动、静态性能达到最佳,通常采用矢量控制的方法。
其核心思想是将交流电机的电流矢量分解为相互独立的产生磁场的励磁电流分量和产生转矩的转矩电流分量,将磁链与转矩解耦,再根据磁场定向原理分别设计两者的调节器,分别控制两个分量的幅值和相位,从而实现对电机的高性能调速。
刍议双馈感应电机控制策略 余东晓

如图1-a,为定子磁链定向矢量控制下的矢量定向示意图。由图可知,选择定子磁链为定量矢量,并定向在同步旋转xy坐标系的x轴上,可以容易获得定子磁链xy轴分量。1-b为电网电压控制下的矢量定向示意图,选择定子电压为定向矢量,电压矢量应于y轴保持一致,由此可以容易获得定子电压xy分量。
对于控制部分,变桨控制系统负责按指令输出恰当的桨距角,使在安全运行的前提下风能利用达到最大化。电网侧变换器通过控制转子和电网之间的有功交换来实现DC电压的维持不变动。转子侧变换器主要完成定子功率解耦环节。本文重点介绍转子侧变换器的不同控制方式。
转子侧变换器向双馈感应电机转子绕组提供电源,完成矢量控制和定子端输出的功率解耦调节。如果电机处于亚同步转速状态,转差率s>0,转子绕组吸收功率、转子侧变换器做逆变器;如果发电机为超同步转速状态运行,转差率s<0,转子绕组输送功率、做整流器;当双馈感应电机为同步运行状态时,转差率s=0,此时状态与同步发电机等同。
[4]刘涛,戴汉扬.适用于电力系统全过程动态仿真的风电机组典型模型[J].电网技术,2015年,39(3):609-614
[5]李红;李娜;何凤有.基于矢量控制的双馈风力发电技术研究[J].华东电力,2009(03)
[6]杨冬;郭家虎.变速恒频双馈风力发电机的矢量控制研究[J].电机技术,2008(05)[7]王向东;李湘宸;黄利刚.基于定子电压定向矢量控制系统的改进研究[J].自动化技术与应用,2015(11)
实际应用中,随着功率增加,定子电感更大同时定子电阻更小,即定子电压和定子磁链之间夹角可近似90°。如果不计定子电阻,该控制方式与定子磁链定向控制方案一致,故不再赘述。
5.总结
本文围绕双馈感应电机展开,简短介绍了其运行控制机理、建模情况和各部分控制方式,着重介绍了矢量控制原理,其理论基础知识为今后的深入讨论研究工作打下基础。后续将在电网电压发生变化时,对两不同矢量控制技术的区别变化做进一步研究探讨。
无刷双馈电机的控制方法研究

无刷双馈电机的控制方法研究一、本文概述随着电机技术的不断发展和应用领域的日益扩大,无刷双馈电机作为一种高效、节能的电机类型,受到了广泛关注。
无刷双馈电机以其独特的结构和工作原理,在风力发电、泵类负载、电动汽车等领域展现出显著的优势。
然而,无刷双馈电机的控制方法一直是研究领域的热点和难点。
因此,本文旨在深入探讨无刷双馈电机的控制方法,以提高其运行性能,推动其在各个领域的广泛应用。
本文首先介绍了无刷双馈电机的基本结构和工作原理,为后续的控制方法研究奠定基础。
接着,文章综述了目前无刷双馈电机控制方法的研究现状,包括传统的控制方法和近年来新兴的控制策略。
在此基础上,文章重点分析了无刷双馈电机的数学模型和控制系统设计,详细阐述了各种控制方法的实现原理和应用效果。
本文还探讨了无刷双馈电机控制方法在实际应用中的挑战和解决方案,如参数辨识、动态性能优化等问题。
通过案例分析,文章展示了无刷双馈电机控制方法在具体领域的应用实例,验证了其可行性和有效性。
本文总结了无刷双馈电机控制方法的研究成果和发展趋势,展望了未来可能的研究方向和应用前景。
通过本文的研究,旨在为无刷双馈电机的控制方法提供理论支持和实践指导,推动无刷双馈电机技术的持续发展和应用推广。
二、无刷双馈电机的工作原理无刷双馈电机(Brushless Doubly-Fed Machine, BDFM)是一种特殊的电机类型,它结合了异步电机和同步电机的特点,具有独特的运行方式和控制策略。
无刷双馈电机的工作原理主要基于电磁感应和电磁场理论,其内部包含两套极数不同的绕组,分别称为功率绕组和控制绕组。
功率绕组通常与电源直接相连,负责传递主要的电能和转矩。
控制绕组则通过变频器或其他电力电子设备进行控制,用于调节电机的运行状态。
这两套绕组在电机内部产生不同的旋转磁场,通过磁场相互作用实现电机的转矩传递和转速控制。
无刷双馈电机的独特之处在于其不需要机械换向器或电刷来实现电流换向,从而提高了电机的可靠性和维护便利性。
变流器基本原理
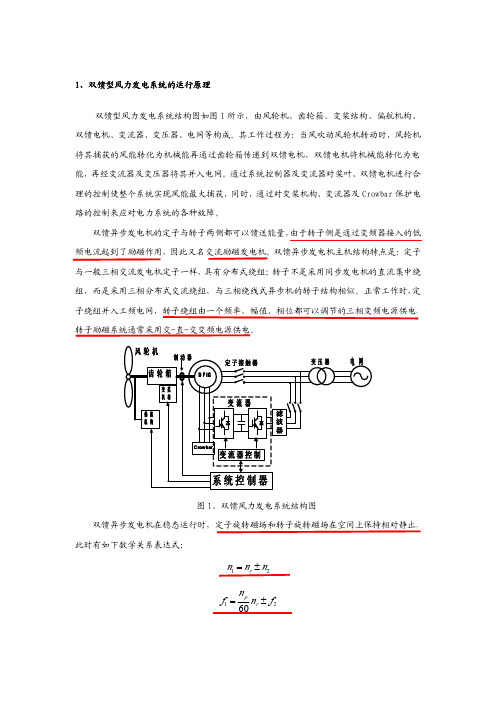
1、双馈型风力发电系统的运行原理双馈型风力发电系统结构图如图1所示,由风轮机、齿轮箱、变桨结构、偏航机构、双馈电机、变流器、变压器、电网等构成。
其工作过程为:当风吹动风轮机转动时,风轮机将其捕获的风能转化为机械能再通过齿轮箱传递到双馈电机,双馈电机将机械能转化为电能,再经变流器及变压器将其并入电网。
通过系统控制器及变流器对桨叶、双馈电机进行合理的控制使整个系统实现风能最大捕获,同时,通过对变桨机构、变流器及Crowbar 保护电路的控制来应对电力系统的各种故障。
双馈异步发电机的定子与转子两侧都可以馈送能量,由于转子侧是通过变频器接入的低频电流起到了励磁作用,因此又名交流励磁发电机。
双馈异步发电机主机结构特点是:定子与一般三相交流发电机定子一样,具有分布式绕组;转子不是采用同步发电机的直流集中绕组,而是采用三相分布式交流绕组,与三相绕线式异步机的转子结构相似。
正常工作时,定子绕组并入工频电网,转子绕组由一个频率、幅值、相位都可以调节的三相变频电源供电,转子励磁系统通常采用交-直-交变频电源供电。
图1、双馈风力发电系统结构图双馈异步发电机在稳态运行时,定子旋转磁场和转子旋转磁场在空间上保持相对静止,此时有如下数学关系表达式:12r n n n =±2160f n n f r p ±=1211r n n n s n n −==±式中,1n 、r n 、2n 分别为定子电流产生磁场的旋转速度、转子旋转速度和转子电流产生磁场相对于转子的旋转速度,1f 、2f 分别为定、转子电流频率,p n 为发电机极对数,ss n n n s −=为发电机的转差率。
由上式可知,当发电机转子转速r n 发生变化时,若调节转子电流频率2f 相应变化,可使1f 保持恒定不变,实现双馈异步发电机的变速恒频控制。
当r n <1n 时,电机处于亚同步速运行状态,转子旋转磁场相对于转子的旋转方向与转子旋转方向相同,变频器向转子提供交流励磁,定子向电网馈出电能;当r n >1n 时,电机处于超同步速运行状态,转子旋转磁场相对于转子的旋转方向与转子旋转方向相反,此时定、转子均向电网馈出电能;当r n =1n 时,2f =0,变频器向转子提供直流励磁,此时电机作为普通隐极式同步发电机运行。
双馈异步电机矢量控制系统性能分析

spr y cr ossed , ii m rt ur t n u o pna o hnajs n eseda drat epw r u e— nho u pe smnmu o c r n dflcm est nw e dut gt p e n c v o e s n or e a l i i h e i
0 引 言
矢量控制理论及应用技术经历了多年的发展 和实践 , 已经逐渐应用在双馈异步 电机 ( ob . D ul y f s cr os ah e简为 D M) e A y ho u M ci , d n n n F 的调速和变 速 恒 频 发 电 系 统 中 了 … 。在 调 速 驱 动 系 统 中 ,
要: 根据矢量控制理论和 自 动控制原理 , 立了转 子磁链 定向的双馈异步电动机 电流 模 矢 量控制 建
系统 。该 系统使用 了一种新 的电流控制 器 , 以改善 电机转子 电流波形 。控制系统可 以单独 控制电机的转速和
无功功率 , 使其工作在超 同步 、 同步 、 电流量最小和全 补偿工作方式 下。理论 分析和仿 真结果 表明 , 转子 这
mo e frd u l — d a y c r n u c i e wi e toi n e oo s e t b i e . o e c re t r g lt rwa d l o o by f s n h o o s ma h n t f h —re t d r t rwa sa l h d A n v l u r n e u ao s e hi s u e n t e c nr ls se t mp o e t e r trc re t v fr T e ma h n a e o e ae n s b s n h o o s s d i h o t y t m o i r v h oo u r n o wa e m. h c i e c n b p r td i u —y c r n u , o
电机的磁场定向控制技术研究

电机的磁场定向控制技术研究1. 引言电机是将电能转化为机械能的重要设备,在各个领域都有广泛的应用。
磁场定向控制技术是一种通过控制电机的磁场方向和大小来实现对电机性能的精确调节的方法。
本文将介绍电机的磁场定向控制技术的原理和应用。
2. 电机的磁场定向控制原理电机的磁场定向控制技术是基于磁场定向原理的。
磁场定向是指通过控制电机的磁场方向,使电机的输出转矩与给定转矩匹配的过程。
电机的磁场定向控制是通过改变电机的磁链定向来达到控制转矩和速度的目的。
电机的磁场定向控制基于两个关键技术:感应电动势矢量定向技术和电流矢量控制技术。
感应电动势矢量定向技术是通过测量电机的感应电动势,从而确定电机的转子位置和定子电流相位。
而电流矢量控制技术则是通过调节电机的相电流,来控制电机的磁场方向和大小。
3. 电机的磁场定向控制应用电机的磁场定向控制技术在工业自动化和交通运输等领域有着广泛的应用。
3.1 工业自动化在工业自动化领域,电机的磁场定向控制技术广泛应用于电动机驱动系统中。
传统的电机驱动系统需要通过传统的控制方法来控制电机的速度和力矩,而磁场定向控制技术可以实现对电机转矩和速度的高精度控制,从而提高了系统的动态性能、响应速度和稳定性。
3.2 交通运输在交通运输领域,电机的磁场定向控制技术被广泛应用于电动汽车和磁悬浮列车等交通工具中。
电动汽车采用电机的磁场定向控制技术可以实现对车速和驱动力的精确调节,从而提高了电动汽车的能效、续航里程和驾驶舒适性。
磁悬浮列车采用电机的磁场定向控制技术可以实现对列车的悬浮力和牵引力的精确控制,从而提高了列车的运行速度和安全性能。
4. 电机的磁场定向控制技术研究进展电机的磁场定向控制技术在近年来得到了广泛的研究和应用。
研究者们不断探索新的控制方法和算法,以提高电机的磁场定向控制性能。
4.1 磁场定向控制算法研究者们提出了多种磁场定向控制算法,如基于PID控制器的算法、模糊控制算法和神经网络控制算法等。
矢量控制对电机的精确定位和速度控制
矢量控制对电机的精确定位和速度控制电机的精确定位和速度控制在现代工业中扮演着重要角色。
矢量控制技术作为一种先进的电机控制策略,为电机系统提供了更高的精确度和控制性能。
本文将介绍矢量控制对电机的精确定位和速度控制的原理和应用。
一、矢量控制的基本原理矢量控制是通过改变电机的定子电流和转子磁链方向来实现对电机的精确定位和速度控制的方法。
其基本原理可以简单描述为以下几个步骤:1. 磁链定向矢量控制首先通过改变电机的定子电流,来使定子磁场的方向与转子磁场的方向相一致。
通过磁链定向,可以实现对电机磁场的精确控制。
2. 转子定向在定子磁链方向固定的基础上,矢量控制通过改变转子磁场的方向,即改变转子电流的相位和幅值,来实现对电机转子位置的控制。
转子定向是矢量控制中的关键步骤之一,通过定子和转子磁场的相互作用,可以实现电机的精确定位。
3. 相电压控制矢量控制在实际应用中,通常采用相电压控制的方式来控制电机的转矩和速度。
相电压控制通过改变电机的相电压大小和相位来控制电机的输出转矩和速度。
相电压控制可以根据实际需求实现电机的精确控制。
二、矢量控制的应用领域矢量控制技术已广泛应用于各个领域的电机控制中,包括工业生产、交通运输、家用电器等。
以下是矢量控制在几个常见应用领域的具体应用案例:1. 工业生产中的应用在工业生产中,电机的精确定位和速度控制对于提高生产效率和产品质量至关重要。
矢量控制技术可以应用于各种工业电机的控制中,例如机床、风机、泵等。
通过矢量控制,可以实现电机的精确位置控制和稳定速度调节,提高生产线的自动化水平和生产效率。
2. 交通运输中的应用交通运输领域需要对车辆的电机进行精确定位和速度控制,以提供稳定的动力输出和优化的能量利用。
矢量控制技术可以用于电动汽车、电动摩托车等交通工具的电机控制中,通过精确定位和速度控制,可以提高车辆的操控性能和节能效果。
3. 家用电器中的应用家用电器领域对电机的控制要求越来越高,要求电机能够提供稳定的转矩和精确的转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双馈电机定子磁场定向矢量控制 1 转子电流控制 在定子磁场定向的矢量控制策略中,通常将同步旋转坐标系的d轴与双馈电机定子磁场相重合,逆时针旋转90度的方向作为q轴方向,即在同步旋转dq坐标系中定子磁链可表述为:
ssdsq0
(5-1)
其中,s为定子磁链的幅值。
由此,在定子磁链定向的情况下,重写双馈电机在同步旋转坐标系中的定转子电压方程、磁链方程:
qrdrsqrrqrdrqrsdrrdrdsqssqsdsdssdsdtdirudtdiru
irudtdiru
1 (5-2)
qrrqsmqrdrrdsmdrqrmqssdrmdsssiLiLiLiLiLiLiLiL0 (5-3)
求解后,得: qrsmqsiLLi、msdrsmdsiiLLi (5-4)
其中:ms
msL
i,称为通用励磁电流
计算转子磁链如下:
qrrsmqrdrrsmmssmdriLLLiLLLiL
L
222
(5-5)
设
smrsLLLL
2
为漏磁系数,则5-5式又可表示为:
qrrqrdrrmssmdriLiLiL
L
2
(5-6) 利用式5-2计算转子电压如下:
qrrdrrmssmsqrrqrdrrqrrsdrrdridtdLiLiLLiruidtdLiLiru
2 (5-7)
式5-7便是采用电压源变流器对双馈电机转子电流控制的理论依据,式中mssmsiL
L2为双馈电机反电势所引起的扰动项,drrsiL与qrrsiL为旋转电势所
引起的交叉耦合扰动项,扰动项和耦合项给调节器的设计造成一定的困难。 为此可采用前馈补偿控制策略,把反电动势引起的扰动项和旋转电动势引起的交叉耦合项等扰动项前馈解耦后,双馈电机转子d轴电流直接由转子侧d轴端电压dru控制,转子q轴电流直接由转子侧q轴端电压qru控制。此时,当双馈
电机转子电流采用PI调节器,并以PI调节器的输出来控制式5-7中的转子电流动态项时,则转子电压dru和qru的控制方程如下:
drrmssmsqrqrirIirPqrqrrsdrdrirIirPdriLiLLiisKKu
iLiisKKu
2*
* (5-8)
其中,irPK、irIK为转子电流内环比例系数和积分系数,*dri、*qri分别为转子
电流d轴、q轴分量的指令值。
2转子电流指令 根据电磁转矩方程4-6,以及式5-4、式5-6可得在定子磁场定向同步旋转坐标系下双馈电机电磁转矩表达式为: qrmssmpqsmsmpqsdspdsqsqsdspeiiLLniiLniniinT2 (5-9)
上式表明,双馈电机在定子磁场不变,即msi恒定的情况下,双馈电机的电磁
转矩的大小与双馈电机转子电流的q轴分量成正比。 根据式4-7、式5-4,并在忽略定子电阻的情况下,可得:
qsdsdsqsqsqsdsdsiuiuQiuiuP
11 =〉msdrsmqsqrsmqsiiLLuQiLLuP11 (5-10)
上式表明,在利用转子电流q轴分量qri控制双馈电机电磁转矩的同时,也控
制了其定子侧有功功率,而定子侧无功功率的调节可通过转子电流的d轴分量dri
进行控制,而相应的dri的指令值*dri取决于具体的控制要求,如无功功率控制、
定子电压控制、功率因数控制等。 当双馈电机采用速度全控型控制策略时,双馈电机控制的外环为速度环,而转子q轴电流的指令值由速度环决定。由双馈电机的运动方程可知,若速度外环采用PI调节器,则双馈电机的电磁转矩的控制方程可表述为:
))((**
nnsKKTnInPe (5-11(a))
其中,nPK、nIK分别为速度外环的比例系数和积分系数;*n为双馈电机的
转速指令值。 或将其表述为电流指令的形式,即:
))((*2*
nnsKKiLnLinInPmsmpsqr (5-11(b))
3 定子磁链检测 由于双馈电机的特殊结构,使其定子电气量和转子电气量均可以被直接检测,所以双馈电机定子磁链有几种不同的检测方法。其中较为典型的有定子电压模型与定转子电流模型两种。
3.1 定子电压模型 对于定子电压模型法,即将检测到的定子电压、定子电流经三相静止到两相静止的Clark变换,再运用双馈电机两相静止坐标系下定子电压方程,即可求出两相静止坐标系中定子磁链的分量和分量,如式5-12所示
dtirudtirusssssassas)()(
(5-12)
在实际控制中,上式中的积分运算通常采用0.5Hz到1Hz的带通滤波器获得,以克服其直流偏置的影响。
3.2 定转子电流模型 对于定转子电流模型,即将检测出的定子电流、转子电流经三相静止到两相静止的Clark变换,再运用双馈电机的磁链方程求的两相静止坐标系中定子磁链的分量和分量,如式5-13所示
rmsssrmsssiLiLiLiL
(5-13)
于是,有 22sss
、sss1tan (5-14)
相对于定子电压模型而言,定转子电流模型法可以避免积分或准积分运算,但定转子电流模型也有其自身的缺陷;一方面观测的准确性受双馈电机参数的影响,而双馈电机的参数在运行过程中因磁化曲线的非线性(如磁饱和作用)使得这些参数较易发生改变,从而影响观测精度;另一方面,由于不能直接与电网同步,不利于软并网策略的实施。因此定子磁场的观测通常可以采用准积分电压模型进行观测,其准积分模型的表达式为:
2223)(ss
ssGbp (5-15)
上式所表达的准积分环节与纯积分环节的特性相比,如图5-1所示:
图5-1 准积分环节与纯积分环节性能对比(a:频域对比;b:时域对比) 由图5-1不难看出,准积分环节对高频交流部分具有与纯积分环节相同的特性,而对于低频部分,尤其是直流环节,准积分滤波器具有滤除直流偏置的作用。图5-1(b)同时给出了纯积分环节和准积分环节对一个初相为0的正弦信号的积分作用,由该图不难看出纯积分环节含有较大的直流分量,而准积分环节在稳态后没有明显的直流偏置。
4 控制结构图
3S/2S3S/2S定定定定定定
ssmsLis
smLL2
1s
dtds
-
+
2dtd
3S/2RrLr
L
+
+qrc
v
dri
qridrc
v
s
*2
2+--
-PIPI2R/2SSVM定定定
drcv
qrcv+
++
+*
qri
*dri
+
+))((*2*nnsKKiLnLinInPmsmpsqr
uu
ii
图5-2 定子磁链矢量定向控制结构图