机器人微分运动学
第四章机器人静力学动力学
0
nz
(
p
n
)
y
(
p
o
)
y
( p a)y
ox
oy
oz
( ( (
p p p
n)
o)
a)
ax
z z z
dx dy dz
x
ay
y
az z
{T}
根据前面导出的两坐标系{A}和{B}之间广义速度的坐标变换 关系,可以导出{A}和{B}之间广义操作力的坐标变换关系。
l1s1
l2s12
于是得到与末端速度
相应的关节速度:
显然,当θ2趋于0°(或180°)时,机械手接近奇异形位,相应的 关节速度将趋于无穷大。
4.2 机器人的静力学
0F [Fx , Fy ]T
存在怎样的关系
(1, 2 )
( f ,n)
y0
2
1
x0
机器人与外界环境相互作用时,在接触的地方要产生力 和 力矩 ,统称为末端广义(操作)力矢量。记为
n个关节的驱动力(或力矩)组成的n维矢量 称为关节力矢量
利用虚功原理,令各关节的虚位移为δqi ,末端执行器相应 的虚位移为D。根据虚位移原理,各关节所作的虚功之和与末端 执行器所作的虚功应该相等,即
简写为: 又因为
, 所以得到 与 之间的关系
式中
称为机械手的力雅可比。它表示在静态平衡状态下,
操作力向关节力映射的线性关系。
x t33
x t34
dx
x x x x
t
41
t42
t43
t44
x x x x
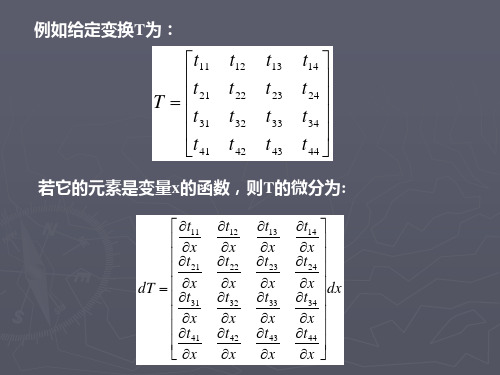
二. 微分运动
设机器人某一杆件相对于基坐标系的位姿为T,经过微运动 后该杆件相对基坐标系的位姿变为T+dT,若这个微运动是相对 于基坐标系(静系)进行的(右乘),总可以用微小的平移和旋转 来表示,即
机器人3运动微分

为微分算子, 我们称 ∆ 为微分算子,用它乘以一个坐标系将导 致坐标系的变化
进一步求得 − δz δy dx 0 δz 0 − δx dy ∆= − δy δx 0 dz 0 0 0 0 习题 对如下的坐标系B,绕y轴做 弧度的微分转动,然 对如下的坐标系 绕 轴做0.1弧度的微分转动, 轴做 弧度的微分转动 后微分平移[0.1,0,0.2],求微分变换的结果 后微分平移 , , ,
[dT ] =
[ ∆ ][ T ] = [ T ][ T ∆ ] →
[ T ] − 1 [ ∆ ][ T ] = [ T ] − 1 [ T ][ T ∆ ] [ T ∆ ] = [ T ] − 1 [ ∆ ][ T ]
因此,上式可以用来计算相对于本身坐标系的微分算子 T ∆ 。 将上式矩阵相乘并加以简化,得到的结果如下:
0 0 .1 − 0.1 Dθ = 0 0 0 .2
0 dx − 0.1 dy 0.1 dz D = JDθ = = 0 δx − 0.1 δy 0.2 δz
雅克比矩阵 假设有一组变量为 x j的方程 Y :
i
则变量和函数间的微分关系可以表示为
∂f1 ∂x δY1 1 δY ∂f 2 2 = ∂x M 1 M δYi ∂f i ∂x1 ∂f1 ∂x2 L ∂f1 ∂x j δx 1 δx2 ∂f i L L 或[δYi ] = δx j M ∂x j δx ∂f i j ∂x j
所以我们可以通过对位置方程中的时间变量求导的方法来计算雅克比矩阵假设有一组变量为的方程根据上述关系我们可以建立机器人的关节微分运动和机器人手坐标系微分运动之间的关系雅克比矩阵dzdydx雅克比机器人机器人手分旋转关节的微分运雅克比矩阵习题给定某一时刻的机器人雅克比矩阵给定关节的微分运动求机器人手坐标系的线位移微分运动和角位移微分运动
微动机器人运动学分析的基础研究

第19卷第5期仪 器 仪 表 学 报V o l .19 №5 1998年10月CH I N ESE JOU RNAL O F SC IEN T IF I C I N STRUM EN TO ct . 1998微动机器人运动学分析的基础研究3孙立宁 安 辉 张 涛 蔡鹤皋(哈尔滨工业大学机器人研究所 哈尔滨 150001)摘要 本文针对微动机器人的特点,采用微分的方法对微动机器人的运动学进行了分析,得到的六自由度并联微动机器人的输入输出的位移方程、速度方程、加速度方程均具有显式的正逆表达形式,使微动机器人的运动学分析十分方便,具有通用性。
关键词 微动机器人 并联机器人 微分 运动学1 引 言微动机器人是当前机器人研究领域中的热点课题之一。
微动机器人运动精细,可达亚微米至纳米级的定位精度。
在生物医学工程、微电子工程、微米 纳米器件的加工、超精加工、光学调焦、光纤对接等方面有着广泛的应用前景。
由于微动机器人的运动范围小,与传统的机器人相比,在运动学等方面有其自身的特殊性。
本文采用微分的方法,结合研制的压电陶瓷驱动六自由度并联微动机器人的运动学进行了研究,建立了微动机器人的正、逆运动学方程,其转换矩阵均为常数矩阵。
2 微动机器人的齐次变换对于运动范围在微米级、运动分辨率在纳米级的微动机器人,坐标转换矩阵中的正弦函数及余弦函数,因为转角Α、Β、Χ足够小,而使sin Α→Α、co s Α→1、sin Β→Β、co s Β→1、sin Χ→Χ、co s Χ→1,于是齐次变换矩阵为T 1=10 0001-Α00Α 1000 01 T 2= 10Β0 0100-Β010 0001 T 3=1-Χ00Χ 1000 0100 001坐标转换矩阵为3 国家自然科学基金、八六三高技术项目资助,本文于1997年3月收到。
T 1T 2T3=1-Χ Β0ΑΒ+Χ1-ΑΒΧ-Α0ΑΒ-ΒΒΧ+Α 1000 01(1)忽略高阶无穷小,可进一步简化得到T 1T 2T 3= 1-Χ Β 0 Χ 1-Α 0-Β Α 1 0 0 0 0 1(2)对微动机器人而言,动坐标系沿固定坐标系x 轴微小平移∃x ,沿y 轴微小平移∃y ,沿z 轴微小平移∃z ,绕X 轴旋转微小角位移∃Α,绕y 轴旋转微小角位移∃Β,绕z 轴旋转微小角位移∃r 时的坐标变换矩阵T 和增量变换矩阵∃为T =1-∃Χ∃Βx+∃x ∃Χ1-∃Αy+∃y-∃Β∃Α1z+∃z001(3)∃=0-∃Χ∃Β∃x ∃Χ0-∃Α∃y -∃Β∃Α0∃z 0000(4)3 微动机器人的特征矩阵设广义位移输入为u =[u 1,u 2,……u n ]T n ×1,广义位移输出为y =[y 1,y 2,……y n ]Tn ×1,则y 是u 的函数,表示为y=y 1y 2 y n =f 1(u 1,u 2,u 3……u n )f 2(u 1,u 2,u 3……u n ) f n (u 1,u 2,u 3……u n )(5)由泰勒公式在初始位置u =0处展开,有y i =f i (u 1,u 2,……,u n )=f i (u 1,u 2,……u n ) u=0+[f i u 1+ f i u 2… f iu n ] u=0u 1u 2u n564 第5期微动机器人运动学分析的基础研究+12!〔u 1 u 2…u n 〕 2fi u 1 u 1 2f i u 1 u 2 …… 2f iu 1 u n2f iu 2 u 1 2f i u 2u 2 …… 2f iu 2 u n 2f i u n u 1 2f i u n u 2 …… 2f inu n u=0u 1u 2u n+…(6)i =1,2,…n 。
第三章 微分运动学

(3.19)
−ωz ~ py + ω y ~ pz = 0
(3.20) (3.21) (3.22)
ωz ~ px − ω x ~ pz = 0
−ωy ~ px + ω x ~ py = 0
利用上述方程中的任意两个,可得
~ px : ~ py : ~ pz = ω x : ω y : ω z
A
v p = Av q + AωB ×
(
A
p− Aq
)
(3.31)
3.2.1.4 瞬时螺旋轴
在第二章我们介绍了 Chasles 准则, 即任意一个空间刚体运动都可以被描述为一个直线 移动叠加上一个旋转运动。其实,Chasles 已证明:刚体从一个位置到另一个位置的运动可
6
通过绕某一直线的转动加上沿平行于该直线的移动得到。 这种组合运动称为螺旋运动。 螺旋 运动的瞬时微分量称为运动螺旋, 刚体的瞬时速度可以用运动螺旋的线性分量和角度分量来 描述。 根据 3.2.1.2 节,刚体的定点转动相当于绕一个瞬时转轴的转动,这时刚体上存在着速 度为零的点,这些点就构成了瞬时螺旋轴。对于刚体的一般空间运动,情况是否也如此呢? 也就是说,刚体的任意空间运动是否都可以被描述为刚体绕某一个瞬时螺旋轴的转动?这 时,刚体上是否存在速度为零的点?下面我们来探讨这个问题。首先,假设 P 是一个固定 于{B}的点,且 v ~ p = 0 ,这时式(3.30)就简化为
)
(3.11)
将 p = RB
B A
−1 A
p 代入上式,可得
A
v P = Ω Ap
−1
(3.12)
34机器人运动学雅可比矩阵
3.把握文章的艺术特色,理解虚词在文中的作用。
4.体会作者的思想感情,理解作者的政治理想。一、导入新课范仲淹因参与改革被贬,于庆历六年写下《岳阳楼记》,寄托自己“先天下之忧而忧,后天下之乐而乐”的政治理想。实际上,这次改革,受到贬谪的除了范仲淹和滕子京之外,还有范仲淹改革的另一位支持者——北宋大文学家、史学家欧
3.4 机器人的雅可比矩阵
1、 微分运动与速度
微分运动指机构的微小运动,可用来推导不 同部件之间的速度关系。
机器人每个关节坐标系的微分运动,导致机 器人手部坐标系的微分运动,包括微分平移与微 分旋转运动。将讨论指尖运动速度与各关节运动 速度的关系。
前面介绍过机器人运动学正问题
r f ( )
一般情况:
n
Rmn
fm
n
2、与平移速度有关的雅可比矩阵
相对于指尖坐标系的平移速度,是通过把坐标 原点固定在指尖上,指尖坐标系相对于基准坐 标系的平移速度来描述
O0 x0 y0 z0 :基准坐标系 Oe xe ye ze :指尖坐标系
ze
z0
Pe
Oe
ye
xe
O0
r f ( )
r r1, r2,
, rm T Rm1
1,2 , , n Rn1
rj f j (1,2, ,n ) j 1, 2, , m
若n>m,手爪位置的关节变量有无限 个解,通常工业用机器人有3个位置变量 和3个姿态变量,共6个自由度(变量)。
阳修。他于庆历五年被贬谪到滁州,也就是今天的安徽省滁州市。也是在此期间,欧阳修在滁州留下了不逊于《岳阳楼记》的千古名篇——《醉翁亭记》。接下来就让我们一起来学习这篇课文吧!【教学提示】结合前文教学,有利于学生把握本文写作背景,进而加深学生对作品含义的理解。二、教学新
工业机器人微分运动和速度
例:如图示二自由度机械手,手部沿固定坐标系X0轴正向以1.0m/s 速度移动,杆长为l1 =l2=0.5m。设在某瞬时θ1 =30o,θ2 = -60o ,求 相应瞬时的关节速度。
对于圆柱坐标机器人,给定在相应位置的3个关节速度如下,求 手坐标系速度的3个分量。 dr/dt=0.1,dα/dt=0.05,dl/dt=0.2,r=15,α= 30o,l=10 运动顺序为:先沿x轴移动r,再绕z轴旋转α角,最后沿z轴移动l。
沿x,y,z轴的 微分运动
绕x,y,z轴的 微分旋转
d1 dx d dy 2 d 3 dz 机器人雅可比矩阵 d x 4 d 5 y z d 6
假设,坐标系noa相对于参考坐标系做一个微量的运动。 从两种不同的角度来坐标系noa的变化。
z
a' a z o' o n' n a' a o'
o
n' n
x
y
x
y
只关注手部坐标系的运动
机器人的关节做微量运动导致了 手部坐标系的微量运动
3.6坐标系的微分运动 3.6.1微分平移: Transdx, dy, dz 例3.2 cos x 1 3.6.2微分旋转: sin x x用弧度
[T dT ] [Transdx, dy, dz Rotk , d ][T ]
[dT] [Transdx, dy, dz Rotk , d I ][T ]
令: [] [Transdx, dy, dz Rotk , d I ]
↓↓
0 z y dx z 0 x dy ,称为微分算子(相 则可得: y x 0 dz 对于固定参考坐标系)。 0 0 0 0
工业机器人微分运动和速度分解
f 1 f 1 f 1 Y1 x x1 x x 2 x xi 1 2 i f 2 f 2 f 2 Y x x xi 2 1 2 x1 x 2 xi f j f j f j Y j x1 x 2 xi x1 x 2 xi
→
f j Y j xi xi
Байду номын сангаас
同理,根据上述关系,对机器人的位置方程求微分,可以得到 机器人的关节微分运动和机器人手坐标系微分运动之间的关系。
d1 dx d dy 2 d 3 dz 机器人雅可比矩阵 d 4 x d 5 y z d 6
★在多自由度的机器人中,可以用同样的方法将关节的微 分运动(或速度)与手部的微分运动(或速度)联系起来。
3.3雅可比矩阵
雅可比矩阵可以将单个关节的微分运动或速度转换为感兴 趣点的微分运动或速度,也可以将单个关节的运动与整个机构 的运动联系起来,由于两个旋转角度的值是随时间变化的,从 而雅可比矩阵各元素的大小也随时间变化,因此雅可比矩阵式 与时间相关的。雅可比矩阵可以通过使用每个位置方程对所有 变量求导来计算。
B点的 微分运动 雅可比 矩阵 关节的 微分运动
微分速度方程:
dxB l1 sin 1 l2 sin(1 2 ) l2 sin(1 2 ) d1 dy dt l cos l cos( ) l cos( ) d dt 1 2 1 2 2 1 2 2 B 1
B
微分运动方程:
dxB l1 sin 1 l 2 sin(1 2 ) l 2 sin(1 2 ) d1 dy l cos l cos( ) l cos( ) d 1 2 1 2 2 1 2 2 B 1
机器人运动学与力学建模
机器人运动学与力学建模机器人技术在现代社会中扮演着越来越重要的角色。
机器人的运动学和力学建模是机器人控制的基础,对于机器人的运动规划和控制具有重要意义。
本文将探讨机器人运动学和力学建模的相关概念和方法。
一、机器人运动学机器人运动学研究机器人的运动规律和轨迹。
它主要关注机器人的位姿(位置和姿态)以及机器人末端执行器(如机械臂的末端执行器)的运动。
机器人运动学分为正运动学和逆运动学两个方面。
正运动学是指根据机器人的关节变量来计算机器人的位姿。
它通过机器人的几何结构和关节参数,利用正向变换矩阵来描述机器人的位姿变换关系。
正运动学是机器人运动控制中的基础,可以用于确定机器人末端执行器的位置和姿态。
逆运动学是指根据机器人的位姿来计算机器人的关节变量。
逆运动学是机器人运动控制中的关键问题之一,它可以用于实现机器人的目标位姿控制。
逆运动学的求解通常需要利用数学方法和算法,例如解方程组、迭代法等。
二、机器人力学建模机器人力学建模是研究机器人运动和力学特性的过程。
它主要涉及机器人的动力学和静力学两个方面。
动力学是研究机器人在外力作用下的运动规律和力学特性。
它可以描述机器人的加速度、速度和位移等运动参数,以及机器人的力矩和力等力学特性。
动力学建模可以用于机器人的运动规划和控制,以及机器人的力学分析和设计。
静力学是研究机器人在平衡状态下的力学特性。
它可以描述机器人的静态平衡条件和力学特性,以及机器人的力矩和力等力学特性。
静力学建模可以用于机器人的结构分析和设计,以及机器人的静态平衡控制。
三、机器人运动学与力学建模方法机器人运动学和力学建模的方法有很多种,下面介绍几种常用的方法。
1. 笛卡尔坐标法:利用笛卡尔坐标系和坐标变换矩阵来描述机器人的位姿和运动规律。
这种方法简单直观,适用于描述机器人的末端执行器的运动。
2. DH参数法:利用Denavit-Hartenberg(DH)参数来描述机器人的几何结构和关节变量。
这种方法适用于描述机器人的关节变量和位姿变换关系。
机器人学微分变换
(5.17) (5.18) (5.19) (5.20)
9
比较式(5.12)和式(5.20)可知,绕任意向量k旋转dθ的微分旋转与绕x、y、
z轴分别旋转 x、 y、的 z结果相同,即
x kxd
y k y d
z kz d
由此可得到绕坐标轴x、y、z旋转δx、δy、δz的微分变换算子为
(5.21)
0 z y dx
z
0
x
d
y
0
y
x 0
0 0
dz 0
(5.22)
微分变换算子中的元素由微分平移向量d和微分旋转向量δ的各个分量组成,即
d dxi dy j dzk
(5.23)
xi y j zk
lim sin d
0
lim cos 1
0
lim vers 0
0
2019年7月24日
湖北汽车工业学院机械系
6
将上述关系代入式(5.11)可得
1 - kzdθ kydθ 0
kzdθ 1 - kxdθ 0
Rot( k, dθ) = - kydθ kxdθ 1 0
0
(5.24)
将上述二个向量组合构成一个微分运动矢量D
D d x d y d z x y z T
(5.25)
这样,我们就可根据式(5.25)给出的微分运动矢量D直接得到微分变换算
子 ,或基于T坐标的微分运动矢量 T D ( T d, T ) 的微分变换算子 T 。
2019年7月24日
由式(5.7)可得 dA A
z
机器人技术第4讲
0 0 0 .1 0
1 0 0.5 0
17
2.11 微分变换
4. 两个坐标系之间微运动的关系
实际应用中,往往需要得到某两个坐标系i和j之间的微运动关系, 即 i 与 j 之间的关系,不失一般性,假定j系就是固定系0系, 由前面的微运动可知: (2-115) T T
(2-107)
8
2.11 微分变换
1 机器人的微运动
于是变为:
Trans(d x , d y , d z ) Rot( K , d) I K z d 0 K z d 0 K y d K x d 0 0 K y d K x d 0 0 dx dy dz 0
2.11 微分变换
前几节讲述了机器人手部位姿与关节运 动间的关系,其目的是使机器人的手部 达到空间某一给定的位姿。 在对机器人进行操作与控制时,常常涉 及到机械手位置和姿态的微小变化,这 些变化可由描述机械手位姿的齐次变换 矩阵的微小变化来表示。在数学上,这 种微小变化可用微分变化来表达。
1
2014-3-24
(2-114)
表明:任意两个微分旋转的结果为绕每个轴转动元素的代数和, 即微分旋转是可加的。
0 1 例: 已知一个坐标系 A 0 0
2014-3-24
0
1
0 1 0
0 0 0
10 5 ,相对固定系的微分平移 0 1
16
2.11 微分变换
0 z y 0
2
2.11 微分变换
1 机器人的微运动
首先研究机器人杆件在作微小运动时位姿变化的表达。设机 器人运动链中某一杆件对固定系的位姿为T,经过微运动后, 对固定系的位姿变为T+dT,若该运动相对于固定系进行的, 总可以用微小的平移和旋转来表示,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ny ty by 0 0 0
nz tz bz 0 0 0
( P n) x (P t) x ( P b) x nx tx bx
( P n) y (P t) y ( P b) y ny ty by
( P n) z d x d (P t) y y ( P b) z d z n z x t z y bz z
T
称为刚体的广义速度矢量,它能完整地刻画任意刚体 在三维空间中的运动。若用差分代替微分,则上式可写为
D dx
dy
dz x y z
T
称为微分运动矢量。 微分运动矢量D在不同坐标系中的表示是不一样的, 在一个坐标系中的微分运动给定之后,如何求出在另 一坐标系中的微分运动?
根据前面齐次变换的学习知道,任意坐标系{T}在参考 系中的表示为:
一般情况下, 雅可比矩阵可以看成是矢量对矢量 的导数,如在上面的例子中:
雅可比矩阵的第i列 表示的是机械臂第i 个关节速度对机械 臂末端速度的贡献
x P 1 J T θ y 1
x 2 y 2
如果有如下所示的n个独立变量的函数
根据差积的性质: a (b c) b (a c) b (c a) (1) a ( a c) 0 (2) 则得到:
0 (n t ) (b n) ((P n) d n) (n t ) 0 ( t b ) (( P t ) d t ) T T 1T (b n) (t b) 0 ((P b) d b) 0 0 0 0
v Zi 0 i
因此得到雅可比矩阵第 i 列为:
Z i Ji 0
(移动关节)
Zi 表示i坐标系Z轴单位矢量在基础参考系中的表示。
对于转动关节 i 的运动,它在终端抓手上产生的角速度为
Z i i
同时在末端抓手上产生的线速度为矢量积 :
4.1刚体运动与微分运动的变换
v v ω r
A P A oB B P
刚体上任意一点P的 速度=固连坐标系的 平动速度+该点P绕 固连坐标系的转动速 度。
其中, ω 因此,
x
y z
T
r rx
B P
ry
rz
T
y rz z ry 0 B ω rP z rx x rz z z ry y rx y
n x n y T nz 0
则T与微分算子的积为
tx ty tz 0
bx by bz 0
px py pz 1
0 T z y 0
z 0
y x
0 0
x
0
v x n x n vy y v z nz 1 0
线微分运动
0 d 0 i 1
角微分运动
利用微分变换式
T d x n x T t d y x T d z bx T x 0 T 0 y T z 0
ny ty by 0 0 0
tx ty tz 0
bx by bz 0
px py pz 1
根据矢量差积的关系有 :
( n) x ( n) y T ( n) z 0
( t ) x ( t ) y ( t ) z 0
( b) x ( b) y ( b) z 0
对于机器人, 雅可比矩阵建立关节速度与手抓速度之间 的关系
J (θ)θ X
设机器人有n个关节, 则雅可比矩阵 : J (θ)
6n
建立机器人的雅可比矩阵是进行系统运动学分析 的基础,也贯穿于整个机器人学!!!
4.3 机器人操作臂雅可比矩阵建立的方法
(1)方法一——矢量积法 移动关节 i 的运动,它在末端抓手上产生与 Z i 轴相 同方向的线速度,且
即建立起了微分运动在不同坐标系间的变换关系。 以上推导过程和结论对机器人的速度分析,静力学分析, 动力学分析都是非常重要的。
4.2 机器人的速度正运动学方程
例:Planar 2R robot
x l1 cos1 l 2 cos(1 2 ) y l1 sin 1 l 2 sin(1 2 )
设: v 则:
A oB
z 0
x
y rx x ry
0 rz
vx
vy
vz
T
相对速度
牵连速度
v v ω r
A P A oB
B P
可表示为齐次坐标形式:
0 z A vP y 0
z 0
y x
0 0
x
0
v x rx v y ry v z rz 1 1
微分算子
0 z y 0 z 0
y x
0 0
x
0
vx vy vz 1
称为微分算子。
0 S z y
nz tz bz 0 0 0
( P n) x (P t) x ( P b) x nx tx bx
( P n) y (P t) y ( P b) y ny ty by
( P n) z d x d (P t) y y ( P b) z d z n z x t z y bz z
(( P) d ) x (( P) d ) y (( P) d ) z 0
即代表坐标系{T}在参考系中的微分运动。 若令 T 表示坐标系{T}在自身坐标系下的微分算子,则 T 同样表示坐标系{T}在参考系中的微分运动 ,因此
T
T
T
T
即:
T T
T 1
n ( n) n ( t ) n ( b) n (( P) d ) t ( n) t ( t ) t ( b) t (( P) d ) T T 1T b ( n) b ( t ) b ( b) b (( P) d ) 0 0 0 0
写成矩阵的形式有 :
其中,
f1 x 1 f 2 f J ( x) T x1 x f m x1
f T x J ( x) x y x
f1 x2 f 2 x2 f m x2
f1 xn f 2 xn 即雅克比矩阵 f m xn
另一方面, T 的定义为
T
0 T z T y 0
zT 0
T y T x
xT
0
0 0
T dx dT y T dz 0
得到:
T d x n x T t d y x T d z bx T x 0 T 0 y T z 0
z 0
x
y x
0
斜对称矩阵 (Skew Symmetric Matrix)
斜对称矩阵(Skew Symmetric Matrix)
定义:
nxn矩阵S被称为斜对称矩阵,当且仅当(iff)满足
ST S 0
sij s ji 0,
i, j 1,2,3
根据矢量的正交性和规一化 ,即
nt b t b n bn t
得到:
b t ((P n) d n) 0 b 0 n (( P t ) d t ) T T 1T t n 0 ((P b) d b) 0 0 0 0
l1 sin 1 l 2 sin( 1 2 ) l 2 sin(1 2 ) J l cos l cos( ) l cos( ) 1 2 1 2 2 1 2 1
可以看出, 雅可比矩阵也是关节角变量的函数, 同 样随机器人的位形变化而变化.
y1 f1 ( x1 , x2 , , xn ) y f (x , x , , x ) 2 2 1 2 n ym f m ( x1 , x2 , , xn )
两边求导有:
f1 f1 f1 1 1 2 n x x x y x1 x 2 x n f 2 f 2 f 2 y 2 1 2 n x x x x1 x 2 x n f m f m f m m 1 2 n x x x y x1 x 2 x n
第四讲 机器人微分运动学 (Differential Kinematics)
回顾 上一讲讨论的是机械臂末端位置和姿态与关节变量
之间的关系。称为位置运动学。
本讲目的
介绍机器人运动输入-输出的速度关系。
本讲主要内容
(1)本讲讨论机械臂末端速度、加速度与关节速度、加速度 之间的关系。称为微分运动学。
(2)斜对称矩阵、微分算子、微分运动及其坐标变换; (3)雅克比矩阵(Jacobian) (5S); (4)雅克比矩阵的求法。
sii 0
注:一般地,把所有3x3的斜对称矩阵表示为:so(3)
SSM的性质: S(k1a+k2b)=k1S(a)+k2S(b) S(a)p=a x p R, S so(3) RS(a)RT=S(Ra) XTSX=0 n