codesys置位复位指令
codesys脉冲定位指令

Codesys脉冲定位指令简介本文档将介绍Co de sy s中的脉冲定位指令。
脉冲定位指令是一种在工业自动化领域中常用的指令,用于实现对位置的精确控制。
本文将详细介绍C od es ys中常用的脉冲定位指令的使用方法和注意事项。
脉冲定位指令的概述脉冲定位指令是一种用于控制运动装置的指令,其原理是通过控制装置的运动轴,根据给定的脉冲数,将装置准确移动到目标位置。
这种指令在许多工业自动化应用中广泛使用,如机器人控制、数控机床等。
脉冲定位指令通常由一系列的参数组成,包括起始位置、目标位置、速度、加速度等。
通过调整这些参数,可以实现对位置的精确控制。
Codes ys中的脉冲定位指令在C od es ys中,提供了丰富的脉冲定位指令,可满足不同应用场景下的需求。
下面将介绍一些常用的脉冲定位指令及其使用方法。
M C_M o v e A b s o l u t eM C_M ov eA bs ol ut e指令用于将运动轴移动到指定的绝对位置。
其语法如下:M C_M ov eA bs ol ut e(a x is_n am e,po si tio n,v el oc it y,ac cel e ra ti o n)-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`po si ti on`:目标位置,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可以实现对运动轴的直接控制,使其移动到指定的位置。
M C_M o v e R e l a t i v eM C_M ov eR el at ive指令用于将运动轴相对于当前位置移动指定的距离。
其语法如下:M C_M ov eR el at iv e(a x is_n am e,di st anc e,v el oc it y,ac cel e ra ti o n)-`ax is_n am e`:指定要控制的运动轴的名称或编号。
codesys所有函数的详细说明(最新整理)

功能描述: 本功能块是用来观察手柄模拟量输入时微动开关的状态。
功能块如下图:
输入: (1) AnalogInput,UINT 型,需要观察的模拟量信号。
(2)DI_JoystickDirSwitchPOS,BOOL 型,正向微动开关。当 PAR_DirSwitchDiagnosticNotUse 为 FALSE 时,此时又手柄向正向移动,那么只有正向微动
2.8 RC 功能模块
功能描述:
RC 功能块是滤波功能块,它是对传感器信号的输入信号进行滤波。滤波公式为: y ( z ) x ( z ). 0.6 y z 1 . 0.4
功能块如下图:
输入: (1) Input,UINT 型,输入信号。
输出: (1) Output,UINT 型,输出信号。
2.9 Scale 功能块
1
0.8
y( x )
y1( x )
0.6
y2( x , progr )
y3( x , 50 ) 0.4 y3( x , 100 )
0.2
-100%
-50%
0%
50%
100%
0
0
0.2
0.4
0.6
0.8
1
x
(9)PAR_PosProgression,SINT 型。取值范围:-100~100,设置正向输出缓冲曲
(5)JoystickDirSwitchPOSMissing,BOOL 型,正向微动开关出错时,值为 TRUE。
(6)JoystickDirSwitchNEGMissing, BOOL 型负向微动开关出错时,值为 TRUE。 (7)JoystickDirSwitchPOSAndNEGOn,BOOL 型,正、负向微动开关同时为 TRUE 时,值 为 TRUE。
abplc置位复位指令

ABPLC置位复位指令1.简介在A BP LC编程中,置位复位指令是非常常用的一种指令类型。
该指令用于控制PL C程序中的某个标记位(通常称为位),将其置位或复位。
本文将详细介绍A BPL C置位复位指令的使用方法和一些常见应用场景。
2.置位指令2.1X I C指令X I C指令用于将一个位(B3:0/0、N7:0/0等)置位。
当XIC指令前面的逻辑条件为真时,该位将被置位。
下面是XI C指令的语法格式:X I C[bi t][执行条件]其中,[bi t]代表需要置位的位,[执行条件]是逻辑条件。
如果[执行条件]为真,[b it]将被置位。
2.2X I O指令X I O指令用于将一个位复位。
当X IO指令前面的逻辑条件为真时,该位将被复位。
下面是X IO指令的语法格式:X I O[bi t][执行条件]其中,[bi t]代表需要复位的位,[执行条件]是逻辑条件。
如果[执行条件]为真,[b it]将被复位。
3.常见应用场景3.1状态监控在某些场景下,我们需要对某个设备或系统的状态进行监控。
通过使用置位复位指令,我们可以将某个位与该设备或系统的状态进行关联。
例如,当温度超过设定的上限时,我们可以将一个位置位,以便进行进一步处理或报警。
3.2转移控制置位复位指令还可以用于转移控制。
比如,在自动化生产线中,当一个任务完成时,我们可以使用置位指令将一个位置位,以触发下一个任务的开始。
同样地,当需要停止某个任务时,我们可以使用复位指令将相应的位复位,以停止任务的执行。
3.3记录状态某些情况下,我们需要记录某个事件的状态,以便后续查询或分析。
使用置位复位指令,我们可以将某个位置位,表示事件发生,或将位复位,表示事件结束。
通过读取这些位的状态,我们可以得知事件发生的时间和持续时间。
4.示例代码以下是一个简单的示例代码,展示了如何使用AB PL C置位复位指令://状态监控示例X I CI:1/0/0//如果I:1/0/0为真,置位B3:0/0+---[执行相关逻辑]---+X I OI:1/0/1//如果I:1/0/1为真,复位B3:0/0//转移控制示例X I CB3:0/0//如果B3:0/0为真,置位B3:0/1+---[执行下一个任务]---+X I OB3:0/0//如果B3:0/0为真,复位B3:0/1//记录状态示例X I CI:1/0/0//如果I:1/0/0为真,置位B3:0/0+---[执行相关逻辑]---+X I CI:1/0/1//如果I:1/0/1为真,置位B3:0/1上述示例代码展示了不同应用场景下使用置位复位指令的情况,你可以根据自己的需求进行相应的修改和扩展。
codesys所有函数的详细说明.
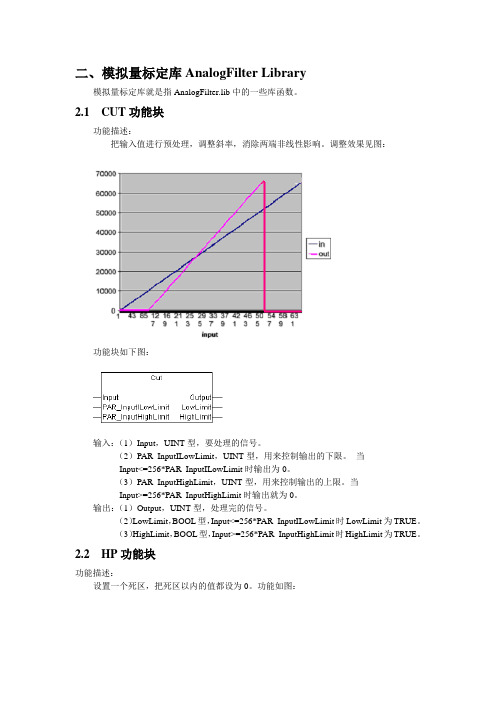
二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
codesys 指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
CODESYS 学习资料3.PDF
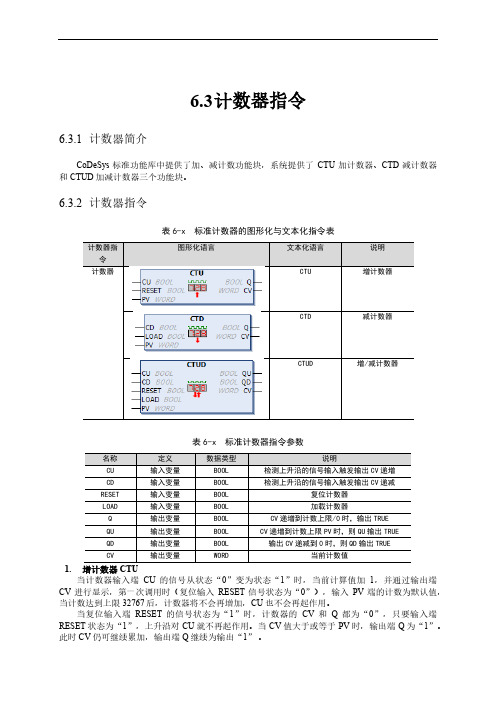
表 6-x 变量分配表
变量名 bDI_ConverySensor
bDI_Reset nCurrentValue
说明 传输带传感器信号
计数器复位按钮 当前产品总数
2. 减计数器 CTD 当减计数器输入端的 CD 信号从“0”变为状态“1”时,当前计数值减 1,并在输出端上 CV
显示当前值,第一次调用时(需要将加载输入端信号 LOAD 初始化,需要将其从“0”变为状态
CTD
减计数器
CTUD
增/减计数器
表 6-x 标准计数器指令参数
名称
定义
数据类型
说明
CU
输入变量
BOOL
检测上升沿的信号输入触发输出 CV 递增
CD
输入变量
BOOL
检测上升沿的信号输入触发输出 CV 递减
RESET
输入变量
BOOL
复位计数器
LOAD
输入变量
BOOL
加载计数器
Q
输出变量
BOOL
CV 递增到计数上限/0 时,输出 TRUE
iVar1:INT:=30; iVar2:INT:=60; iOutVar: INT; END_VAR
iOutVar:=MIN(iVar1,iVar2); 程序运行后输出结果为 30。
4. 限制值 LIMIT 功能:限制值输出。判断输入数据是否在最小值和最大值之间,若输入数据在两者之间,则直
接把输入数据作为输出数据进行输出。若输入数据大于最大值,则把最大值作为输出值。若输入数 据小于最小值,则把最小值作为输出值。
OUT := MAX(IN0, …,INn) 其参数说明详见表 6-x 所示。
表 6-x 取最大值 MAX 参数说明
codesys s指令用法

codesys s指令用法
CODESYS是一种用于编写和运行PLC(可编程逻辑控制器)程序的软件平台。
在CODESYS中,S指令是一种特殊类型的指令,用于执行速度控制和位置控制。
以下是使用CODESYS中的S指令的基本步骤:
1. 在PLC程序中定义变量:首先,需要在PLC程序中定义用于存储速度和位置的变量。
这些变量可以是整数、浮点数或实数,具体取决于控制要求。
2. 编写S指令:在CODESYS中,可以使用S指令来控制伺服电机的速度和位置。
S指令的语法如下:
```
S <速度变量>
```
其中,`<速度变量>`是之前定义的用于存储速度的变量。
3. 配置运动控制器:在使用S指令之前,需要配置运动控制器。
运动控制器是PLC中的一个特殊功能块,用于处理运动控制任务。
在CODESYS中,可以使用MC_MoveAbsolute或MC_MoveRelative等指令来配置运动控制器。
4. 运行程序:在完成上述步骤后,可以运行PLC程序。
当程序运行到S指令时,运动控制器将根据指定的速度变量来控制伺服电机的速度和位置。
需要注意的是,具体的S指令用法可能因不同的PLC型号和编程环境而有所不同。
因此,在使用CODESYS中的S指令时,建议参考PLC制造商提供的编程手册或用户指南,以确保正确使用S指令并获得预期的控制效果。
codesys所有函数的详细说明

二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在CODESYS中,置位和复位指令用于控制位或布尔变量的状态。
这些指令允许您将变量设置为特定的状态(置位为TRUE或复位为FALSE)。
置位指令(SET):该指令将指定的位或布尔变量设置为TRUE。
当执行置位指令时,目标变量的状态将被强制为TRUE,无论其先前的状态是什么。
复位指令(RESET):该指令将指定的位或布尔变量设置为FALSE。
当执行复位指令时,目标变量的状态将被强制为FALSE,无论其先前的状态是什么。
这些指令通常用于在程序中创建标志、控制流程或触发特定操作。
例如,您可以使用置位指令来激活某个功能或启动一个动作,并使用复位指令来禁用该功能或停止该动作。
在CODESYS中,置位和复位指令的语法可能因编程语言和具体的控制器而有所不同。
因此,请参阅您所使用的CODESYS版本和控制器文档,以获取准确的语法和用法说明。