铣刨机履带行走机构设计
行走机构模型设计方案

行走机构模型设计方案
在行走机构模型设计方案中,考虑到机构的稳定性和效率,我们提出以下设计方案:
1. 选择合适的行走机构类型:根据具体需求和应用场景,选择适合的行走机构类型,例如轮式行走机构、履带式行走机构或腿轮式行走机构等。
2. 确定机构结构:设计机构的物理结构、连接方式和零部件布局,确保机构具有足够的稳定性和强度。
3. 选择适当的动力系统:根据所需的运动方式和负载要求,选择合适的动力系统,如电动驱动、液压驱动或气动驱动等。
4. 考虑悬挂系统:对于一些特殊的行走机构,如多足行走机器人,需要考虑悬挂系统的设计,以保证机构在不平坦地形上的稳定性和适应性。
5. 设计智能控制系统:为行走机构设计智能控制系统,以实现高效准确的行走和导航功能。
该系统可以包括传感器、编码器和控制算法等。
6. 进行模拟和测试:使用计算机辅助设计软件进行模拟和测试,对行走机构的性能进行评估和优化。
可以使用虚拟仿真技术来模拟不同工况下机构的运动和变形。
7. 制造和组装:根据设计方案制造和组装行走机构,确保各部
件的质量和精度。
进行必要的测试和调试,以验证机构的性能和稳定性。
8. 完善和优化:根据实际使用情况和反馈意见,对行走机构进行改进和优化,以满足不同应用场景的需求。
可以修改设计方案,增加功能或改善性能。
总之,行走机构的设计方案涉及到多个方面,需要综合考虑机构稳定性、效率、动力系统、控制系统等因素,以实现行走机构的预期功能和性能。
履带式行走底盘设计资料

目录摘要 (1)关键词 (1)1前言 (2)1.1该研究的目的及意义 (2)1.2履带式行走地盘设计的国内外发展状况 (2)1.2.1国外的研究与发展 (2)1.2.2国内的研究与发展 (3)2设计任务书 (3)2.1总体设计依据 (3)2.1.1设计要求 (4)2.1.2设计内容 (4)2.2产品用途 (4)2.3产品的主要技术指标与主要技术参数 (4)2.4设计的关键问题及其解决方法 (4)3设计方案的比较分析与选择 (5)3.1行走底盘方案 (5)3.1.1履带式底盘与轮式底盘的比较 (5)3.1.2方案的确定及总体设计 (6)3.2履带行走装置的设计 (6)3.2.1履带行走装置的结构组成及其工作原理 (6)3.2.2履带 (7)3.2.3驱动轮 (7)3.2.4导向轮、支重轮和托带轮 (8)3.2.5张紧装置 (9)4履带底盘相关性能的计算 (11)4.1牵引性能计算 (11)4.2转向最大驱动力矩的分析与计算 (13)4.2.1履带转向时驱动力说明 (13)4.2.2转向驱动力矩的计算 (13)5履带底盘重要零部件的计算及校核 (17)5.1轴的设计与校核 (17)5.1.1轴的尺寸设计 (17)5.1.2轴的校核 (17)5.2驱动轮的校核 (19)5.2.1齿面接触疲劳强度校核 (19)5.2.2齿根弯曲疲劳强度校核 (19)5.3轴承的寿命校核 (20)5.4键的设计及其校核 (20)5.5机架的校核 (20)5.6螺栓的设计及校核 (21)6总结 (22)参考文献 (23)致谢 (24)履带式行走底盘设计摘要:履带式底盘的结构特点和性能决定了它在农田机耕作业中具有明显的优势。
根据农田作业对拖拉机的要求,进行履带式农用拖拉机底盘的设计。
项目研究对提高农机设计水平和农业机械化技术水平具有重要意义。
该研究应用农业机械学、汽车拖拉机学、机械设计、机械原理等理论,对履带式行走底盘的驱动行走系统进行了理论分析与研究,完成了履带底盘主要工作参数的确定和力学的计算。
小型行走机构设计与制作 子句

小型行走机构设计与制作子句小型行走机构设计与制作随着科技的不断发展,机器人技术也日益成熟,小型行走机构逐渐被广泛应用于生产和生活中。
小型行走机构的设计和制作是一个综合性强、需要掌握多方面知识的工作,本文将就小型行走机构的设计和制作,分类介绍其主要构成和制作步骤。
一、机构构成分类根据不同的用途和工作环境,小型行走机构的构成也有所不同。
现在常见的小型行走机构,可以分为以下四种:1.轮式行走机构这种机构最常见,很多机器人都是采用轮式行走机构,例如“扫地机器人”、“机器人小车”等等。
这种行走机构主要构成包含轮、驱动轮和悬挂系统。
2.履带式行走机构履带式行走机构是一种多层带组成的弹性构件,能够适应不同的路面环境,特别是在不平整的地形下运行时比轮式机构更稳定,常用在“运输机器人”、“探矿机器人”等环境下。
3.多足式行走机构多足式行走机构是模仿昆虫运动机理而设计的,具有良好的爬升能力,在困难的地形中经常使用。
多足式行走机构的构成和运动控制较为复杂,主要构成包括腿和腿部关节。
4.蠕行式行走机构蠕行式行走机构又称蠕动式或爬行式行走机构,它是模仿蛇或虫类运动原理而设计的一种行走方式,主要构成包括驱动装置和动力装置等。
二、机构制作步骤小型行走机构的制作需要考虑到整个机构的结构、功能和外观等多方面的问题,下面简要介绍机构制作的几个关键步骤:1.确定机构形状和运动方式不同类型的小型行走机构结构不同,需要事先在纸上或计算机上进行设想和模拟,应该确定机构的比例和结构形状,运动方式,以及各部件之间的联动关系。
2. 如何选择电机电机是小型行走机构的重要组成部分,需要根据机构的大小和负载,选用适当的电机。
在选用电机时需要考虑到电机的性能参数、被动部件的摩擦系数、运动部件的重量和运动方式等。
3.材料的选择及加工方法小型机构的制作通常采用钢、铝、铜等金属材料,也有用树脂、塑料等制作的情况。
加工方法也有焊接、钻孔、切割等多种方式,需要根据机构的结构设计和材料特性灵活选择。
铣刨机行走系统和铣刨系统的计算和选型-推荐下载

������������-铣刨深度,范围是 0~250������������
������-工作速度,范围是 0~20m/min
式中:������������—铣削阻力
������1-铣削功率系数,取1.2 × 107
������-铣刨宽度,取 1000mm
������������-铣刨深度,范围是 0~250������������
1m 铣刨机的铣刨系统和行走系统参数设计
4.1 铣刨系统参数设计
铣刨鼓马达的基本参数主要是排量 ������������������和转速,在选取时就必须满足鼓
的动力及转速的要求。
整机重量 设计速度
爬坡度要求 铣刨鼓速度 铣刨鼓直径 铣刨宽度 铣刨深度 行走速度 工作速度
4.1.1 铣削功率和铣削阻力
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术通关,1系电过,力管根保线据护敷生高设产中技工资术艺料0不高试仅中卷可资配以料置解试技决卷术吊要是顶求指层,机配对组置电在不气进规设行范备继高进电中行保资空护料载高试与中卷带资问负料题荷试2下卷2,高总而中体且资配可料置保试时障卷,各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并22工且22作尽22下可22都能22可地护以缩1关正小于常故管工障路作高高;中中对资资于料料继试试电卷卷保破连护坏接进范管行围口整,处核或理对者高定对中值某资,些料审异试核常卷与高弯校中扁对资度图料固纸试定,卷盒编工位写况置复进.杂行保设自护备动层与处防装理腐置,跨高尤接中其地资要线料避弯试免曲卷错半调误径试高标方中高案资等,料,编试要5写、卷求重电保技要气护术设设装交备备置底4高调、动。中试电作管资高气,线料中课并敷3试资件且、设卷料中拒管技试试调绝路术验卷试动敷中方技作设包案术,技含以来术线及避槽系免、统不管启必架动要等方高多案中项;资方对料式整试,套卷为启突解动然决过停高程机中中。语高因文中此电资,气料电课试力件卷高中电中管气资壁设料薄备试、进卷接行保口调护不试装严工置等作调问并试题且技,进术合行,理过要利关求用运电管行力线高保敷中护设资装技料置术试做。卷到线技准缆术确敷指灵设导活原。。则对对:于于在调差分试动线过保盒程护处中装,高置当中高不资中同料资电试料压卷试回技卷路术调交问试叉题技时,术,作是应为指采调发用试电金人机属员一隔,变板需压进要器行在组隔事在开前发处掌生理握内;图部同纸故一资障线料时槽、,内设需,备要强制进电造行回厂外路家部须出电同具源时高高切中中断资资习料料题试试电卷卷源试切,验除线报从缆告而敷与采设相用完关高毕技中,术资要资料进料试行,卷检并主查且要和了保检解护测现装处场置理设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
小型行走机构设计与制作 子列

小型行走机构设计与制作子列小型行走机构是一种可以在地面上移动的机构,通常用于机器人、小型车辆或其他移动设备中。
设计与制作一个高效的小型行走机构对于提高机器人的运动性能至关重要。
在本文中,我们将讨论如何设计和制作一个小型行走机构。
一个小型行走机构通常由几个关键部件组成,包括驱动系统、轮子或履带、传感器和控制系统。
驱动系统可以是直流电机、步进电机或伺服电机,用于提供动力驱动机构移动。
轮子或履带则用于接触地面并使机构移动。
传感器可以用来感知环境,帮助机构做出智能决策。
控制系统则负责控制驱动系统和传感器,使机构按照预定路径移动。
在设计小型行走机构时,首先需要考虑机构的尺寸和重量。
尺寸越小,机构的灵活性和机动性就会越好,但需要确保机构足够稳定以支撑自身重量和外部载荷。
同时,重量也是一个重要因素,过重的机构会增加驱动系统的负担,影响机构的运动性能。
选择合适的驱动系统也是设计小型行走机构的关键。
直流电机通常用于简单的小型机构,步进电机适用于需要精确位置控制的应用,而伺服电机则适用于需要高速和高精度控制的机构。
根据机构的应用场景和需求,选择合适的驱动系统至关重要。
轮子或履带的设计也需要根据机构的应用场景来选择。
对于需要在不平坦地面上移动的机构,履带通常比轮子更适合,因为履带可以提供更好的抓地力和通过性。
而对于需要在平坦地面上快速移动的机构,轮子可能是更好的选择。
除了驱动系统和轮子或履带,传感器的选择也至关重要。
传感器可以帮助机构感知环境,如红外传感器用于检测障碍物,超声波传感器用于测距等。
根据机构的应用需求,选择合适的传感器可以提高机构的智能化水平。
控制系统的设计也是设计小型行走机构的重要一环。
控制系统可以基于单片机、嵌入式系统或无线模块实现。
通过合理设计控制算法和通信协议,可以实现机构的自主导航、避障等功能,提高机构的智能化水平。
设计与制作一个高效的小型行走机构需要考虑多个方面,包括尺寸、重量、驱动系统、轮子或履带、传感器和控制系统等。
履带式行走机构设计分析和研究
2 .M e h n c lEn i e rn n t ma i n I s i t ,No t i e st fCh n ,Tay a 3 0 1 c a ia g n e i g a d Au o t n t u e o t r h Un v r i o i a y i u n 0 0 5 ,Ch n ) ia
走机构 的设计 原则 和运动 受 力分析 , 结机 构 行走 时 的影 响 因素 , 总 以达 到 整 个机 构 结 构合 理 、 全 可靠 、 安
行 动 灵 活 的 目的 。
关键 词 : 带行走 机 构 ; 履 运动 受 力 ; 驱动 ; 影响 因素 中图分类 号 : 1 . TH 2 3 7 文 献标 志码 : A
Ab t a t: sr c The ta ke l i g m e ha im st e s r c d wa k n c n s i h upp tn r o h e m a h n ori g pa tf rw ol c i e,s c a e ha s i p id u h ashe vy m c nim sa ple
ZH AO u Y ,Y A N o H ngwe。 i
ቤተ መጻሕፍቲ ባይዱ
De in A n l ss a d Re e r h o a ke a ki g M e ha im sg a y i n s a c n Tr c d W l n c n s
( . mp e e E u p n s a c n t u e o h n i e f n - e g e I d s r o p C . 1 Co l t q i me tRe e r h I s i t fS a x i g F n l i n u t y Gr u o ,L d,Tay a 3 0 9 t B a t i u n 0 0 0 ,Ch n ia;
2m路面铣刨机总体结构设计方案研究

2m路面铣刨机总体结构设计方案研究路面铣刨机作为公路及城市道路养护的专用设备,根据目前的我国公路发展的统计情况来看,未来公路养护对路面铣刨机的需求将会逐年增加。
文章详尽地分析了路面冷铣刨机的总体结构,并对路面冷铣刨机的总体结构进行了设计,为进一步研究路面冷铣刨机结构设计提供参考。
标签:铣刨机;工作原理;总体设计;主要参数引言路面铣刨机是一种高效的沥青路面维修养护设备,其原理是利用滚动铣刨的方法把混凝土路面局部或全部破碎,铣刨下来的沥青碎料经再生处理后,可直接用于路面表层的重新铺筑。
主要用于公路、城镇道路、机场、货场、停车厂等沥青混凝土土地面层的开挖、翻修,可以高效地清除道路痈包、油浪、网纹、车辙等,还可用于水泥路面的拉毛及面层错台铣平;亦可开挖路面坑槽及沟槽,铣削公路的边缘,恢复其排水能力;也可兼作简单的路面整形作业和整体再生。
1 国内外发展情况1.1 国外发展情况国外路面铣刨机起源于二十世纪五十年代初,经过五十年的发展,积累了丰富的研制应用经验。
随着现代机、电、液一体化技术的成功应用,其技术参数、整机性能、外观形象等得到突破性进展,形成了以德国维特根公司产品为代表的欧洲风格和以美国卡特彼勒公司、RoadTech公司、CIM公司产品为代表的北美风格。
它们的工作原理相同,发动机的装机容量基本相当;区别在于欧洲的铣刨机采用四履带行走方式,外形结构紧凑、精巧,更多的采用电子控制技术,特别是目前的数字电子网络控制技术。
而北美的铣刨机均采用三履带行走方式,造型粗犷,更加坚固。
其产品已形成系列化,生产效率一般为150m2/h-2000m2/h,铣刨宽度为0.3m~4.2m。
最大铣刨深度可达350mm。
1.2 国内发展情况国内沥青路面铣刨机的发展起步于二十世纪八十年代,1985年交通部将“沥青路面旧料再生设备的研究”列为重点科研项目。
随后,湖北襄樊公路机械厂以铁牛55型拖拉机为底盘,研制了一种简易的1m铣刨机。
整体式履带行走机构驱动轮设计及CAE分析

整体式履带行走机构驱动轮轮齿设计及CAE分析郭赟、王宇(三一重型装备有限公司,沈阳110027)摘要:驱动轮作为煤矿机械行走机构的关键零件,其结构的优劣直接影响设备性能及行走机构的使用寿命。
本文介绍两种驱动轮轮齿的结构设计方法,并且进行CAE分析,验证安全系数。
关键字:驱动轮;结构设计;安全系数Abstract:It is a key part that the drive wheel is in traveling mechanism of coal mine machinery,such configuration is well or not that will make a impact on equipment performance and life of traveling mechanism.The article introduce that there are two sorts of configuration and comparing with them, and making CAE analysis to validate safety factor.Key words: drive wheel; wheel-tooth configuration design; safety factor0引言煤矿机械的主要工作场所是煤矿巷道,巷道工作面空间狭小,如果机械零部件发生故障,维修很不方便,这决定了机械零部件要有很高的可靠性。
煤矿掘进机械全部采用履带行走机构,在掘进设备工作时,经常需要前后运动以及从此工作面移向另一工作面,并且在巷道有坡度时,掘进设备还需要上山或下山移动,这决定了行走机构要有很高的可靠性。
行走部驱动轮作为煤矿机械行走机构的关键零件,其结构的优劣直接影响设备性能及行走机构的使用寿命。
1行走机构简介大多数工程机械都采用履带行走机构,履带又分为组合式履带与整体式履带。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
路面冷铣刨机履带行走机构设计参数分析
1、概述
近几年来随着我国公路建设普遍进入维修期,路面冷铣刨机(图1)得到
了迅速的发展。由于履带行走机构具有牵引力大、接地比压低、爬坡能力强、转
弯半径小等优良的特点,所有大型路面冷铣刨机(铣刨宽度≥1.5米)均采用了履
带行走机构。
图1路面冷铣刨机外形示意图
履带行走机构是大型路面冷铣刨机整机的支承件,用来支承整机的重
量,承受铣刨机构在铣刨作业过程中产生的力,并完成铣刨机在铣刨、装运、转
场时的移动。路面冷铣刨机一般设计成四履带或三履带驱动结构(其中三履带驱
动结构其后部支撑为一条履带),履带沿着铣刨机纵向中心对称布置。履带行走
机构主要包括导向轮、张紧装置、履带架、支重轮、驱动装置、链轨及履带板等
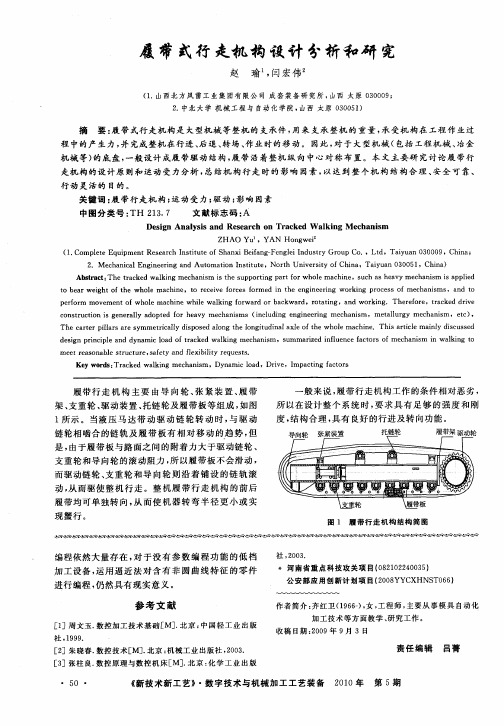
组成。如图2所示。
图2履带行走机构结构图
当液压马达带动驱动链轮转动时,与驱动链轮相啮合的链轨及履带板有
相对移动的趋势,但是,由于履带板与路面之间的附着力大于驱动链轮、支重轮
和导向轮的滚动阻力,所以履带板不会滑动,而驱动链轮、支重轮和导向轮则沿
着铺设的链轨滚动,从而驱使路面冷铣刨机行走。路面冷铣刨机履带行走机构的
前后履带均可单独转向,从而使机器转弯半径更小或实现蟹行。
2、路面冷铣刨机履带行走机构主要设计参数分析
2.1平均接地比压的计算确定
式中:P——路面冷铣刨机的平均接地比压
G——路面冷铣刨机的重力
b——履带板的宽度
L——单条履带行走机构的接地长度
平均接地比压主要根据地面条件、聚氨脂履带板允许压强、机器的附着
性能、机器的外形尺寸进行合理选取。在设计路面冷铣刨机时,在结构允许的范
围内,尽量取小值,推荐平均接地比压p≤0.26Mpa。
在行走机构设计中,履带的接地比压不得出现三角形分布状态,不得在
履带接地长度上出现零比压,路面冷铣刨机重心位置应在四履带(三履带)的中
心。
2.2履带接地长度与履带板宽度的推荐范围
接地长度L与履带板宽度b的合理配合,对提高路面冷铣刨机的牵引附
着性能有较大的影响。窄长的履带,滚动阻力较小,有较好的牵引附着性能,但
转向阻力较大,会导致路面冷铣刨机转弯功率的增加,转弯困难。路面冷铣刨机
的b/L推荐一般为:0.20~0.28。受机器结构的限制,路面冷铣刨机的履带接地长
度一般在1000~1800mm之间,履带板宽度一般在250~380mm之间。
2.3左右履带中心距的推荐范围
在铣刨宽度尺寸的影响范围内,为保证机器的稳定性,降低机器的转弯
功率,应尽量增大履带的中心距。前轴中心距推荐范围1500~1700mm,后轴(四
履带)中心距推荐范围1400~1600mm。
2.4行走速度推荐范围
推荐履带式路面冷铣刨机工作、移动速度为0~5Km/h(84m/min)。
工作速度根据铣刨机铣刨路面的情况确定。铣刨厚度较厚的沥青层
(32cm)应选用较低的速度,以减少铣刨截齿的损耗;铣刨拉毛厚度较薄的水泥层
(1cm)可选用较高的速度,以提高铣刨效率。为了减少履带机构的磨损,移动速
度应控制在5Km/h以内。
2.5履带对地面附着力的校核计算
履带行走机构的牵引力必须大于或等于各阻力之和,但应小于或等于履
带对地面的附着力。
T0=φG(3)
式中:T0——路面冷铣刨机的附着力
φ——附着系数
附着系数可根据表1选取。
表1不同路面的附着系数φ
路面土质 附着系数φ 路面土质 附着系数
φ
混凝土 0.45 松散砾石 0.50
干粘土 0.90 压实雪地 0.25
湿粘土 0.70 冰 0.12
压实粘土 0.70 坚实土路 0.90
干沙土 0.30 松散土路 0.60
湿沙土 0.50 煤场 0.60
岩石坑 0.55
2.6履带张紧装置静态张紧力的计算确定
履带的静态张紧度是按履带松边(上方区段)的下垂量h的值确定。下垂
量h的一般取:
h=(0.015~0.03)L0(4)
式中:h——履带的下垂量
L0——张紧轮与驱动轮间中心距
受铣刨机履带行走机构结构尺寸限制,在设计中一般没有托轮。因此,
履带的静态张紧力TE可按下列公式计算:
式中:T1——履带的静态张紧力
g——一块履带板、链轨及连接螺栓组的重量
lt——链轨节距
公式符号意义见图3
图3履带的静态张紧力计算示意图
2.7履带张紧装置行程的推荐范围
张紧装置的行程应大于履带节距的一半,以便在履带因磨损而伸长时可
拆去一块而继续使用。受铣刨机结构尺寸限制,张紧装置的行程一般应设计在
0.65~0.85个履带节距。
2.8履带行走机构牵引力的计算确定
履带行走机构的最小牵引力应满足路面冷铣刨机在最大设计坡度上作
业、爬坡和转弯等工况的要求,最大牵引力应小于在水平路面履带的附着力。一
般情况下,履带行走机构爬坡不得与铣刨作业、转弯同时进行。路面冷铣刨机在
最大设计爬坡能力时的牵引力为最大,而且移动速度低,空气阻力可以忽略不计,
所以履带行走机构的牵引力的计算以下列公式为依据。
T2=Tf+Ti=fG+sinαG(6)
式中:T2——履带行走机构的牵引力
Tf——履带行走机构的滚动阻力
Ti——履带行走机构的坡道阻力
f——履带行走机构的滚动阻力系数
α——最大设计坡度角
不同土质路面的滚动阻力系数f见下表2:
表2不同土质路面的滚动阻力系数f
路面土质 滚动阻力系数f
混凝土 0.05
冻结冰雪地 0.03~0.04
坚实土路 0.07
松散土路 0.10
泥泞地、沙地 0.10~0.15
2.9履带行走机构输入功率的确定
P=T2V/η1η2(7)
式中:P——履带行走机构的输入功率
V——履带行走机构工作时的行走速度
η1——履带链的传动效率。取0.89~0.92
η2——驱动装置减速机的传动效率
2.10驱动链轮的设计原则
路面冷铣刨机驱动链轮为延长寿命一般采用间齿啮合,齿数取15~23;
为降低齿面接触应力采用凹齿齿形。计算载荷为单根履带行走机构的最大牵引
力,并假定其扭矩仅有一个轮齿传递,同时轮齿还应进行弯曲和挤压强度校核计
算。
2.11支重轮的设计原则
路面冷铣刨机采用四履带结构时,其后面两条履带一般采用浮动方式,
以保证四履带三点定位,单个支重轮可能承受整机重量的25%,所以每个支重轮
应能承受不小于整机25%重力的径向载荷;当采用三履带结构时,其后面的履带
单个支重轮可能承受整机重量的50%,所以后面的履带支重轮应能承受不小于整
机50%重力的径向载荷。
2.12导向轮的设计原则
路面冷铣刨机一般履带行走机构采用后驱动方式(受结构限制,也有采
用前驱动方式)。当铣刨机后退时,导向轮承受2倍的牵引力,所以导向轮应能
承受不小于2倍最大牵引力的径向载荷。
3、结束语
在BG2000型路面冷铣刨机设计过程中,根据以上分析结果确定了履带
行走机构的主要技术参数。该机经广大客户多年使用,履带行走机构使用状态良
好,完全能满足使用要求,证明上述履带行走机构主要技术参数的分析是完全正
确的。