西门子KTP触摸屏在房间温度PID控制中的设计与应用
PID温度控制的实现
PID温度控制的实现PID温度控制是一种常用的控制方法,可以应用于各种温度调节的场景,如炉温控制、恒温器控制、温室控制等。
PID是比例、积分、微分的简称,它通过不断调整输出信号的大小来控制温度的变化,以使温度尽可能稳定在设定值。
PID控制器的实现需要以下几个关键步骤:1.设置控制目标:在开始实施PID控制之前,需要首先设定好控制的目标温度和误差范围。
例如,我们要将温度控制在25摄氏度左右,可以设置误差范围为±0.5摄氏度。
2.采集温度信号:温度控制器需要实时监测被控对象的温度变化情况,因此需要使用温度传感器来采集温度信号。
温度传感器可以是热电偶、热敏电阻或红外线传感器等。
3.根据误差计算PID输出信号:PID控制的核心是根据温度误差来计算输出信号。
误差是设定温度与实际温度之间的差异,可以通过对差值取绝对值或者平方等方法来表示。
PID控制器根据误差值来调整控制量的大小,使得误差尽可能地减小。
3.1比例控制(P控制):比例控制是根据误差的大小,通过乘以一个比例系数Kp来调整控制量的大小。
具体计算公式为:P = Kp * Error。
其中,Kp是比例系数,Error是温度设定值与实际温度的差异。
3.2积分控制(I控制):积分控制是对误差进行累计,以减小稳态误差。
它通过乘以一个积分系数Ki来调整控制量的大小。
具体计算公式为:I = Ki * ∑(Error * dt)。
其中,Ki是积分系数,∑(Error * dt)是误差的积分值,dt为采样时间间隔。
3.3微分控制(D控制):微分控制是根据误差变化的速率来调整控制量的大小,以抑制温度的过冲或超调。
它通过乘以一个微分系数Kd来调整控制量的大小。
具体计算公式为:D = Kd * (dError/dt)。
其中,Kd是微分系数,(dError/dt)为误差的微分值,表示误差的变化速率。
4.计算总的输出信号:总的输出信号可以通过加权求和来计算,即 Output = P + I + D。
PID控制器参数整定与应用

PID控制器参数整定与应用PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
比例控制器根据当前的偏差与参考值之间的差异给出一个输出。
积分控制器根据偏差随时间的累积计算输出,用于消除系统的稳态误差。
微分控制器根据偏差的变化率给出输出,用于稳定系统的动态响应。
PID控制器的输出是比例、积分和微分控制器的输出之和。
参数整定是指选择合适的PID控制器参数,使得控制系统能够稳定工作且具有良好的响应速度和抗干扰能力。
PID控制器的参数整定一般有以下几种方法:1.经验法:根据经验和实际控制系统的特点选择参数。
这种方法适用于控制系统较简单的情况,但不具有普适性。
2. Ziegler-Nichols方法:通过实验数据来确定参数。
首先将积分和微分参数设为零,逐渐增加比例参数,直到系统出现较小的超调(即超过参考值后回波的百分比),然后根据超调曲线确定比例和时间参数。
3. Chien-Hrones-Reswick方法:通过频域分析来确定参数。
首先将系统转化为频域传递函数,然后根据传递函数的特性来选择参数。
4.自整定方法:使用专门设计的算法来进行参数整定。
这些算法根据系统的频率响应和阶跃响应等特征进行参数的优化。
1.温度控制:PID控制器可以通过调节加热元件的功率来控制温度的稳定性和响应速度。
例如,在恒温恒湿箱中,通过测量温度偏差,计算出PID控制器的输出,来控制加热器的功率,使系统保持在设定温度下。
2.流量控制:PID控制器可以通过调节阀门的开度来控制液体或气体的流量。
例如,在一个水罐中,通过测量液位偏差,计算出PID控制器的输出,来控制阀门的开度,以维持设定的液位。
3.速度控制:PID控制器可以通过调节电机的输入电压或转矩来控制机械系统的速度。
例如,在一个电动机驱动的输送带系统中,PID控制器可以根据输送带的位置偏差,计算出对电机的控制信号,来控制输送带的速度。
4.位置控制:PID控制器可以通过调节电机的转矩或位置来控制机械系统的位置。
【步骤详解】西门子PLCPID组态设置及PID常见问题解答

【步骤详解】西门⼦PLCPID组态设置及PID常见问题解答1PID控制知识讲解S7-200 SMART能够进⾏PID控制。
S7-200 SMART CPU最多可以⽀持8个PID控制回路(8个PID指令功能块)PID是闭环控制系统的(⽐例-积分-微分)PID控制器根据设定值(给定)与被控对象的实际值(反馈)的差值,按照PID算法计算出控制器的输出量,控制执⾏机构去影响被控对象的变化。
PID控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
根据具体项⽬的控制要求,在实际应⽤中有可能⽤到其中的⼀部分,⽐如常⽤的是PI(⽐例-积分)控制,这时没有微分控制部分。
PID算法在S7-200 SMART中的实现PID控制最初在模拟量控制系统中实现,随着离散控制理论的发展,PID也在计算机化控制系统中实现。
2PID向导组态设置Micro/WIN SMART提供了PID Wizard(PID指令向导),可以帮助⽤户⽅便地⽣成⼀个闭环控制过程的PID算法。
此向导可以完成绝⼤多数PID运算的⾃动编程,⽤户只需在主程序中调⽤PID向导⽣成的⼦程序,就可以完成PID控制任务。
PID向导既可以⽣成模拟量输出PID控制算法,也⽀持开关量输出;既⽀持连续⾃动调节,也⽀持⼿动参与控制。
建议⽤户使⽤此向导对PID编程,以避免不必要的错误。
PID向导编程组态步骤:1.在Micro/WIN SMART中的⼯具菜单中选择PID向导:图1. 在⼯具栏中选择PID向导图2.在项⽬树中打开'向导'⽂件夹,然后双击'PID',或选择'PID'并按回车键。
定义需要配置的PID回路号图3.在此对话框中选择要组态的回路图4.最多可组态 8 个回路。
在此对话框上选择回路时,PID 向导左侧的树视图随组态该回路所需的所有节点⼀起更新。
2.为回路组态命名图5.可为回路组态⾃定义名称。
基于SMART200的温度PID控制系统设计与调试设计

学号127301116 苏州市职业大学毕业设计题目基于SMART200的温度PID控制系统设计与调试学生姓名:专业班级: 12电气自动化技术(1)班学院 (部):电子信息工程学院校内指导教师:(副教授)校外指导教师:完成日期:2015年5月摘要:温度是工业和科学实验中最常见和最重要的热工参数之一了。
现在产品对于温度控制的精度要求越来越高。
无论是在科学领域还是我们的生产实践中,温度控制都是极其重要的,特别是像冶金、化工、石油、机械、建材等大型工业中,都占有着极大的比重。
而温度控制的系统也有很多种,PLC凭借着它较高的可靠性,较强的抗干扰能力,已经成为许多用户信赖的产品,而且他的操作也较为简单。
本文介绍了西门子S7-200smart设计硬件与Smart700IE 7寸触摸屏。
PLC是数字控制型的电子计算机,他运用了可编程存储器的储存指令,具有顺序、逻辑、计数、计时等一些功能。
可以通过模拟输入、输出和数字输入输出等组件,进行控制各种程序和设备。
关键词:PLC 温度控制PID 触摸屏AbstractTemperature industrial and scientific experiments, the most common and the most important thermal parameters of. Now products are increasingly high requirements for precision temperature control. Whether in science or our production practices, the temperature control is extremely important, especially as the metallurgical, chemical, petroleum, machinery, building materials and other large industry, has played a significant proportion. The temperature control system there are many, PLC With its high reliability, strong anti-jamming capability, many users have become reliable products, and his operation is relatively simple. This paper introduces the design of hardware and Siemens S7-200smart Smart700IE 7-inch touch screen. PLC is a computer numeric control type, he used a programmable memory to store instructions, with order, logic, counting, timing and some other functions. Via analog input, output, and digital input and output components, control procedures and equipment.Keywords: PLC temperature control PID Touch screen目录1 引言 (1)1.1 应用背景 (1)1.2 温度控制的技术现状 (1)1.3 设计方案 (3)2 硬件系统设计 (5)2.1 西门子smart200 (5)2.2 触摸屏 (6)2.3 温度传感器 (8)2.4 模拟量模块 (9)3 软件系统设计与调试 (11)3.1 PID基本机理 (11)3.2 系统程序流程 (14)3.3 软件设计 (18)3.4温度的控制界面及调试分析 (19)结论 (24)致谢 (25)参考文献 (26)1 引言1.1 应用背景据我们所了解,温度作为工业中重要的参数,基本所有的物理变化或者化学反应都和温度有所关联。
西门子PID控制原理总结
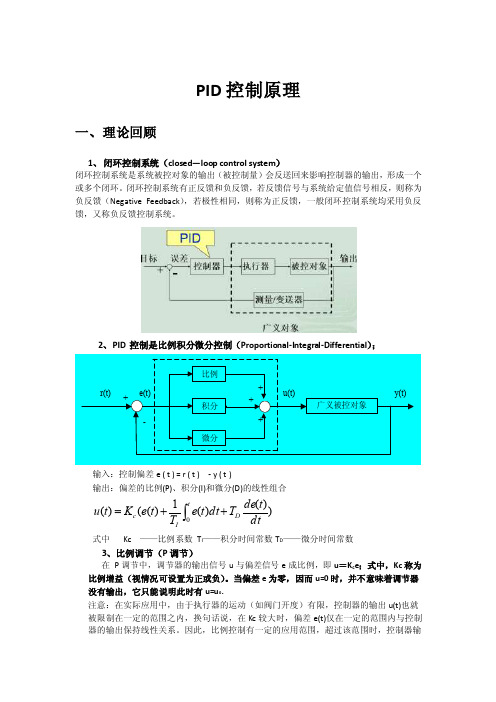
PID 控制原理一、 理论回顾1、 闭环控制系统(closed —loop control system )闭环控制系统是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈(Negative Feedback ),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
2、PID 控制是比例积分微分控制(Proportional-Integral-Differential );输入:控制偏差e ( t ) = r ( t ) - y ( t )输出:偏差的比例(P)、积分(I)和微分(D)的线性组合式中 Kc ——比例系数 T I ——积分时间常数T D ——微分时间常数3、比例调节(P 调节)在 P 调节中,调节器的输出信号u 与偏差信号e 成比例,即u =K c e ;式中,Kc 称为比例增益(视情况可设置为正或负)。
当偏差e 为零,因而u=0时,并不意味着调节器没有输出,它只能说明此时有u=u 0.注意:在实际应用中,由于执行器的运动(如阀门开度)有限,控制器的输出u(t)也就被限制在一定的范围之内,换句话说,在Kc 较大时,偏差e(t)仅在一定的范围内与控制器的输出保持线性关系。
因此,比例控制有一定的应用范围,超过该范围时,控制器输))()(1)(()(0dt t de T dt t e T t e K t u D tIc ++=⎰出与输入之间不成比例关系。
3.1、比例控制的特点○1、P 调节对偏差信号能做出及时反应,没有丝毫的滞后。
○2、比例调节的显著特点就是有差调节。
如果采用比例调节,则在负荷扰动下的调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差。
因为根据比例调节的特点,只有调节器的输入有变化,即被调量和设定值之间有偏差,调节器的输出才会发生变化。
PID温度控制的PLC程序设计

PID温度控制的PLC程序设计PID(比例-积分-微分)温度控制是一种常用的控制方法,可以通过PLC(可编程逻辑控制器)实现。
本文将详细介绍PID温度控制的PLC程序设计过程。
1.确定控制系统需求:首先要确定所需的控制系统的基本要求,包括控制温度范围、精度要求、控制方式等。
2.确定传感器和执行机构:选择合适的温度传感器和执行机构,例如热电偶或热电阻作为温度传感器,控制阀门或加热器作为执行机构。
3.确定控制算法:PID控制算法是一种经典的温度控制方法,可在PLC中实现。
PID控制算法由比例、积分和微分三个参数组成,可以通过自整定或手动调整获得最佳参数值。
4.确定控制模式:根据实际需求,选择合适的控制模式,比如开环控制、闭环控制或自适应控制。
对于温度控制,一般采用闭环控制。
5. PLC软件设计:根据控制系统需求和算法确定的参数,设计PLC 软件。
PLC软件可以使用Ladder Diagram(梯形图)或Function Block Diagram(功能块图)等语言编程。
下面是一个基本的PID温度控制的PLC程序设计示例(以Ladder Diagram为例):```ladder====主程序====-,----[]----[]----[]----()PID----[]----]----[]----[]----,[]----温度输入设置温度温度差系数K----[+]=--------]--------]-----------温度设定温度差积分控制值----[/K]------]--------------------------[]----------------[+]=---------控制值累计量----[]----[]----[]----()KpKiKd```上述Ladder Diagram中,PID控制算法的三个参数Kp、Ki和Kd通过输入设置,通过调整这些参数可以改善控制系统的响应速度和稳定性。
基于PID算法的温度控制系统设计
基于PID算法的温度控制系统设计随着科技的不断发展,温度控制系统得到了广泛的应用。
无论是工业制造还是家庭生活,都会用到温度控制系统。
在这个系统中,PID算法是最常用的控制算法之一。
本文将介绍基于PID算法的温度控制系统的设计。
一、系统概述温度控制系统可以用于控制温度控制在一定范围内。
该系统包括一个温度传感器、一个控制器、一个执行器和一个热源。
其中,温度传感器用于将温度信号转换成电信号,控制器用于处理电信号,执行器用于控制热源加热或停止加热。
在温度控制系统中,PID算法是控制器中使用的一种算法。
二、PID算法原理PID控制算法分别根据偏差、积分错误和微分错误来控制系统。
PID算法控制器包括控制模块、时间模块、输出模块、PID模块和作用模块。
该算法可以通过增大或减少控制器的输出来控制系统的状态,以便实现温度控制。
模型中包含比例项、积分项和微分项。
控制器采用增益因子对其中的每一个部分进行调整,以便更好地控制系统。
三、系统设计在设计基于PID算法的温度控制系统时,需要首先将传感器连接到控制器。
控制器可以收集从温度传感器中收集的温度信号并将其转换成电信号。
然后,该信号将被发送到PID算法控制器,该控制器可以使用PID算法来计算输出信号。
输出信号可以通过执行器来控制加热或停止加热的热源,从而实现温度控制。
四、系统的优点基于PID算法的温度控制系统可以实现更准确和更稳定的温度控制。
相对于其他控制算法来说,该算法具有更优秀的响应特性和更敏感的响应速度。
此外,该算法可以进行现场校准,更容易进行二次开发。
五、系统的应用基于PID算法的温度控制系统广泛应用于各个领域。
在工业制造领域,该系统可以用于控制各种设备和工具的温度,以保证生产质量。
在医疗领域,该系统可以用于监控体温,并确保患者在治疗过程中保持稳定的体温。
此外,在家庭生活中,基于PID算法的温度控制系统可以帮助人们更好地控制室内温度,从而提高生活舒适度。
总之,基于PID算法的温度控制系统可以广泛应用于各种领域。
工业控制中PID控制器的优化设计与应用
工业控制中PID控制器的优化设计与应用1.前言对于正在进行工业生产和控制的相关企业而言,控制系统的稳定性与准确性是非常重要的,良好的控制性能能够帮助企业提升生产效率和产品品质,同时节约能源、减少成本。
PID控制器在众多控制器中应用较广泛,在系统工程中的应用也非常广泛。
本文将会从PID控制器的基本原理、PID控制器的优化设计和PID 控制器的应用领域三个方面来进行详细的介绍和讲解。
2.PID控制器的基本原理PID控制器建立在控制器的反馈闭环的基础上,其作用是根据被控对象的反馈信号和设定值之间的误差来控制被控量的变化。
PID控制器主要由三个部分组成:比例环节、积分环节和微分环节。
2.1比例环节比例环节的作用是根据被控量与设定值之间的误差来确定控制量的大小。
比例环节所计算出的控制量与误差成正比例关系,比例系数用Kp表示。
比例环节所计算出的控制量中会受到噪声的影响,如果比例系数取得过大,将会导致振荡。
2.2积分环节积分环节的作用是对比例环节控制量的累计误差进行积分处理。
积分环节所计算出的控制量与误差的累积值成正比例关系,系数用Ki表示。
积分环节能够使被控量有一个稳定的偏移值,对于系统的稳定性和响应速度的提升有很大的帮助。
但是如果累积误差过大,积分环节会导致系统产生超调。
2.3微分环节微分环节的作用是对比例环节控制量的变化率进行微分处理。
微分环节所计算出的控制量与误差的变化量成正比例关系,系数用Kd表示。
微分环节能够根据被控量的变化率来提高控制精度,同时避免系统产生超调。
但是如果微分系数取得过大,也会导致系统振荡。
3.PID控制器的优化设计PID控制器的优化设计包括参数的调节和控制结构的选择,主要目的是提升系统控制性能、提高控制精度、避免系统振荡和超调等问题。
3.1参数的调节调节PID控制器各个环节的参数,包括比例系数Kp、积分系数Ki、微分系数Kd。
经验表明,Kp的值越大,控制器响应速度越快,但容易产生振荡;Ki的值越大,稳定性越好,但容易产生超调;Kd的值越大,控制器对噪声和干扰的抑制能力越强,但容易产生震荡。
PID控制器的基本原理与应用
PID控制器的基本原理与应用PID 控制器是一种经典的反馈控制器,广泛应用于工业自动化领域。
本文将介绍 PID 控制器的基本原理、工作原理和常见的应用案例。
一、基本原理PID 控制器的名称由三个控制参数组成,分别是比例(P)、积分(I)和微分(D)。
比例控制依据误差信号与给定值之间的差异,以一定比例调整控制输出。
比例控制器可快速响应系统变化,但容易导致超调和震荡。
积分控制器根据误差信号的累积量来调整控制输出。
积分控制器有助于消除稳态误差,但也会导致响应时间延长和系统不稳定。
微分控制器根据误差信号变化率来调整控制输出。
微分控制器可以提高系统的动态响应和稳定性,但对噪声敏感。
PID 控制器通过加权和三个控制参数的组合来计算控制输出。
PID控制器的数学表达式为:输出 = Kp * 偏差 + Ki * 积分偏差 + Kd * 导数偏差其中,Kp、Ki 和 Kd 分别为比例、积分和微分参数,偏差为给定值与实际值之间的差异,积分偏差为过去偏差的累积量,导数偏差为当前偏差的变化率。
二、应用案例1. 温度控制PID 控制器广泛应用于温度控制系统中。
以恒温箱为例,PID 控制器通过检测箱内温度与设定温度的偏差,调节加热器或制冷器的输出功率,使温度稳定在设定值附近。
2. 位置控制在机器人或自动化生产线中,PID 控制器可用于位置控制。
通过检测目标位置与实际位置之间的偏差,PID 控制器可以控制电机的转速和方向,使机器人或生产线准确移动到目标位置。
3. 流量控制PID 控制器也可用于流量控制。
例如,在化工过程中,PID 控制器可以根据设定的流量需求,调整阀门的开度来控制流体的流量。
4. 电压调节在电力系统中,PID 控制器可用于电压调节。
当负载变化时,PID 控制器可以通过调整发电机的功率输出来保持系统电压稳定。
以上仅为 PID 控制器的一些常见应用案例,实际应用中还可以根据不同的控制需求进行调整和优化。
结语:PID 控制器是一种简单而强大的控制器,具有广泛的应用。
西门子工艺指令(2)——PID控制1
西门子工艺指令(2)——PID控制1STEP 7 为 S7-1200 CPU 提供以下 PID 指令:● PID_Compact 指令用于通过连续输入变量和输出变量控制工艺过程。
● PID_3Step指令用于控制电机驱动的设备,如需要通过离散信号实现打开和关闭动作的阀门。
● PID_Temp 指令提供一个通用的PID 控制器,可用于处理温度控制的特定需求。
全部三个 PID 指令(PID_Compact、PID_3Step 和 PID_Temp)都可以计算启动期间的P 分量、I 分量以及D 分量(如果组态为“预调节”)。
还可以将指令组态为“精确调节”,从而可对参数进行优化。
用户无需手动确定参数。
PID 算法的采样时间表示两次输出值(控制值)计算之间的时间。
在自调节期间计算输出值,并取整为循环时间的倍数。
每次调用时都会执行 PID指令的所有其它函数。
PID 算法PID(比例/积分/微分)控制器会测量两次调用之间的时间间隔并评估监视采样时间的结果。
每次进行模式切换时以及初始启动期间都会生成采样时间的平均值。
该值用作监视功能的参考并用于计算。
监视包括两次调用之间的当前测量时间和定义的控制器采样时间的平均值。
PID 控制器的输出值由三个分量组成:● P(比例):如果通过“P”分量计算,则输出值与设定值和过程值(输入值)之差成比例。
● I(积分):如果通过“I”分量计算,则输出值与设定值和过程值(输入值)之差的持续时间成比例增加,以最终校正该差值。
● D(微分):如果通过“D”分量计算,输出值与设定值和过程值(输入值)之差的变化率成函数关系,并随该差值的变化加快而增大。
从而根据设定值尽快矫正输出值。
PID 控制器使用以下公式来计算 PID_Compact 指令的输出值。
插入 PID 指令和工艺对象:STEP 7 提供了两个 PID 控制指令:● PID_Compact 指令及其相关工艺对象提供具有调节功能的通用PID 控制器。