固定式配时车辆延误与排队长度计算模型研究(硕士论文)200905
城市道路信控交叉口车辆延误分析与治理对策
第 30 卷
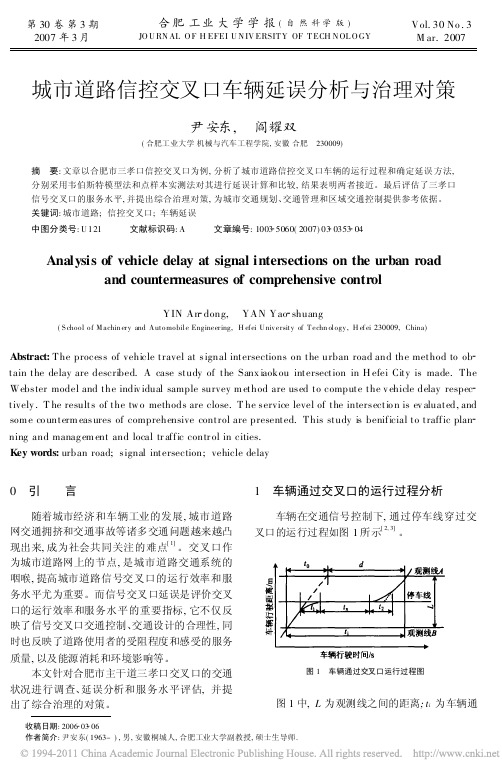
过距离 L 所需的行驶时间 ; t0 为车辆不受信号控 制影响时以正常行驶速度行驶所需的行驶时间; d 为车辆通过距离 L 的总延误时间; t 1 为受阻车辆 减速延误时间; t2 为受阻车辆启动加速延误时间; ts 为机动车辆停车延误时间 ; A 、 B 为观测线。 通常进入交叉口的车辆, 由于受到交通信号 灯的作用 , 往往要改变行车状态。在红灯期间到 达的车辆 , 必须在达到停车线之前 制动减速、 停 车, 待绿灯亮后重新启动加速 , 通过交叉口 , 这种 行车过程为完全停车。若在绿灯期 间到达的车 辆, 由于前面有排队机动车辆 , 根据跟驰原则 , 往 往要减速 , 然后再加速通过交叉口 , 这种行车过程 成为不完全停车。若在绿灯后期到达的车辆 , 由 于前面没有排队车辆 , 可以不停车顺利通过交叉 口。因此 , 完全停车和不完全停车都要造成车辆 运行时间的损失 , 从而产生延误。
表3 入口引道 东入口 车道组流向 直行及右转 左转 西入口 直行及右转 左转 南入口 直行及右转 左转 北入口 直行及右转 左转
三孝口信控交叉口延误计算结果表 ( 韦伯斯特模型法 ) 交通流量 /(辆 h- 1 ) 周期 /s 154 154 154 154 154 154 154 154 0. 182 0. 338 0. 182 0. 338 0. 260 0. 169 0. 260 0. 169 绿信比 饱和度 x 0. 620 0. 503 0. 636 0. 491 0. 555 0. 527 0. 603 0. 552 车道组 延误 / s 58. 187 52. 769 323 651 311 812 167 882 175 42. 117 58. 420 53. 038 41. 796 52. 258 49. 463 51. 318 60. 339 50. 198 51. 956 60. 816 入口引道 延误 / s 交叉口 延误 / s
[工学]交通流理论
![[工学]交通流理论](https://img.taocdn.com/s3/m/8ef2b977b9d528ea80c779a9.png)
且有:∑fi =N,∑Fi =N
3、确定统计量的临界值χ2a
χ2a值与置信水平α和自由度DF有关,α通常取0.05 。
DF=g-q-1,式中,q为约束数,指原假设中需确定的未知数的个 数,对泊松分布q=1(只有m需确定),对二项分布和负二项分布 q=2(需确定P、n两个参数)。
N1=λ·P(h≥a1)= λe-λa1 主要道路车流中车头时距大于a2的数目:N2= λe-λa2
…… 则,主要道路车流中允许一辆车穿过的车头间隔数目为:N1-N2
主要道路车流中允许二辆车穿过的车头间隔数目为:N2-N3 主要道路车流中允许三辆车穿过的车头间隔数目为:N3N4
……
15
∴到达率为λ的车流允许穿越的车辆数总和为: Q次=1(N1-N2)+2(N2-N3)+3(N3-N4)+… =N1+N2+N3+N4+…=λ[e-λa1 + e-λa2 + e-λa3 +…] =λ[e-λa + e-λ(a+a0) + e-λ(a+2a0) +…]
P(h≥t) =e-λ(t-τ) t≥τ 其概率密度函数为: λe-λ(t-τ) t≥τ
P(t) =
0
t<τ
1
1
移位负指数分布的均值M= +τ ,方差D= 2
用样本的均值(平均车头时距)m和方差S2代替M、D,即可求
得λ和τ。
17
2、适用条件 用于描述不能超车的单列车流和车流量低的车流的车头时距分布。 3、移位负指数分布的局限性
2
第一节 离散型概率统计模型
我们在观测交通量或车辆的车头时距时,会发现在固定的计 数时间间隔内,每个间隔内查到的车辆数是变化的,所观测到 的连续车头时距也是不同的,这说明车辆的到达是有一定随即 性的,为了描述这种随机性而采用的概率统计方法可分为两种: 离散型和连续型。
交通流理论-排队论模型、跟弛模型与交通波模型

交通流中的密度波
• 车流遭遇到瓶颈时,会产生一个相反方向的波, 类似于声波碰到障碍物时的反射,或者水受阻时的后涌
• 当容量降低,车辆会减速乃至排队,集结成高密度的队列 当容量增加,排队车辆陆续启动,疏散成适当密度的车队
• 在车辆集结疏散的过程中,车流中两种不同密度的分界面 通过一辆辆车传播的现象,可以用密度波来描述
8辆车的车队 在不同C值时的车头时距
20
5.4 跟驰理论
4.应用 概述
跟车特性
基本原理 应用
➢提供车头间距、相对速度等 信息,帮助驾驶员跟随车辆, 防止追尾事故的发生 ➢分析公共汽车单车道流量预 测小型汽车对市内交通的影响 ➢通过模拟车队的跟驰状态, 研究车辆跟驰运行中的安全性
21
统计分布特征
本
Reuschel, Pipes
跟驰车辆的加速度与 两车速度差成比例
Chandler, Herman, Kometani and Sasaki
Gazis, Herman (跟驰模型一般形式)
m, l 的不同取值对应着不同的密度-速度关系模型
m=0, l=2, Greenshield;
m=0, l=1, Grenberg
《交通工程学》
第五章 交通流理论
1
统计分布特征
本
排队论及其运用
章
主 要
跟驰理论
内
容
交通波理论
可插车间隙理论
2
5.3 排队论及其应用
1.概 述
概述 基本原理
排队论也称随机服务系统理论,是 运筹学的重要内容之一。主要研究 “服务”与“需求” 关系的一种 以概 率论为基础的数学理论。
应用
需求
服务
城市道路落客区车辆延误模型

城市道路落客区车辆延误模型
张立帆;焦朋朋;司铭锴
【期刊名称】《系统仿真学报》
【年(卷),期】2020(32)9
【摘要】提出一种城市道路落客区车辆延误的计算模型。
分析了独立落客区和路段落客区的交通组织模式。
将"排队落客"模式的落客过程分为2个阶段,结合排队论和可插车间隙理论,建立了落客车辆的延误模型,并设计了优化算法。
随后以北京市安贞医院入口路段为测试对象,应用VISSIM仿真软件和实际调查的数据对模型进行验证。
分析了落客率和落客区长度对落客车辆延误的影响。
结果表明,模型能够精准的获取落客车辆的延误,同时可以为落客区的合理设置提供依据。
【总页数】8页(P1839-1846)
【作者】张立帆;焦朋朋;司铭锴
【作者单位】北京建筑大学北京未来城市设计高精尖创新中心;北京市市政工程设计研究总院有限公司第一设计研究所
【正文语种】中文
【中图分类】U491.2
【相关文献】
1.挖掘道路潜力减少市中心区部分公交车辆、出租车辆因停靠上下客对道路交通的影响
2.城市道路环形交叉口车辆排队及行车延误研究
3.城市道路信控交叉口车辆
延误分析与治理对策4.基于设置直行待行区的信号交叉口车辆延误研究5.城市道路信控交叉口车辆延误分析与治理对策
因版权原因,仅展示原文概要,查看原文内容请购买。
交叉口延误计算公式

交叉口延误计算公式
交叉口延误计算公式是交通工程领域常用的一种计算方法。
它通过分析交叉口的车辆流量、车速、红绿灯周期等因素,计算出交叉口的延误时间,从而评估交叉口的运行效率。
下面介绍一下交叉口延误计算公式的基本原理和应用方法。
交叉口延误计算公式的基本原理是根据车辆通过交叉口的实际
情况,估算出车辆在交叉口内停留的时间,然后将所有车辆的停留时间累加起来,就得到了交叉口的总延误时间。
具体计算方法如下:延误时间 = (车辆数×车辆平均停留时间) / 3600
其中,车辆平均停留时间是指车辆在交叉口内等待和通过的平均时间,可以通过以下公式计算:
车辆平均停留时间 = (交叉口长度÷车速) + (红灯时间×
车辆通过率)
交叉口长度是指交叉口两端道路的距离,车速是指车辆通过交叉口的平均速度,红灯时间是指交叉口红灯的时间,车辆通过率是指通过交叉口的车辆数量与通过交叉口的总车流量之比。
交叉口延误计算公式的应用方法是先测量交叉口的长度和车流量,然后根据实际情况估算出车速和红绿灯周期,最后使用上述公式计算交叉口的延误时间。
通过对不同交叉口的延误时间进行比较,可以评估交叉口的运行效率,并提出改进措施。
总之,交叉口延误计算公式是交通工程领域非常重要的计算方法,可以帮助交通工程师评估交叉口的运行效率并提出改进措施,从而提
高城市交通的整体运行效率。
交通系统分析复习题答案

1.交通流特性:是指交通流运行状态的定性、定量特征。
2.延误:是指行驶在路段上的车辆由于受到道路环境、交通管理与控制及其他车辆的干扰等因素的影响而损失的时间。
3.平均饱和排队车辆数:Q0即在整个计算时间内由于个别周期过饱和以致绿灯时间结束时仍然滞留在停车前后的车辆数。
4.交通需求:是指在社会经济发展过程中对客、货流通的客观要求。
是社会经济生活中人和货物对空间位置的需求,是任何经济社会活动赖以存在的基础。
5.交通需求量:是指在特定的时间、空间条件下,社会经济生活在客货运空间位移方面的需求大小。
6.交通供给:是指在一定时期内,在一定的价格水平上,交通运输生产者愿意而且能够提供的交通服务数量。
7.跟驰理论:是运用动力学方法研究在限制超车的单行道上,行驶车队中前车速度的变化引起的后车反应。
8.车队离散:车队从上游交叉口停车前驶出后,由于其中所包含的车辆行驶速度存在差异,在到达下游交叉口停车线之前,便渐渐拉开距离,即发生车队“离散现象”。
9.交通分析过程:交通子系统界定、发现问题、寻找根源、给出答案。
10.交通需求影响音速:城市路网结构、交通政策、交通结构。
11.交通系统分析意义:为交通规划提供依据、为交通设施设计及改造提供依据、为交通管理提供依据、为交通政策和法规的制订提供依据。
12.系统优化方法:逻辑判断法、数学优化法、智能优化法。
13.交叉口的延误模型:均衡延误和随机延误。
14.车辆在信号交叉口的延误时间和排队长度:主要取决于车辆的到达率和交叉口的通行能力。
15.稳态延误模型建立了如下的基本假定:(1)信号配时为固定式配时,且初始时刻排队长度为零。
(2)车辆平均到达率在所取的时间段内是稳定不变的。
(3)车辆受信号阻滞所产生的延误时间与车辆到达率的相关关系在所取的整个时间段内不变。
(4)交叉口进口断面的通行能力在所研究时间内为常数,且到达率不能超过信号通行能力。
(5)在时间段T内,车辆到达和离去平衡。
过饱和交通状态下的停车延误协调控制模型_卢凯
1 引 言 (Introduction)
与绿波协调控制方式相比, 停车延误协调控制是 以停车次数与延误时间加权和最小作为控制目标的 一种区域交通效益整体优化控制方式, 可满足各种 交通状态下的干道或区域协调控制需要, 且易于进 行交通效益分析评价, 是交通信号协调控制的一个 主要研究方向. 但现有的交通信号协调控制理论方 法与典型交通信号控制系统如TRANSYT, SCATS, SCOOT等, 多适用于未饱和交通状态下的信号协调 控制问题, 对于缓解城市CBD地区与部分道路在过 饱和状态下产生的交通拥堵则显得力不从心. 与未 饱和交通状态相比, 过饱和交通状态下的停车延误 协调控制问题将更为复杂多变, 因此对于过饱和状
态下的停车延误协调控制研究具有十分重要的理论 意义和应用价值. Gazis与Dans等[1∼3] 提出以进口道排队长度作为 状态变量, 根据停车断面车辆到达驶离关系建立过 饱和交通状况下的状态方程, 利用最优控制理论中 的极值原理进行延误最优控制求解; 并将应用范围 进一步扩展到具有普遍意义的路网, 采用类似方法 建立了相应的动态信号优化控制模型, 通过时间离 散化处理将其转化为多个线性规划问题进行优化求 解. Michalopoulos等[4] 在Gazis的研究基础上, 通过 进一步考虑路段排队长度约束、 路段行程时间与交 叉口转弯车流比例等因素的作用影响, 提出了路段 排队约束条件下的相邻过饱和交叉口最小延误协调
控制策略, 给出了信号周期与绿信比的优化设置方 法. Chang等[5,6] 针对整个过饱和状态持续时间段, 建 立了不同信号相位控制方式下的单交叉口离散优化 模型, 利用最优控制理论中的离散系统极小值原理, 得到了离散优化模型的最优控制率, 并给出了最佳 信号周期与最佳绿信比的实现算法; 通过利用离散 优化模型预测过饱和交叉口的整体性能指标、 确定 过饱和区域内的关键交叉口、 以关键交叉口作为起 点寻找协调路径方向与协调配时参数, 实现了一种 过饱和区域的信号协调实时优化控制. Rouphail与 Fambro等[7,8] 提出利用车辆均匀到达均衡延误模型 与协调调整系数PF估算车辆非均匀到达时的均衡 延误时间, 针对一种车辆均匀到达类型与五种车 辆非均匀(车队)到达类型, 分析推导了协调调整系 数PF的计算公式与取值范围, 并为TRB[9] 出版的美 国《道路通行能力手册》所用. Benekohal等[10,11] 针 对行驶车队与非行驶车队到达下游交叉口时车辆平 均到达率的不同, 提出利用AB(arrival-based)法直接 推导各种车辆到达类型下的延误时间计算公式, 并 建立了涵盖所有可能到达类型的11种信号交叉口均 衡延误模型, 实现了多段到达率不同到达类型下的 协调信号交叉口均衡延误精确计算. 常云涛等[12] 利 用Robertson建立的行驶车流离散模型, 对行驶车流 在协调控制系统内各交叉口的到达驶离图式进行了 分析研究, 提出了一种基于遗传算法的城市干道协 调控制相位差优化设计方法. 刘广萍等[13] 针对非饱 和与过饱和两种不同交通状况, 分析了交叉口延误 与信号配时、 车辆到达率等参数之间的动态关系, 研 究了信号控制下交叉口延误时间的计算方法. 事实上, 在过饱和状态与协调控制作用下, 下游 交叉口进口道到达车流的随机波动性将明显减弱, 随机停车延误也显著减少. 但现有相关研究成果多 为过饱和状态下的单交叉口延误模型与未饱和状 态下的多交叉口延误模型, 对于信号协调控制方式 下处于过饱和状态的均衡相位停车延误模型研究甚 少, 且研究时段多局限于单个信号周期之内. 因此, 本文将通过分析研究整个过饱和作用时间段内行驶 车队在下游信号控制交叉口的停车延误, 建立起一 套过饱和交通状态下的停车延误协调控制模型.
信号交叉口延误_通行能力联合优化配时方法研究
其总延误 D 的计算公式如下 :
D =
若使总延误最小 ,则 d ( D) Π d C = 0 , 用近似解 法 ,其最佳周期时长 :
1. 5 L + 5 C0 = 1 - Y ( 3)
6
饱和度为 1. 从交通控制的可靠性因素考虑 , 这显 然是不合适的 . 理论上的简要推导过程如下 . 各相位的绿信比按下式计算 : λ i =
3
通讯作者 :ylchang @ujs. edu. cn
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
第1期
信号交叉口延误 — 通行能力联合优化配时方法研究
6
s ・y imax ・ L 2 Y ・C
(13)
将式 ( 10) 代入式 ( 9) 可得 Ximax = 1. 可见 ,上海方法推荐的配时公式为最短周期公 式 ,由于交通流的随机性 , 必然使饱和度为 1 的流 向出现等待二次绿灯现象 , 增大车辆延误 , 降低服 务水平 ,并非最佳周期公式 . 综上所述 ,现有两种配时理论与方法都具有一 定的局限性 , 无法很好地指导实践工作 . 而且 , 上 述两种配时方法都是对延误和通行能力两个重要 指标的其一进行优化 ,难免顾此失彼 .
系统工程理论与方法
信号交叉口延误 — 通行能力联合优化 配时方法研究
张 鹏 ,常玉林
3
( 江苏大学 汽车与交通工程学院 , 江苏 镇江 212013)
摘要 : 分析了 F2B 配时方法延误计算模型的缺陷 . 证明了上海配时方法的结果是各 个相位的饱和度为 1. 建立了延误 - 通行能力联合优化配时模型 ,以延误与通行能力之 比最小为优化目标 . 应用分析表明 : F2B 配时方法使车均延误比现状减少了 1. 65s ; 上海 配时方法使车均延误减少了 8. 15s ,但通行能力降低了 422pcuΠ h ; 联合优化配时法使车 均延误减少了 9. 46s ,通行能力保持了现状水平 . 关键词 : 交通控制 ; 信号交叉口 ; 配时 ; 延误 ; 通行能力 中图分类号 : U491. 51 文献标志码 : A
(完整版)DTA动态交通分配
(2005) 西安交通大学对具有排队的多模式动态交通分配问题及其相关应用进行研究。
本文对动态交通分配模型发展进行了介绍和总结,并详细讨论了模型中的路段动态函数、流量传播约束、FIFO等相关特性。
将单一交通模式的点排队路段动态模型扩展到多模式动态路段模型,并且证明了各种模式的路段行程时间函数合乎模式内的FIFO特性,以及在拥挤情况下各模式车辆的速度收敛特性。
将多模式随机动态同时的路径与出发时间选择平衡条件描述为变分不等式问题,提出了两个不同的算法用于求解变分不等式问题:算法一是基于路段的算法,这个算法给出了基于logit的同时的路径与出发时间选择的随机动态网络配载方法,并证明了这个方法的正确性;算法二是基于路径的启发式算法。
仿真试验验证了模型以及两个算法的有效性。
提出了多模式多用户动态交通分配模型,用于评估ATIS对不同模式出行者和交通系统的影响。
将每一模式的出行者分为两类:一类是装配ATIS的出行者,另一类是未装配ATIS的出行者。
由于所能获得的交通信息质量的差异,他们将遵循不同的动态用户平衡条件。
同时,每一种模式出行者在选择路径和出发时间时,不但考虑出行费用和进度延误费用的影响,而且还考虑油耗费用的影响。
将多模式多用户动态用户平衡条件描述为统一的变分不等式问题,利用对角化算法计算相应的平衡流量状态,并通过仿真试验验证了模型与算法的有效性。
使用nested-logit模型模拟ATIS的市场渗透率与服从率,模型的上层模拟了驾驶小汽车出行者的购买行为(市场渗透率),底层主要描述了装配ATIS设备的小汽车出行者的服从行为(服从率)。
设计了固定点算法计算ATIS的平衡市场渗透率与服从率。
并在简单的路网上进行了仿真研究,结果证明算法与模型是正确和有效的。
提出了组合模式动态交通分配模型,模型中假设有两类出行者:一类是纯模式出行者,他们自己驾驶小汽车完成一次出行。
另一类是组合模式出行者,在其一次出行的第一部分是自己驾驶小汽车完成的,剩余部分是乘公交车完成的。
(管理科学与工程专业论文)车辆跟驰模型参数标定与验证研究
车辆跟驰模型参数标定与验证研究摘 要微观交通仿真系统越来越广泛地被用于交通工程、交通规划领域,其前提是使用的各种交通模型得到充分的标定与验证。
本文对微观交通仿真系统中的核心模型——车辆跟驰模型的参数标定与验证作了研究,主要包括如下研究内容:1)首先研究了微观交通仿真国内外现状,各种车辆跟驰模型的原理,选取GM类车辆跟驰模型作为待标定与验证的车辆跟驰模型,进一步研究了此类模型中最重要的参数之一——驾驶员反应时间的标定方法;2)选取大部分车辆处于跟驰状态的微观交通流数据,分析其各种交通流特性:交通流量、平均车速、车流密度、车头时距等,为车辆跟驰模型参数标定与仿真验证工作做好数据准备;3)使用互相关分析法,最小二乘法,相对速度与加速度对比图法标定GM类车辆跟驰模型最重要的参数之一反应时间,对反应时间做出统计描述,并从反应时间这个角度分析驾驶员特性;比较这三种标定方法的不同;4)从驾驶员认知角度分析车辆跟驰过程中跟驰行为的影响因素,进一步利用定量分析法——因子分析法分析车辆跟驰过程中跟驰行为的主要影响因素,基于主要影响因素,选取合适的GM类车辆跟驰模型,标定除反应时间之外的其它参数;5)以分布式并行仿真系统TPSS为平台,集成标定好的车辆跟驰模型,运用仿真验证方法,验证参数标定结果的有效性。
本文利用互相关分析法,最小二乘法,相对速度与加速度对比图法标定了驾驶员反应时间,得到此参数的均值,标准差等统计描述,发现互相关分析法的计算结果与以往的研究具有较大的差异,最小二乘法,相对速度与加速度对比图法的计算结果与以往的研究一致。
对车辆跟驰模型中反应时间之外的参数的标定,得到了两组分别适合于车辆加速时与车辆减速时的参数值。
将标定好的车辆跟驰模型集成到分布式并行仿真系统TPSS中仿真验证表明,仿真结果达到了预先设定的仿真模型验证标准。
关键词:微观交通仿真,GM类车辆跟驰模型,分布式并行仿真系统,标定,验证,反应时间Research on Parameters Calibration and Verification ofCar-following ModelsABSTRACTTraffic micro-simulation systems have been widely used in the fields of transportation engineering and planning, and its premise is that all kinds of models in those traffic micro-simulation systems have been adequately calibrated and verified. In this thesis, some research is done on parameters calibration and verification of core models: car-following models of traffic micro-simulation systems, and the major contributes are as follows:1)Recent traffic micro-simulation research all over the world isdiscussed, and laws of many kinds of car-following models are introduced. Then GM-type car-following models are chosen as models which will be calibrated and verified later. The calibration ways of driver reaction time: one of the most important parameters in GM-type models are summarized.2)A set of Micro-traffic flow data in which most cars are in the car-following state is chosen, and many kinds of traffic characteristics such as flow, mean speed, density and time headway are analyzed.These characteristics are the base of the following calibration andverification.3)Driver reaction times are calibrated in the ways of cross-correlationanalysis, least squares method, and the relative speed and the acceleration spot, and statistic description of reaction times is obtained.From the viewpoint of reaction times, driver behavior is researched.Also, three calibration ways are compared.4) Factors which effect car-following behavior are analyzed from thepoint of drivers’ cognition, and factors analysis are done to these factors, then main factors influencing car-following behavior are grasped. Based on this, a kind of GM-type model is chosen, and other parameters except reaction time in this model are calibrated.5)TPSS is used as a simulation platform, and the model of whichparameters have been calibrated is integrated in TPSS, the simulation results are compared to the reality to verify the reliability of the calibration work.The mean values and standard deviations of react times are obtained using three ways. The results of cross-correlation analysis are different from the past research, and the results of other two ways are similar to the past research. Two sets of parameters values are acquired corresponding to accelerating state and decelerating state. Verification results satisfy the standard of traffic micro-simulation.Key Words: Traffic Micro-simulation, GM-type Car-following Models, Traffic Parallel Simulation System, Calibration, Verification, Reaction Time上海交通大学学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表 2—4 六条车道计算结果………………………………………………………17 表 4—1 起动波波速统计表………………………………………………………42 表 5—1 第一点至第二点的行驶速度分布拟合表………………………………53 表 5—2 第一点至第三点的行驶速度分布拟合表………………………………54 表 5—3 第一点至第四点的行驶速度分布拟合表………………………………54 表 5—4 间隔为 10 秒的流量分布拟合结果……………………………………56
图表目录
图 2—1 绿灯期间车流通过交叉口的流量图示…………………………………5 图 2—2 排队车辆释放的累计曲线图……………………………………………12 图 2—3a 车辆到达和驶离轨迹图…………………………………………………13 图 2—3b N (t ) 递增累计曲线………………………………………………………13 图 2—3c 利用累计曲线计算饱和流率和损失时间………………………………13 图 2—4 利用累计曲线法计算饱和流率和损失时间实例………………………16 图 3—1 受阻滞车辆的行驶时间—距离曲线……………………………………22 图 3—2 完全停车与不完全停车…………………………………………………23 图 3—3 排队长度与延误时间……………………………………………………27 图 3—4 过饱和信号周期中车辆的受阻情况……………………………………30 图 3—5 过渡函数曲线……………………………………………………………33 图 3—6 延误与饱和度的关系……………………………………………………33 图 4—1 两种密度的车流运行情况………………………………………………36 图 4—2 交通波的含义示意图……………………………………………………38 图 4—3 各种交通流状态下的交通波……………………………………………40 图 4—4 格林伯模型波速—密度变化曲线………………………………………45 图 5—1 车流量随时间变化图示…………………………………………………49 图 5—2 交通调查示意图…………………………………………………………53 图 5—3 自由大路路段 9:00 流量图示……………………………………………55 图 5—4 上游交叉口饱和状态时本交叉口车流到达图示………………………59 图 5—5 上游交叉口饱和状态时本交叉口车流到达图示的近似表示…………59 图 5—6 对应于图 5—5 的不同绿时差图示( G ≥ t 2 − t1 )……………………61
6.1 论文的主要进展…………………………………………………………68 6.2 研究工作展望……………………………………………………………69
II
固定式配时车辆延误与排队长度计算模型研究
参考文献……………………………………………………………………………70 致谢…………………………………………………………………………………72 摘要…………………………………………………………………………………Ⅰ ABSTRACT………………………………………………………………………Ⅳ
III
固定式配时车辆延误与排队长度计算模型研究
图 5—7 对应于图 5—5 的不同绿时差图示( G < t 2 − t1 )……………………63 图 5—8 上游交叉口非饱和状态时本交叉口车流到达图示……………………64 图 5—9 上游交叉口非饱和状态时本交叉口车流到达图示的近似表示………64 图 5—10 对应于图 5—9 的三种绿时差图示……………………………………66 表 2—1 长春市工农广场交叉口南湖大路由东向西直行车道的观测数据……14 表 2—2 车型转换系数表…………………………………………………………15 表 2—3
1
固定式配时车辆延误与排队长度计算模型研究
I
固定式配时车辆延误与排队长度计算模型研究
目
录
第一章 绪论………………………………………………………………………1
1.1 研究背景……………………………………………………………………1 1.2 项目来源……………………………………………………………………3 1.3 研究内容……………………………………………………………………3
论文分类号 密 级
U491.2 内部
单 位 代 码 研 究 生 学 号
10183 2200905
吉
硕 士
林
学
大
位
学
论 文
固定式配时车辆延误与排队长度计算模型研究 Research on Models of Delay and Queue Length at Fixed-time Signals
作者姓名 :杨少辉 专 业: 交通信息工程及控制
第四章 交通波理论实用模型探讨…………………………………………36
4.1 交通波基本理论…………………………………………………………36 4.1.1 4.1.2 4.2.1 4.2.2 4.2.3 交通波基本模型的建立…………………………………………36 交通波模型的应用条件及意义…………………………………37 传统模型…………………………………………………………40 模型验证…………………………………………………………41 模型修正…………………………………………………………43
导师姓名 及 职 称: 王殿海 教授
论文起止年月: 2002 年 3 月至 2003 年 3 月
固定式配时车辆延误与排队长度计算模型研究
提
要
本文是结合国家自然科学基金项目“模拟电路系统网络交通流特性研究”等 三个项目完成的。 论文研究了固定式配时控制下车辆延误和排队长度的计算模型, 对交通波理论进行了探讨和修正,并讨论了应用其进行车辆延误和排队长度计算 的可行性,构造了相应的理论模型。 全文共分六章。第一章介绍了本文的研究背景、研究意义和研究内容。第二 章分析了传统饱和流率测算方法的不足,介绍了累计曲线法,并用实际数据进行 了验证。第三章介绍了现有固定式配时控制效果评价理论,分析了其应用条件的 局限性。第四章介绍了交通波理论,发现传统的停车波模型和起动波模型与实际 偏差很大,论文根据交通流理论对其进行了修正,并初步分析了其在交通控制效 果评价中应用的可行性。第五章分析了车队离散现象和车队离散模型,依据课题 组调查数据提出了车队行驶时平均流量、平均速度和平均密度的确定方法,重点 讨论了利用交通波理论计算协调控制下车辆延误和排队长度的方法,建立了相应 的理论模型。第六章对全文进行总结,提出了需要进一步研究的问题。
IV
固定式配时车辆延误与排队长度计算模型研究
第一章 绪论
1.1 研究背景
随着国民经济的高速发展和城市化进程的加快,我国机动车拥有量及道路交 通量急剧增加。尤其是在大城市,交通拥挤以及由此导致的交通事故增加、环境 污染加剧,是我国城市面临的极其严重的“城市病”之一,已经成为国民经济进 一步发展的瓶颈。 交通拥挤的加剧,不仅会造成巨额的经济损失,而且,如果发展严重,甚至 还会导致城市功能的瘫痪。 交通拥挤的直接危害是交通延误增大, 行车速度降低; 低速行驶还将增加耗油量,导致燃料费用上升和汽车尾气排放量增大,从而导致 环境恶化。此外,交通拥挤使得交通事故增多,而交通事故的发生又使交通阻塞 加剧,形成恶性循环。 国内外的实践表明,解决城市交通问题的有效出路之一是对其进行科学的管 理和控制,而非单一地增加道路建设。实际上,道路建设的速度远远跟不上车辆 增长的速度,供和求很难达到平衡。为了解决城市交通拥挤问题,必须从供和求 两方面同时入手:一方面加快道路建设,改善现有道路设施,提高道路的通行能 力;另一方面要加强道路管理,限制交通需求无限制的增长。当城市发展到一定 规模以后,交通管理的作用就更加突出,西方发达国家现在解决城市交通问题的 重点,就在于加强城市交通管理。 就交通管理而言,一般分为静态管理和动态管理两大类:静态管理是指运用 交通法规、交通工程技术措施和交通安全教育对道路上的车辆、行人和道路使用 进行的管理;动态管理则是指交通控制,即采用交通信号控制设施,根据交通流 的变化特性来控制车辆和行人的通行。交通控制直接对道路交通流进行管理,特 别是对交叉口的管理,效果直接而且明显。因此,交通控制已经逐渐发展成为一 项专门的工程技术和一个专门的学科。国外出于城市交通控制的需要,依据多年 积累的交通控制理论,开发了一系列的交通控制系统,在世界各国得到了广泛应 用,例如英国的 TRANSYT 系统和 SCOOT 系统,澳大利亚 SCATS 系统,美国的
4.2 停车波和起动波模型……………………………………………………40
4.3 交通波理论的应用………………………………………………………46 4.4 小结………………………………………………………………………47
第五章
固定式协调控制车辆延误与排队长度计பைடு நூலகம்…………………48
5.1.1 5.1.2 5.2.1 5.2.2 5.3.1 5.3.2 5.3.3 正态分布函数——派西方法……………………………………49 几何分布函数——罗伯逊方法…………………………………50 车队平均行驶速度的确定………………………………………52 车队平均密度的确定……………………………………………55 应用交通波理论的可行性分析…………………………………58 上游交叉口车辆释放处于饱和状态……………………………58 上游交叉口车辆释放处于非饱和状态…………………………64
2.3 累计曲线法计算饱和流率和损失时间………………………………11
2.4 小结……………………………………………………………………18
第三章 孤立交叉口固定式配时车辆延误与排队长度计算…………19
3.1 信号交叉口的交通特性…………………………………………………19 3.1.1 3.1.2 3.2.1 通行能力与饱和度………………………………………………19 车辆在交叉口的受阻滞过程……………………………………21 稳态延误模型……………………………………………………25