eCognition中的分割与分类方法研究
eCognition8.9面向对象分类详细步骤
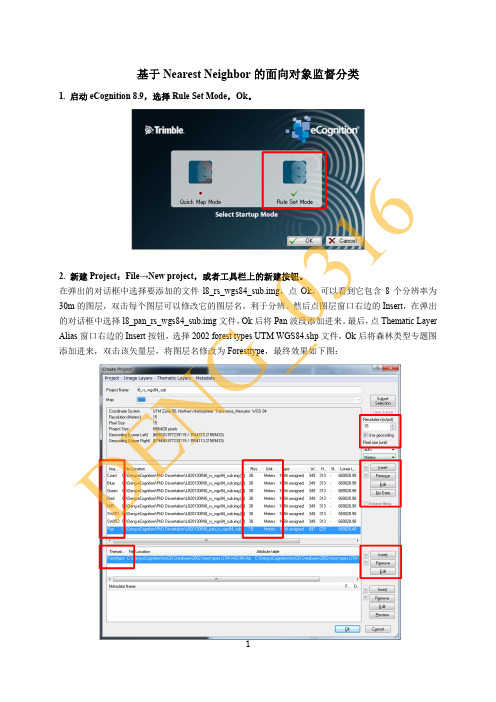
基于Nearest Neighbor 的面向对象监督分类1. 启动eCognition 8.9,选择Rule Set Mode ,Ok 。
2. 新建Project :File →New project ,或者工具栏上的新建按钮。
在弹出的对话框中选择要添加的文件l8_rs_wgs84_sub.img ,点Ok ,可以看到它包含8个分辨率为30m 的图层,双击每个图层可以修改它的图层名,利于分辨。
然后点图层窗口右边的Insert ,在弹出的对话框中选择l8_pan_rs_wgs84_sub.img 文件,Ok 后将Pan 波段添加进来。
最后,点Thematic Layer Alias 窗口右边的Insert 按钮,选择2002 forest types UTM WGS84.shp 文件,Ok 后将森林类型专题图添加进来,双击该矢量层,将图层名修改为Foresttype ,最终效果如下图:D E NG _0316Project Name 等按默认,点Ok ,回到主界面,图像按前3个波段RGB 显示,如下图:为了更好的辨别地物类型,点击工具栏上的图层显示编辑按钮,在弹出的对话框中点击修改RGB 为NIR ,Green ,Blue 显示:D E N G _0316如果取消勾选左下角No layer weights ,还可以设置不同波段的比重,在调整不同波段的比重时,在数值上左击鼠标增加比重,右击鼠标减少比重,如下图:点Ok 进行波段显示调整后的效果如下,然后保存这个Project 为l8_rs_wgs84_sub.dpr 。
D E N G _03163. 将图像分解为基本对象:首先,在Process Tree 窗口(如果没有,菜单栏View →Windows →Process Tree 调出),右击,选择Append New ,将Name 改为Segmentation ,其他按默认,然后点击Ok :其次,在Process Tree 窗口,右击Segmentation 这个新建规则(Rule),选Insert Child(插入子规则),Name 勾选自动,Algorithm 下拉菜单选择multiresolution segmentation (最常用的分割算法),在右边的参数窗口,找到Scale parameter 并将其设置为150,其他默认,然后点Execute(立即实行)或者Ok(稍后实行)。
eCognition Developer软件常用算法与特征.
智能影像分析专家eCognition Developer 软件常用算法与特征ReferenceBook 对 eCognition Developer 软件所有算法与特征都有较为详尽的说明,具体用法请参见 ReferenceBook 。
下面是一些常用算法与特征的说明, 以下截图均为 8.7.2版本下的截图。
一、常用算法1. 分割1多尺度分割 multiresolution segmentation多尺度影像分割从任一个像元开始 , 采用自下而上的区域合并方法形成对象。
小的对象可以经过若干步骤合并成大的对象 , 每一对象大小的调整都必须确保合并后对象的异质性小于给定的阈值。
因此 , 多尺度影像分割可以理解为一个局部优化过程 , 而异质性则是由对象的光谱 (spectral 和形状 (shape 差异确定的 , 形状的异质性则由其光滑度和紧凑度来衡量。
显然 , 设定了较大的分割尺度 , 则对应着较多的像元被合并 , 因而产生较大面积的对象。
多尺度分割2棋盘分割 chessboard segmentation棋盘分割是最简单的分割算法。
它把整幅或特定的影像对象裁剪成一个给定大小的相等正方形。
置各波重否使用矢尺度参数形状因子紧致度因子智能影像分析专家棋盘分割因为棋盘分割算法产生简单的正方形对象,所以它经常用来细分影像与影像对象。
3四叉树分割四叉树分割与棋盘分割类似,但是它要创建出不同大小的正方形。
您可以使用Scale Parameter 定义每个正方形内的颜色差异上限。
在裁剪出一个初始的正方形网格后,四叉树分割继续如下:如果不符合同质性标准, 那么把每个正方形裁剪成四个较小的正方形。
例如:正方形对象中最大的颜色差异要比定义的尺度值大。
重复以上过程直到在每个正方形中都符合同质性标准。
四叉树分割尺度参数是否使用矢量参与分割2. 分类1 assign Class 根据限制条件将对象分为指定类别,一次只能分一类。
eCognition的概论 1
eCognition的概论eCognition是北京天目创新科技有限公司代理的德国DefiniensImaging公司的遥感影像分析软件,它是人类大脑认知原理与计算机超级处理能力有机结合的产物,即计算机自动分类的速度+人工判读解译的精度,更智能,更精确,更高效地将对地观测遥感影像数据转化为空间地理信息。
eCognition突破了传统影像分类方法的局限性,提出了革命性的分类技术-面向对象分类。
eCognition分类针对的是对象而不是传统意义上的像素,充分利用了对象信息(色调,形状,纹理,层次),类间信息(与邻近对象,子对象,父对象的相关特征)。
eCognition基于Windows操作系统,界面友好简单。
与其他遥感,地理信息软件互操作性强,广泛应用于:自然资源和环境调查,农业,林业,土地利用,国防,管线管理,电信城市规划,制图,自然灾害监测,海岸带和海洋制图,地矿等方面。
面向影像对象:*面向像素的解算模式将像元孤立化分析,解译精度较低且斑点噪声难以消除;*利用影像分割技术把影像分解成具有一定相似特征的像元的集合—影像对象;*影像对象和像元相比,具有多元特征:颜色、大小、形状、匀质性等;基于对象属性特点:- 颜色信息丰富- 形状接近真实地物- 大小区分明显- 纹理信息突出- 上下文关系明确基于像素属性特点:- 基本上只以颜色信息来区分主要分类过程介绍:采用eCognition软件对影像进行分类操作非常简单,可以主要以三个步骤来形容如下:1.分割分割是面向对象分类的前提,多尺度分割是影像对象提取的专利技术,可以根据目标任务和所用影像数据的不同以任意选定的尺度分割出有意义的影像对象原型。
2.分类多尺度分割的结果是影像对象层次网络,每一层是一次分割的结果,影像对象层次网络在不同的尺度同时表征影像信息。
3.导出导出分类结果。
eCognition提供的专业分类工具包括* 多源数据融合* 多尺度分割* 基于样本的监督分类* 基于知识的模糊分类* 人工分类* 自动分类多源数据融合工具:可用来融合不同分辨率的对地观测影像数据和GIS数据,如Landsat,Spot,IRS,IKONOS, QuickBird,SAR,航空影像,LIDAR等,不同类型的影像数据和矢量数据同时参与分类。
Ecognition_提取水体

图3.7 由假彩色影像生成的运动场NDVI图注意到场地整体是健康的,除了一些有问题的点。
3.3利用eCognition对NDVI相机与普通相机拍摄的影像进行植被提取试验利用现有的影像,在eCognition中,对普通相机获取的影像,利用绿波段比值提取植被及非植被地区;同时,对改装后的NDVI相机拍摄的影像,利用ENDVI(增强归一化差异植被指数)提取植被及非植被地区。
对提取的结果进行对比分析。
(1)沙漠地区的植被注意到沙漠地区的植被的颜色与周围的沙子及岩石的颜色非常接近,用肉眼识别有一定难度。
图3.8普通数码相机影像及提取的植被区域提取方法:分割尺度为10;利用绿波段比值提取。
Green_Ratio = G / (R + B + G)提取结果:植被基本上能被提取出来,但是颜色与植被相近的岩石被错分入植被类。
图3.9 NDVI数码相机影像及提取的植被区域提取方法:分割尺度为10;利用增强归一化差异植被指数提取。
ENDVI = (R + G - 2 *B / (R + 2*B + G)提取结果:植被与岩石能较好区分,少许红色岩石被归入植被类,提取的植被效果较好。
(2)草坪图3.10普通数码相机影像及提取的非植被区域提取方法:分割尺度为10;利用绿波段比值提取。
Green_Ratio = G / (R + B + G)提取结果:图中显示的是提取的裸地及植被健康状况较差的地区,图中跑道、裸露的运动场、球门及树被提取出来。
但是在有草生长的区域,提取效果不太好,提取对象太碎,有一定错分现象。
图3.11 NDVI数码相机影像及提取的非植被区域提取方法:分割尺度为10;利用增强归一化差异植被指数提取。
ENDVI = (R + G - 2 *B / (R + 2*B + G)提取结果:图中显示的是提取的裸地及植被健康状况较差的地区,图中跑道、裸露的运动场、球门及树被提取出来。
在有草生长的区域,能较好的提取健康状况较差的草坪,提取的精度较高。
利用eCognition半自动_半人工解译

利用eCognition进行半自动/半人工解译——以道县为例分类系统试验区分类系统如表1所示:表1 道县试验区土地覆盖遥感分类系统eCongnition对中文的识别效果不是很好,因此为了避免因中文名称带来的麻烦以及便于识别,本次分类一律采用拼音类别名称。
0建立工程(1)新建工程选择菜单栏File→NewProject,或点击工具栏的按钮,新建一个工程文件。
图0-1 新建工程(2)加载影像选择需要输入的影像,影像存放的路径不能有中文,双击波段可以更改波段的名称,必须勾选“Use geocoding”(否则,输出的分类结果无投影信息,数据无法拼接)。
利用地理坐标双击可更改波段的名称可插入专题图,参与分类图0-2 加载影像在建立工程(Create Project)的窗口中,如图0-3所示,点击No Data按钮,打开Assign No Data Value窗口,勾选Usesingle value for all layers(union),令背景不参与运算。
图0-3设置背景不参与运算(3)进行波段组合叠加显示影像Edit Image Layer Mixing图0-4设置波段组合显示点击工具栏上的Edit Image Layer Mixing按钮,这里进行标准假彩色合成,然后选择下方的线性拉伸(Linear2%),操作者可以根据自己的个人视觉感受去调试选择不同的显示方式。
1分割分割是面向对象分类软件ecognition里面进行影像分类处理的第一步工作,其目的是按照一定的规则将栅格图像划分为若干对象,划分后的对象即为处理的最小对象。
如果不进行分割,后面的分类及自定义特征值等均不能进行。
本次作业分割的具体步骤为:1.1多尺度分割多尺度分割(multiresolutionsegamentation)界面如下图所示:图1-1 多尺度分割界面图1-1中编号为1、2、3的红框含义是:选择“multiresolution segmentation”算法为分割后层命名设置分割尺度值。
三种图像分割算法的对比及图像分割方法的改进

摘 要 通过研究 图像 分割算法的原理和实验对 比,可 以发现标记分水 岭分 割方 法是 以边缘特 性为基础 ,通过设置光谱特征标记 来分割 图像 ,其分 割结果边缘精度高 ,但 是仍然存 在较为严重的过分割和欠分割情况。而 mean shift分 割方法和 eCognition分 割方法 是 以光谱特征为分割依据 的分 割方法 ,虽然它们分 割结果 的过分 割和 欠分 割情况较少 ,但是分 割对象 的边缘精度较差。分析 以上存 在 的问题后 ,通过 融合边缘特征和 区域特征 ,并且依据一定 的特征来选择种子 点,尽 量避 免种 子点选择在边 缘 区,从 而实现提高 图像 分 割的效果。通过实验取得 了好的分割效果 ,说 明改进 的图像分 割方 法是 可行 的。
segmentation results,but the edge precision of segm enting objects is poorer.With the analysis on the problems above,in this paper we select
the seed points according to certain features through fusing the edge fealures and regional features.and do best to avoid the seed points to be chosen near the edges,SO as to improve the image segmentation effects.Better result is also obtained through the exper iment,this proves that the improved segmentation method iS feasible.
基于eCognition的土地利用遥感影像自动提取研究
第48卷第12期2 0 1 7年6月人民长江Yangtze RiverVol.48,No. 12June,2017文章编号:1001 -4179(2017) 12 -0075 -04基于eCognition的土地利用遥感影像自动提取研究周勇兵,曹珥(武汉大学遥感信息工程学院,湖北武汉430079)摘要:遥感监测是开展区域水土流失动态监测的重要手段。
对同一地区不同时期遥感影像进行影像分类,对比分析两期分类结果可以实现对土地利用等水土流失影响因子的动态监测。
传统方法通常采用人工目视勾绘法获得土地利用分类结果,耗时耗力且效率不高。
以同一地区不同时期的遥感影像为对象,基于eCognition软件平台,采用多尺度分割和面向对象分类方法快速获取了影像分类结果。
结果表明,该方法分类精度较高,能有效提高工作效率。
关键词:水土流失;土地利用;多尺度分割;面向对象分类;eCognition中图法分类号:S157 文献标志码:A D O I:10. 16232/ki. 1001 -4179.2017. 12. 020水土流失可破坏水土资源,恶化生态环境,加剧自 然灾害,严重制约国家经济社会的可持续发展。
开展 水土流失动态监测对水土保持科学决策、生态建设和 环境保护至关重要。
近年来,遥感监测已成为区域水 土流失监测的重要技术手段。
土地利用、植被覆盖等 水土流失影响因子信息提取是遥感监测的核心环节,采用人工目视判读方法,往往需要很大的人力物力支 撑,所以通过一些自动或者半自动的分类方法是提高 工作效率的重要途径。
eCongnition作为世界第一个面 向对象的分类软件,可以有效地提高图像分类的效率,同时拥有较高的精度。
1面向对象的分类遥感图像分类的方法有很多种,例如K均值分 类、最大似然法分类、支持向量机分类、神经网络法分 类和面向对象法分类等。
非面向对象分类的方法是基 于像元的光谱信息进行分类,但是因为同物异谱以及 异物同谱现象的大量存在,容易产生“椒盐现象”,使 得这些方法分类效果不好,尤其是在对一些分辨率高 的遥感影像进行分类的时候。
遥感图像解译eCognition软件实习报告
《遥感图像解译eCognition软件》实习报告2021年11 月eCognition软件数据处理报告目录目录 (1)1实习原理 (2)2实习目的 (2)3实习步骤 (2)3.1导入数据,进行预处理 (3)3.2影像分割 (5)3.2.1棋盘分割 (5)3.2.2四叉树分割 (6)3.2.3多尺度分割 (7)3.2.4波谱差异分割 (9)3.3建立分类体系 (10)3.4样区选择与特征空间的构建 (11)3.4.1样区选择 (11)3.4.2特征空间构建 (12)3.5执行分类 (15)3.3结果输出 (16)4实习心得 (17)正文一.实习原理随着遥感技术的不断发展,遥感信息的现势性、宏观性、成图周期短、多时性和立体覆盖能力的优势,让其在土地利用信息获取方面发挥着越来越重要的作用。
利用遥感影像对地物进行分类,并根据分类结果影像编制专题地图,也已经成为了土地利用,监测方面不可缺少手段。
而遥感影像分类的精度,直接影响着遥感数据可利用性和专题地图的精度。
因此利用相关软件或者算法提高遥感影像分类的精度,成为了提升遥感数据使用价值中刻不容缓的任务。
eCognition系列软件作为面向对象影像分析技术的专业软件,与传统的ERDAS/ENVI/PCI等有明显的不同,虽然ERDAS和ENVI里也有相应的面向对象分类模块,但其对高分辨率影像的信息提取效果,及高分辨率影像涉及的各个行业的应用范围无法与eCognition软件相比。
eCognition软件最大的特色采用面向对象的遥感影像分析。
首先将影像按照一定尺度分割成一个个对象,然后对每一个对象封装其光谱、形状、纹理等特性并且建立该对象与其相邻对象、父对象、子对象之间的关系。
其中主要包括分割与分类两个步骤。
分割——是指依据某种同质性或者异质性标准,将影像划分成很多小块对象的过程;是分类的前提。
分类——是指依据小块对象的形状、颜色、纹理、空间关系、隶属关系等属性来识别所属类别的过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
eCognition中的分割与分类方法研究
1 eCognition中的图像分析主要过程如下:
图1 eCognition中图像分析的主要流程
2 Multiresolution segmentation
采用不同的尺度,进行多次分割,形成网络层次结构,每一个分割都利用低
一层的影像对象作为原料,这些原料随之在新分割中进行合并。同时,也遵循高
一层中的对象边界限制。这个网状结构是一个拓朴关系,比如,父对象的边界决
定了子对象的边界,父对象的区域大小由子对象的总和决定。每一层都由它的直
图像分析
多尺度分割
导入eCognition
专题图
地形图
光谱因子
形状因子
产生一般的分类
分类(没有关联类别的分类)
原始影像
几何精校正
图像融合
控制点
数据
图像预处理
1.标准最临近分类
(训练样本)
2.隶属度函数分类
产生子类(产生目的类)
分类(有关联类别的分类)
基于分类的分割
分类后处理
输出结果
接的子对象来构成,在下一个高层上,子对象合并为大对象。这个合并会被已有
父对象的边界所限制。如果是不同的父对象,那么相邻的对象不能进行合并。
图2 影像多尺度分割的网络层次结构
从一个单个像元开始,分别与其相邻对象进行计算,若相邻的两个对象和合并后
的异质性指标小于给定的域值,则合并,否则不进行合并。当一轮合并结束后,
以上一轮生成的对象为基本单元,继续分别与它的相邻对象进行计算,这一过程
将一直持续到在用户指定的尺度上已经不能再进行任何对象的合并为止。
3 Computation of the heterogeneity criterion
1)对象的光谱(spectral)异质性指标colorh:
•ccccolorwh (1)
其中c为图层的权重,c为图层的标准差,c 为图层数;根据不同的影像特性
以及目标区域(interest object)特性,图层间的权重调配亦有所不同,可依使
用的需求加以调整。
2)对象的形状(spatial)异质性指标shapeh:
scompactnescompatnesssmoothnesssmoothnessshapehhh (2)
其中形状的异质性指标是由平滑(smoothness)与紧密(compactness)这两个子异
质性指标所构成,smoothness与scompactnes代表两者间的权重调配,两者的和为1;
平滑指标与紧密指标计算如下式所示:
(3)
(4)
其中,l为对象的实际边长,b为对象的最短边长,n为对象面积;若平滑指标
222111ObjObjObjObjObjObjMergeMergeMergesmoothnessblnblnblnh
222111ObjObjObjObjObjObjMergeMergeMergescompactnesnlnnlnnlnh
的权重较高,分割后的对象边界较为平滑,反之,若紧密指标的权重较高,分割
后的对象形状较为紧密较接近矩形,根据不同的影像特性以及目标对象(interest
object)特性,两者间的权重调配亦有所不同,可依使用者的需求加以调整。加
入形状的因子于影像分割的过程中,能约制对象形状的发展,使分割后的区域形
状较平滑完整,较符合人的视觉习惯。
3)对象的整体异质性指标h:
shapeshapecolorcolor
hhh
(5)
对象整体的异质性指标是由上述的光谱异质性指标与形状异质性指标所构成,
color
与shape代表光谱与形状两者间的权重调配,两者之和为1,亦可依使者的
需求进行调整。
分割流程如下:
图3 分割流程
依据以上流程,每一尺度层次的分割可以设计采用如下图所示的算法程序框图:
是 否
是 否
输入图像
设置各项参数
第一次分割
以单个像元为起点,
计算与临近像元合并
后的异质性
f第二次分割
以第一次分割生成的区域
对象为起点,计算与临近对
象合并后的异质性
f第n次分割
以第n-1次分割生成的区域
对象为起点,计算与临近对
象合并后的异质性
……
……
停止分割
图4某一尺度上的分割算法流程框图
4 分类法
eCognition中面向对象分类法采用模糊分类原理,有两种分类器:最邻近分
类器和隶属度函数分类器。
1)最临近分类法:
对于每一个影像对象,在特征空间中寻找最近的样本对象,如果一个影像对
象最近的样本对象属于A类,那么这个对象将被划分为A类。实际操作时,通过
一个隶属度函数进行,影像对象在特征空间中与属于A类样本对象的距离越近,
则属于A类的隶属度越大。影像对象属于哪一类,由隶属度来确定,当属于每一
类的隶属度值小于最小的隶属度(可以设置,如0.1)时,该影像对象不被分类。
影像对象o与样本对象s之间的距离计算公式:
(6)
设置分割尺度参数,光谱和形状因子
将每个像元视为一个对象,以任
意一个像素为起始点存入队列1
从队列1中取一个种子点放入队列2中 取一个种子点, 在其四邻域内,计算相邻两个对象合并后的的异质性指标f 队列2中 有无种子点 是 否 是 否 f结束
ffofsfvv
d
2
d通过所有特征值的标准差而得到归一化,基于距离d的多维指数隶属度函
数为:
(7)
其中, ,function slope= z(1)。
图5 最邻近分类法的隶属度函数
2) 隶属度函数分类法
隶属度函数可以精确定义对象属于某一类的标准,一个隶属度函数是一维
的,是基于一个特征的。因此如果一个类仅通过一个特征就能和其它类区分,或
者只用少数的特征,可以使用隶属度函数。比如,用“layer mean”将分割影像中
的水体提取出来。通常,类别可以通过将各种特征组合起来来识别,所用的操作
2
dkedz•
slopefunctionk1ln
为“and” “or” and “not”等,比如, 可以用“low layer mean”特征和“high length/width
ratio”。因此,可以建立语义层次结构,综合各种特征对影像进行分类。
算法与最邻近法相似,对每一个特征,计算特征值,选择适当的隶属度函数,
将其归属到[0-1]的隶属度,有不同特征时,可以通过“and” “or” and “not”等操作
进行组合。
可以用作类描述的特征主要有三类:Object Features(对象特征),
Class-Related Features(类间特征),Global features(全局特征)。
下面列出了几种基本的特征参数及其简要描述,当然,还有很多参数,这里
不再一一描述。
(1)Mean(均值):
(8)
特征值范围[0,依据数据的颜色位数],对8bit数据来说范围是[0-255]。
(2)StdDev(标准差)
(9)
(3)Area
没有地理参考时,一个像素的面积认为是1,有地理参考时,一个影像对象
的面积就是它的实际面积。
(4)Length/width
SeigSeigw
l
2
1
,SeigSeig21 (10)
(5)Rectangular fit
第一步,先制造一个面积和影像对象相等的矩形,此矩形的长宽比等于影像对象
的长宽比。第二步,将矩形外的物件面积比上矩形内的物件面积。0代表完全不
匹配,1代表完全匹配。
•niLiLcnc1
1
•niLLiLccn1
2
1
1