电液比例阀控缸速度控制系统的建模与仿真
基于Simulink的比例阀控液压缸的建模与仿真
基于Simulink的比例阀控液压缸的建模与仿真张兵;邓子龙【摘要】By improving the hydraulic system of the clamp experiment table to make it a closed-loop control system, and taking the system as the research object, the mathematical model and simulink simulation model are established. The dynamic performance in time and frequency domains is analyzed. Aiming at the improvement of the dynamic performance ofthe system, the damping ratioδh , the hydraulic cylinder frequency wh ,and the open loop gain Kc , of the close-loop control ing system, and their effect on the dy-namic performance of the system are analyzed by using MATLAB so as to provide reference for the design, calibration and optimiza-tion of the hydraulic system.%通过对夹具实验台液压系统进行改进,使其成为闭环控制系统并以此系统为研究对象,建立数学模型和Simulink仿真模型,分析了系统在时域和频域的动态性能。
从提高系统动态特性的角度出发,应用MATLAB分析了液压缸频率wh、阻尼比δh 和闭环控制系统开环增益Kc 对系统动态性能的影响,从而为液压系统的设计、校正、优化提供借鉴。
电气工程中电液伺服系统的建模与控制

电气工程中电液伺服系统的建模与控制电液伺服系统在电气工程中扮演着重要的角色,它是将电力和液压技术相结合的一种控制系统。
本文将探讨电液伺服系统的建模与控制方法,旨在帮助读者深入了解该系统的原理和应用。
1. 引言电液伺服系统是一种将电力与液压技术相结合的控制系统,它具有快速、精确以及大扭矩输出的特点,广泛应用于工业自动化领域。
该系统通常由液压执行机构、液压装置、电机、传感器以及控制器等组成。
2. 电液伺服系统的建模电液伺服系统的建模是理解系统行为和进行控制设计的重要基础。
一般来说,电液伺服系统的建模可以分为力平衡模型和压力平衡模型两种。
2.1 力平衡模型力平衡模型是基于力学平衡原理建立的,它通过分析液体在液压缸内的流动以及液压缸和负载之间的力平衡关系来描述系统行为。
该模型主要考虑了负载的机械特性以及阀门的开度对液体流量和压力的影响。
2.2 压力平衡模型压力平衡模型是基于流体的压力平衡原理建立的,它通过分析液体在液压缸内的流动以及阀门的开度对液体流量和压力的影响来描述系统行为。
该模型不考虑负载的机械特性,主要关注液体流动的特性以及阀门对压力的调节。
3. 电液伺服系统的控制电液伺服系统的控制主要包括位置控制、速度控制和力控制三种。
在控制设计中,通常使用比例积分微分(PID)控制器或模糊控制器来实现系统性能的改善。
3.1 位置控制位置控制是电液伺服系统中最常见的一种控制方式。
它通过控制液压缸的位置来实现对负载的准确控制。
在控制设计中,可以根据负载的特性选择适当的控制方法,如PID控制器或模糊控制器。
3.2 速度控制速度控制是电液伺服系统中实现对负载速度精确控制的一种方式。
在速度控制中,控制器通常根据传感器反馈的速度信号来调节液压缸的速度。
PID控制器常被用于速度控制中,通过调节比例、积分和微分参数来改善系统的响应性能。
3.3 力控制力控制是电液伺服系统中实现对负载施加特定力的控制方式。
在力控制中,控制器通常调节液压缸施加的力来满足特定的要求。
阀控液压马达速度伺服系统仿真分析资料报告

阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响。
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能。
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID 控制理论来提高系统的动态性能。
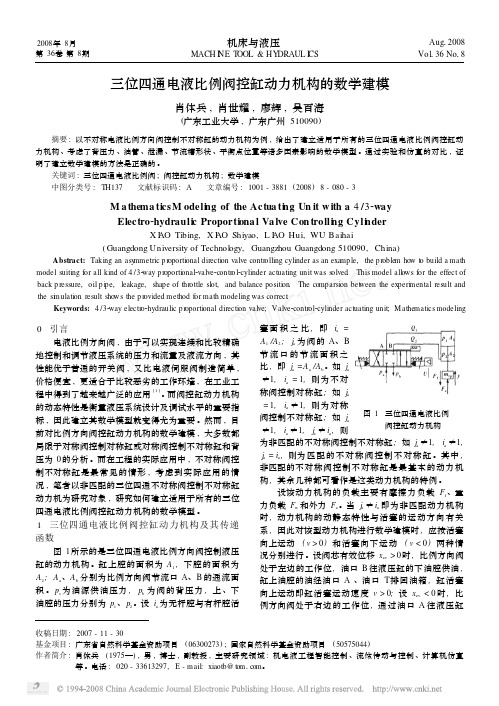
1 阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示。
液压马达的力矩方程为:fm m s l m T G s C J P +++=θ)(D (1)负载流量方程为:l em m l tm l sP Vs D P C βθ4Q +== (2)伺服阀的线性流量方程为:L p x l P K x k Q -= (3)电液伺服阀近似看成二阶振荡环节:122^2^)()(++=s S K s i s x svsvsv svv ωξω (4) 伺服放大器输出电流ΔI 与输入电压Ue 近似成正比,其传递函数可用伺服放大器增益Ka 表示:错误!未指定书签。
但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作。
校正后的积分放大器增益Ka 表示为:测速机速度传感器(测速机)的数学模型为:错误!未指定书签。
在上述公式中:v x 为电液伺服阀阀芯位移;i 为电液伺服阀输入电流;v sv k s sv ωξ、、分别为电液伺服阀的增益、阻尼系数和固有频率;m D 为马达排量;L Q 为马达的负载流量;x K 为流量增益系数;p K 为流量一压力系数;只为供油压力;s P 为负载压力;m θ为马达转速;e β为从油液有效体积弹性模数;V 为马达的总容积;J 为折算到马达输出轴上的转动惯量;f T 为外干扰力矩;tm C 为马达泄露系数;m C 为粘性阻尼系数;G 为扭簧梯度。
电液比例阀控缸位置控制系统的研究与应用

电液比例阀控缸位置控制系统的研究与应用一、本文概述电液比例阀控缸位置控制系统是现代工业领域中一种重要的高精度控制技术,广泛应用于机械制造、航空航天、自动化设备等多个领域。
本文旨在深入研究电液比例阀控缸位置控制系统的设计原理、控制策略及其在实际工程中的应用情况。
本文首先介绍了电液比例阀控缸位置控制系统的基本概念和工作原理,阐述了电液比例阀在系统中的关键作用以及控缸位置控制的重要性。
接着,详细分析了系统的关键技术,包括电液比例阀的设计要求、控制算法的选取与优化、传感器的精度与响应速度等。
同时,本文还探讨了系统在设计和实施过程中可能遇到的挑战和问题,如动态响应的优化、抗干扰能力的提高、系统的稳定性和可靠性保障等。
文章还对当前电液比例阀控缸位置控制系统的研究进展进行了综述,总结了国内外学者在该领域的最新研究成果和发展趋势。
通过实际案例分析,验证了所提出控制策略的有效性和实用性,为工程技术人员在类似项目中的设计和应用提供了有价值的参考和指导。
通过本文的研究,旨在推动电液比例阀控缸位置控制系统的技术进步,促进其在更广泛领域的应用和发展。
二、电液比例阀控缸位置控制系统概述电液比例阀控缸位置控制系统是一种先进的流体动力控制系统,它通过电液比例阀调节液压油的流量和压力,从而精确控制液压缸的位置。
这种系统在许多工业应用中扮演着关键角色,尤其是在需要高精度、高响应性和高可靠性的场合。
电液比例阀控缸位置控制系统的核心组件包括电液比例阀、液压缸、传感器和控制器。
电液比例阀作为系统的执行元件,负责根据控制信号调节液压油的流量和压力。
液压缸作为系统的动力输出元件,将液压油的能量转换为机械能,驱动负载运动。
传感器用于实时监测液压缸的位置,并将反馈信号发送给控制器。
控制器根据预设的位置轨迹和传感器的反馈信号,调整电液比例阀的开度,实现对液压缸位置的精确控制。
电液比例阀控缸位置控制系统的关键优势在于其高精度和高响应性。
由于电液比例阀可以快速响应控制信号,系统可以在很短的时间内达到设定的位置,从而满足高速、高精度控制的需求。
电液伺服系统的建模与控制研究

电液伺服系统的建模与控制研究引言:电液伺服系统(Electro-Hydraulic Servo System)是一种广泛应用于机械领域的控制系统,其通过电气信号控制液压元件,实现对物体位置、速度和力的精确控制。
随着工业自动化技术的不断发展,电液伺服系统在工业生产中的重要性越来越突出。
本文将从电液伺服系统的建模与控制两个方面展开研究,深入探讨其原理和应用。
一、电液伺服系统的建模电液伺服系统的建模是研究其工作原理和特性的基础。
建模是将实际系统转化为数学模型,通过模型分析和仿真研究系统的性能。
电液伺服系统的建模过程涉及到液压传动、机械传动、电气传动以及控制算法等多个方面。
1. 液压传动的建模液压传动是电液伺服系统中最关键的部分,其负责将电信号转化为液压信号,并通过液压元件传递给执行机构。
液压元件包括液压泵、阀门、缸筒等。
液压泵将液体加压,并通过阀门控制液体的流动。
液压缸通过泵送的压力作用,实现对物体位置、速度和力的控制。
液压传动的建模需要考虑压力、流量、阀门开度等方面的变化,利用流体力学和控制理论进行数学描述。
2. 机械传动的建模机械传动是将液压力转化为机械力,实现力的传递和位置的控制。
机械传动包括齿轮传动、皮带传动、曲柄机构等,其目的是将液压系统提供的力矩和转速传递给负载。
机械传动的建模需要考虑传动效率、摩擦损耗等因素,通过机械动力学和力学原理进行数学描述。
3. 电气传动的建模电气传动是将输入信号转化为电气信号,并通过电子元件和电机来实现力和速度的控制。
电气传动包括信号转换、功率放大、速度控制等。
常见的电气传动元件有电阻、电容、电感等,电机则是实现力和速度控制的核心部件。
电气传动的建模需要考虑电路理论和电机原理,通过电路分析和电机模型进行数学描述。
4. 控制算法的建模控制算法是电液伺服系统中实现控制和调节的关键。
常见的控制算法有比例控制、PID控制、模糊控制等。
控制算法的建模需要考虑系统的动态特性和控制目标,通过控制理论和信号处理进行数学描述。
电液伺服系统的建模与控制

电液伺服系统的建模与控制1. 引言电液伺服系统是一种广泛应用于工业控制领域的系统,它可以通过控制液压执行器的输出来实现对机械运动的精确控制。
本文将介绍电液伺服系统的建模与控制方法,以帮助读者更好地了解和应用这一技术。
2. 电液伺服系统的概述电液伺服系统由液压执行器、电液伺服阀、传感器和控制器等组成。
液压执行器负责将液压能转化为机械能,电液伺服阀负责控制液压执行器的动作,传感器用于反馈系统状态信息,控制器根据传感器的反馈信息对电液伺服阀进行控制。
3. 电液伺服系统的建模建模是控制系统设计的第一步,对于电液伺服系统也是不可或缺的。
电液伺服系统的建模既可以基于理论模型,也可以基于实验数据进行。
3.1 理论模型在理论模型建模中,我们需要考虑液压执行器、电液伺服阀和控制器的动态特性。
液压执行器的动态特性可以用惯性、摩擦、密封等参数来描述。
电液伺服阀的动态特性可以用阀门的流量-压力特性和阀门饱和现象来描述。
控制器的动态特性通常可以用传统的PID控制算法进行建模。
3.2 实验模型在实验模型建模中,我们需要通过实验得到系统的频率响应和传递函数,并将其转化为数学模型。
这种方法对于实际系统的建模更加准确,但也需要大量的实验数据和较高的技术要求。
4. 电液伺服系统的控制控制是电液伺服系统中最关键的环节之一。
常用的电液伺服系统控制方法有位置控制、速度控制和力控制等。
4.1 位置控制位置控制是电液伺服系统中最基本的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的位置。
传感器将执行器的位置信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的位置跟踪。
4.2 速度控制速度控制是电液伺服系统中常用的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的速度。
传感器将执行器的速度信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的速度跟踪。
4.3 力控制力控制是电液伺服系统中一种高级的控制方法。
电液系统与建模

物理建模方法
物理建模
基于电液系统的物理原理,建立反映系统本 质的模型。
优点
能够反映系统的本质特性,适用于复杂系统 的建模。
建模步骤
分析系统物理过程、确定物理量、建立物理 方程、求解物理方程。
缺点
建模过程较为复杂,需要深入了解系统物理 过程。
混合建模方法
混合建模
结合数学建模和物理建模的方 法,建立更为精确和实用的模
05 电液系统应用案例分析
案例一:电液伺服系统
总结词
电液伺服系统是一种基于反馈控制的电液转换系统,能够实 现高精度、快速响应的运动控制。
详细描述
电液伺服系统通过将电信号转换为液压信号,驱动液压执行 机构实现精确的位置、速度和力的控制。广泛应用于航空、 航天、能源、化工等领域,实现高精度、高动态性能的控制 要求。
电液系统与建模
contents
目录
• 引言 • 电液系统概述 • 电液系统建模方法 • 电液系统控制策略 • 电液系统应用案例分析 • 结论与展望
01 引言
主题简介
电液系统
电液系统是将液压传动和电力传 动相结合的一种传动方式,具有 高效率、高精度和快速响应的特 点。
建模
建模是通过对实际系统的抽象和 简化,建立数学模型的过程,是 研究系统动态特性和优化控制的 重要手段。
案例二:电液比例控制系统总结词电液比例控制系统是一种基于比例阀 的电液转换系统,能够实现连续的控 制输出。
详细描述
电液比例控制系统通过比例阀将电信 号转换为液压信号,实现连续的液压 输出,广泛应用于注塑机、压机、船 舶等领域,实现精确的位移、速度和 力的控制。
案例三:电液复合控制系统
总结词
电液复合控制系统是一种结合了电液伺服系统和电液比例控制系统的复合控制系统,能够实现高精度、快速响应 和连续控制的综合需求。
三位四通电液比例阀控缸动力机构的数学建模
+
ξ 2
( 1)
s +1
式中 : Cd 为比例阀节流口的流量系数 ; pL0为系统平衡点的负载压力 ; ρ 为油液的密度 ; w b0为动力机构位于平衡点时节流口 B 的面积 梯度 ( m ) 。 ( 1 ) 面积梯度的计算 比例方向阀的节流口一般由在圆周方向均匀分布 的几个节流槽组成 。面积梯度与阀芯节流槽的形状有 关 , 常见的比例方向阀节流槽的形状有三角形 、矩形 和半圆形等几种 。 节流口 B 的面积梯度为 9A b ( 6) w b0 = = nb w i 9xev x = x 其中 : xev0为动力机构的平衡点的有效阀芯位移 , nb 为节流口 B 的节流槽的数目 , w i 为节流槽的面积梯 度。 当节流槽为矩形时 , 其面积梯度 w i 为常数 , 计 算公式为
Abstract: Taking an asymmetric p roportional direction valve controlling cylinder as an examp le, the p roblem how to build a math model suiting for all kind of 4 /3 2 way p roportional2valve 2control2cylinder actuating unit was solved. back p ressure, oil p ipe, leakage, shape of throttle slot, and balance position. the sim ulation result show s the p rovided method for math modeling was correct . Keywords: 4 /3 2 way electro 2hydraulic p roportional direction valve; Valve 2control2cylinder actuating unit; M athematics modeling This model allow s for the effect of The comparsion betw een the experi m ental result and