第3章3_多自由度体系的振动.
第六讲--多自由度系统振动-2
解: 1)求柔度系数
m
31
k/5
m
21
k/3
P=1
2m k
11
32 4
P=1
22 4 12
P=1
33 9
23 4 13
11 1/ k 21 31 11
22
1 k
1 k /3
4
22
1 k
1 k/3
1 9
k /5
3.3.1 柔度法
1 1 1
柔度矩阵: [ ] 1 4 4
1 4 9
2)求频率
2 0 0
质量矩阵: [M] m 0 1 0
0 0 1
由频率方程: M I 0
2 1 1 m 2 4 4 0 ,
2 4 9
展开式为: 3 15 2 42 30 0
1 m m2
方程三个根为: 1 11.601 2 2.246 3 1.151
三个频率为:
1 0.2936
k m
4Y
4 4
3.4.1 主振型矩阵与正则坐标
(2)正则坐标 任意一个质点的位移 y 都可按主振型来组合:
y1 1Y11 2Y12 3Y13 y2 1Y21 2Y22 3Y23
yi 1Yi1 2Yi2 3Yi3
yn 1Yn1 2Yn2 3Yn3
nY1n nY2n
y1
y2
Y1 Y121
Y YYY132111
Y2 1
Y2 2
Y32
Y3 1
Y3 2
Y33
Y14 Y4
2
Y34
Y41
Y2 4
Y3 4
Y44
主 振
型 矩 阵
第一振型
1
第3章 振动系统的运动微分方程题解
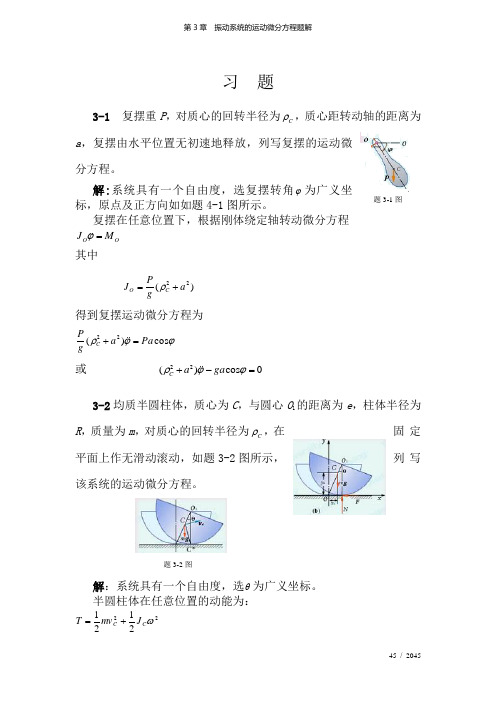
45 / 2045习 题3-1 复摆重P ,对质心的回转半径为C ρ,质心距转动轴的距离为a ,复摆由水平位置无初速地释放,列写复摆的运动微分方程。
解:系统具有一个自由度,选复摆转角ϕ为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程O O M J =ϕ其中)(22a gP J C O +=ρ 得到复摆运动微分方程为ϕϕρcos )(22Pa a gP C =+ 或0cos )(22=-+ϕϕρga a C3-2均质半圆柱体,质心为C ,与圆心O 1的距离为e ,柱体半径为固定R ,质量为m ,对质心的回转半径为C ρ,在平面上作无滑动滚动,如题3-2图所示,列写该系统的运动微分方程。
解:系统具有一个自由度,选θ为广义坐标。
半圆柱体在任意位置的动能为:222121ωC C J mv T +=题3-1图题3-2图46 / 2046用瞬心法求C v :2222*2)cos 2()(θθθ Re R e CC v C -+== θω = 2CC m J ρ= 故2222221)cos 2(21θρθθ Cm Re R e m T +-+=系统具有理想约束,重力的元功为 θθδd mge W sin -=应用动能定理的微分形式W dT δ=θθθρθθd mge m Re R e m d C sin 21)cos 2(2122222-=⎥⎦⎤⎢⎣⎡+-+ θθθθθθθθθθρd mge d mRe d mRe d R e m C sin sin cos 2)(2222-=+-++ 等式两边同除dt ,θθθθθθθθθθρ sin sin cos 2)(2222mge mRe mRe R e m C -=+-++ 0≠θ ,等式两边同除θ故微分方程为0sin sin )cos 2(2222=+++-+θθθθρθmge mRe Re R e m C ① 若为小摆动θθ≈sin ,1cos ≈θ,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动的微分方程为0])[(22=++-θθρge r R C要点及讨论(1)本题也可以用平面运动微分方程求解。
机械振动学(第三章)-多自由度振动系统

装备制造学院
College of Equipment Manufacture
利用直接法,对下图所示的三自由度振动系统建立微分方程。。
装备制造学院
College of Equipment Manufacture
解:1)受力分析 选取 m1, m2和m3离开平衡位置的坐标x1, x2和 x3 为3 个独立 坐标。受力分析如图所示 2)建立振动微分方程 (c c ) x c x ( k k ) x k x p (t ) x m1: m 2 2 2 2 2 ( c 2 c 3 ) x 2 c2 x 1 c 3 x 3 ( k 2 k 3 ) x 2 k 2 x1 k 3 x 3 p 2 ( t ) x m2: m 2 2 2 2 3 c 3 x 3 c3 x 2 k 3 x3 k 3 x 2 p 3 (t ) x m3: m 3
装备制造学院
College of Equipment Manufacture
本章结束
装备制造学院 College of Equipment Manufacture
3 )如果将应为能量耗散函数 D 引起的阻尼力也从其他的非势 力的广义力中分离出来,并使Qi仅代表外部作用的广义激振力, 则可将非保守系统的拉格朗日方程改为:
d dt ( T i q ) T i q U qi D i q Q i ( i 1, 2 , 3 ,...., n )
车 身 车 轮 二 自 由 度 振 动 问 题
装备制造学院
College of Equipment Manufacture
装备制造学院
College of Equipment Manufacture
第五六讲两自由度系统的振动

s in(02t
2
)
A(1) 1
,
A(2) 1
,
1,
2
由运动的初始条件确定。
3、系统对初始激励的响应
将(5)式写出以下形式:
x1(t) x2 (t)
C1 sin(01t C1r1 sin(01t
1) 1)
C2 sin(02t 2 ) C2r2 sin(02t 2
J1
0
0 J2
12
k1
k k 2
2
k 2
k 2 k
3
1
2
M1 (t ) M 2 (t)
多自由度系统的角振动与直线振动在数学描述上相同
如同在单自由度系统中做过的那样,在多自由度系统中 也将质量、刚度、位移、加速度及力都理解为广义的。
)
将 x10,x20,x10,x20 代入得:
其中C1、C2分别表 示A1(1)、A1(2)
C1
1 r2 r1
r2 x10 x20
2
r2 x10 x20
2 01
2
C2
1 r2 r1
x20 r1x10 2
x20 r1x10 2
量
量
若系统有 n 个自由度,则各项皆为 n 维
17
3.2 两自由度系统的自由振动
1、固有频率求解
有上一讲可知系统的
x1
k1
k2
m1
运动微分方程为::
x2
k3
m2
m1x1 (k1 m2x2 k2 x1
第3章 实验模态分析的基本理论

实验模态分析第三章:实验模态分析的基本理论振动系统的特性可以用模态来描述:固有频率、固有振型(主振型)、模态质量、模态刚度和模态阻尼等。
建立用模态参数表示的振动系统的运动方程并确定其模态参数的过程使称为模态分析。
—种理解可以认为,振动系统的物理模型、物理参数和以物理参数表示的运动方程都是已知的,引入模态参数、建立模态方程的目的是为了简化计算,解除方程耦合,缩减自由度。
另一种理解可以认为,通过对实际结构的振动测试,识别振动系统的模态参数,从而建立起系统的以模态参数表示的运动方程,供各种工程计算应用。
试验模态分析指的是后一种过程,即通过振动测试(称模态试验),识别模态参数,建立以模态参数表示的运动方程这样一个过程。
1 多自由度系统振动基础回顾&&&++=M x C x K x f t []{}[]{}[]{}{()} 2实模态理论一个n 自由度线性定常振动系统,其运动方程可以如下表示:现对两端作付氏变换得:[]{}[]{}[]{}{()}M x C xK x f t ++=&&&2([][][]){()}{()}M j C K X F ωωωω−++=式中和分别是x(t)和F(t)的付氏变换,并有()X ω()F ω()()j t X x t e dt ωω+∞−−∞=∫()()j t F f t e dtωω+∞−−∞=∫(){()}{()}Z X F ωωω=111212122212()()()()()()()()()()n n n n nn Z Z Z Z Z Z Z Z Z Z ωωωωωωωωωω⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦L L L L L L L 1()[()]{()}{()}{()}X Z F H F ωωωωω−==2[][][]K M j C ωω=−+阻抗矩阵中各元素值无法在实际振动测试中获得,因为人们不可能在实际结构上固定其它坐标,令其不动,仪留下J坐标,待其作出响应;也不可能仅使某个坐标运动,在其余坐标上测量力。
建筑结构抗震设计课件第3章第4节

i2
m1
i振型上的惯性力在
j振型上作的虚功
X1i
m2
mn
X X
2i ni
i2
m
X
i
Wij m1i2 X1i X1j m2i2 X2i X2 j L
i2
X
T j
m
X
i
2.主振型的正交性
i振型上的惯性力在 j振型上作的虚功:
Wij
i2
X
2k m2 k12
0
k k m2
m2
EI1
k2 m1
EI1
k1
X
1
1 1.618
X 2
1 0.618
(2k 2m) k 2m k2 0
1.618
0.618
1 0.618 k / m 2 1.618 k / m
X11 1 ; X12 1 X 21 1.618 X 22 0.618
y1 y2
X1 sin(t ) X2 sin(t )
k11 X1 k21 X1
k12 X 2 k22 X 2
m12 X1 0 m22 X 2 0
(
k11 k21
k12
k22
m1 0 0 m2
2
)
X1 X2
=
0 0
(k2 m)X 0...366
k2 m 0...(3 69)
i) i)
质点上的惯性力为:
X 21
m2
X
2i
2 i
I1(t) I2 (t)
m1 y1 m2 y2
m1
X
1i
2 i
sin(
i
t
i
m2
振动力学(两自由度系统和多自由度系统)

2
振动理论及应用
第3章 多自由度系统的振动
3.1 两自由度系统的振动方程 ——刚度矩阵和质量矩阵
建立运动微分方程的方法和单自由度系统基本一样, 但难 度更大。
3.1.1 运动微分方程
标准的m-k-c系统,对每一质量利用牛顿定律得:
3
振动理论及应用
坐标原点仍取在静平衡位置
具体求解时,只假设j坐标处的位移为1,其它各坐标的位 移均为0。
7
振动理论及应用
5.2.3 惯性影响系数与质量矩阵
第3章 多自由度系统的振动
质量矩阵[M]中的元素称为惯性(质量)影响系数,其 mij的力学意义是:仅在j坐标处产生单位广义加速度,需在i坐 标处施加的广义力。
具体求解时,只假设j坐标处的加速度为1,其它各坐标的 加速度均为0。
2
x1 5 kx1 5 kx2
V x2
2 5
kx1
1 5
kx2
26
振动理论及应用
第3章 多自由度系统的振动
计算广义力,设只有x1处产生虚位移x1,则
Q1
cx1 x1 x1
cx1
同样设x2处产生虚位移x2,则
Q2
c 0
x2
0
代入拉格朗日方程即可。
27
振动理论及应用
第3章 多自由度系统的振动
5l 3
48EI
k12
l3 3EI
k22
1
求出各个刚度系数即组 成刚度矩阵[K]。
17
振动理论及应用
第3章 多自由度系统的振动
用拉格朗日方程 建立振动系统的运动微分方程
对于非标准的m-k-c多自由度振动系统,用传统的动力学 方法建立运动微分方程比较困难,更适合使用拉格郎日方程和 能量的方法。拉格郎日方程为:
同济 汽车振动 机械振动 PPT第三章+多自由度系..
1 1 1 3 −1 0 1 1 1 6 0 0 KΦ = ΦT KΦ = 2 0 −1 k −1 2 −1 2 0 −1 = k 0 6 0 1 −1 1 0 −1 3 1 −1 1 0 0 12
变换后的方程为:
&& QN + KNQN = P N
&& qN1 +ω q = pN1 ( t ) && qN2 +ω q = pN2 ( t ) M 2 qNn +ωnnqNn = pNn ( t ) &&
注意:以上为广义的向量正交性的概念 注意:
当i = j时,A KA = ω A MA
2 ni
( i)T
( i)
( i)T
( i)
由于质量矩阵为正定矩阵,刚度矩阵为半正定 矩阵,因此有:
设 (i) MA(i) = m →第阶 量 质量) A i 主质 ( 模态 pi i ( i)T 设 KA( ) = kpi →第阶 i 主刚 ( 模态刚 ) 度 度 A 2 ωni = kpi mpi 第阶 i 固有 频率
( 4)
MA = 0
( i)
Qi ≠ j ⇒ω ≠ ω ⇒ A MA = 0
2 ni 2 nj
( j)T ( i)
代 (1) ⇒ A KA = 0 入
( j)T
当 ≠ j时 i , ( j )T A MA( i) = 0 主振型向量对质量矩阵的正交性 jT A( ) KA( i) = 0 主振型向量对刚度矩阵的正交性
( 2)
L 0 O M ( n)T ( n) L A KA L 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 0 2 n (km mn ) 11
由此可以求出n个自由振动频率。按其数值由小到大排列为 ω1ω2…ωn。其中最小频率称为基本频率。
二、柔度法
柔度法:由各质点运动的位移协调条件建立微分方程; 按照力法的概念求解: n 1 3 2 a. 确定体系的振动自 由度; b. 依次给予质点施加 f n1 f 11 f 31 f 21 一单位力。在此力 1 作用下,各质点产 生的位移。 f n2 f 12 f 32 f 22 如质点受力: i y 惯性力: mi 1
一、刚度法
同理,体系中的每一个质点都可以列出相应的动力平衡方程 式,即用刚度法推导的多自由度体系自由振动时的运动微分 方程式。 m k y k y k y 0 y
2 k21 y1 k22 y2 k2n yn 0 m2 y n kn1 y1 kn2 y2 knn yn 0 mn y
1 f12 m2 2 f1n mn n y1 0 f11 m1 y y y 1 f 22 m2 2 f 2 n mn n y 2 0 f 21 m1 y y y 1 f n 2 m2 2 f nn mn n y n 0 f n1 m1 y y y
第三节 多自由度体系的振动
1. 2.
运动微分方程式的建立及求解 振型向量的概念 ;
3.
自由振动频率和振型计算示例 ;
3.1 运动微分方程式的建立及求解 一、刚度法
刚度法:由各质点力的平衡条件建立运动微分方程;
按照位移法的概念求解:
a. 对体系所有的独立位
1
2
3
n
移都施加相应的约束;
1
K21 K31 Kn1 K11
KY 0 MY
方程特解:
KY 0 将Y 代入方程 : MY 即: 2MX sin( t ) KX sin( t ) 0 则: (K 2M )X 0
这是一组X的线性齐次方程式组。欲使振幅向量X存在非零 解,即体系发生振动,则必须有: K 2M 0 这个方程称为频率方程,未知量为频率ω。将上式展开为: 2 ( k ) k m1 0 k1n k11n 11 m 12 k11 k12 2 2 k 21 ( k mm k k21 k22 k 21 11 2 )2 21
b. 依次给予约束一单位位 移。在此位移影响下, 其它约束均产生反力。
如质点1受力: 惯性力: m1 1 y
1
K12 K22 K32 Kn2
(
各约束的反力: k1i yi
约束是虚设的,这些反力之和应为零。质点1的平衡方程式为:
1 k11 y1 k12 y2 k1n yn 0 m1 y
写成矩阵形式为:
f11 f 21 f n1 f12 f1n f 22 f1n f n 2 f nn 1 1 0 y 0 y1 m1 1 y 2 m2 y 2 0 0 m y 0 1 n yn n
也可以写成:
KY 0 MY
一、刚度法
设微分方程式的特解为:
y1 X (1) y X (2) 2 t ) sin( X (n) yn
各质点按同一频率同一位相 作简谐振动。可写成 :
1 1 11 1 12 2 1n n
写成矩阵形式为:
m1 0 m2 0 mn 1 k11 y k y 2 21 y n k n1 k12 k 22 kn2 k1n k 2n k nn y1 y 2 0 yn
ห้องสมุดไป่ตู้
1 fi2m2 2 finmn n y y i点位移: yi fi1m 1y 1 fi2m2 2 finmn n yi 0 y y y 即: fi1m1
二、柔度法
同理,体系中的每一个质点都可以列出相应的动力位移方程 式,即用柔度法多自由度体系自由振动时的运动微分方程式。
Y X sin( t )
X 称为体系的振幅向量:
ω—体系自由振动时的圆频率,简称为频率或自振频率。
m1 0 m2 0 mn 1 k11 y k y 2 21 y n k n1 k12 k 22 kn2 k1n k 2n k nn y1 y 2 0 yn
y1 X (1) y X (2) 2 t ) sin( X (n) yn
t ) 即 :Y X sin(
knn 0 kn1 kn2 k k n1 n2