一级倒立摆控制方法比较
一阶倒立摆平衡系统的控制方法研究
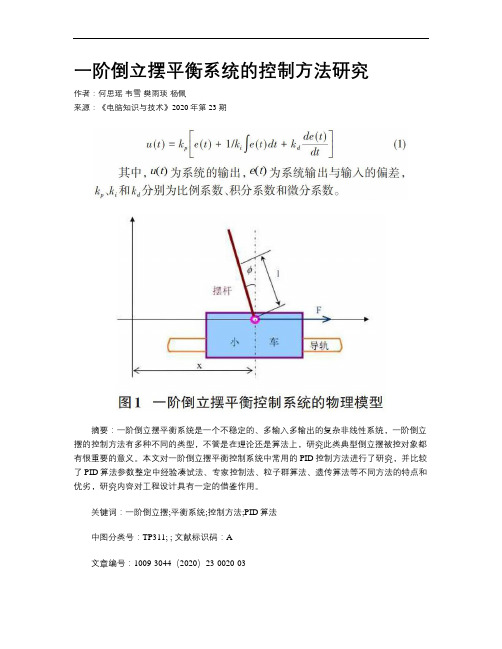
一阶倒立摆平衡系统的控制方法研究作者:何思瑶韦雪樊雨琰杨佩来源:《电脑知识与技术》2020年第23期摘要:一阶倒立摆平衡系统是一个不稳定的、多输入多输出的复杂非线性系统,一阶倒立摆的控制方法有多种不同的类型,不管是在理论还是算法上,研究此类典型倒立摆被控对象都有很重要的意义。
本文对一阶倒立摆平衡控制系统中常用的PID控制方法进行了研究,并比较了PID算法参数整定中经验凑试法、专家控制法、粒子群算法、遗传算法等不同方法的特点和优劣,研究内容对工程设计具有一定的借鉴作用。
关键词:一阶倒立摆;平衡系统;控制方法;PID算法中图分类号:TP311; ; 文献标识码:A文章编号:1009-3044(2020)23-0020-031 引言平时常见的头顶木桩杂技表演,需要杂技演员将一根长长的木桩顶在头顶,并保持木桩竖直不倒,该杂技在实质上可认为是一个一阶倒立摆平衡系统。
其中,木桩是不稳定的非线性被控对象,完全可以通过一些数学上的控制算法令其保持竖直不倒的平衡状态。
这个杂技表演揭示出了自然界的一种基本规律,即当将头顶木桩杂技表演归纳为一个一阶倒立摆模型后,就可以通过数学方法同样实现杂技的表演的平衡效果。
一个一阶倒立摆平衡系统中包含两个系统平衡位置,一个是倒立摆立起保持竖直不倒时的不稳定平衡位置,另一个是倒立摆未施加任何控制力,处于下垂而保持不动的稳定平衡位置。
在对一阶倒立摆进行平衡控制时,需要两个阶段,一个是施加控制力令倒立摆摆动起来以达到竖直平衡位置,另一个是在竖直位置施加控制力进一步地保持倒立摆平衡。
目前,在这两个控制阶段的研究方面,已比较成熟,有很多相关论文可以查阅。
这些成果基本均采用不同的控制策略和数学算法,实现对倒立摆两个控制阶段的稳定控制。
2 倒立摆介绍以及应用从20世纪60年代起,倒立摆平衡系统的研究工作就已经开始了。
一阶倒立摆平衡系统是一个不稳定的、多输入多输出的复杂非线性系统,该系统可以为控制方面的理论教学及相关课程实验提供一个理想且经典的研究验证平台,并通过该平台建立的模型来验证不同控制理论或算法的正确性和有效性,从而由倒立摆平衡系统的实例进一步在控制系统的非线性计算、稳定性分析、鲁棒性衡量、跟踪控制和随动控制等方面的问题进行深入研究。
一阶倒立摆的控制方法

一阶倒立摆的控制方法
一阶倒立摆是一种非常有趣的机械系统,它提供了在控制和稳定化方面的许多挑战。
一阶倒立摆的控制方法取决于许多因素,包括机械结构、系统响应、控制信号和传感器输入等。
在一阶倒立摆中,一个质点在垂直支撑物上平衡,支撑物可以是摆锤也可以是其他机械结构。
在“正常”情况下,质点的位置会小幅度波动,但总体上保持平衡。
在不正常的情况下,例如外力干扰或系统响应问题,质点的位置可能会失去平衡,导致设备失效。
为了解决这些问题,一些常见的控制方法包括PID控制、神经网络控制和模糊控制等。
其中,最常用的PID控制方法是基于比例、积分和微分控制来实现的。
这种方法可以计算出当前状态和目标状态的差异,然后调节偏差的大小和方向,以让设备回归到稳定状态。
另一种常见的控制方法是神经网络控制。
这种方法的理念是通过构建一个基于神经网络结构的模型来控制设备。
神经网络具有学习和记忆功能、非线性映射和复杂的自适应能力等特点,可以较好地应对一阶倒立摆的不稳定性与外部干扰的问题。
最后,模糊控制是一种模糊数学技术,它可以将输入和输出模糊化,以便通过一系列规则来达到控制目标。
模糊控制方法较为简单,但需要有丰富经验和良好的控制规则,否则很容易导致控制结果的不稳定性。
总的来说,在一阶倒立摆的控制中,各种方法都有自己的优缺点。
开发一种切实可行的控制方法需要考虑到各种因素,包括系统响应时间、控制稳定性、控制信号噪声干扰、成本等等。
因此,为了实现一
阶倒立摆的各种应用,需要有较为全面的控制方案和少量控制策略的
实践应用。
单级倒立摆三种控制方法的对比研究

单级倒立摆三种控制方法的对比研究一、本文概述倒立摆系统作为经典的控制理论实验平台,被广泛用于研究和验证各种控制算法的有效性。
单级倒立摆作为倒立摆系统中最简单的形式,其动态特性和控制难度适中,成为了许多学者研究的焦点。
本文将重点探讨三种常见的单级倒立摆控制方法,并通过对比分析,揭示各方法的优缺点以及在不同场景下的适用性。
本文将简要介绍单级倒立摆的基本结构和动力学特性,为后续控制方法的研究奠定基础。
随后,将详细介绍三种控制方法:PID控制、模糊控制和最优控制,并阐述各自的基本原理和实现过程。
在此基础上,本文将通过仿真实验和实物实验,对比三种控制方法在单级倒立摆稳定控制中的表现,评估其控制精度、响应速度和鲁棒性等方面的性能。
通过本文的研究,旨在为倒立摆控制领域的研究者提供有益的参考,并为实际工程应用中的控制策略选择提供理论支持。
也希望本文的研究能够推动倒立摆控制技术的发展,为智能控制领域的发展做出一定的贡献。
二、单级倒立摆系统概述单级倒立摆系统是一种典型的非线性、不稳定、不可控系统,是控制理论研究和教学实验中常用的典型实验对象。
该系统由一个支点、一个摆杆和一个小球组成,摆杆一端通过支点与地面相连,另一端固定一个小球。
小球受到重力作用,会自然下垂,而摆杆则可以在垂直平面内自由摆动。
当系统受到外部扰动时,小球会偏离平衡点,导致摆杆摆动,系统变得不稳定。
单级倒立摆系统的控制目标是通过施加一定的控制力,使小球能够稳定地倒立在摆杆顶端,即保持系统平衡。
由于该系统具有非线性、不稳定和不可控等特性,控制难度较大。
为了实现这一控制目标,需要设计合适的控制器,并采用合适的控制策略。
在单级倒立摆系统的控制中,常用的控制方法包括PID控制、模糊控制、神经网络控制等。
PID控制是一种基于误差反馈的控制方法,通过不断调整控制量来减小误差,使系统达到稳定状态。
模糊控制则是一种基于模糊逻辑的控制方法,通过模糊化输入和输出变量,实现对系统的非线性控制。
一级倒立摆的模糊控制

一级倒立摆的模糊控制一、 立题背景倒立摆( Inverted Pendulum)是处于倒置不稳定状态、通过人为控制使其处于动态平衡的一种摆。
它是一个复杂的快速、非线性、多变量、强耦合的非最小相位系统,是重心在上、支点在下控制问题的抽象。
倒立摆的控制一直是控制理论及应用的典型课题倒立摆系统通常用来检验控制策略的效果,是控制理论研究中较为理想的实验装置。
又因其与火箭飞行器及单足机器人有很大的相似之处,引起国内外学者的广泛关注。
控制过程中的许多关键问题,如镇定问题、非线性问题、鲁棒性问题、随动问题以及跟踪问题等都可以以倒立摆为例加以研究。
本文围绕一级倒立摆系统,采用模糊控制理论研究了倒立摆的控制系统仿真问题。
仿真 的成功证明了本文设计的模糊控制器有很好的稳定性。
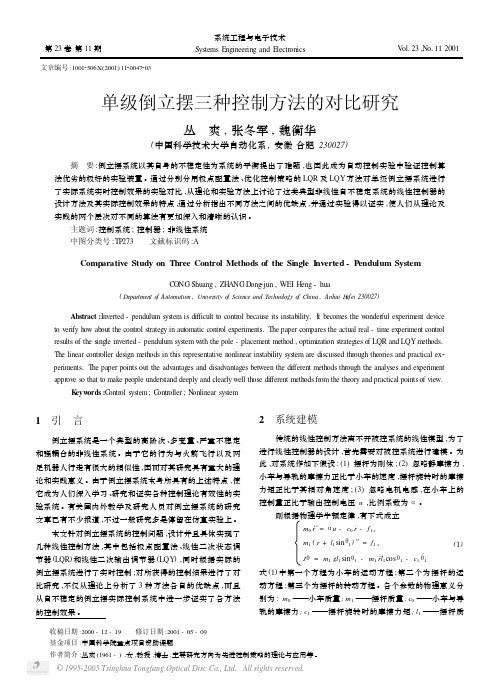
二、 倒立摆的数学模型质量为m 的小球固结于长度为L 的细杆(可忽略杆的质量)上,细杆又和质量为M 的小车铰接相连。
由经验知:通过控制施加在小车上的力F (包括大小和方向)能够使细杆处于θ=0的稳定倒立状态。
在忽略其他零件的质量以及各种摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型。
倒立摆模型如图2-1所示。
图 2-2 单机倒立摆模型图小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。
电机编码器和角编码器向运动卡反馈小车和摆杆位置(线位移和角位移)。
导轨截面成H 型,小车在轨道上可以自由滑动,其在轨道上的有效运行长度为1米。
轨道两端装有电气限位开关,以防止因意外失控而撞坏机构。
以摆角θ、角速度θ’、小车位移x 、加速度x ’为系统状态变量,Y 为输出,F 为输入 以摆角θ、角速度θ’、小车位移x 、加速度x ’为系统状态变量,Y 为输出,F 为输入。
即X=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x =⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x'x 'θθ Y=⎥⎦⎤⎢⎣⎡x θ=⎥⎦⎤⎢⎣⎡31x x由线性化后运动方程组得x1’=θ’=x2 x2’=''θ=()Ml g m M +x1-Ml1 F X3’ =x ’=x4 x4’=x ’’=-M mg x1+M 1 F 故空间状态方程如下:X ’=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡'4'3'2'1x x x x =()⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-+00010000000010M mgMl g m M ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x + ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-M Ml 1010 F Y= ⎥⎦⎤⎢⎣⎡31x x =⎥⎦⎤⎢⎣⎡01000001 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡4321x x x x + 0⨯F 其中,M=1 kg ,m=0.1kg ,l=.1m ,g=10m/s 。
(完整word版)一级倒立摆控制方法比较
(完整word版)一级倒立摆控制方法比较一级倒立摆控制方法比较摘要:倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的自然不稳定系统。
针对一级倒立摆系统,首先利用牛顿力学的知识建立了数学模型,然后利用Simulink 及其封装功能建立倒立摆的仿真模型,使模型更具灵活性,给仿真带来很大方便。
根据状态方程判断系统的能控、能观性。
通过LQR控制算法和极点配置设计控制器使系统达到稳定状态,分析两种方法的优缺点, 并利用Matlab仿真加以证实。
关键词:倒立摆; LQR ;极点配置;MatlabDISCUSSION ON CONTROLOF INVERTED PENDULUMAbstract:the inverted pendulum system is a typical multi—variable, nonlinear, strong coupling and rapid movement of the natural unstable system. According to the level of inverted pendulum system,firstI make use of Newtonian mechanics knowledge to establishthe mathematical model,and use the Simulink and packaging function to establish inverted pendulum simulation model。
The model is more flexibility, bringing a lot of convenience for simulation. By the equation of state, controllability and observablityof system can be sure。
直线一级倒立摆控制方法研究毕业论文

直线一级倒立摆控制方法研究毕业论文目录前言 (1)第1章倒立摆系统 (2)1.1 倒立摆的简介 (2)1.2 倒立摆的分类 (3)1.3 倒立摆的特性 (5)1.4 控制器的设计方法 (6)1.5 倒立摆系统研究的背景及意义 (6)1.6 直线倒立摆控制系统硬件框图 (8)第2章倒立摆的数学模型 (9)2.1 数学模型概述 (9)2.2 拉格朗日建模法 (9)2.3 倒立摆系统参数 (11)2.4 实际数学模型 (12)第3章MATLAB工具软件 (13)3.1 MATLAB简介 (13)3.2 SIMULINK仿真 (14)3.3 SIMULINK仿真建模方法 (15)第4章PID控制 (17)4.1 PID控制简述 (17)4.2 国内外的研究现状和发展趋势 (18)4.3 PID控制器设计 (20)4.4 PID控制器参数的整定 (21)第5章直线一级倒立摆的PID控制 (22)5.1 直线一级倒立摆的PID控制Simulink仿真 (22)5.2 直线一级倒立摆的PID仿真程序 (25)5.3 直线一级倒立摆的PID实时控制 (26)第6章直线一级倒立摆LQR控制 (29)6.1 线性二次最优控制LQR基本原理及分析 (29)6.2 LQR控制参数调节及仿真 (30)6.3 直线一级倒立摆LQR控制simulink仿真 (32)6.4 直线一级倒立摆LQR控制 (34)结论 (37)谢辞 (38)参考文献 (39)附录 (41)外文资料翻译 (45)MATLAB (45)MATLAB简介 (51)前言倒立摆是进行控制理论研究的典型实验平台。
由于倒立摆系统的控制策略和杂技运动员顶杆平衡表演的技巧有异曲同工之处,极富趣味性,而且许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来,因此在欧美发达国家的高等院校,它已成为必备的控制理论教学实验设备]2[。
直线一级倒立摆文档

0 0 1 0
0 I ml 2 ( M m) I mMl 2 B 0 ml 2 ( M m ) I mMl C I 44
带入参数得线性化后的系统参数矩阵为
1 0 0 0 0.0883167 0.629317 A 0 0 0 0 0.235655 27.8285
图. 4 Simulink 框图
图. 5 小车位置图
图. 6 摆杆与垂直方向角度图
Y轴
φ 摆杆 l F
X轴 小 X
图2
车
导轨
图 3 是将小车与摆杆分开受力分析的示意图。其中(a)图是小车的受力分析示意图, (b)图是摆杆的受力分析示意图。其中 N 和 P 分别为小车与摆杆相互作用的水平和垂直方 向的分量。执行装置的正方向由图. 2 所示的矢量方向确定。
P N F 小 (a)
图. 3 分析小车水平方向所受的合力,可以得到以下方程:
(3) (4)
cos ml 2 sin F bx ml (M m) x
分析摆杆垂直方向上的合力,可以得到下面的方程:
P mg m
即:
d2 (l cos 2 cos P mg ml
根据式(9)可得到如下的状态空间方程:
AX Bu X Y CX
其中
X x1
x2
x3
x4
T
1 0 ( I ml 2 )b 0 ( M m) I mMl 2 A 0 0 mlb 0 ( M m) I mMl 2
0 m 2l 2 g ( M m) I mMl 2 0 ( M m)mgl ( M m) I mMl 2
单级倒立摆三种控制方法的对比研究
(14)
其中 S 由下列 Ricatti 方程获得
GTS G - GTS H ( HTS H + Ry) - 1 HTS G + CTQy C = S (15) Qy , Ry 分别用来对输出向量 Y( k) ,控制向量 u ( k) 引起
的性能度量的相对重要性进行加权 。在实际系统的控制过程
中 , 我们取 Qy = 4 ×I2×2 ; Ry = 0. 5 , 根据式 (14) 和式 (15) ,设
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
第 11 期
单级倒立摆三种控制方法的对比研究
·49 ·
计出输出反馈增益矩阵为 Ky = [ - 2. 708 3 - 9. 702 0 - 4. 754 4 - 1. 139 98] (16)
= zn + αn3- 1 zn- 1 + … + α13 z1 + α03
(6)
Φ( A) = An + αn3- 1 An- 1 + … + α13 A1 + α03 I
Kp = (0 0 … 0 1) McΦ( A)
通过仿真及实际的控制经验 ,我们将实际闭环极点的配
置如下
z = [0. 990 0 - 0. 009 9 i 0. 990 0 + 0. 009 9 i
将对三种不同的线性控制器进行具体的设计 。
311 闭环状态反馈极点配置调节器 首 先 构 造 被 控 系 统 的 能 控 性 矩 阵 Mc =
[ H GH … Gn- 1 H ] ,通过计算可得 rank ( Mc) = 4 , 即系 统可控 。根据线性系统理论 , 可以设计状态反馈控制器将闭 环系统的极点配置在 S 域任意位置 。设极点配置的控制律 形式为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一级倒立摆控制方法比较摘要:倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的自然不稳定系统。
针对一级倒立摆系统,首先利用牛顿力学的知识建立了数学模型,然后利用Simulink 及其封装功能建立倒立摆的仿真模型,使模型更具灵活性,给仿真带来很大方便。
根据状态方程判断系统的能控、能观性。
通过LQR控制算法和极点配置设计控制器使系统达到稳定状态,分析两种方法的优缺点,并利用Matlab仿真加以证实。
关键词:倒立摆; LQR ;极点配置 ;MatlabDISCUSSION ON CONTROLOF INVERTED PENDULUM Abstract:the inverted pendulum system is a typical multi-variable, nonlinear, strong coupling and rapid movement of the natural unstable system. According to the level of inverted pendulum system, firstI make use of Newtonian mechanics knowledge to establishthe mathematical model, and use the Simulink and packaging function to establish inverted pendulum simulation model.The model is more flexibility, bringing a lot of convenience for simulation. By the equation of state, controllability and observablityof system can be sure. Designing the LQR control algorithm and pole-place makes the system stable state, analyzes the advantages and disadvantages of two methods confirmed through the simulation of MATLAB.Key words:Inverted pendulum ;LQR ;pole-place ;Matlab0引言倒立摆系统作为研究控制理论的一种典型的实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点。
研究倒立摆系统具有很强的理论意义,同时也具有深远的实践意义。
许多抽象的控制概念如稳定性、能控性和能观性,都可以通过倒立摆系统直观地表现出来。
希望对倒立摆的研究能够加深对控制理论的了解,为后面学习奠定坚实的基础。
倒立摆[1]的稳定控制主要可分为线性控制和智能控制两大类,下面分别对其归纳介绍。
1)线性理论控制方法应用线性控制方法的基本前提是倒立摆处在平衡点附近,偏移很小时,系统可以用线性模型来描述。
线性控制的典型代表有:PID 控制、状态反馈控制、LQR控制算法等。
2)智能控制方法智能控制融合了计算机科学、物理学、数学、脑科学、心理学、认知学、生物学等学科的思想,是自然学科与社会学科交叉渗透的方法。
它源自于人的实践经验,不需要精确的数学模型,是目前应用较广的控制方法。
在倒立摆的控制中用到的智能控制方法主要有神经网络控制、模糊控制、仿人智能控制、拟人智能控制、云模型控制和泛逻辑控制等[2-3]。
本论文采用LQR控制器和极点配置方法对一级倒立摆系统进行控制,主要工作如下:1、利用指导书中推导的模型和实际的参数,建立一级倒立摆的数学模型,并进行线性化;2、通过simulink建立仿真模型并进行封装;3、通过在matlab 编程中求取合适的反馈变量K,然后与仿真模型结合构成最优控制的一级倒立摆,通过图形分析是否满足系统的性能参数;4、选取合适的极点并通过图形分析是否满足系统的性能参数;5、最后比较这两种方法优缺点。
1一级倒立摆数学模型1.1数学模型推导对系统建立数学模型是系统分析、设计的前提,而一个准确有简练的数学模型将大大简化后期工作。
对于忽略空气阻力和各种摩擦之后,直线一级倒立摆系统抽象为小车和匀质杆组成的系统[4]。
图1 所示为一级倒立摆模型。
图1倒立摆小车和摆杆的受力分析应用Newton方法来建立系统的动力学方程如下:(1)分析小车水平方向受力情况M=F-b-N (1)(2)分析摆杆水平方向受力情况N=m22(sin)d yx ldxθ+(2)N=m+ml-ml sin(3)(3)把这式子(3)带入到(1),就得到(m+M)+b+ml-ml=F(4)(4)对摆杆垂直向上的力进行分析P-mg=ml(5)力矩平衡方程如下-Plsin(6) 将(6)与(5)合并消去P和N ,所得((7)根据文献[5],系统状态空间方程为:()()()()() ()()()()2222222222x xI ml b I mlm glx x uI M m Mml I M m Mml I M m Mmlmgl M mmlb mlx uI M m Mml I M m Mml I M m Mmlφφφφφ=-++ =++++++++ =+-=++++++++⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩表格 1本系统参数定义参数意义参数值M 小车质量0.5kgm 摆杆质量0.2kgb 小车摩擦系统0.1N/m/sl 摆杆转动轴心到杆质心的长度0.3mI 摆杆惯量0.006kg*m*mF 加在小车上的力x 小车位置Φ摆杆与垂直向上方向的夹角θ摆杆与垂直向下方向的夹角1.2系统仿真模型建立Simulink 是Matlab最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在该环境中,可以构造出复杂的仿真模型,下文根据倒立摆的数学模型,利用Simulink 的封装功能,构建了倒立摆系统仿真模型子系统[5]。
根据倒立摆的状态空间模型,在Matlab 中,用Simulink 构建一级倒立摆模块daolibai,具体步骤如下:(1)双击Matlab图标,启动Matlab,在工具栏中双击Simulink 图标启动Simulink 模块库浏览器窗口,然后再单击其工具栏中的新建(creat a new mode)图标,新建一个Simulink 模型窗口。
(2)从Simulink 模块库浏览器的菜单Simulink 的子菜单端口和子系统模块(Port & Subsystems)下选中子系统Subsystem,并用左键拖入到新建的Simulink 模型窗口中。
左击系统框图下字符串“Subsystem ”,删除后输入“daolibai”,实现子系统的重新命名。
(3)双击中的daolibai模块,从Port &Subsystems 下在拖出三个输出模块out,把一个输入模块和四个输出模块分别重新命名为:u和x、x '、a、a ' ,分别代表系统的输入向量u 和输出向量x、x’、ϕ、ϕ’。
(4)双击daolibai模块,然后从Simulink 下子菜单“用户自定义函数模块”(User-Defined Functions)中拖出Fcn子模块,单击Fcn子模块下的Fcn,删除Fcn重新命名为K1;再双击Fcn子模块并将对话框中的“Expression”中的内容修改为:[ −4 * b /( 4 * M + m1) ]*u,然后按OK,这就定义好了K1。
(5)重复步骤4)依次定义K2,K3,K4,K5,K6。
(6) 在窗口中再加入四个积分模块和两个加法模块,双击四个积分模块,把“Initial condition”下的内容分别修改为“init_cond(1)、init_cond(2)、init_cond(3)、init_cond(4)”。
它们表示倒立摆的系统的初始条件。
(7) 利用Simulink 的Mask 功能进行封装,封装后的模型如图3。
右击daolibai模块,选择Mask Subsystem(封装子系统)菜单,弹出子系统封装对话框,点击Parmeters标签,在参数对话框中,依次添加init_ cond、M、M 1、l、b 、g 等各参数变量(8)双击封装后的子系统,弹出模块的参数对话框,分别输入上述各参数变量的值,完成后如图2。
图2 倒立摆模型封装1.3系统性能分析1、稳定性分析①根据李雅普诺夫第一法线性定常系统Σ:(A,b,c)y=cx平衡状态Xe=0渐进稳定的充要条件是矩阵A的所有特征值均具有负实数。
%实际参数M=0.5;m=0.2;b=0.1;l=0.3;I=0.6;g=9.8;q=I*(M+m)+M*m*l^2;A=[0 1 0 0;0 -(I+m*l^2)*b/q m^2*g*l^2/q 0;0 001;0 -1*m*l*b/q-1*m*l*b m*g*l*(M+m)/q 0];b=[0(I+m*l^2)/qm*l/q0]';c=diag([1 1 1 1]);d=[0 0 0 0]';[V,t]=eig(A) %求A的特征值V =1.0000 -1.0000 -0.0613 0.06080 0.0044 0.0600 0.05950 0.0001 -0.7115 0.71200 -0.0000 0.6974 0.6970t =0 0 0 00 -0.0044 0 00 0 -0.9801 00 0 0 0.9789从t可知,A的特征值有非负值,因此系统不稳定2、能控性系统完全能控取决于状态方程(A,B)矩阵,因此对于完全能控的系统,通常称之为(A,B)完全能控。
通过构造Tc=[B,AB,..A n-1B] (n是系统的阶数),如果rank(Tc)=n,则称系统完全能控Tc=ctrb(A,b)Tc =0 0.0559 -0.0003 0.01150.0559 -0.0003 0.0115 -0.00010 0.1399 -0.0008 0.13420.1399 -0.0008 0.1342 -0.0009rank(Tc)ans = 4可见,因为Tc矩阵的秩为4,等于系统的阶数,所以系统完全可控。
3、能观性系统完全能观取决于状态方程(A,C)矩阵,因此对于完全能控的系统,通常称之为(A,C)完全能控。
通过构造To=[C,AC,..An-1C] T(n是系统的阶数),如果rank(To)=n,则称系统完全能观To=obsv(A,c)To =1.0000 0 0 00 1.0000 0 00 0 1.0000 00 0 0 1.00000 1.0000 0 00 -0.0056 0.0822 00 0 0 1.00000 -0.0140 0.9594 00 -0.0056 0.0822 00 0.0000 -0.0005 0.08220 -0.0140 0.9594 00 0.0001 -0.0012 0.95940 0.0000 -0.0005 0.08220 -0.0012 0.0789 -0.00050 0.0001 -0.0012 0.95940 -0.0134 0.9205 -0.0012rank(To)ans =4可见,因为To矩阵的秩为4,等于系统的阶数,所以系统完全可观。