人工智能实验 旅行商问题 启发式搜索
启发式搜索实验讲解
启发式搜索实验讲解实验三搜索推理技术启发式搜索算法—A*算法1.实验目的(1)了解搜索推理的相关技术;(2)掌握启发式搜索算法或者基于规则推理的分析方法。
2.实验内容(2个实验内容可以选择1个实现)(1)启发式搜索算法。
熟悉和掌握启发式搜索的定义、估价函数和算法过程,并求解博弈问题,理解求解流程和搜索顺序;(2)产生式系统实验。
熟悉和掌握产生式系统的运行机制,掌握基于规则推理的基本方法。
3.实验报告要求(1)简述实验原理及方法,并请给出程序设计流程图。
(A-Star)算法是一种静态路网中求解最短路最有效的直接搜索方法。
公式表示为:f(n)=g(n)+h(n),其中f(n) 是从初始点经由节点n到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n) 是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行,此时的搜索效率是最高的。
然后我们通过图文结合的形式来解释下,如下图:图中有这么几个要点先需要了解:1、类似迷宫图,分开始节点(start)、障碍物、结束节点(end),我们需要从start节点探寻一条到end节点的路线2、对于探寻的每一步,都会以当前节点为基点,扫描其相邻的八个节点3、计算当前节点与start节点及到end的距离4、计算出最短路径如果明白了上面的场景描述,下面就可以进行分析了。
在A*算法中,核心思想是一个公式,上面已经提到过:f(n)=g(n)+h(n) (2)源程序清单:package com.itxxz.ui.suanfa.astar;import java.util.Iterator;import java.util.LinkedList;import java.util.Queue;import com.itxxz.ui.suanfa.astar.Point;public class ItxxzAstar {// 开始节点private Point startPoint = null;// 当前节点private Point endPoint = null;// 结束节点private Point currentPoint = null;// 最短距离坐标节点private Point shortestFPoint = null;// 迷宫数组地图private static final int[][] mazeArray = {{ 1, 0, 0, 0, 0 },{ 1, 0, 2, 0, 0 },{ 1, 0, 0, 0, 1 },{ 1, 0, 0, 0, 0 },{ 1, 1, 1, 1, 0 },{ 1, 0, 0, 0, 0 },{ 3, 0, 1, 1, 1 } };// 迷宫坐标对象private Point[][] mazePoint = null;// 开启队列,用于存放待处理的节点Queue openQueue = null;// 关闭队列,用于存放已经处理过的节点Queue closedQueue = null;// 起始节点到某个节点的距离int[][] FList = null;// 某个节点到目的节点的距离int[][] GList = null;// 起始节点经过某个节点到目的节点的距离int[][] HList = null; /*** 构造函数** @param maze* 迷宫图* @param startPoint* 起始节点* @param endPoint* 结束节点*/public ItxxzAstar(Point[][] mazePoint, Point startPoint, Point endPoint) { this.mazePoint = mazePoint;this.startPoint = startPoint;this.endPoint = endPoint;openQueue = new LinkedList();openQueue.offer(startPoint);closedQueue = new LinkedList();FList = new int[mazePoint.length][mazePoint[0].length];GList = new int[mazePoint.length][mazePoint[0].length];HList = new int[mazePoint.length][mazePoint[0].length];for (int i = 0; i < mazePoint.length; i++) {for (int j = 0; j < mazePoint[0].length; j++) {FList[i][j] = Integer.MAX_V ALUE;GList[i][j] = Integer.MAX_V ALUE;HList[i][j] = Integer.MAX_V ALUE;}}// 起始节点到当前节点的距离GList[startPoint.getX()][startPoint.getY()] = 0;// 当前节点到目的节点的距离HList[startPoint.getX()][startPoint.getY()] = getPointDistance(startPoint.getX(), startPoint.getY(), endPoint.getX(),endPoint.getY());// f(x) = g(x) + h(x)FList[startPoint.getX()][startPoint.getY()] = GList[startPoint.getX()][startPoint .getY()] + HList[startPoint.getX()][startPoint.getY()];}/*** 计算当前坐标与结束坐标之间的距离** 计算方法为每向相信坐标移动一次算作一个距离单位**/private int getPointDistance(int current_x, int current_y, int end_x,int end_y) {return Math.abs(current_x - end_x) + Math.abs(current_y - end_y);}/*** 数组迷宫地图** 0、可通行1、障碍2、开始节点3、结束节点**/public static void main(String[] args) {// 创建节点迷宫图Point[][] mazePoint = new Point[mazeArray.length][mazeArray[0].length];for (int i = 0; i < mazePoint.length; i++) {for (int j = 0; j < mazePoint[0].length; j++) {mazePoint[i][j] = new Point(i, j, mazeArray[i][j]);}}Point start = mazePoint[1][2];Point end = mazePoint[6][0];ItxxzAstar star = new ItxxzAstar(mazePoint, start, end);star.start();System.out.println(mazeArray.length + "," + mazeArray[0].length);star.printPath();}/*** 开始迷宫搜索**/public void start() {while ((currentPoint = findShortestFPoint()) != null) {if (currentPoint.getX() == endPoint.getX()&& currentPoint.getY() == endPoint.getY())return;updateNeighborPoints(currentPoint);}}/*** 获取距离最短的坐标点**/public Point findShortestFPoint() {currentPoint = null;shortestFPoint = null;int shortestFValue = Integer.MAX_V ALUE;Iterator it = openQueue.iterator();while (it.hasNext()) {currentPoint = it.next();if (FList[currentPoint.getX()][currentPoint.getY()] <= shortestFValue) { shortestFPoint = currentPoint;shortestFValue = FList[currentPoint.getX()][currentPoint.getY()];}}if (shortestFValue != Integer.MAX_V ALUE) {System.out.println("【移除节点】:" + shortestFPoint.getValue() + "["+ shortestFPoint.getX() + ","+ shortestFPoint.getY() + "]");openQueue.remove(shortestFPoint);closedQueue.offer(shortestFPoint);}return shortestFPoint;}/*** 更新临近节点*/private void updateNeighborPoints(Point currentPoint) {int current_x = currentPoint.getX();int current_y = currentPoint.getY();System.out.println("当前节点:[" + current_x + "," + current_y + "]");// 上if (checkPosValid(current_x - 1, current_y)) {System.out.print("上");updatePoint(mazePoint[current_x][current_y],mazePoint[current_x - 1][current_y]);}// 下if (checkPosValid(current_x + 1, current_y)) { System.out.print("下");updatePoint(mazePoint[current_x][current_y], mazePoint[current_x + 1][current_y]);}// 左if (checkPosValid(current_x, current_y - 1)) { System.out.print("左");updatePoint(mazePoint[current_x][current_y], mazePoint[current_x][current_y - 1]);}// 右if (checkPosValid(current_x, current_y + 1)) { System.out.print("右");updatePoint(mazePoint[current_x][current_y], mazePoint[current_x][current_y + 1]);}System.out.println("---------------");}/*** 检查该节点是否有效**/private boolean checkPosValid(int x, int y) { // 检查x,y是否越界,并且当前节点不是墙if ((x >= 0 && x < mazePoint.length)&& (y >= 0 && y < mazePoint[0].length)&& (mazePoint[x][y].getValue() != 1)) {// 检查当前节点是否已在关闭队列中,若存在,则返回"false"Iterator it = closedQueue.iterator();Point point = null;while (it.hasNext()) {if ((point = it.next()) != null) {if (point.getX() == x && point.getY() == y)return false;}}return true;}return false;}/*** 更新当前节点*/private void updatePoint(Point lastPoint, Point currentPoint) {int last_x = lastPoint.getX();int last_y = lastPoint.getY();int current_x = currentPoint.getX();int current_y = currentPoint.getY();// 起始节点到当前节点的距离int temp_g = GList[last_x][last_y] + 1;// 当前节点到目的位置的距离System.out.print(" [" + current_x + "," + current_y + "]"+ mazePoint[current_x][current_y].getValue());int temp_h = getPointDistance(current_x, current_y, endPoint.getX(),endPoint.getY());System.out.println("到目的位置的距离:" + temp_h);// f(x) = g(x) + h(x)int temp_f = temp_g + temp_h;System.out.println("f(x) = g(x) + h(x) :" + temp_f + "=" + temp_g + "+"+ temp_h);// 如果当前节点在开启列表中不存在,则:置入开启列表,并且“设置”// 1) 起始节点到当前节点距离// 2) 当前节点到目的节点的距离// 3) 起始节点到目的节点距离if (!openQueue.contains(currentPoint)) {openQueue.offer(currentPoint);currentPoint.setFather(lastPoint);System.out.println("添加到开启列表:" + currentPoint.getValue() + "["+ currentPoint.getX() + "," + currentPoint.getY() + "]");// 起始节点到当前节点的距离GList[current_x][current_y] = temp_g;// 当前节点到目的节点的距离HList[current_x][current_y] = temp_h;// f(x) = g(x) + h(x)FList[current_x][current_y] = temp_f;} else {// 如果当前节点在开启列表中存在,并且,// 从起始节点、经过上一节点到当前节点、至目的地的距离< 上一次记录的从起始节点、到当前节点、至目的地的距离,// 则:“更新”// 1) 起始节点到当前节点距离// 2) 当前节点到目的节点的距离// 3) 起始节点到目的节点距离if (temp_f < FList[current_x][current_y]) {// 起始节点到当前节点的距离GList[current_x][current_y] = temp_g;// 当前节点到目的位置的距离HList[current_x][current_y] = temp_h;// f(x) = g(x) + h(x)FList[current_x][current_y] = temp_f;// 更新当前节点的父节点currentPoint.setFather(lastPoint);}System.out.println("currentPoint:" + currentPoint.getValue() + "["+ currentPoint.getX() + "," + currentPoint.getY() + "]");System.out.println("currentPoint.father:"+ currentPoint.getFather().getValue() + "["+ currentPoint.getFather().getX() + ","+ currentPoint.getFather().getY() + "]");}}/*** 打印行走路径**/public void printPath() {System.out.println("================ 开始打印行走路径【用8 表示】================");Point father_point = null;int[][] result = newint[mazeArray.length][mazeArray[0].length];for (int i = 0; i < mazeArray.length; i++) {for (int j = 0; j < mazeArray[0].length; j++) {result[i][j] = 0;}}int step = 0;father_point = mazePoint[endPoint.getX()][endPoint.getY()];while (father_point != null) {System.out.println("【father_point】" + father_point.getValue() + "["+ father_point.getX() + "," + father_point.getY() + "]");if (father_point.equals(startPoint))result[father_point.getX()][father_point.getY()] = 2;else if (father_point.equals(endPoint)) {result[father_point.getX()][father_point.getY()] = 3;step++;} else {result[father_point.getX()][father_point.getY()] = 8;step++;}father_point = father_point.getFather();}// 打印行走步数System.out.println("step is : " + step);for (int i = 0; i < mazeArray.length; i++) {for (int j = 0; j < mazeArray[0].length; j++) {System.out.print(result[i][j] + " ");}System.out.println();}}}(3)实验结果及分析。
智能优化-TSP-旅行商问题

智能优化实验报告基于遗传算法的TSP问题求解研究一、问题描述1、TSP问题的概述旅行商问题 (Traveling Salesman Problem,简称 TSP) 是一个经典的组合化问题。
它可以描述为:一个商品推销员要去若干个城市推销商品,从一个城出发需要经过所有城市后回到出发地,应如何选择行进路线以使总行程短。
从图论的角度看,该问题实质是在一个带权完全无向图中找一个权值最的小回路。
在寻找最短路径问题上,有时不仅要知道两个指定顶点间的最短路径,还需要知道某个顶点到其他任意顶点间的最短路径。
旅行商问题也是经典的组合数学的问题,生活中随处可见这类组合数学问题。
例如,计算下列赛制下的总的比赛次数:n个球队比赛,每队只和其他队比赛一次。
在纸上画一个网络,用铅笔沿着网络的线路走,在笔不离开纸面且不重复线路的条件下,一笔画出网络图。
一个邮递员从邮局出发,要走完他所管辖的街道,他应该选择什么样的路径,这就是著名的“中国邮递员问题”。
一个通调网络怎样布局最节省?美国的贝尔实验室和IBM公司都有世界一流的组合数学家在研究这个问题,这个问题直接关系到巨大的经济利益。
库房和运输的管理也是典型的组合数学问题,怎样安排运输使得库房充分发挥作用,进一步来说,货物放在什么地方最便于存取。
上述的这些例子中,其中一部分就和旅行商问题有关系。
2、TSP问题研究意义解决旅行商问题有着极其重要的理论和现实意义。
从理论层面来讲,解TSP不仅为其他算法提供了思想方法平台,使这些算法广泛地应用于各种组合优化问题;而且经常被用来测试算法的优劣,如模拟退火算法、禁忌搜索、神经网络、进化算法等,都可用旅行商问题来测试。
从实际应用层面来讲,旅行商问题作为一个理想化的问题,尽管多数的研究成果不是为了直接的应用,但却被广泛地转化为许多组合优化问题,最直接的就是其在交通、物流和大规模生产中的应用。
3、TSP问题的解决TSP问题是诸多领域内出现的多种复杂问题的集中概括和简化形式。
浅谈人工智能中的启发式搜索策略

蚁群算法
总结词
模拟蚂蚁觅食过程的群体智能优化算法
详细描述
蚁群算法是一种模拟蚂蚁觅食过程的群体智能优化算法,通过模拟蚂蚁的信息素传递过程,逐渐建立起最优路 径。其优点在于能够在复杂环境中寻找到最优解,适用于解决组合优化问题,如旅行商问题、图的着色问题等 。
粒子群优化算法
总结词
模拟鸟群、鱼群行为的全局优化算法
人工智能的未来趋势
未来人工智能的发展将更加注重跨学科融合,包括计算机科 学、心理学和哲学等多个领域,同时人工智能的应用也将更 加广泛和深入,涉及的领域也将更加广泛和多样化。
03
启发式搜索策略简介
启发式搜索的定义与特点
定义
启发式搜索是一种基于人类认知和解决问题的启发式方 法的搜索策略,它通过利用一些特定的提示或启发式信 息来指导搜索方向,从而减少搜索的盲目性和无序性, 提高搜索效率。
展望未来-启发式搜索策略在人工智 能中的发展前景
基于启发式搜索的混合优化算法
总结词
结合了启发式搜索策略和混合算法的优化方 法,能够处理复杂的多变量优化问题,提高 搜索效率。
详细描述
混合优化算法是一种结合了不同优化技术的 算法,旨在解决单一方法无法有效处理的复 杂问题。启发式搜索策略为混合算法提供了 重要的启示,通过混合启发式搜索策略和传 统优化算法,可以更好地处理多变量优化问
题,提高搜索效率。
基于启发式搜索的多目标优化算法
总结词
利用启发式搜索策略处理多目标优化问题 ,能够同时满足多个优化目标,提高整体 优化效果。
VSBiblioteka 详细描述多目标优化问题是一种需要同时满足多个 优化目标的复杂问题。传统的优化算法往 往难以同时满足所有目标,而启发式搜索 策略可以提供一种有效的解决方案。通过 结合启发式搜索策略和多目标优化算法, 可以更好地解决这类问题,提高整体优化 效果。
人工智能实验总结
总结
宽度优先搜索法
在有解的情形总能保证搜索到最短路经,也 就是移动最少步数的路径。但宽度优先搜索法的 最大问题在于搜索的结点数量太多,因为在宽度 优先搜索法中,每一个可能扩展出的结点都是搜 索的对象。随着结点在搜索树上的深度增大,搜 索的结点数会很快增长,并以指数形式扩张,从 而所需的存储空间和搜索花费的时间也会成倍增 长。
1 2
0 1 0 1
0 0 1 1
0 1 1 0
神经网络设计
用两层神经网络来实现,其中隐层为随机 感知器层(net1),神经网络元数目设计为 3,其权值和阈值是随机的,它的输出作为 输出层(分类层)的输入;输出层为感知 器层(net2),其神经元数为1,这里仅对 该层进行训练。
程序运行结果
随机感知器层的权值向量 iw1 = 0.4267 -0.6556 -0.5439 0.9376 -0.1007 -0.2886 随机感知器层的阈值向量 b1 = 0.4074 0.0441 0.8658
运行结果分析
上面实验结果可以看出,城市数目为30的 时候,当迭代次数为100,算法收敛慢,在 迭代次数内最优解没有达到稳定,没有搜 索到最好的解。 迭代次数为200和250的时候,算法基本达 到收敛,最优解在100代以后趋于稳定,表 明搜索到问题的最优解。
运行结果
当城市数目改变的时候: CityNum=50;最大代数gnmax=100;
程序运行结果
第二层感知器层的权值向量和阈值向量 iw2 = -3 -2 2 b2 = 2
第二章人工智能搜索问题
8 3 283
214 714
765 6 5
S13
S14
83 214 765
S21
813 24 765
S22
23 184 765
S7
23 184 765
S8
28 143 765
S9
283 145 76
S10
123 84
765 S15
234 18 765
S16
28 143 765
S17
283 145 76
缺点:
不完备,也不最优
1
2
6
12
4
7
13
9 58
10 1····1
回溯搜索策略
回溯策略属于深度优先 搜索的一种变形
与深度优先搜索的区别:
扩展一个节点时,每次
只产生一个后继节点,
而不是全部后继
3
回溯策略只保存单一的 解路径,占用内存空间 很少,只需要一张表即 可完成搜索
1
2
6
12
4
7
13
9 58
它并不考虑结果的可能位置,彻底地搜索整张 图,直到找到结果为止。
宽度优先搜索
广度优先搜索算法:
步1 把初始节点S0放入OPEN 步2 若OPEN表为空, 则搜索失败,退出。 步3 取OPEN表中前面第一个节点N放在CLOSED表中, 并冠以
顺序编号n 步4 若目标节点Sg= N,则搜索成功, 结束。 步5 若N不可扩展, 则转步2 步6 扩展N, 将其所有子节点配上指向N的指针依次放入OPEN
人工智能
第二章 搜索问题
本章的内容与目标
搜索与搜索问题 搜索问题的求解步骤 无信息(盲目)搜索 有信息(启发式)搜索
人工智能概论-搜索算法编程及实验报告
人工智能概论大作业学院:电子工程学院专业:智能科学与技术题目一:搜索算法编程及实验报告一.算法题目八数码难题的求解。
二.实验目的从盲目搜索和启发式搜索方法中分别选择一种解决八数码难题,给出搜索树和从起始节点到目标节点的路径。
三.实验设备及软件环境Win7的笔记本电脑,VS2013(使用c语言编程)。
四.实验方法1.盲目搜索——宽度优先搜索。
(1).算法描述如果搜索是以接近其实节点的程度来依次扩展节点,那么这中搜索就叫宽度优先搜索。
这种搜索是逐层进行的,在对下一层的任一节点进行搜索之前,必须搜索完本层的所有节点。
(1)把起始节点放到OPEN表中(如果该起始节点为一目标节点,则求得一个解答)。
(2)如果OPEN是个空表,则没有解,失败退出;否则继续。
(3)把第一个节点(节点 n)从OPEN表移出,并把它放入CLOSED扩展节点表中。
(4)扩展节点n。
如果没有后继节点,则转向上述第(2)步。
(5)把n 的所有后继节点放到OPEN表的末端,并提供从这些后继节点回到n的指针。
(6)如果n 的任一个后继节点是个目标节点,则找到一个解答,成功退出;否则转向第(2)步。
(2).算法流程图(3).程序代码#include "stdio.h"#include "conio.h"#include "string.h" struct pic{char data[10];char imoperate;int father;char extend; };char end[10] = "1238 4765";int result[100];int n;int m;pic base[100];char *w;int find(int x){for (int i = 0; i < 10; i++)if (base[x].data[i] != end[i])return 0;return 1;}void showline(int x){int i = 0;while (base[x].father != -1){result[i] = x;x = base[x].father;i++;}result[i] = 0;result[i + 1] = '\0';m = i;printf("\n搜索路径");for (i = m; i >= 0; i--){printf("\n\n\n");printf("%c\t%c\t%c\n", base[result[i]].data[0], base[result[i]].data[1], base[result[i]].data[2]);printf("%c\t%c\t%c\n", base[result[i]].data[3], base[result[i]].data[4], base[result[i]].data[5]);printf("%c\t%c\t%c", base[result[i]].data[6], base[result[i]].data[7], base[result[i]].data[8]);}}int left(int x){int i;for (i = 0; i < 10; i++)if (base[x].data[i] == ' ')break;if (i == 0 || i == 3 || i == 6)return 0;for (int j = 0; j < 10; j++)base[n].data[j] = base[x].data[j];base[n].data[i] = base[x].data[i - 1];base[n].father = x;base[n].imoperate = 'R';base[n].extend = 'Y';base[x].extend = 'N';w = base[n].data;n++;if (find(n - 1) == 1)return 1;}int right(int x){int i;for (i = 0; i < 10; i++)if (base[x].data[i] == ' ')break;if (i == 2 || i == 5 || i == 8)return 0;for (int j = 0; j < 10; j++)base[n].data[j] = base[x].data[j];base[n].data[i + 1] = base[x].data[i];base[n].father = x;base[n].imoperate = 'L';base[n].extend = 'Y';base[x].extend = 'N';w = base[n].data;n++;if (find(n - 1) == 1)return 1;}int up(int x){int i;for (i = 0; i < 10; i++)if (base[x].data[i] == ' ')break;if (i == 0 || i == 1 || i == 2)return 0;for (int j = 0; j < 10; j++)base[n].data[j] = base[x].data[j];base[n].data[i - 3] = base[x].data[i];base[n].data[i] = base[x].data[i - 3];base[n].father = x;base[n].imoperate = 'D';base[n].extend = 'Y';base[x].extend = 'N';w = base[n].data;n++;if (find(n - 1) == 1)return 1;}int down(int x){int i;for (i = 0; i < 10; i++)if (base[x].data[i] ==' ')break;if (i == 6 || i == 7 || i == 8)return 0;for (int j = 0; j < 10; j++)base[n].data[j] = base[x].data[j];base[n].data[i + 3] = base[x].data[i];base[n].data[i] = base[x].data[i + 3];base[n].father = x;base[n].imoperate = 'U';base[n].extend = 'Y';base[x].extend = 'N';w = base[n].data;n++;if (find(n - 1) == 1)return 1;}void main(){void showtree(int x);n = 1;int i;strcpy_s(base[0].data, "2831 4765");base[0].imoperate = 'N';base[0].father = -1;base[0].extend = 'Y';for ( i = 0; i < 100; i++){if (base[i].extend == 'Y'){if (base[i].imoperate == 'L'){if (right(i) == 1)break;if (up(i) == 1)break;if (down(i) == 1)break;continue;}if (base[i].imoperate == 'R') {if (left(i) == 1)break;if (up(i) == 1)break;if (down(i) == 1)break;continue;}if (base[i].imoperate == 'U') {if (left(i) == 1)break;if (right(i) == 1)break;if (down(i) == 1)break;continue;}if (base[i].imoperate == 'D') {if (right(i) == 1)break;if (up(i) == 1)break;if (left(i) == 1)break;continue;}if (base[i].imoperate == 'N') {if (left(i) == 1)break;if (right(i) == 1)break;if (up(i) == 1)break;if (down(i) == 1)break;continue;}}}printf("搜索结束\n");showline(n - 1);showtree(n - 1);getchar();}void showtree(int x){printf("\n\n\n搜索树\n\n\n");int i;for (i = 0; i <= x; i++){if (i == 0){printf("\t\t\t %c%c%c\n", base[i].data[0], base[i].data[1], base[i].data[2]);printf("\t\t\t %c%c%c\n", base[i].data[3], base[i].data[4], base[i].data[5]);base[i].data[7], base[i].data[8]);printf("\t\t\t |\n");printf(" ");for (int j = 0; j < 49; j++)printf("-");printf("\n");printf(" |");printf(" |");printf(" |");printf(" |\n");continue;}if (i>0 && i <= 4){printf(" %c%c%c", base[i].data[0],base[i].data[1], base[i].data[2]);printf("\t %c%c%c", base[i+1].data[0], base[i+1].data[1], base[i+1].data[2]);printf("\t %c%c%c", base[i+2].data[0], base[i+2].data[1], base[i+2].data[2]);printf("\t %c%c%c\n", base[i+3].data[0], base[i+3].data[1], base[i+3].data[2]);printf(" %c%c%c", base[i].data[3],base[i].data[4], base[i].data[5]);base[i+1].data[4], base[i+1].data[5]);printf("\t %c%c%c", base[i+2].data[3], base[i+2].data[4], base[i+2].data[5]);printf("\t %c%c%c\n", base[i+3].data[3], base[i+3].data[4], base[i+3].data[5]);printf(" %c%c%c", base[i].data[6],base[i].data[7], base[i].data[8]);printf("\t %c%c%c", base[i+1].data[6], base[i+1].data[7], base[i+1].data[8]);printf("\t %c%c%c", base[i+2].data[6], base[i+2].data[7], base[i+2].data[8]);printf("\t %c%c%c\n", base[i+3].data[6], base[i+3].data[7], base[i+3].data[8]);printf(" |");printf(" |");printf(" |");printf(" |\n");printf(" ---------");printf(" ---------");printf(" ---------");printf(" ---------\n");printf(" | |");printf(" | |");printf(" | |");printf(" | |\n");i = 4;continue;}if (i > 4 && i <= 12){printf(" %c%c%c", base[i].data[0], base[i].data[1], base[i].data[2]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i+j].data[0],base[i+j].data[1], base[i+j].data[2]);printf("\n %c%c%c", base[i].data[3],base[i].data[4], base[i].data[5]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i + j].data[3], base[i + j].data[4], base[i + j].data[5]);printf("\n %c%c%c", base[i].data[6],base[i].data[7], base[i].data[8]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i + j].data[6], base[i + j].data[7], base[i + j].data[8]);printf("\n | |");printf(" | |");printf(" | |");printf(" | |\n");i = 12;continue;}if (i > 12 && i <= 20){printf(" %c%c%c", base[i].data[0], base[i].data[1], base[i].data[2]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i + j].data[0], base[i + j].data[1], base[i + j].data[2]);printf("\n %c%c%c", base[i].data[3],base[i].data[4], base[i].data[5]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i + j].data[3], base[i + j].data[4], base[i + j].data[5]);printf("\n %c%c%c", base[i].data[6],base[i].data[7], base[i].data[8]);for (int j = 1; j < 8; j++)printf(" %c%c%c", base[i + j].data[6], base[i + j].data[7], base[i + j].data[8]);printf("\n | |");printf(" | |");printf(" | |");printf(" | |\n");printf(" -----");for (int j = 0; j < 7;j++)printf(" -----");printf("\n | |");for (int j = 0; j < 7; j++)printf(" | |");i = 20;continue;}if (i>20 && i <= 36){printf("\n%c%c%c", base[i].data[0], base[i].data[1], base[i].data[2]);for (int j = 1; j < 11; j++)printf(" %c%c%c", base[i + j].data[0], base[i + j].data[1], base[i + j].data[2]);printf("\n%c%c%c", base[i].data[3], base[i].data[4], base[i].data[5]);for (int j = 1; j < 11; j++)printf(" %c%c%c", base[i + j].data[3], base[i + j].data[4], base[i + j].data[5]);printf("\n%c%c%c", base[i].data[6], base[i].data[7], base[i].data[8]);for (int j = 1; j < 11; j++)printf(" %c%c%c", base[i + j].data[6], base[i + j].data[7], base[i + j].data[8]);i = 36;continue;}}}2.启发式搜索——有序搜索(1)算法描述有序搜索又称最好优先搜索,他总是选择最有希望的节点作为下一个要扩展的节点。
浅谈人工智能中的启发式搜索策略
启发式搜索策略的常见算法
Dijkstra算法
Dijkstra算法也是一种常见的启发式搜索算法,它主要用于解决带权图的最短路径问题。该算法通过不断扩展当前节点,并使用启发式函数来更新每个节点的距离。
Bellman-Ford算法
Bellman-Ford算法是一种解决动态规划问题的启发式搜索算法,它通过迭代更新每个节点的距离来找到最短路径。与Dijkstra算法不同的是,Bellman-Ford算法可以处理带有负权边的图。
02
它将问题分解为若干个状态,并从初始状态开始搜索,通过不断迭代,寻找目标状态。
03
在每个迭代过程中,启发式搜索策略会评估当前状态到目标状态的代价,并选择最小代价的状态进行扩展,直到找到目标状态或确定无法找到目标状态。
A*算法
A*算法是一种广泛使用的启发式搜索算法,它通过使用启发式函数来评估每个状态的代价,并选择最小代价的状态进行扩展。
xx年xx月xx日
浅谈人工智能中的启发式搜索策略
引言启发式搜索策略的基本概念与原理启发式搜索策略在人工智能中的应用启发式搜索策略的优缺点分析未来展望与研究方向结论
contents
目录
引言
01
人工智能(Artificial Intelligence,简称 AI)是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。
鼓励探索该算法在实际应用场景中的应用价值和可能性
THANKS
谢谢您的观看
定义
AI 技术正在改变人类的生活方式和社会结构,应用在各个领域如医疗、金融、交通、制造等,帮助人们解决复杂的问题和提高效率。
重要性
人工智能的定义与重要性
VS
启发式搜索策略是一种基于问题特定的信息搜索策略,它利用问题特定的知识来指导搜索方向,从而减少搜索范围,提高搜索效率。
人工智能教程习题及答案第5章习题参考解答
第五章搜索策略习题参考解答5.1 练习题5.1 什么是搜索?有哪两大类不同的搜索方法?两者的区别是什么?5.2 用状态空间法表示问题时,什么是问题的解?求解过程的本质是什么?什么是最优解?最优解唯一吗?5.3 请写出状态空间图的一般搜索过程。
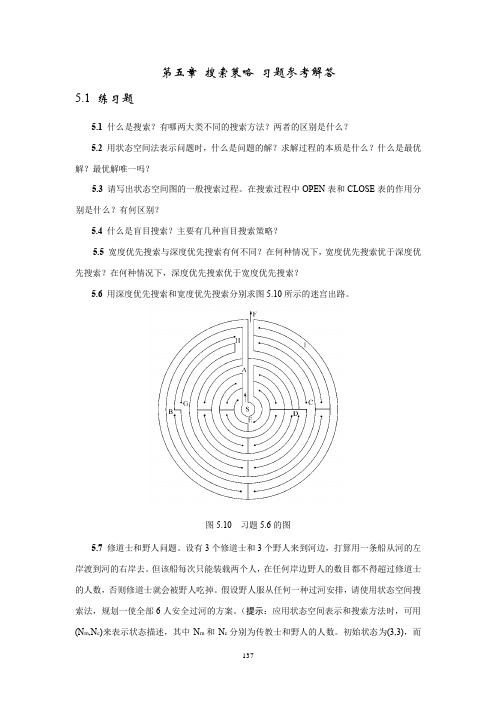
在搜索过程中OPEN表和CLOSE表的作用分别是什么?有何区别?5.4 什么是盲目搜索?主要有几种盲目搜索策略?5.5 宽度优先搜索与深度优先搜索有何不同?在何种情况下,宽度优先搜索优于深度优先搜索?在何种情况下,深度优先搜索优于宽度优先搜索?5.6 用深度优先搜索和宽度优先搜索分别求图5.10所示的迷宫出路。
图5.10 习题5.6的图5.7 修道士和野人问题。
设有3个修道士和3个野人来到河边,打算用一条船从河的左岸渡到河的右岸去。
但该船每次只能装载两个人,在任何岸边野人的数目都不得超过修道士的人数,否则修道士就会被野人吃掉。
假设野人服从任何一种过河安排,请使用状态空间搜索法,规划一使全部6人安全过河的方案。
(提示:应用状态空间表示和搜索方法时,可用(N m,N c)来表示状态描述,其中N m和N c分别为传教士和野人的人数。
初始状态为(3,3),而可能的中间状态为(0,1),(0,2),(0,3), (1,1),(2,1),(2,2),(3,0),(3,1),(3,2)等。
)5.8 用状态空间搜索法求解农夫、狐狸、鸡、小米问题。
农夫、狐狸、鸡、小米都在一条河的左岸,现在要把它们全部送到右岸去。
农夫有一条船,过河时,除农夫外,船上至多能载狐狸、鸡和小米中的一样。
狐狸要吃鸡,鸡要吃小米,除非农夫在那里。
试规划出一个确保全部安全的过河计划。
(提示:a.用四元组(农夫,狐狸,鸡,米)表示状态,其中每个元素都可为0或1,0表示在左岸,1表示在右岸;b.把每次过河的一种安排作为一个算符,每次过河都必须有农夫,因为只有他可以划船。
)5.9 设有三个大小不等的圆盘A 、B 、C 套在一根轴上,每个圆盘上都标有数字1、2、3、4,并且每个圆盘都可以独立地绕轴做逆时针转动,每次转动90°,初始状态S 0和目标状态S g 如图5.11所示,用宽度优先搜索法和深度优先搜索法求从S 0到S g 的路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
人工智能实验2 旅行商问题
实验课名称:人工智能原理与应用
实验项目名称:旅行商问题
专业名称:计算机科学与技术(交通信息)
班级:24020804
学号:2402080423
学生姓名:邢洪伟
教师姓名:慕晨
2010年12月20日
一、实验名称:旅行商问题
二、实验目的:用OPEN 表和CLOSED 表解决搜索问题 三、实验要求:
1、必须使用OPEN 表和CLOSED 表
2、明确给出问题描述、系统初始状态、目标状态和启发式函数
3、除了初始状态以外,至少搜索四层
4、给出解路径(解图)
四、实验原理:启发式搜索。
其基本思想是优先扩展路径耗散最小的节点,对于任意节点n ,用f(n)来表示n 到初始节点的路径耗散,即代价。
五、 实验内容:旅行商问题 1.问题描述
设西安、太原、北京、济南、郑州、南京、重 庆、武汉、上海、杭州十个城市,旅行者从西安 出发,到达城市上海,路径长度如下图图所示, 走怎样的路线路径最短?
2.启发式函数:f(n)=h(n)
其中h(n)表示相邻两城市间的路径长度 3.实验实现:
西安8
太原9 重庆7 郑州 5 武汉5.5
北京 8 武汉5.5 济南4.5 南京2 杭州 1.5
上海
西安
郑州
上海
北京
太原
武汉南京
杭州
重庆济南
OPEN 表
CLOSED 表
六、 实验体会:
通过本次用OPEN 表和CLOSED 表解决搜索问题的实验,让我对启发式搜索有了进一步的了解。
启发式搜索,也称为有信息搜索,借助问题的特定知识来帮助选择搜索方向;在搜索过程中对待扩展的每一个节点进行评估,得到最好的位置,再从这个位置进行搜索直到目标。
本次实验中采用的启发式函数为f(n)=h(n),巧妙地利用了旅行费最少这一点,使得搜索变得简单。