接触网腕臂计算
接触网腕臂测量数据探讨
接触网腕臂测量数据探讨作者:魏博来源:《科技资讯》2012年第01期接触网腕臂作为弓网系统中的重要组成部分,其本身的优劣可以影响到整个弓网系统,重要性不言而喻。
目前国内铁路工程接触网腕臂是利用现场测量数据,并结合设计资料,通过专业软件计算得出。
其中现场测量数据的正确性和准确性,决定了腕臂计算结果的合理性。
本文着重对铁路工程接触网腕臂计算流程中的现场测量数据进行简要的探讨。
1接触网腕臂设计目前在国外,日本新干线、我国台湾、法国高铁、韩国高铁接触网采用钢腕臂及定位系统,德国及西班牙高铁接触网采用铝合金腕臂及定位系统。
我国国内主要以传统钢腕臂结构为主,近几年随着客运专线的建设,铝合金腕臂及定位系统也开始广泛使用。
对比两种材质的腕臂。
铝合金腕臂系统重量轻、美观性能好,但铝合金零部件大多采用铸造工艺生产,少量采用锻造工艺,其产品加工难度大,成品率低,工程造价较高,钢腕臂系统采用无缝钢管,连接零件采用钢材锻造、冲压或焊接而成,零部件加工难度小、质量稳定,同时关键受力节点采用螺栓连接,区别于铝合金系统的摩擦副连接,系统结构强度更好,更加安全可靠。
对大风等恶劣气候适应性更强。
从整体结构上对比中国传统钢腕臂结构、高速铝合金和日式钢腕臂结构,三者都是三角腕臂结构,主要差别有三点:一是平腕臂和斜腕臂连接方式不同;二是定位管形式;三是定位器形式。
本文以铝合金腕臂及定位系统为研究对象,腕臂支持装置一般采用绝缘旋转全腕臂结构形式,为水平腕臂与斜腕臂组成的平腕臂三角形结构,采用承力素座固定承力素,斜腕臂与水平腕臂间加设腕臂支撑。
就目前国内铁路接触网腕臂系统,主要的腕臂结构形式有正定位腕臂结构形式、反定位腕臂结构形式和非工作锚支定位腕臀结构形式。
2接触网腕臂计算2.1计算流程铁路工程接觚网腕臂计算流程如图1所示。
从流程图中可以清晰的看出,在整个接触网腕臂的计算过程中,现场测量数据是整个计算过程的控制点,测量数据的正确性和准确性,决定了接触网腕臂计算结果的准确性。
接触网腕臂计算模型
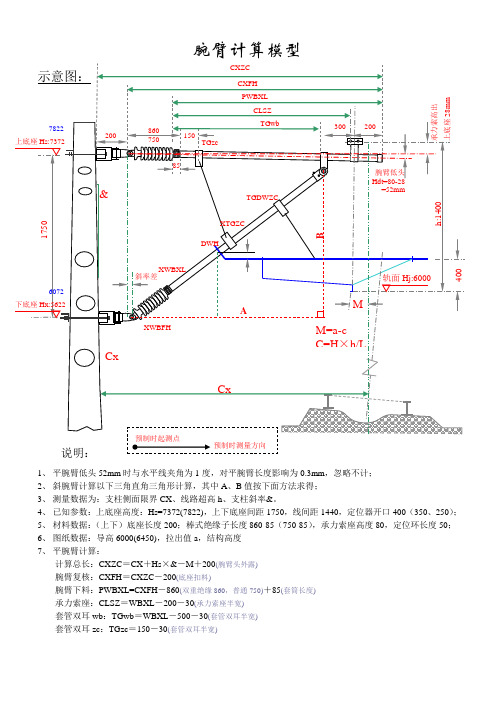
腕臂计算模型1、平腕臂低头52mm时与水平线夹角为1度,对平腕臂长度影响为0.3mm,忽略不计;2、斜腕臂计算以下三角直角三角形计算,其中A、B值按下面方法求得;3、测量数据为:支柱侧面限界CX、线路超高h、支柱斜率&。
4、已知参数:上底座高度:Hs=7372(7822),上下底座间距1750,线间距1440,定位器开口400(350、250);5、材料数据:(上下)底座长度200;棒式绝缘子长度860-85(750-85),承力索座高度80,定位环长度50;6、图纸数据:导高6000(6450),拉出值a,结构高度7、平腕臂计算:计算总长:CXZC=CX+Hs×&-M+200(腕臂头外露)腕臂复核:CXFH=CXZC-200(底座扣料)腕臂下料:PWBXL=CXFH-860(双重绝缘860,普通750)+85(套筒长度)承力索座:CLSZ=WBXL-200-30(承力索座半宽)套管双耳wb:TGwb=WBXL-500-30(套管双耳半宽)套管双耳zc:TGzc=150-30(套管双耳半宽)8、斜腕臂计算:直角边A:A=TGwb+30(套管双耳半宽)+860(双重绝缘860,普通750)-85(套筒长度)-1.75&(斜率差)直角边B:B=1750(底座间距)-50(此处腕臂低头折算值)-80(套管双耳扣料长度)斜腕臂复核长度:XWBFH=SQRT(A^2+B^2)斜腕臂下料长度:XWBXL=XWBFH-860+85定位环位置:DWH=(6000+400-5622)×XWBFH÷A-860+85腕臂支持套管双耳位置:XTGZC= XWBXL -TGwb+150+85定位管支持套管双耳位置:TGDWZC= XTGZC+410(定位管支撑长度)+80(套管双耳扣料长度)9、定位管上计算:正定位定位管长度:ZDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+600(防风拉线长度)+200(定位管外露长度)反定位定位管长度:FDWGC=CX+5.622&-M-(6000+400-5622)×A÷B-200(底座扣料)-50(定位环扣料)+1200(1050定位器长度)+200(定位管外露长度)正定位管上定位环位置:ZGSDWH=ZDWGC-1200(1050定位器长度)-600-200反定位管上定位环位置:FGSDWH=FDWGC-200正定位防风拉线定位环位置:ZFFDWH= ZGSDWH-200正定位防风拉线定位环位置:FFFDWH= FGSDWH-1200(1050定位器长度)-600-200。
浅谈接触网腕臂计算中常被遗忘的点

浅谈接触网腕臂计算中常被遗忘的要点众所周知,腕臂计算是接触网三大计算之一,应用很普遍也很重要,但其中总有一些细小的问题,值得大家注意和商榷,以提高计算精度和准确性,避免在计算环节出错、造成大量材料和人力浪费。
下面结合兰新线电气化改造工程北疆线段内乌北—乌东区间腕臂计算,谈谈自己的认识:1. 平腕臂计算时斜率不容忽视,即使是等径支柱也不例外,因为不可能保持所有支柱都中心直立,总有内倾和外倾,所以要引起我们的认识;钢柱肯定有斜率。
斜率是指同一侧柱顶边缘与柱底边缘的距离与柱身外露的比值,单位为mm/m,有内倾和外倾之分导致斜率有正负之分。
当将斜率反应到上底座安装高度时,即计算平腕臂时,要将斜率乘以上底座安装高度才能真实反应出此处偏移值。
2.腕臂上底座安装高度Hs不容有错误,一般取上底座中心线距轨面的距离。
因为根据三角形相似原理,高度不同,斜率一定,高度越高,偏移值越大。
3.平腕臂计算公式:PWBZC=Cx+Hs*&-M+200,其中M=a-c 正定位用M=c-a 反定位用公式c=H*h/L其中a---表示拉出值Cx---表示侧面限界Hs---表示上底座安装高度&---表示斜率4.套管双耳有厚度,不容忽略,不能直接将腕臂上下底座高度差值代入勾股定理,但一定要将腕臂管厚度减去后代入,只有这样斜腕臂长度才有保证。
5.扣料时一定分清楚单绝缘还是双绝缘,还有亲自复核棒式绝缘子长度和套筒长度。
因为绝缘子的长度是不同的,就乌北—乌东区间而言双重绝缘子平棒瓷为850,斜棒瓷只有760。
6.定位环位置要依据导高、超高,定位管开口确定。
公式为:定位环位置=(导高+开口高度-下底座中心线)*(斜腕臂长+斜棒瓷)/(承力索位置+平棒瓷)--斜棒瓷场+90(余量)7.为了保证计算的精确度,计算时一般多保留几位小数,不因超高值小或者斜率小而舍弃。
8.平腕臂扣料时从平腕臂销钉口中心起测,斜腕臂扣料时不忘与棒式绝缘子接触的部分,留够余量,一般电子表格误差也才此处产生。
接触网腕臂测量数据探讨

接触网腕臂测量数据探讨摘要:现场测量数据是接触网腕臂系统计算的控制环节。
在整个计算流程中,要有专门的环节控制测量数据的正确性与准确性,以确保计算结果的合理性。
本文针对铁路工程,对控制整个计算流程的现场测量中的几个关键数据进行了探讨。
关键词:腕臂系统测量数据关键数据接触网腕臂作为弓网系统中的重要组成部分,其本身的优劣可以影响到整个弓网系统,重要性不言而喻。
目前国内铁路工程接触网腕臂是利用现场测量数据,并结合设计资料,通过专业软件计算得出。
其中现场测量数据的正确性和准确性,决定了腕臂计算结果的合理性。
本文着重对铁路工程接触网腕臂计算流程中的现场测量数据进行简要的探讨。
1 接触网腕臂设计目前在国外,日本新干线、我国台湾、法国高铁、韩国高铁接触网采用钢腕臂及定位系统,德国及西班牙高铁接触网采用铝合金腕臂及定位系统。
我国国内主要以传统钢腕臂结构为主,近几年随着客运专线的建设,铝合金腕臂及定位系统也开始广泛使用。
对比两种材质的腕臂,铝合金腕臂系统重量轻、美观性能好,但铝合金零部件大多采用铸造工艺生产,少量采用锻造工艺,其产品加工难度大,成品率低,工程造价较高;钢腕臂系统采用无缝钢管,连接零件采用钢材锻造、冲压或焊接而成,零部件加工难度小、质量稳定,同时关键受力节点采用螺栓连接,区别于铝合金系统的摩擦副连接,系统结构强度更好,更加安全可靠,对大风等恶劣气候适应性更强。
从整体结构上对比中国传统钢腕臂结构、高速铝合金和日式钢腕臂结构,三者都是三角腕臂结构,主要差别有三点:一是平腕臂和斜腕臂连接方式不同;二是定位管形式;三是定位器形式。
本文以铝合金腕臂及定位系统为研究对象,腕臂支持装置一般采用绝缘旋转全腕臂结构形式,为水平腕臂与斜腕臂组成的平腕臂三角形结构,采用承力索座固定承力索,斜腕臂与水平腕臂间加设腕臂支撑。
就目前国内铁路接触网腕臂系统,主要的腕臂结构形式有正定位腕臂结构形式、反定位腕臂结构形式和非工作锚支定位腕臂结构形式。
接触网钢腕臂预配计算及用Visual Basic开发程序软件
接触网钢腕臂预配计算及用Visual Basic开发程序软件李东伟【摘要】常用的钢腕臂计算方法是建立数学模型,将腕臂装置分解成几个直角三角形,运用勾股定律和相似三角形定律,在直角三角形中计算出平腕臂、斜腕臂、定位管长度,以及定位环的安装位置.多数采用Excel表格进行计算,结果相对精确,但界面不直观,公式易被修改.文章推导了腕臂计算公式,运用Visual Basic编程软件,设置可视化的控件,定义多个未知变量,分双腕臂工作支和双腕臂非工作支计算两个程序模块,完成一个定型的程序界面.操作者只需输入每个模块需要的变量值,就可得到相应的结果,极大地简化了腕臂计算.【期刊名称】《高速铁路技术》【年(卷),期】2017(008)004【总页数】5页(P24-27,37)【关键词】腕臂;定位环;定位管;计算;Visual Basic软件【作者】李东伟【作者单位】中铁电气化局集团宝鸡器材有限公司, 宝鸡721013【正文语种】中文【中图分类】U225.2在接触网的安装中,道岔柱、中心柱、转换柱采用双腕臂底座,为使两支承力索能够顺利过渡,往往设计一支为抬高支。
在我国,时速200 km以下的铁路,最常见的是三角腕臂结构,目前常用的计算方法是手工计算法和Excel公式计算法,这两种计算方法前者效率低、费时费力,后者界面复杂,计算参数及公式易因误操作而发生改变。
Visual Basic6.0作为可视化编程的主流软件,用它开发腕臂预配计算软件是一种新的方法。
钢腕臂定位装置的主要组成如图1所示。
在施工方的提料工作中,作为接触网三大计算之一的腕臂计算显得十分重要。
本文提出的腕臂计算思路是先建立数学模型,将钢腕臂装置分解成几个直角三角形,应用勾股定律和相似三角形定律,在三角形中求出直角边或斜边的值。
钢腕臂装置计算前,先对其计算参数进行设定,定义如下:L1——平腕臂绝缘子单耳孔到金具远端底部的长度;L2——斜腕臂绝缘子单耳孔到金具远端底部的长度;L3——承力索座到平腕臂端头的距离;L4——套管双耳和承力索座的距离;L5——定位管安装防风拉线的预留长度;Cx——限界,B1代表上底座宽度;δ——安装后的支柱内缘相对于铅垂线的斜率;Sp——上底座偏移值国;H——结构高度;h——承力索的抬高值;h0——外轨超高;h1——上下底座的高差;h2——套管双耳的高度;h3——承力索座的高度;h4——定位管中心到接触线的高度;h5——定位环高度;DH——悬挂定位点处接触线距轨面的垂直高度;L——轨距;a1——设计拉出值;a2——设计抬高支的拉出值;m——定位点处接触线与线路中心的水平距离;c——定位点处受电弓中心与线路中心的水平距离;LP——工作支平腕臂的长度;LX——工作支斜腕臂的长度;LDWH——工作支定位环到斜腕臂单耳的安装位置距离;LDWG——工作支定位管的长度;LTP——非工作支平腕臂的长;LTX——非工作支斜腕臂的长度;LTDWH——非工作支定位环到斜腕臂单耳的安装位置距离。
电车接触网腕臂的计算
1 前 言
铁道 电气 化 ( r a i l w a y e l e t r i i f c a t i o n ) 作 为综合性 铁道工程 ,
o f c a t e n a r y i s t h e b a s i c wo r k i n g c o n t e n t o f t h e d e s i g n ,i t s c a l c e d i n t o t h e c lc a u l a t i o n o f c a n t i l e v e r
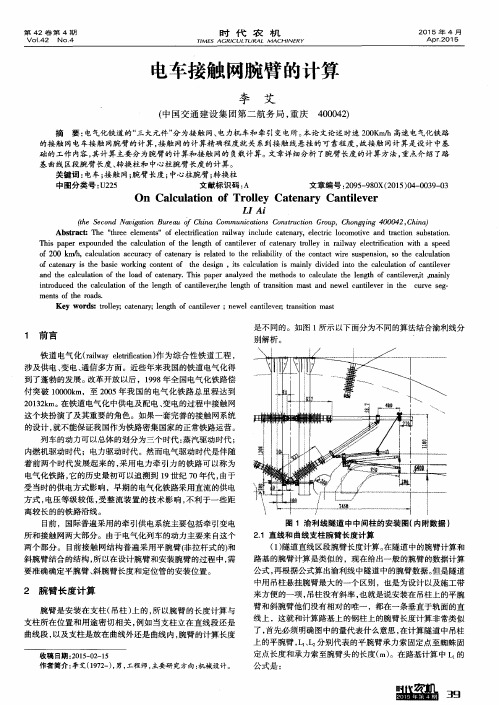
摘 要: 电气化铁道的“ 三 大元件” 分为接 触网、 电力机车和 牵引变电所。 本论文论述 时速 2 0 0 K m / h高速 电气化铁路 的接触 网电车接 触网腕臂 的计算 , 接 触网的计 算精 确程 度就关 系到接 触线悬挂的可 靠程度 , 故接 触 网计算是设计 中基 础的工作 内容 , 其计算主要分为腕臂的计算和接 触网的 负载计 算。文章详 细分析 了腕臂长度的计算方法 , 重点介绍 了路 基 曲线 区段 腕臂 长度 、 转换柱和 中心柱腕臂 长度 的计 算。 关键词 : 电车 ; 接 触网 ; 腕臂长度 ; 中心柱腕臂 ; 转换柱 中图分类号 : U 2 2 5 文献标识码 : A 文章编号 : 2 0 9 5 — 9 8 0 X( 2 0 1 5 ) 0 4 — 0 0 3 9 — 0 3
第 4 2卷 第 4期
V oI . 42 No 4
时
代
农
S i t
2015 年 4 月
A pr . 201 5
TI M E S A GRI CULTuRAL M ACH I NE RY
电车接触 网腕臂 的计算
李 艾
( 中 国交 通建 设集 团第 二航 务 局 , 重庆 4 0 0 0 4 2 )
利用“Excel”软件进行接触网腕臂预配计算
件并不能很好 的适 应各条线路不 同的安装形式 ,普遍适用
性较差 。 目前 各 大 教 材 中 的 手 工 计 算 的 公 式 仅 是 针 对 一 些 简 单 一
的 安 装 形 式 ,并 不 完 全 适 用 于 各 条 线 路 的 实 际情 况 ,计 算 精度 也 不 太 让 人满 意 。
关键词 :腕臂 ;定位管 ;定位 器;预 配 ;计算
D : 1 . 9 9 ji n1 71 5 62 11 . 0 0I 5 6 / .s.6 —6 9 . 0l .5 0 9 0 s
1 前 言 目前 电气 化 铁 路 接 触 网 施 工 中 较 为 流 行 的腕 臂 预 配 计 算 方 法 主 要 是 软 件 计 算 和 手 工 计 算 两 种 方 法 ,但 是 这 两 种 计 算 方 法 在 实 际使 用 都 存 在 相 应 的缺 陷 。
针 对 上 述 情 况 , 根据 焦 柳 铁 路 洛 张 线线 路 施 工 安 装 图 纸 及 施 工 经 验 ,我 们 编 制 了 适 用 于 本 线 路 的 计 算 公 式 ,选 择 通 用 性 及 兼 容 性 较 强 的 “ x e ”作 为 计 算 媒 介 。 由于 Ec l 此 软 件 本 身 具 有 较 强 的计 算 能 力 ,只 要 定 义 好 电 子 表 格 中 每 个 单 元 格 并 输 入 正 确 的 计 算 公 式 ,便 可 方 便 快 捷 的 计 算 出腕 臂 、 定 位 管 等 各 种 参 数 , 而 且 对 于 同一 种 安装 形 式 ,
可 以 批 量 计 算 。 无 论 是 在 何 处 , 只 要 有 一 台 安 装 有
正线定位器
2 计算过程
为 了 计 算 过 程 、查 找 错 误 、 校 验 各 参 数 的方 便 ,将 计 算
接触网单(双)腕臂长度计算
三、腕臂长度计算1-12-15 直线与曲线外侧中间柱腕臂长度计算示意图由于目前接触网结构普遍采用平腕臂结构,所以在平腕臂安装和预配过程中,需要准确确定平腕臂和斜腕臂长度,根据平腕臂长度计算,在地面预配好整体结构,对今后一次性安装成功,减少调整工作量具有重要意义。
腕臂长度计算与支柱所在位置和用途密切相关,直线和曲线计算方法不同,同样是曲线,则支柱在曲线外侧和曲线内侧时的计算方法也不同。
转换柱与中心柱的计算方法也有区别。
现就上述几种情况分别作简单介绍(仅供参考)。
(一)直线和曲线支柱腕臂长度计算图1-12-15中符号说明如下:L 1、L 2-分别表示平腕臂承力索固定点至支柱固定点长度和承力索至腕臂头长度。
(m) L 3-斜腕臂水平投影长度。
(m)L 4-非工作支承力索与工作支承力索之间的水平距离。
(m )L 平、L 斜-分别表示平腕臂底座和斜腕臂底座突出支柱部分长度。
(m)h 1-平腕臂底座与斜腕臂底座之间的垂直安装距离。
(m)h 2-斜腕臂套管双耳零件连接长度。
(m)h 3-斜腕臂垂直投影长度。
(m)h 4-支柱侧面限界测量点至平腕臂支柱固定点之间的垂直距离。
(m)H c -承力索至钢轨面的垂直高度。
(m)C x -支柱侧面限界。
(m)m c -承力索在曲线上轨平面处垂直投影与线路中心的偏移距离(a- Lh H C )。
(m) h-曲线外轨超高。
(m)1.直线区段腕臂长度计算可根据下式确定:L 1= C x +βh 4±a (m )h 3= h 1- h 2 (m )L 3= L 1 -(承力索至承力索座中心的距离)-(承力索座中心至套管双耳的距离)- βh 1 式中:a-承力索拉出值。
(m)β-支柱斜率(要考虑支柱整正后产生的斜率)。
“±”- 正定位时取“-”号,反定位时取“+”号。
平腕臂钢管长度= L 1 + L 2- L 平-L 棒 (m)斜腕臂钢管长度=2323-h L L +)(斜 -L 棒 (m)其中L 2应考虑承力索至平腕臂钢管头的距离,L 棒棒式绝缘子安装长度。
铁路电气化接触网腕臂预配计算
冯 燕 , 陈
( 1 . 郑 州铁路 职 业技 术 学院 ,郑 州
林 , 陈道 琳
4 4 1 0 0 3 )
4 5 0 0 5 2 ;2 . 武 汉铁 路 局襄 樊供 电段 ,湖北 襄 樊
x c e l 表 格进行接 触 网腕臂预 配计算 的方法 ,并给 出 [ 摘 要] 针对 电气化铁路接 触 网腕臂预 配计算 ,介绍 了一种 利用 E 了中间柱腕臂及 转换柱腕臂非 支预配 算法。利 用该 方法 ,可精 确地计算相关安装 长度 ,而无 需安装接 触 网腕
( 6 ) 可随时大范 围追溯 数据且 能对数据进 行 自由筛选
和排 序 。
( 7 ) 软件参数 自带批 注说 明,用户可 随时查看在线输 入帮助 ,使输入更加简单明了。
3 腕臂预配计算算法
在 腕臂预 配计算过 程 中,软 件严格 考虑支柱斜 率 、 扣料长度 等参数 ,准确计算 出零件 之间水平距 离和垂 直
电 工技术 I 2 0 1 3 l 1 0 期1 5 1
( 1 ) 底座偏移计算 。
P 一 1 ×a / 1 o o o P 一 2 ×a / 1 o o o
( 3 ) 斜 腕臂 棒 瓶 接 底 座 耳 孔 至 套 管 双 耳 之 间水 平 距 离 计算。
2 E x c e l 软 件 特 点
( 1 ) 采 用 了 单 一 的 且 目前 最 流行 的办 公 软 件 E x c e l
收 稿 日期 : 2 0 1 3 — 0 4 — 2 5
图1 中间柱腕臂计算模型圈
作者简介 : 冯 燕( 1 9 7 4 - ) , 硕士 , 讲 师, 研 究方向为电气工程 ; 陈林 ( 1 9 6 4 - ) , 硕士 , 讲师 , 研 究方向为电气工程。
接触网腕臂计算(非绝缘关节及单杆)
XX区间上行单腕臂
支柱型 支柱号 安装图号 号 160 180 186 198 202 208 224 230 246 252 266 268 274 290 296 312 318 332 334 340 356 362 378 384 388 396 402 408
H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78 H78
限界 倾斜值 拉出值 超高 3030 0.016 200 2750 0.023 -200 2970 0.024 -200 3000 0.02 -200 3180 -0.005 200 3200 0.031 200 3200 0.039 200 3300 0.005 200 2970 0.015 200 3090 0.035 -200 0 0 0 0 0 0 0 50 0 0 0 0 0 30 0 0 0 0 0 0 0 -60 -100 -100 -60 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
200 -200 -200 -200 200 200 200 -56 200 -200 -200 200 300 147 300 -300 -300 300 -200 -200 200 107 311 311 107 -200
H78
限界 倾斜值 拉出值 超高 3080 0.023 200 0
定位 器型 号
定位 器坡 度
支柱埋 深
m
杆内缘 距承力 索座的 距离X1
上底 座位 置
下底 座位 置