第三章模糊控制题
科技大学模糊控制第三章

3.2 模糊逻辑推理
我们逐渐接近了可以用计算过程进行这样类似思维的 模糊推理了。 要计算 B A R A A B 用到了 A B (蕴含运算)
A B A B 1 A 有不同的含义:扎德定义 玛达尼定义 A B A B
关系:元素(同一集合或不同集合)或集合间的联系。
关系可用“ R ”来表示,“ R ”可以是:大于、小于、 在前、在后、包含、相似等。 若 x1 与 x2 间有关系 R ,记为: x1 R x2 。 反之,记为 x1 R x2。 来仔细分析一下各种“关系”,看看还可以得到 什么结果。
北京科技大学自动化
但这种模糊推理方法是否与人通过思维活动 得到的结果一致或相近呢?
北京科技大学自动化
3.2 模糊逻辑推理
例:
设在论域T(温度)={0,20,40,60,80,100}和P(压力)= {1,2,3, 4,5,6,7} 上定义模糊子集的隶属函数:
0 0.1 0.3 0.6 0.85 1 0 20 40 60 80 100 0 0.1 0.3 0.5 0.7 0.85 1 B(压力大) 1 2 3 4 5 6 7 A(温度高)
北京科技大学自动化
3.2 模糊逻辑推理
例:友好是一种对称关系(知识、大前提) 小张和小李友好 (事实、小前提) 小李和小张友好 (结论)
“友好”是一个模糊概念,但事实中的“友好”和知识 中的“友好”完全相同 确定性推理。
例:大前提/知识: 健康则长寿 小前提/事实: 王先生很健康
(有模糊词) (不严格相同,有 程度上的差别)
此处,A 和 B 分别为相应论域(可以是 X 和 Y )上的 模糊集合。 且: R ( x, y) min[A ( x), B ( y)]
第三章模糊控制题
第2章 模糊控制13.1 模糊控制的基本思想研究和考虑人的控制行为特点,对于无法构造数学模型的对象让计算机模拟人的思维方式,进行控制决策。
将人的控制行为,总结成一系列条件语句,运用微机的程序来实现这些控制规则。
在描述控制规则的条件语句中的一些词,如“较大”、“稍小”、“偏高”等都具有一定的模糊性,因此用模糊集合来描述这些模糊条件语句,即组成了所谓的模糊控制器。
3.2 模糊集合的定义模糊集合的定义:给定论域U ,U 到[0,1]闭区间的任一映射A μ]1,0[:→U μA都确定U 的一个模糊集合A , A μ称为模糊集合且的隶属函数。
)(x μA 的取值范围为闭区间[0,1],)(x μA 接近1,表示x 属于A 的程度高;)(x μA 接近0,表示x 属于A 的程度低。
3.3 常用的3种模糊集合的表示方法, (1)Zadeh 表示法用论域中的元素x i 与其隶属度)(i A x μ按下式表示A ,则在Zadeh 表示法中,隶属度为零的项可不写入。
(2)序偶表示法用论域中的元素x i 与其隶属度)(i A x μ的构成序偶来表示且,则在序偶表示法中,隶属度为零的项可省略。
(3)向量表示法用论域中元素x i 的隶属度)(i A x μ构成向量来表示,则在向量表示法中,隶属度为零的项不能省略。
3.4凸模糊集的定义若A 是以实数R 为论域的模糊集合,其隶属函数为)(x μA ,如果对任意实数b x a <<,都有则称A 为凸模糊集。
凸模糊集实质上就是其隶属函数具有单峰值特性。
第2章 模糊控制23.5 常见的4种隶属函数 (1)正态型正态型是最主要也是最常见的一种分布,表示为其分布曲线如图2-4所示。
图2-4 正态型分布曲线(2)三角型1(),1()(),0,x a a x b b a x x c b x cb c μ⎧-≤<⎪-⎪⎪=-≤≤⎨-⎪⎪⎪⎩其它(3) 降半梯形1(),0,x a b x x a x bb a b xμ≤⎧⎪-⎪=<≤⎨-⎪<⎪⎩,(4)升半梯形第2章 模糊控制3(),1,x a x a x a x bb a b xμ≤≤⎧⎪-⎪=<<⎨-⎪≤⎪⎩0,03.6 己知两个模糊向量分别如下所示,试求它们的笛卡儿乘积x =[0.9 0.5 0.2],y=[0.2 0.3 0.6 1]解:由定义,有x y T x y ⨯@o =⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦0.90.50.2ο[]0.2 0.3 0.6 1.0= ∧∧∧∧⎡⎤⎢⎥∧∧∧∧⎢⎥⎢⎥∧∧∧∧⎣⎦0.90.2 0.90.3 0.90.6 0.9 1.00.50.2 0.50.3 0.50.6 0.5 1.0 0.20.2 0.20.3 0.20.6 0.2 1.0 = ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦0.2 0.3 0.6 0.90.2 0.3 0.5 0.5 0.2 0.2 0.2 0.2 3.7 模糊向量的内积与外积设有1×n 维模糊向量x 和1×n 维模糊向量y ,则定义为模糊向量x 和y 的内积。
第三章(2) 模糊控制系统的设计

假设中等小费是15%,高是25%,小费低是5%。 小费函数大致形状如下。明显地,曲线形状受 当地传统、文化喜好影响,但三条规则通用。
0.25
0.15
0.05
服务差或食品差 服务好或食品好
3.3 模糊控制器的设计举例 31
μ μ A(e) μ B(e)
0
e
3.2模糊控制系统的设计 12
二、模糊控制器的设计原则 b). α 较小,控制灵敏度高; α 较大,鲁棒性好; 一般取α = 0.5。
μ μ A(e) μ B(e) μ μ A(e) μ B(e)
0
e
0
e
3.2模糊控制系统的设计
13
二、模糊控制器的设计原则 3、设计规则库 规则数: N=nout*(nin(nlevel-1)+1)。 4、设计模糊推理 可由软、硬件实现。
20
3.3 模糊控制器的设计举例
3.3 模糊控制器的设计举例 4、模糊控制规则的确定 为使系统输出的动态特性最佳,根据操作经验而 总结的一条条模糊条件语句。
3
4 5 2 1
Td
0
t
3.3 模糊控制器的设计举例
21
3.3 模糊控制器的设计举例 (1)误差e = T – Td 为负大时,全功率加热。
5、精确化方法 一定要选取有代表性的值。
3.2模糊控制系统的设计
14
3.3 模糊控制器的设计举例 以加热炉温度控制系统为例: 由于模糊关系矩阵是一个高阶矩阵,多次合成计 算使输出使系统实时性变差,在实际应用中通 常采用查表法。
DE
Td
_
e
Δ
KΔe Ke E
模糊 控制表
U
Ku
u
被控对象
模糊控制3
二输入玛达尼推理方法过程
• 这种推理方法有一个缺点,那就是其推论 结果经常不够平滑
• 不用推理前件的隶属度为基准去切割推理 后件的隶属函数,而是用该隶属度去乘后 件的隶属函数 • 这样得到的推理结论就不呈平台梯形,而 是原隶属函数的等底缩小。这种推理的结 果经过各个规则“并”运算后,总推理结 果的平滑性得到改善
x x
多输入玛达尼推理削顶法的几何意义是:分别 求出A 对A,B 对B的隶属函数度a A,a B,并且
' '
取这两个之中最小的一个值为基准去切割B的 隶属函数,便得到结论C
'
例题 有下列模糊集: A 1 0 .4 0 x1 x 2 x 3
'
B
0 .1 0 .6 1 y1 y 2 y 3
a B ( y)
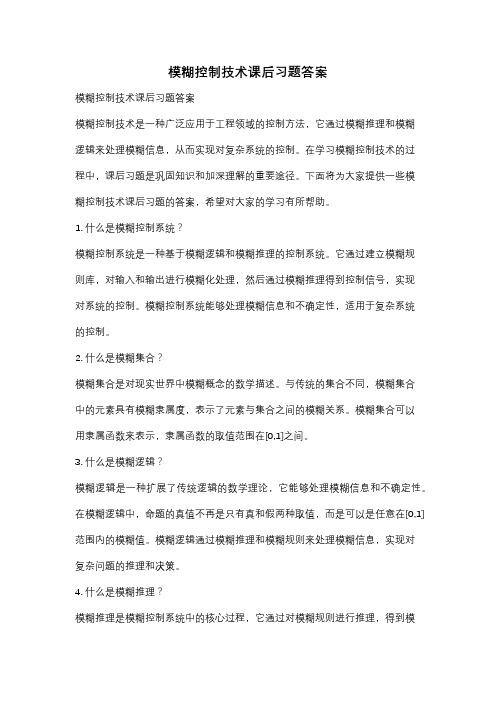
sup表示对后面算式结果当x在X中变化时,取其上确界 当X为有限论域时,sup就是取大运算。 a H(A ' A )
根据玛达尼方法,结论B'可以用此适配度a与模糊 集合B进行模糊与,即取小运算,在图形上就是用 a作基准去切割,便可得到推论的结果。玛达尼推 理方法经常又称为削顶法
对整个规则,前件的确信度小于等于单独项的确信度
确定激活哪些规则
• 确定激活哪些规则称为匹配,如果规则前 件的确信度>0,则该条规则就被激活,推 理机就是要找出与当前输入量有关的规则 并激活
de( t ) 若当前输入e( t ) 0, 且 0.294 dt 确定哪些规则被激活
• 这就意味着,含有下列前件项的规则将被 激活: • “偏差为ZO” “偏差变化为ZO” • “偏差变化为PS” • 下述两条规则被激活: • (1)如果偏差为ZO,并且偏差变化为ZO, 那么力为ZO;(规则确信度为0.25) • (2)如果偏差为ZO,并且偏差变化为PS, • 那么力为ZS;(规则确信度为0.5)
神经网络与模糊控制考试题及答案

一、填空题1、模糊控制器由模糊化接口、解模糊接口、知识库和模糊推理机组成2、一个单神经元的输入是 1.0 ,其权值是 1.5,阀值是-2,则其激活函数的净输入是-0.5 ,当激活函数是阶跃函数,则神经元的输出是 13、神经网络的学习方式有导师监督学习、无导师监督学习和灌输式学习4、清晰化化的方法有三种:平均最大隶属度法、最大隶属度取最小/最大值法和中位数法,加权平均法5、模糊控制规则的建立有多种方法,是:基于专家经验和控制知识、基于操作人员的实际控制过程和基于过程的模糊模型,基于学习6、神经网络控制的结构归结为神经网络监督控制、神经网络直接逆动态控制、神网自适应控制、神网自适应评判控制、神网内模控制、神网预测控制六类7.傅京逊首次提出智能控制的概念,并归纳出的3种类型智能控制系统是、和。
7、人作为控制器的控制系统、人机结合作为控制器的控制系统、无人参与的自主控制系统8、智能控制主要解决传统控制难以解决的复杂系统的控制问题,其研究的对象具备的3个特点为、和。
8、不确定性、高度的非线性、复杂的任务要求9.智能控制系统的主要类型有、、、、和。
9、分级递阶控制系统,专家控制系统,神经控制系统,模糊控制系统,学习控制系统,集成或者(复合)混合控制系统10.智能控制的不确定性的模型包括两类:(1) ;(2) 。
10、(1)模型未知或知之甚少;(2)模型的结构和参数可能在很大范围内变化。
11.控制论的三要素是:信息、反馈和控制。
12.建立一个实用的专家系统的步骤包括三个方面的设计,它们分别是、和。
知识库的设计推理机的设计人机接口的设计13.专家系统的核心组成部分为和。
知识库、推理机14.专家系统中的知识库包括了3类知识,它们分别为、、和。
判断性规则控制性规则数据15.专家系统的推理机可采用的3种推理方式为 推理、 和 推理。
15、正向推理、反向推理和双向推理16.根据专家控制器在控制系统中的功能,其可分为 和 。
模糊控制技术课后习题答案
模糊控制技术课后习题答案模糊控制技术课后习题答案模糊控制技术是一种广泛应用于工程领域的控制方法,它通过模糊推理和模糊逻辑来处理模糊信息,从而实现对复杂系统的控制。
在学习模糊控制技术的过程中,课后习题是巩固知识和加深理解的重要途径。
下面将为大家提供一些模糊控制技术课后习题的答案,希望对大家的学习有所帮助。
1. 什么是模糊控制系统?模糊控制系统是一种基于模糊逻辑和模糊推理的控制系统。
它通过建立模糊规则库,对输入和输出进行模糊化处理,然后通过模糊推理得到控制信号,实现对系统的控制。
模糊控制系统能够处理模糊信息和不确定性,适用于复杂系统的控制。
2. 什么是模糊集合?模糊集合是对现实世界中模糊概念的数学描述。
与传统的集合不同,模糊集合中的元素具有模糊隶属度,表示了元素与集合之间的模糊关系。
模糊集合可以用隶属函数来表示,隶属函数的取值范围在[0,1]之间。
3. 什么是模糊逻辑?模糊逻辑是一种扩展了传统逻辑的数学理论,它能够处理模糊信息和不确定性。
在模糊逻辑中,命题的真值不再是只有真和假两种取值,而是可以是任意在[0,1]范围内的模糊值。
模糊逻辑通过模糊推理和模糊规则来处理模糊信息,实现对复杂问题的推理和决策。
4. 什么是模糊推理?模糊推理是模糊控制系统中的核心过程,它通过对模糊规则进行推理,得到模糊输出。
模糊推理的基本思想是将输入与模糊规则库中的规则进行匹配,然后根据匹配程度和规则的权重计算出输出的模糊值。
常用的模糊推理方法有模糊关联和模糊推理机。
5. 什么是模糊控制器?模糊控制器是模糊控制系统中的关键组成部分,它通过模糊推理和模糊规则来生成控制信号,实现对系统的控制。
模糊控制器的输入是模糊化后的系统状态,输出是经过去模糊化处理的控制信号。
常见的模糊控制器有模糊PID控制器和模糊神经网络控制器。
通过以上几个问题的回答,我们对模糊控制技术有了初步的了解。
模糊控制技术作为一种处理模糊信息和不确定性的控制方法,在工程领域有着广泛的应用。
第三章答案
3)求关系矩阵R
4)由A’,B’,求出D’
5)仿照2),将D’化为列矢量DT’
6)最后求出模糊推理输出
即
不做
2-1设语言变量速度V、误差W、控制电压U的论域分别为【0,200】、【-30,30】、【0,10】。假设各语言变量的离散论域是由相应连续论域十等分后构成。要求根据常规经验法确定在连续域、离散域下速度大、误差为零、控制电压较大这三个语言值的隶属度函数。
把例题方程分解为
2)按照书上公式(2-63)
把例题方程分解为
3)由 解得到
因此根据
得到
其中x2表示0.2到1范围内。
4)由 解得到
式中,[r]表示等式方程的解;(r)表示不等式方程的解
因此根据
得到
因此,此模糊方程的部分解分别为
所以
(2)求 的解
1)、按照书上公式(2-62)
把例题方程分解为
2)按照书上公式(2-63)
上确界(Sup)算子
(1)
(2)
2-5(仿例题2-12)考虑如下逻辑条件语句
如果转角误差远远大于15。 那么 快速减少方向角 其隶属度函数定义为
问:当A’=转角误差大约在20。时方向角应该怎样变化?
设 。(用玛达尼推理法计算)
解
用玛达尼推理法计算
且
由
2-7求解模糊关系方程
的解
解:
(1)、求 的解
1)、按照书上公式(2-62)
第二章模糊控制的理论基础(学时8)
模糊控制的理论基础
重点:模糊集数学理论
1、与模糊控制有关的模糊集理论
2、隶属度函数
3、模糊语言变量
4、模糊逻辑推理
2-1、2-6不做,2-2
第三章模糊控制
▪ 规则库的基本要求
• 规则数量合理
控制规则的增加可以增加控制的精度,但是会影响系统的实时 性;控制规则数量的减少会提高系统的运行速度,但是控制的 精度又会下降。所以,需要在控制精度和实时性之间进行权衡
• 规则要具有一致性
控制规则的目标准则要相同。不同的规则之间不能出现相矛盾 的控制结果。如果各规则的控制目标不同,会引起系统的混乱。
Kec选的较大时,系统的超调变小,系统的响应速度变慢。
Ku选的过小时,系统动态响应过程变长,选择过大会导致系 统振荡。 Ku影响着控制器的输出,能过调整Ku可以改变被控 对象输入的大小。
14
3.1 模糊控制的工作原理
❖ 对输入量进行模糊化处理,包括确定语言变量和 隶属函数
▪ 确定语言变量的语言值 通常在语言变量的论域上,将其划分为有限的几档。
11
3.1 模糊控制的工作原理
❖ 输入量和输出量论域的设计
如何实现实际的连续域到有限整数离散域的转换?
通过引入量化因子ke、kec和比例因子ku来实现
期望值
+ - y
e
E
ke
d/dt
ec
kec
EC
模糊 U 控制器
u
ku
实际中误差的连续取值范围是e=[eL,eH],则:
ke
2m eH eL
12
3.1 模糊控制的工作原理
E* ke(e*eH2 eL)
E*C k ec(e*ceH c2 eL c)
18
3.1 模糊控制的工作原理
❖ 模糊化过程小结
第二步 将模糊控制器的精确输入E*和EC*转化为模糊输入A*和B*。
将E*和EC*所对应的隶属度最大的模糊值当作当前模糊控制器 的模糊输入量A*和B*。
模糊控制第三章解析答案课堂
? 模糊集合一般由论域和隶属函数构成。因此, 模糊化的实质就是求取相应概念对应数值域 的模糊集合隶属函数。
? 为了便于工程实现,通常把输入变量范围人 为地定义成离散的若干级,所定义级数的多 少取决于所需输入量的分辨率。定义输入量 的隶属函数可选用吊钟型、梯形和三角形。
? 理论上吊钟型最为理想,但计算复杂。实践 证明:用三角形和梯形函数其性能并没有十 分明显的差别。
36
? 用于描述人们控制经验的基本语句结构有 三种形式,它们分别反映了三种基本的推 理。这三种基本结构和形式如下:
? 这种推理是一种最简单的蕴涵关系,在语
言表达时表示为“如果 A,那么B ”,即
有:if A then B
~
~
37
② ( A? B) ? ( AC ? C)结构
~
~
~
~
? 这种推理较之前一种复杂,这种蕴涵关系在 用语言表达时叙述为“如果 A,那么B;否则 C ”,即有:
38
? 这种推理的前件有两个,这种蕴涵关系在 用语言表述时为“如果 A而且 B那么C ”, 即有:
? 模糊控制规则应具备如下特性: 1. 完备性 ? 通过设计经验和工程知识,使模糊控制规
则具有完备性。所谓完备性,是指对于任 意给定的输入,均有相应的控制作用。要
39
求控制规则的完备性是保证系统能被控制的 必要条件之一。 2. 一致性 ? 控制规则的一致性是指控制规则中不存在 相互矛盾的规则。如果两条规则的条件部 分相同,但结论部分相差很大,则称两条 规则相互矛盾。 3. 交互作用性 ? 如果控制器的输出值总由数条控制规则来 决定,说明控制规则之间是相互联系、相
方法,其基本思想是:首先定义一基础概念 (Genic concept)及其相应的隶属函数, 然后通过语义算子的作用,产生具有相关语 义的新概念及其隶属函数。 ? 常用的语义算子主要有:
模糊控制综合练习参考
模糊控制综合练习参考资料实验一模糊工具箱的使用一、实验目的1、掌握Matlab模糊工具箱的应用。
2、掌握模糊集合的基本运算。
3、能够使用Simulink工具箱设计模糊控制系统。
二、实验设备1、PC机2、Matlab软件三、实验内容第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy 回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型)将Number of MFs 设置为2,点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type中选择形状,在Params中键入范围,然后回车如下图:本例中:In_x,In_y隶属度函数相同,如下Out_x,Out_y隶属度函数相同,如下:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 模糊控制13.1 模糊控制的基本思想研究和考虑人的控制行为特点,对于无法构造数学模型的对象让计算机模拟人的思维方式,进行控制决策。
将人的控制行为,总结成一系列条件语句,运用微机的程序来实现这些控制规则。
在描述控制规则的条件语句中的一些词,如“较大”、“稍小”、“偏高”等都具有一定的模糊性,因此用模糊集合来描述这些模糊条件语句,即组成了所谓的模糊控制器。
3.2 模糊集合的定义模糊集合的定义:给定论域U ,U 到[0,1]闭区间的任一映射A μ]1,0[:→U μA都确定U 的一个模糊集合A , A μ称为模糊集合且的隶属函数。
)(x μA 的取值范围为闭区间[0,1],)(x μA 接近1,表示x 属于A 的程度高;)(x μA 接近0,表示x 属于A 的程度低。
3.3 常用的3种模糊集合的表示方法, (1)Zadeh 表示法用论域中的元素x i 与其隶属度)(i A x μ按下式表示A ,则在Zadeh 表示法中,隶属度为零的项可不写入。
(2)序偶表示法用论域中的元素x i 与其隶属度)(i A x μ的构成序偶来表示且,则在序偶表示法中,隶属度为零的项可省略。
(3)向量表示法用论域中元素x i 的隶属度)(i A x μ构成向量来表示,则在向量表示法中,隶属度为零的项不能省略。
3.4凸模糊集的定义若A 是以实数R 为论域的模糊集合,其隶属函数为)(x μA ,如果对任意实数b x a <<,都有则称A 为凸模糊集。
凸模糊集实质上就是其隶属函数具有单峰值特性。
第2章 模糊控制23.5 常见的4种隶属函数 (1)正态型正态型是最主要也是最常见的一种分布,表示为其分布曲线如图2-4所示。
图2-4 正态型分布曲线(2)三角型1(),1()(),0,x a a x b b a x x c b x cb c μ⎧-≤<⎪-⎪⎪=-≤≤⎨-⎪⎪⎪⎩其它(3) 降半梯形1(),0,x a b x x a x bb a b xμ≤⎧⎪-⎪=<≤⎨-⎪<⎪⎩,(4)升半梯形第2章 模糊控制3(),1,x a x a x a x bb a b xμ≤≤⎧⎪-⎪=<<⎨-⎪≤⎪⎩0,03.6 己知两个模糊向量分别如下所示,试求它们的笛卡儿乘积x =[0.9 0.5 0.2],y=[0.2 0.3 0.6 1]解:由定义,有x y T x y ⨯@o =⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦0.90.50.2ο[]0.2 0.3 0.6 1.0= ∧∧∧∧⎡⎤⎢⎥∧∧∧∧⎢⎥⎢⎥∧∧∧∧⎣⎦0.90.2 0.90.3 0.90.6 0.9 1.00.50.2 0.50.3 0.50.6 0.5 1.0 0.20.2 0.20.3 0.20.6 0.2 1.0 = ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦0.2 0.3 0.6 0.90.2 0.3 0.5 0.5 0.2 0.2 0.2 0.2 3.7 模糊向量的内积与外积设有1×n 维模糊向量x 和1×n 维模糊向量y ,则定义为模糊向量x 和y 的内积。
与内积的对偶运算称为外积。
第2章模糊控制43.7 模糊逻辑推理1.简单模糊条件语句对于上面介绍的广义肯定式推理,结论B '是根据模糊集合A '和模糊蕴含关系A →B 的合成推出来的,因此可得如下的模糊推理关系R A B A A B οο'=→'=')(式中,R 为模糊蕴含关系,“ο”是合成运算符。
它们可采用以上所列举的任何一种运算方法。
例2-7若人工调节炉温,有如下的经验规则:“如果炉温低,则应施加高电压”,当炉温为“非常低”时,应施加怎样的电压。
解:设x 和y 分别表示模糊语言变量“炉温”和“电压”,并设x 和y 的论域为X =Y={1,2,3,4,5}A 表示炉温低的模糊集合B 表示高电压的模糊集合从而模糊规则可表述为:“如果x 是A ,则y 是B ”。
设A '为非常A ,则上述问题变为 “如果x 是A ',则B '应是什么”。
为了便于计算,将模糊集合A 和B 与成向量形式A =[1 0.8 0.6 0.4 0.2],B =[0.2 0.4 0.6 0.8 1]由于该例中x 和y 的论域均是离散的,因而模糊蕴含关系Kc 可用如下模糊矩阵来表示当A ' =“炉温非常低”= A 2 = [1 0.64 0.36 0.16 0.04]时第2章 模糊控制5其中B '中的每项元素是根据模糊关系矩阵的合成规则求出的,如第1行第1列的元素为这时,推论结果B '仍为“高电压”。
2.多重模糊条件语句1)使用“and ”连接的模糊条件语句 在模糊逻辑控制中,常常使用如下的 广义肯定式推理结构模糊推理关系R A B A A B οο'=→'=')(与前面不同的是,这里的模糊条件的输入和前提部分是将模糊命题用“and ”连接起来 的。
一般情况下可以有多个“and ”将多个模糊命题连接在一起。
模糊前提“x 是A ,则y 是B ”可以看成是直积空间X ×Y上的模糊集合.并记为A ×B ,其隶属函数为或者时的模糊蕴含关系可记为A ×B →C ,其具体运算方法一般采用以下关系结论z 是C ',可根据如下的模糊推理关系得到式中, R 为模糊蕴含关系;“ο”是合成运算符。
它们可采用以上列举的任何一种运算方法。
2)使用“also ”连接的模糊条件语句在模糊逻辑控制中,也常常给出如下一系列的模糊控制规则这些规则之间无先后次序之分。
连接这些子规则的连接词用“also ”表示。
这就要求对于“also ”的运算具有能够任意交换和任意结合的性质。
而求并和求交运算均能满足这样的要求。
根据Mizumoto 的研究结果,当模糊蕴含运算采用R c 或R p ,“also ”采用求并运算时,可得最好的控制结果。
假设第i 条规则“如果x 是A i and y 是B i ,则z 是C i ”的模糊蕴含关系R i 定义为第2章 模糊控制6R i =(A i andB i )→C i 其中“A i and B i ”是定义在X ×Y 上的模糊集合A i ×B i ,R i =( A i and B i )→C i 是定义在X ×Y ×Z 上的模糊蕴含关系。
则所有n 条模糊控制规则的总模糊蕴含关系为(取连接词“also ”为求并运算)i ni R R Y 1==输出模糊量z (用模糊集合C '表示)为R BA C ο)('⨯'='此处,)()(),()(y μx μy x μB A B A '''⨯'∧= 或 )()(),()(y μx μy x μB A B A '''⨯'= 3.模糊推理的性质 1)性质1若合成运算“ο”采用最大—最小法或最大—积法,连接词“also ”采用求并法.则“ο”和“also ”的运算次序可以交换,即2)性质2若模糊蕴含关系采用R c 和R p 时,则有例2-8 己知一个双输入单输出的模糊系统,其输入量为x 和y ,输出量为z ,其输入/输出关系可用如下两条模糊规则描述:R 1:如果x 是A 1 and y 是B 1,则z 是C 1 R 2:如果x 是A 2 and y 是B 2,则z 是C 2现已知输入为x 是A 'and y 是B ',试求输出量z 。
这里x 、y 、z 均为模糊语言变量。
解:由于这里所有模糊集合的元素均为离散量,因此模糊集合可用模糊向量来描述,模糊关系可用模糊关系矩阵来描述。
(1)求每条规则的模糊组合关系R i =(A i and B i )→C i (i =1,2)若此处A i and B i 采用求交运算,蕴含关系采用最小运算R c ,则第2章 模糊控制7为便于下面进一步的计算,可将A 1×B 2的模糊关系矩阵表示成如下的向量同理可得2)求总的模糊蕴含关系R3)计算输入量的模糊集合(4)计算输出量的模糊集合第2章 模糊控制8最后求得输出量z 的模糊集合为2.3.1 模糊控制系统的组成模糊控制系统由模糊控制器和控制对象组成,如图2-9所示。
图2-9 模糊控制系统的组成2.3.2 模糊控制器的基本结构模糊控制器的基本结构,如图2-9虚线框中所示。
它主要包括以下四个部分。
1.模糊化(fuzzyfication )模糊化的作用是将输入的精确量转换成模糊化量。
其输入量包括外界的参考输入、系统的输出或状态等。
模糊化的具体过程如下;(1)首先对这些输入量进行处理,以变成模糊控制器要求的输入量。
例如,常见的情况是计算e=r -y 和dt de e =&(式中,r 表示参考输入;y 表示系统输出;e 表示误差)。
有时为了减小噪声的影响,常常对e &进行滤波后再使用,如可取[1)]es Ts e =+&; (2)将上述已经处理过的输入量进行尺度变换,使其变换到各自的论域范围;(3)将已经变换到论域范围的输入量进行模糊处理,使原先精确的输入量变成模糊量,并用相应的模糊集合来表示。
2.知识库(knownledge base )知识库中包含了具体应用领域中的知识和要求的控制目标制规则库两部分组成。
它通常由数据库和模糊控制规则库两部分组成。
(1)数据库主要包括各语言变量的隶属函数,尺度变换因子及模糊空间的分级数等。
第2章 模糊控制9(2)规则库包括了用模糊语言变量表示的一系列控制规则。
它们反映了控制专家的经验和知识。
3.模糊推理(fuzzy reasoning) 模糊推理是模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力程是基于模糊逻辑中的蕴含关系及推理规则来进行的。
4.清晰化(defuzzyfication)清晰化的作用是将模糊推理得到的控制量(模糊量)变换为实际用于控制的清晰量。
它包含以下两部分内容:(1)将模糊的控制量经清晰化变换,变成表示在论域范围的清晰量; (2)将表示在论域范围的清晰量经尺度变换变成实际的控制量。
2.3.3 模糊控制的基本原理1.一步模糊控制算法模糊控制的基本原理可由图2-10表示,首先把误差信号E 的精确量进行模糊量化变成模糊量,误差E 的模糊量可用相应的模糊语言表示,得到误差E 的模糊语言集合的一个子集~e (~e实际上是一个模糊向量)。
再由~e 和模糊控制规则~R (模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量~u 为(2—3—1)式中,~u 为一个模糊量。
图2-10 模糊控制原理框图为了对被控对象施加精确的控制,还需要将模糊量~u 转换为精确量,即非模糊化处理(亦称清晰化)。