牛顿迭代法求解非线性方程组的代码
二维牛顿迭代法python代码实现

二维牛顿迭代法python代码实现牛顿迭代法是一种求解方程根的数值方法,通过迭代的方式逐步逼近方程的根。
下面是一个简单的二维牛顿迭代法的Python代码实现:```pythonimport numpy as npfrom numpy.linalg import invdef f(x):#定义方程组#在这里,假设我们要求解的方程组为x^2+y^2-4=0和x*y-1=0return np.array([x[0]2+x[1]2-4,x[0]*x[1]-1])def jacobian_matrix(x):#定义雅可比矩阵#雅可比矩阵是方程组的偏导数组成的矩阵return np.array([[2*x[0],2*x[1]],[x[1],x[0]]])def newton_iteration(x0,tolerance=1e-5,max_iterations=100):x=x0for i in range(max_iterations):#计算方程组的函数值和雅可比矩阵fx=f(x)jacobian=jacobian_matrix(x)#判断是否达到精度要求if np.max(np.abs(fx))<tolerance:print(f"达到精度要求,迭代次数:{i+1}")return x#使用牛顿迭代公式进行迭代delta_x=np.dot(inv(jacobian),-fx)x=x+delta_xprint(f"达到最大迭代次数,迭代次数:{max_iterations}")return x#初始猜测值initial_guess=np.array([1.0,1.0])#调用牛顿迭代函数result=newton_iteration(initial_guess)print("方程组的根为:",result)```这段代码演示了如何使用牛顿迭代法求解一个简单的二维方程组。
matlab实现牛顿迭代法求解非线性方程组
matlab 实现牛顿迭代法求解非线性方程组已知非线性方程组以下3*x1-cos(x2*x3)-1/2=0x1^2-81*(x2+^2+sin(x3)+=0exp(-x1*x2)+20*x3+(10*pi-3)/3=0求解要求精度达到————————————————————————————————第一成立函数fun储藏方程组编程以下将保留到工作路径中:function f=fun(x);%定义非线性方程组以下%变量 x1 x2 x3%函数 f1 f2 f3syms x1 x2 x3f1=3*x1-cos(x2*x3)-1/2;f2=x1^2-81*(x2+^2+sin(x3)+;f3=exp(-x1*x2)+20*x3+(10*pi-3)/3;f=[f1f2 f3]; ————————————————————————————————成立函数dfun用来求方程组的雅克比矩阵将保留到工作路径中:function df=dfun(x);%用来求解方程组的雅克比矩阵储藏在dfun 中f=fun(x);df=[diff(f,'x1');diff(f,'x2');diff(f,'x3')];df=conj(df'); ————————————————————————————————编程牛顿法求解非线性方程组将保留到工作路径中:function x=newton(x0,eps,N);con=0;%此中 x0 为迭代初值 eps 为精度要求 N 为最大迭代步数con 用来记录结果能否收敛for i=1:N;f=subs(fun(x0),{'x1' 'x2' 'x3'},{x0(1) x0(2) x0(3)});df=subs(dfun(x0),{'x1' 'x2' 'x3'},{x0(1) x0(2) x0(3)});x=x0-f/df;for j=1: length(x0);il(i,j)=x(j);endif norm(x-x0)<epscon=1;break;endx0=x;end%以下是将迭代过程写入txt 文档文件名为fid=fopen('','w');fprintf(fid,'iteration');for j=1:length(x0)fprintf(fid,'x%d',j);endfor j=1:ifprintf(fid,'\n%6d',j);for k=1:length(x0)fprintf(fid,'%',il(j,k));endendif con==1fprintf(fid,'\n计算结果收敛!');endif con==0fprintf(fid,'\n迭代步数过多可能不收敛!');endfclose(fid);————————————————————————————————运转程序在matlab 中输入以下内容newton([],,20) ————————————————————————————————输出结果——————————————————————————————————————————在 iteration 中查察迭代过程iteration x1 x2 x3.mulStablePoint 用不动点迭代法求非线性方程组的一个根function[r,n]=mulStablePoint(F,x0,eps)%非线性方程组: f%初始解: a%解的精度: eps%求得的一组解:r%迭代步数: nif nargin==2eps=;endx0 = transpose(x0);n=1;tol=1;while tol>epsr= subs(F,findsym(F),x0);%迭代公式tol=norm(r-x0);%注意矩阵的偏差求法,norm 为矩阵的欧几里德范数n=n+1;x0=r;if(n>100000)%迭代步数控制disp('迭代步数太多,可能不收敛!');return;endendx0=[0 0 0];[r,n,data]=budong(x0);disp(' 不动点计算结果为')x1=[1 1 1];x2=[2 2 2];[x,n,data]=new_ton(x0);disp( ’初始值为0,牛顿法计算结果为:’)[x,n,data]=new_ton(x1);disp(' 初始值为1,牛顿法计算结果为:')[x,n,data]=new_ton(x2);disp ('初始值为2,牛顿法计算结果为:')function[r,n,data]=budong(x0, tol)if nargin=-1tol=1e-3:endx1=budong fun(x0);n=1;while(norm(x1-x0))tol)&(n500)x0=x1;x1=budong_fun(x0);n=n+1:data(:,n)=x1;endr=x1 :function [x,n,data]=new_ton(x0, tol)if nargin=-1tol=1e-8;endx1=x0-budong_fun(x0)/df1(x0);n=1;while (norm(x1-x0))tol)x0=x1;x1=x0-budong_fun(x0)/df1(x0);n=n+1;data(:,n)=x1;endx=x1;function f=budong_fun(x)f(1)=3* x(1)-cos(x(2)*x(3))-1/2;f(2)=x(1)^2-81*(x(2)+^2+sin(x(3))+;f(3)=exp(-x(1)*x(2))+20* x(3)+10* pi/3-1; f=[f(1)*f(2)*f(3)];function f=df1(x)f=[3sin(x(2)*x(3))*x(3) sin(x(2)*x(3))*x(2)2* x(1)-162*(x(2)+cos(x(3))exp(-x(1)*x(2))*(-x(2))exp(-x(1)*x(2))*(-x(1))20]; 结果:不动点计算结果为r=+012*NaN-Inf初始值为0,牛顿法计算结果为:x=初始值为1,牛顿法计算结果为:x=初始值为2,牛顿法计算结果为:x=。
C++二元非线性方程组
二元非线性方程牛顿迭代法C++代码。
小弟需要解一个二元非线性方程组,虽然说matlab的解法是一两个代码的事,但是我的情况是需要在C++ 里面实现。
由于自己不熟悉C++代码和牛顿迭代法的解法,小弟最近在网上找了一些资料。
发现很多有问题的例子,纯粹是在误导别人,浪费别人的时间。
于是小弟自己在看了解法(牛顿迭代法)的基础上,自己通过C++ 语言实现了一些简单方程组的解法,分享给给大家。
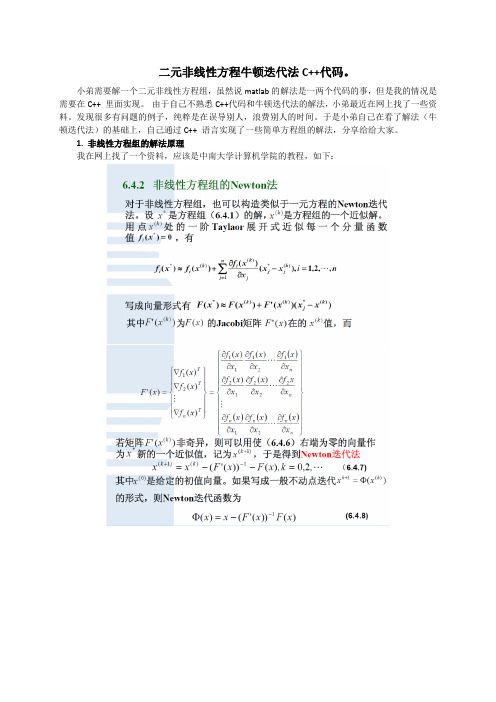
1. 非线性方程组的解法原理我在网上找了一个资料,应该是中南大学计算机学院的教程,如下:注意,他这里的例子第二个方程应该是,x1*x2*x2+x1-10*x2+8经过观察,我发现其实对于2元方程来说:f(x1,x2)和g(x1,x2)。
牛顿迭代法里面的迭代量(Δx 1 和Δx 2) 可以如下表示。
(我看到网上很多例子用矩阵来表示,我表示看不太懂,而且根据网上贴出来的程序,发现有错误。
而我发现对于2元方程来说,用下面的表示方法更直观,更简单。
2元方程并不需要再学习矩阵的相关知识。
)()()()221121211,,,x x x f x x x f x x f x ∂∂+∂∂-=∆ ()()()221121212,x x x x g x ∂+∂-=∆2. 代码(运行环境, VS 2010, WIN 7 64)// Nonlinear.cpp : Defines the entry point for the console application.//#include"stdafx.h"#include<math.h>#include<iostream>using namespace std;int _tmain(int argc, _TCHAR* argv[]){double x1,x2; //变量x1,x2;double x1_0,x2_0; //变量x1,x2迭代前的值double x1_1,x2_1; //变量x1,x2迭代后的值double delta_x1,delta_x2; //变量double function_F,function_G; //方程f(x1,x2) 和g(x1,x2)double F_x1,F_x2; //方程f的偏导double G_x1,G_x2; //方程g的偏导double Error=1e-10; //给定的误差double Error_cout; //用来计算的误差int Steps; //运行步骤int Max_Steps=100000; //最大运行步骤x1 = 0.5;x2 = 0.5; //初始化初值x1_0 = x1;x2_0 = x2;for(Steps=1;Steps<=Max_Steps;Steps++){// 方程组, f(x1,x2), g(x1,x2)function_F = x1_0*x1_0-10.0*x1_0+x2_0*x2_0+8.0; // 10.0的意思是double类型,10 是指整数类型function_G = x1_0*x2_0*x2_0+x1_0-10.0*x2_0+8.0;// 偏导,F_x1 = 2.0*x1_0-10.0;F_x2 = 2.0*x2_0;G_x1 = x1_0*x1_0+1.0;G_x2 = 2.0*x1_0*x2_0-10.0;// 迭代delta_x1 = -function_F/(F_x1+F_x2);delta_x2 = -function_G/(G_x1+G_x2);x1_1 = x1_0 + delta_x1;x2_1 = x2_0 + delta_x2;x1_0 = x1_1; //迭代,将新计算的变量赋值给原始变量x2_0 = x2_1;Error_cout = fabs(delta_x1)+fabs(delta_x2);if(Error_cout<Error)break; //当迭代到某个次数时,变量变化不大的时候就不运行了}printf(" Run steps is %d\n",Steps);printf(" x1 is %lf\n",x1_0);printf(" x2 is %lf\n",x2_0);return 0;}运行结果为:当然,对于有些方程用这个方法是解不了的,大家可以查一下阻尼牛顿法!。
c++ 牛顿迭代法解方程组
c++ 牛顿迭代法解方程组牛顿迭代法是一种求解方程的数值方法,它通过迭代逼近的方式,不断接近方程的解。
首先,我们需要定义要解的方程组。
假设我们要求解的方程组为:f1(x1, x2, ..., xn) = 0f2(x1, x2, ..., xn) = 0...fn(x1, x2, ..., xn) = 0其中,f1, f2, ..., fn是方程组中的各个方程,x1, x2, ..., xn是方程组的未知数。
接下来,我们可以利用牛顿迭代法来求解这个方程组。
具体步骤如下:1. 首先,我们需要给出方程组的初始猜测解。
设初始解为x^(0) = (x1^(0), x2^(0), ..., xn^(0))。
2. 然后,我们计算方程组在初始解处的Jacobi矩阵J^(0),即:J^(0) = [[∂f1/∂x1, ∂f1/∂x2, ..., ∂f1/∂xn],[∂f2/∂x1, ∂f2/∂x2, ..., ∂f2/∂xn],...[∂fn/∂x1, ∂fn/∂x2, ..., ∂fn/∂xn]]其中,∂f/∂x表示方程f对未知数x的偏导数。
3. 接下来,我们计算方程组在初始解处的函数值向量F^(0),即:F^(0) = [f1(x1^(0), x2^(0), ..., xn^(0)),f2(x1^(0), x2^(0), ..., xn^(0)),...fn(x1^(0), x2^(0), ..., xn^(0))]4. 然后,我们可以利用牛顿迭代公式来更新解,即:x^(k+1) = x^(k) - (J^(k))^(-1) * F^(k)其中,x^(k)表示第k次迭代的解,J^(k)表示第k次迭代的Jacobi矩阵,F^(k)表示第k次迭代的函数值向量。
5. 将更新后的解x^(k+1)代入方程组,并重新计算Jacobi矩阵和函数值向量。
6. 重复步骤4和步骤5,直到满足迭代停止的条件。
常见的迭代停止条件有:达到最大迭代次数、解的变化小于某个阈值、函数值的范数小于某个阈值等。
牛顿迭代法求解方程组
牛顿迭代法求解方程组一、牛顿迭代法的基本原理牛顿迭代法是一种用于求解方程的迭代方法,其基本思想是通过不断逼近方程的根来求解方程。
具体而言,对于一个方程f(x) = 0,我们可以选择一个初始近似解x0,然后通过迭代的方式不断更新x 的值,直到满足一定的停止准则为止。
牛顿迭代法的更新公式如下:x_{n+1} = x_n - \frac{f(x_n)}{f'(x_n)}其中,x_n表示第n次迭代得到的近似解,f(x_n)表示方程在x_n处的函数值,f'(x_n)表示方程在x_n处的导数值。
二、牛顿迭代法在求解方程组中的应用牛顿迭代法不仅可以用于求解单个方程,还可以推广到求解方程组的情况。
假设我们要求解一个由m个方程和n个未知数组成的方程组,即F(x) = 0其中,F(x) = (f1(x1, x2, ..., xn), f2(x1, x2, ..., xn), ..., fm(x1, x2, ..., xn))为方程组的向量函数。
我们可以将该方程组转化为一个等价的非线性方程组:f(x) = 0其中,f(x) = (f1(x1, x2, ..., xn), f2(x1, x2, ..., xn), ..., fm(x1, x2, ..., xn))。
牛顿迭代法在求解方程组时的更新公式如下:x_{n+1} = x_n - J^{-1}(x_n) f(x_n)其中,J(x_n)是方程组在x_n处的雅可比矩阵,其定义为:J(x_n) = \begin{pmatrix} \frac{\partial f_1}{\partial x_1}(x_n) & \frac{\partial f_1}{\partial x_2}(x_n) & \cdots & \frac{\partial f_1}{\partial x_n}(x_n) \\ \frac{\partial f_2}{\partial x_1}(x_n) & \frac{\partial f_2}{\partial x_2}(x_n) & \cdots & \frac{\partial f_2}{\partial x_n}(x_n) \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_m}{\partial x_1}(x_n) & \frac{\partial f_m}{\partial x_2}(x_n) & \cdots & \frac{\partial f_m}{\partial x_n}(x_n) \end{pmatrix}三、牛顿迭代法的收敛性和收敛速度牛顿迭代法在求解方程组时具有较好的收敛性和收敛速度。
非线性方程组求解的牛顿迭代法用MATLAB实现
非线性方程组求解的牛顿迭代法用MATLAB实现首先,我们需要定义非线性方程组。
假设我们要求解方程组:```f1(x1,x2)=0f2(x1,x2)=0```其中,`x1`和`x2`是未知数,`f1`和`f2`是非线性函数。
我们可以将这个方程组表示为向量的形式:```F(x)=[f1(x1,x2);f2(x1,x2)]=[0;0]```其中,`F(x)`是一个列向量。
为了实现牛顿迭代法,我们需要计算方程组的雅可比矩阵。
雅可比矩阵是由方程组的偏导数组成的矩阵。
对于方程组中的每个函数,我们可以计算其对每个变量的偏导数,然后将这些偏导数组成一个矩阵。
在MATLAB中,我们可以使用`jacobi`函数来计算雅可比矩阵。
以下是一个示例函数的定义:```matlabfunction J = jacobi(x)x1=x(1);x2=x(2);J = [df1_dx1, df1_dx2; df2_dx1, df2_dx2];end```其中,`x`是一个包含未知数的向量,`df1_dx1`和`df1_dx2`是`f1`对`x1`和`x2`的偏导数,`df2_dx1`和`df2_dx2`是`f2`对`x1`和`x2`的偏导数。
下一步是实现牛顿迭代法。
牛顿迭代法的迭代公式为:```x(k+1)=x(k)-J(x(k))\F(x(k))```其中,`x(k)`是第`k`次迭代的近似解,`\`表示矩阵的求逆操作。
在MATLAB中,我们可以使用如下代码来实现牛顿迭代法:```matlabfunction x = newton_method(x_initial)max_iter = 100; % 最大迭代次数tol = 1e-6; % 收敛阈值x = x_initial; % 初始解for k = 1:max_iterF=[f1(x(1),x(2));f2(x(1),x(2))];%计算F(x)J = jacobi(x); % 计算雅可比矩阵 J(x)delta_x = J \ -F; % 计算增量 delta_xx = x + delta_x; % 更新 xif norm(delta_x) < tolbreak; % 达到收敛条件,停止迭代endendend```其中,`x_initial`是初始解的向量,`max_iter`是最大迭代次数,`tol`是收敛阈值。
python高斯-牛顿迭代法 -回复
python高斯-牛顿迭代法-回复题目:Python高斯牛顿迭代法解析- 优化非线性问题摘要:高斯牛顿迭代法是一种用于求解非线性方程组的优化算法。
本文将介绍高斯牛顿迭代法的原理和使用Python实现的步骤。
我们将以一个简单的实例来说明算法的应用,并解释其背后的数学原理。
最后,我们将讨论高斯牛顿迭代法的优势和局限性。
引言:高斯牛顿迭代法是一种被广泛使用的数值优化算法,用于解决非线性问题。
不同于求解线性方程组的高斯消元法,高斯牛顿迭代法专门用于求解非线性问题。
它的应用领域涵盖了各个科学和工程领域,如计量经济学、计算机视觉和机器学习。
本文将详细介绍高斯牛顿迭代法的原理和实现步骤。
我们将以一个简单的实例来演示算法的工作原理,并对其数学背后的原理进行解析。
一、高斯牛顿迭代法原理高斯牛顿迭代法的目标是通过迭代的方式逼近方程组的根。
为了便于理解,我们以一个简单的二次曲线拟合问题为例。
假设我们有一组观测数据点(xi,yi),我们希望通过一个二次曲线y = a * x^2 + b * x + c来拟合这些数据。
我们的目标是找到最佳的参数a、b 和c,使得拟合曲线与观测数据点的差异最小。
为了达到这个目标,我们可以定义一个误差函数E(a,b,c)来衡量拟合曲线和观测数据点之间的差异。
常见的误差函数有平方和误差函数,即E(a,b,c) = Σ(yi - (a * xi^2 + b * xi + c))^2。
我们的目标是最小化误差函数,即找到使得E(a,b,c)最小的a、b和c。
高斯牛顿迭代法通过迭代的方式逼近最佳参数。
二、高斯牛顿迭代法步骤1. 初始化参数:初始化a、b和c的初始值。
2. 计算雅可比矩阵:雅可比矩阵是误差函数对参数的偏导数矩阵。
对于二次曲线拟合问题,雅可比矩阵J可以表示为:J = [∂E/∂a, ∂E/∂b, ∂E/∂c]3. 计算梯度向量:梯度向量是误差函数在当前参数值处的梯度,即导数。
梯度向量g可以表示为:g = [∂E/∂a, ∂E/∂b, ∂E/∂c]4. 计算海森矩阵:海森矩阵是误差函数对参数的二阶偏导数矩阵。
非线性方程组(简单)
非线性方程组(简单)非线性方程组(简单)非线性方程组是指其中包含非线性方程的一组方程。
与线性方程组不同,非线性方程组的解不一定满足线性性质,因此求解非线性方程组需要采用特定的方法和策略。
1. 概述非线性方程组的一般形式如下:$$\begin{align*}f_1(x_1, x_2, \ldots, x_n) &= 0 \\f_2(x_1, x_2, \ldots, x_n) &= 0 \\&\ldots \\f_m(x_1, x_2, \ldots, x_n) &= 0 \\\end{align*}$$其中,$f_1, f_2, \ldots, f_m$ 是非线性函数,$x_1, x_2, \ldots,x_n$ 是方程组的未知数。
2. 求解方法求解非线性方程组的方法有多种,下面列举了常用的两种方法。
2.1. 牛顿迭代法牛顿迭代法是一种迭代求解非线性方程组的方法,其基本思想是利用导数来逐步逼近方程组的解。
该方法的迭代公式如下:$$x_{k+1} = x_k - \frac{f(x_k)}{f'(x_k)}$$其中,$x_k$ 是第$k$次迭代的近似解,$f(x_k)$ 是方程组在$x_k$处的函数值,$f'(x_k)$ 是方程组在$x_k$处的导数值。
牛顿迭代法需要选择一个初始解$x_0$,然后通过迭代计算,逐步逼近方程组的解。
当迭代次数足够多时,求得的解可接近方程组的实际解。
2.2. 拉盖尔-加普列森方法拉盖尔-加普列森方法是一种逐次迭代的方法,适用于任意不适合牛顿迭代法的非线性方程组。
该方法的迭代公式如下:$$x_{k+1} = x_k - (J_k)^{-1} \cdot f(x_k)$$其中,$x_k$ 是第$k$次迭代的近似解,$f(x_k)$ 是方程组在$x_k$处的函数值,$J_k$ 是方程组在$x_k$处的雅可比矩阵。
拉盖尔-加普列森方法需要选择一个初始解$x_0$,然后通过迭代计算,逐步逼近方程组的解。
牛顿迭代法求解非线性方程组的代码
牛顿迭代法求解非线性方程组非线性方程组如下:221122121210801080x x x x x x x ⎧-++=⎪⎨+-+=⎪⎩ 给定初值()00.0T x =,要求求解精度达到0.000011.首先建立函数()F X ,方程编程如下,将F.m 保存到工作路径中: function f=F(x)f(1)=x(1)^2-10*x(1)+x(2)^2+8;f(2)=x(1)*x(2)^2+x(1)-10*x(2)+8;f=[f(1),f(2)] ;2.建立函数()DF X ,用于求方程的jacobi 矩阵,将DF.m 保存到工作路径中:function df=DF(x)df=[2*x(1)-10,2*x(2);x(2)^2+1,2*x(1)*x(2)-10]; %jacobi 矩阵是一阶偏导数以一定方式排列成的矩阵。
3.编程牛顿迭代法解非线性方程组,将newton.m 保存在工作路径中:clear,clc;x=[0,0]';f=F(x);df=DF(x);fprintf('%d %.7f %.7f\n',0,x(1),x(2));N=4;for i=1:Ny=df\f';x=x-y;f=F(x);df=DF(x);fprintf('%d %.7f %.7f\n',i,x(1),x(2));if norm(y)<0.0000001break;elseendendezplot('x^2-10*x+y^2+8',[-6,6,-6,6]);hold onezplot('x*y^2+x-10*y+8',[-6,6,-6,6]);运行结果如下:0 0.0000000 0.00000001 0.8000000 0.88000002 0.9917872 0.99171173 0.9999752 0.99996854 1.0000000 1.0000000友情提示:范文可能无法思考和涵盖全面,供参考!最好找专业人士起草或审核后使用,感谢您的下载!。
matlab求解非线性方程组
非线性方程组求解1.mulStablePoint用不动点迭代法求非线性方程组的一个根function [r,n]=mulStablePoint(F,x0,eps)%非线性方程组:f%初始解:a%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-6;endx0 = transpose(x0);n=1;tol=1;while tol>epsr= subs(F,findsym(F),x0); %迭代公式tol=norm(r-x0); %注意矩阵的误差求法,norm为矩阵的欧几里德范数n=n+1;x0=r;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend2.mulNewton用牛顿法法求非线性方程组的一个根function [r,n]=mulNewton(F,x0,eps)if nargin==2eps=1.0e-4;endx0 = transpose(x0);Fx = subs(F,findsym(F),x0);var = findsym(F);dF = Jacobian(F,var);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx;n=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);r=x0-inv(dFx)*Fx; %核心迭代公式tol=norm(r-x0);n=n+1;if(n>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend3.mulDiscNewton用离散牛顿法法求非线性方程组的一个根function [r,m]=mulDiscNewton(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=transpose(x0)-inv(J)*fx;m=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;4.mulMix用牛顿-雅可比迭代法求非线性方程组的一个根function [r,m]=mulMix(F,x0,h,l,eps)if nargin==4eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = transpose(x0)-dr; m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));C =D - J;inD = inv(D);H = inD*C;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend5.mulNewtonSOR用牛顿-SOR迭代法求非线性方程组的一个根function [r,m]=mulNewtonSOR(F,x0,w,h,l,eps)if nargin==5eps=1.0e-4;endn = length(x0);J = zeros(n,n);Fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = transpose(x0)-dr;m=1;tol=1;while tol>epsx0=r;Fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endD = diag(diag(J));L = -tril(J-D);U = -triu(J-D);inD = inv(D-w*L);H = inD*(D - w*D+w*L);;Hm = eye(n,n);for i=1:l-1Hm = Hm + power(H,i);enddr = w*Hm*inD*Fx;r = x0-dr; %核心迭代公式tol=norm(r-x0);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endend6.mulDNewton用牛顿下山法求非线性方程组的一个根function [r,m]=mulDNewton(F,x0,eps)%非线性方程组:F%初始解:x0%解的精度:eps%求得的一组解:r%迭代步数:nif nargin==2eps=1.0e-4;endx0 = transpose(x0);dF = Jacobian(F);m=1;tol=1;while tol>epsttol=1;w=1;Fx = subs(F,findsym(F),x0);dFx = subs(dF,findsym(dF),x0);F1=norm(Fx);while ttol>=0 %下面的循环是选取下山因子w的过程r=x0-w*inv(dFx)*Fx; %核心的迭代公式Fr = subs(F,findsym(F),r);ttol=norm(Fr)-F1;w=w/2;endtol=norm(r-x0);m=m+1;x0=r;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endend7.mulGXF1用两点割线法的第一种形式求非线性方程组的一个根function [r,m]=mulGXF1(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);for i=1:nxt = x1;xt(i) = x0(i);J(:,i) = (subs(F,findsym(F),xt)-fx1)/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;8.mulGXF2用两点割线法的第二种形式求非线性方程组的一个根function [r,m]=mulGXF2(F,x0,x1,eps)format long;if nargin==3eps=1.0e-4;endx0 = transpose(x0);x1 = transpose(x1);n = length(x0);fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;m=1;tol=1;while tol>epsx0 = x1;x1 = r;fx = subs(F,findsym(F),x0);fx1 = subs(F,findsym(F),x1);h = x0 - x1;J = zeros(n,n);xt = x1;xt(1) = x0(1);J(:,1) = (subs(F,findsym(F),xt)-subs(F,findsym(F),x1))/h(1);for i=2:nxt = x1;xt(1:i) = x0(1:i);xt_m = x1;xt_m(1:i-1) = x0(1:i-1);J(:,i) = (subs(F,findsym(F),xt)-subs(F,findsym(F),xt_m))/h(i);endr=x1-inv(J)*fx1;tol=norm(r-x1);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;9.mulVNewton用拟牛顿法求非线性方程组的一组解function [r,m]=mulVNewton(F,x0,A,eps)%方程组:F%方程组的初始解:x0% 初始A矩阵:A%解的精度:eps%求得的一组解:r%迭代步数:mif nargin==2A=eye(length(x0)); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendx0 = transpose(x0);Fx = subs(F, findsym(F),x0);r=x0-A\Fx;m=1;tol=1;while tol>epsx0=r;Fx = subs(F, findsym(F),x0);r=x0-A\Fx;y=r-x0;Fr = subs(F, findsym(F),r);z= Fr-Fx;A1=A+(z-A*y)*transpose(y)/norm(y); %调整A A=A1;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end10.mulRank1用对称秩1算法求非线性方程组的一个根function [r,n]=mulRank1(F,x0,A,eps)if nargin==2l = length(x0);A=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-inv(A)*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-inv(A)*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;A1=A+ fr *transpose(fr)/(transpose(fr)*y); %调整A A=A1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end11.mulDFP用D-F-P算法求非线性方程组的一组解function [r,n]=mulDFP(F,x0,A,eps)if nargin==2l = length(x0);B=eye(l); %A取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;B1=B+ y*y'/(y'*z)-B*z*z'*B/(z'*B*z); %调整AB=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end12.mulBFS用B-F-S算法求非线性方程组的一个根function [r,n]=mulBFS(F,x0,B,eps)if nargin==2l = length(x0);B=eye(l); %B取为单位阵eps=1.0e-4;elseif nargin==3eps=1.0e-4;endendfx = subs(F,findsym(F),x0);r=transpose(x0)-B*fx;n=1;tol=1;while tol>epsx0=r;fx = subs(F,findsym(F),x0);r=x0-B*fx;y=r-x0;fr = subs(F,findsym(F),r);z = fr-fx;u = 1 + z'*B*z/(y'*z);B1= B+ (u*y*y'-B*z*y'-y*z'*B)/(y'*z); %调整B B=B1;n=n+1;if(n>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endtol=norm(r-x0);end13.mulNumYT用数值延拓法求非线性方程组的一组解function [r,m]=mulNumYT(F,x0,h,N,eps)format long;if nargin==4eps=1.0e-8;endn = length(x0);fx0 = subs(F,findsym(F),x0);x0 = transpose(x0);J = zeros(n,n);for k=0:N-1fx = subs(F,findsym(F),x0);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endinJ = inv(J);r=x0-inJ*(fx-(1-k/N)*fx0);x0 = r;endm=1;tol=1;while tol>epsxs=r;fx = subs(F,findsym(F),xs);J = zeros(n,n);for i=1:nx1 = xs;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-fx)/h(i);endr=xs-inv(J)*fx; %核心迭代公式tol=norm(r-xs);m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;14.DiffParam1用参数微分法中的欧拉法求非线性方程组的一组解function r=DiffParam1(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);for k=1:NFx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h(i);J(:,i) = (subs(F,findsym(F),x1)-Fx)/h(i);endinJ = inv(J);r = x0 - ht*inJ*Fx0;x0 = r;end15.DiffParam2用参数微分法中的中点积分法求非线性方程组的一组解function r=DiffParam2(F,x0,h,N)%非线性方程组:f%初始解:x0%数值微分增量步大小:h%雅可比迭代参量:l%解的精度:eps%求得的一组解:r%迭代步数:nx0 = transpose(x0);n = length(x0);ht = 1/N;Fx0 = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nxt = x0;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx0)/h(i);endinJ = inv(J);x1 = x0 - ht*inJ*Fx0;for k=1:Nx2 = x1 + (x1-x0)/2;Fx2 = subs(F,findsym(F),x2);J = zeros(n,n);for i=1:nxt = x2;xt(i) = xt(i)+h(i);J(:,i) = (subs(F,findsym(F),xt)-Fx2)/h(i);endinJ = inv(J);r = x1 - ht*inJ*Fx0;x0 = x1;x1 = r;end16.mulFastDown用最速下降法求非线性方程组的一组解function [r,m]=mulFastDown(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0-J*lamda; %核心迭代公式fr = subs(F,findsym(F),r);tol=dot(fr,fr);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;17.mulGSND用高斯牛顿法求非线性方程组的一组解function [r,m]=mulGSND(F,x0,h,eps)format long;if nargin==3eps=1.0e-8;endn = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endDF = inv(transpose(J)*J)*transpose(J);r=x0-DF*fx; %核心迭代公式tol=norm(r-x0);x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;18.mulConj用共轭梯度法求非线性方程组的一组解function [r,m]=mulConj(F,x0,h,eps)format long;if nargin==3eps=1.0e-6;endn = length(x0);x0 = transpose(x0);fx0 = subs(F,findsym(F),x0);p0 = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)*(1+h);p0(:,i) = -(subs(F,findsym(F),x1)-fx0)/h;endm=1;tol=1;while tol>epsfx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;J(:,i) = (subs(F,findsym(F),x1)-fx)/h;endlamda = fx/sum(diag(transpose(J)*J));r=x0+p0*lamda; %核心迭代公式fr = subs(F,findsym(F),r);Jnext = zeros(n,n);for i=1:nx1 = r;x1(i) = x1(i)+h;Jnext(:,i) = (subs(F,findsym(F),x1)-fr)/h;endabs1 = transpose(Jnext)*Jnext;abs2 = transpose(J)*J;v = abs1/abs2;if (abs(det(v)) < 1)p1 = -Jnext+p0*v;elsep1 = -Jnext;endtol=norm(r-x0);p0 = p1;x0 = r;m=m+1;if(m>100000) %迭代步数控制 disp('迭代步数太多,可能不收敛!');return;endendformat short;19.mulDamp用阻尼最小二乘法求非线性方程组的一组解function [r,m]=mulDamp(F,x0,h,u,v,eps)format long;if nargin==5eps=1.0e-6;endFI = transpose(F)*F/2;n = length(x0);x0 = transpose(x0);m=1;tol=1;while tol>epsj = 0;fx = subs(F,findsym(F),x0);J = zeros(n,n);for i=1:nx1 = x0;x1(i) = x1(i)+h;afx = subs(F,findsym(F),x1);J(:,i) = (afx-fx)/h;endFIx = subs(FI,findsym(FI),x0);for i=1:nx2 = x0;x2(i) = x2(i)+h;gradFI(i,1) = (subs(FI,findsym(FI),x2)-FIx)/h;ends=0;while s==0A = transpose(J)*J+u*eye(n,n);p = -A\gradFI;r = x0 + p;FIr = subs(FI,findsym(FI),r);if FIr<FIxif j == 0u = u/v;j = 1;elses=1;endelseu = u*v;j = 1;if norm(r-x0)<epss=1;endendendx0 = r;tol = norm(p);m=m+1;if(m>100000) %迭代步数控制disp('迭代步数太多,可能不收敛!');return;endendformat short;。