信号与系统第二章1
信号与系统课件:第二章 LTI系统
2.1 离散时间LTI系统: 卷积和
(1)用移位单位抽样信号表示离散时间信号 (2)卷积和在离散时间信号LTI系统中的表征 (3)卷积和的计算 (4) 离散时间信号LTI系统的性质
(1)用单位抽样信号表示离散时间信号
x[n] ... x[1] n 1 x[0] n x[1] n 1... x[n][0] x[n 1][1]
(1)初始条件为n<0时,y(n)=0,求其单位抽样响应;
(2)初始条件为n≥0时,y(n)=0,求其单位抽样响应。
解:(1)设x(n) (n),且 y(1) h(1) 0 ,必有
y(n) h(n) 0, n 0
依次迭代
y(0) h(0) (0) 1 y(1) 1 0 1
2
当系统的初始状态为零,单位抽样响应h(n)就 能完全代表系统,那么对于线性时不变系统,任意 输入下的系统输出就可以利用卷积和求得。
差分方程在给定输入和边界条件下,可用迭代 的方法求系统的响应,当输入为δ(n)时,输出 (响应)就是单位抽样响应h(n)。
例:常系数差分方程
y(n) x(n) 1 y(n 1) 2
x[n]u[n] x[k]u[n k] x[k]
k
k
(ii)交换律:
yn xnhn hn xn
例子: 线性时不变系统中的阶跃响应 sn
sn unhn hnun
阶跃输入
输 单位抽样信号 入 响应的累加
n
sn hk
k
(iii)分配律:
xnh1n h2 n xnh1n xnh2 n
y(1) h(1) (1) 1 y(0) 0 1 1
2
22
y(2) h(2) (2) 1 y(1) 0 1 1 (1)2
信号与系统课后题解第二章
⑺
对⑺式求一阶导,有:
de(t ) d 2 i 2 (t ) di (t ) du (t ) =2 +2 2 + c 2 dt dt dt dt de(t ) d 2 i2 (t ) di (t ) =2 + 2 2 + 2i1 (t ) + 2i 2 (t ) 2 dt dt dt
⑻
将⑸式代入⑻式中,有:
λ 2 + 2λ + 1 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1
y h (t ) = C1e −t + C2 te− t
由初始状态为 y (0 ) = 1, y ' (0 ) = 0 ,则有:
C1 = 1 − C 1 + C 2 = 0
由联立方程可得 故系统的零输入响应为:
由联立方程可得 故系统的零输入响应为:
A1 = 2, A2 = −1
y zi (t ) = 2e − t − e −2 t
(2)由原微分方程可得其特征方程为
λ 2 + 2λ + 2 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1 ± i
y h (t ) = e −t (C1 cos t + C2 sin t )
(− 3C1 + 3C2 )δ (t ) + (C1 + C2 )δ ' (t ) − (− 2C1 + C 2 )δ (t ) = δ (t )
(
(
( + C e )δ (t ) + (C e
2 1
)
−2 t
+ C2 e t δ ' (t )
信号与系统第2章信号的复数表示

3
j
π
j
π
4
C1 + C 2 = (1 + 1) + j ( 3 + 1) = 2 + j ( 3 + 1)
2 C1 = 2 + j ( 2 3 ) = 2 2 e
j
= 4e
j
π
3
C1 C 2 = 1 + j 3 + j 3 3 = (1 3 ) + j ( 2 3 )
= 2 2e
j(
π
3
+
π
4
)
= 2 2e
j(
7π ) 12
2 复数中定义 j = 1 ,故 D = (a1a2 b1b2 ) + j(a1b2 + b1a2 )
换一种形式表示复数的乘法
D = C1 C2 = C1 e C2 e = C1 C2 e
j1 j2
= C1 C2 e j1 e j2
j (1 +2 )
复数的加法和乘法在复平面内的表示
复数加法
2、复平面形式
可以在复平面中表示复数
虚轴 b |C| a
复数C可表示成一个矢量
实轴
由图可以看出,矢量 的长度为复数的模,与 实轴的夹角为复数的辐 角
2.3 复数形式的运算
1、复数的数乘和共轭
数乘: k 为实数
虚轴 j
kC C
实轴
kC = ka + jkb
| kC | e j k ≥ 0 kC = | kC | e j ( +π ) k < 0
2、复数的加法和乘法
C1 、 C2 为复数, C1 = a1 + jb1 , C2 = a2 + jb2
信号与系统——泛函分析初步
再如,若一个能量有限信号可以分解成无穷多个分量,即其各分量 平方可和
可证明,按内积构成的内积空间,也是一个Hilbert空间。 Cauchy-Schwarz不等式:为内积空间,,有
定义(和、直和,Sum、Direct sum):
设是的线性子空间,称为子空间的和。如果,即p个子空间彼此无 交集,则这些子空间的和称为直和,记为:。
定理:设是的线性子空间,则 (1)子空间的交也是的子空间; (2)子空间的和也是的子空间; (3)是直和 对于,可唯一表示成
,其中。
§2.3 距离空间(度量空间)
其中,为定义域,为值域。
图2-1 算子的映射作用 定义(数域,Number field):包括0、1且对四则运算封闭 的数集。 定义(泛函,Functional):值域是实/复数域的算子称为 泛函。 注:定积分,距离,范数,内积,函数(第三种定义),(普 通)函数均为泛函。 定义(线性算子):为线性空间,,若对,
Hilbert第六问题:任何物理学理论、物理定 律、实验结论,都可以从一组数学公理出发通
过演绎得到。
希尔伯特第六问题,体现了一种对于统一的追求。
泛函分析:属于基于公理的分析体系,不在于计算,
而着眼于概念演绎,更普适、更一般、更深刻地理
解、解释数学物理问题。
1. 内积空间:
定义(内积,Inner product):设为实或复线性空间,若对 (复数域),均有一实数或复数与之对应,记为,满足:
注意2:满足三条公里的距离定义可以有多种。因此,同一个集合
与不同定义的距离结合,构成不同的度量空间。
信号与系统 梁风梅主编 电子工业出版社 ppt第二章答案

习题二2.1信号cos()t e wt σ可以表示为 st e 与 *s t e 之和,其中 s jw σ=+,*s jw σ=-, 粗略画出下列信号的波形,并在s 平面标出其频率位置。
(1)()cos(3)x t t =(2)3()cos(3)t x t e t -=(3)2()cos(3)t x t e t =(4)2()t x t e -=(5)3()t x t e =(6)()5x t =x (t )50t2.2粗略画出下列信号。
(1)()(3)(5)x t u t u t =---012345tx (t )1(2)()(3)(5)x t u t u t =-+-(3)2(){(3)(5)}x t t u t u t =--- x (t )902535t(4)()2(3)(5)(7)x t u t u t u t =-----2.3简化下列表达式(1)2sin ()()2t x t t t δ=+=0 (2)2()()9jw x jw ωδω+=+=2()9δω (3) ()()2sin 22()14t x t t t πδ⎧⎫-⎨⎬⎩⎭=-+=-1(1)5t δ- (4) sin()()()kw x t w wδ==k ()w δ 2.4 求下列积分(1)()()()x t x t d δτττ+∞-∞=-⎰=()()x t d δττ+∞-∞⎰=x(t) (2) ()()()x t x t d τδττ+∞-∞=-⎰=()()()x t t d x t δττ+∞-∞-=⎰ (3) 313()(23)sin()(23)sin()()222x t t t dt t dt t dt δπδπδ+∞+∞+∞-∞-∞-∞=-=-=--⎰⎰⎰=-12(4) ()()()1jwt x t t e dt t dt δδ+∞+∞-∞-∞===⎰⎰(5) ()(2)(3)(1)(3)(1)x t x t t dt x t dt x δδ+∞+∞-∞-∞=--=--=-⎰⎰(6) ()()()()t tjw x t e d d u t τδττδττ-∞-∞===⎰⎰(7) 3()(1)cos[(3)]sin[(3)]|0t x t t w t dt w w t δ+∞=-∞'=--=-=⎰(8)()(2)cos[(2)]cos[(2)](2)t tx t t w t dt w t d t δδ-∞-∞'=--=--=⎰⎰cos[(2)](2)|(2)cos[(2)]tt w t t t d w t δδ-∞-∞-----⎰1(2)sin[(2)]1tw t w t dt δ-∞=----=⎰2.5(1)求信号2()()t x t e u t -=的偶部与奇部2()()t x t e u t -=-偶部 {}{}2211()()(){()()}22t t Ev x t x t x t e u t e u t -=+-=+- 奇部{}{}2211{()}()()()()22t t Od x t x t x t e u t e u t -=--=--(2)2401|()|4t E x t dt e dt +∞+∞-∞-∞===⎰⎰ 总能量422220111|||()()|2448t t t E Ev dt e u t e u t dt e dt -+∞+∞+∞-∞-∞-∞==+-=⨯⨯=⎰⎰⎰偶部能量 422220111|||()()|2448t t t E Od dt e u t e u t dt e dt -+∞+∞+∞-∞-∞-∞==--=⨯⨯=⎰⎰⎰奇部能量 (3)由第二问可以得出信号的总能量等于其奇部与偶部能量之和。
信号与系统-第2章例题
d2y dy 5 6 y (t ) 4 f (t ) 2 dt dt
ቤተ መጻሕፍቲ ባይዱ
t0
系统的特征方程为 系统的特征根为
s 2 5s 6 0 s1 2,s2 3
yx (t ) K1e—2t K2e—3t
y(0)=yx(0)=K1+K2=1 y' (0)= y'x(0)= 2K13K2 =3
r2 (t ) rzi (t ) 2rzs (t ) [e3t 2sin(2t )]u(t )
解得
rzi (t ) 3e3t u(t )
rzs (t ) [e3t sin(2t )]u(t )
r3 (t ) rzi (t ) rzs (t t0 )
冲激平衡法 冲激平衡法是指为保持系统对应的动态方程式的 恒等,方程式两边所具有的冲激信号函数及其各阶导 数必须相等。根据此规则即可求得系统的冲激响应h(t)。
例:
已知某线性非时变系统的动态方程式为
dy (t ) 3 y (t ) 2 f (t ) dt
试求系统的冲激响应h(t)。
(t 0)
[解] 系统的特征方程为 系统的特征根为 y(0)=yx(0)=K1=1; y'(0)= y'x(0)= 2K1+K2 =3
s 2 4s 4 0
s1 s2 2
(两相等实根)
yx (t ) K1e—2t K2te—2t
解得 K1 =1, K2=5
yx (t ) e2t 5te2t , t 0
2) 求非齐次方程y‘’(t)+6y‘(t)+8y(t) = f(t)的特解yp(t) 由输入f (t)的形式,设方程的特解为
信号与系统课后答案 第2章 习题解

第2章 习 题2-1 求下列齐次微分方程在给定起始状态条件下的零输入响应(1)0)(2)(3)(22=++t y t y dt d t y dt d ;给定:2)0(,3)0(==--y dt dy ; (2)0)(4)(22=+t y t y dt d ;给定:1)0(,1)0(==--y dtd y ;(3)0)(2)(2)(22=++t y t y dt d t y dt d ;给定:2)0(,1)0(==--y dt dy ; (4)0)()(2)(22=++t y t y dt d t y dt d ;给定:2)0(,1)0(==--y dtdy ; (5)0)()(2)(2233=++t y dt d t y dt d t y dt d ;给定:2)0(,1)0(,1)0(22===---y dt d y dt d y 。
(6)0)(4)(22=+t y dt d t y dt d ;给定:2)0(,1)0(==--y dtdy 。
解:(1)微分方程的特征方程为:2320λλ++=,解得特征根:121, 2.λλ=-=- 因此该方程的齐次解为:2()t th y t Ae Be --=+.由(0)3,(0)2dy y dt--==得:3,2 2.A B A B +=--=解得:8, 5.A B ==- 所以此齐次方程的零输入响应为:2()85tty t e e--=-.(2)微分方程的特征方程为:240λ+=,解得特征根:1,22i λ=±.因此该方程的齐次解为:()cos(2)sin(2)h y t A t B t =+.由(0)1,(0)1d y y dx --==得:1A =,21B =,解得:11,2A B ==. 所以此齐次方程的零输入响应为:1()cos(2)sin(2)2y t t t =+.(3)微分方程的特征方程为:2220λλ++=,解得特征根:1,21i λ=-± 因此该方程的齐次解为:()(cos()sin())th y t e A t B t -=+.由(0)1,(0)2dy y dx--==得:1,2,A B A =-= 解得:1,3A B ==.所以齐次方程的零输入响应为:()(cos()3sin())ty t e t t -=+.(4)微分方程的特征方程为:2210λλ++=,解得二重根:1,21λ=-.因此该方程的齐次解为:()()th y t At B e -=+. 由(0)1,(0)2dy y dx--==得:1,2,B A B =-=解得:3, 1.A B == 所以该方程的零输入响应为:()(31)ty t t e -=+.(5)微分方程的特征方程为:3220λλλ++=,解得特征根: 1,21λ=-,30λ=. 因此该方程的齐次解为:()()th y t A Bt C e -=++.由22(0)1,(0)1,(0)2d d y y y dx dt---===得:1,1,22A C B C C B +=-=-=. 解得:5,3,4A B C ==-=-.所以方程的零输入响应为:()5(34)ty t t e -=-+.(6)微分方程的特征方程为:240λλ+=,解得特征根:120,4λλ==-. 因此该方程的齐次解为:4()th y t A Be -=+.由(0)1,(0)2d y y dx --==得:1,42A B B +=-=.解得:31,22A B ==-. 所以此齐次方程的零输入响应为:431()22ty t e -=-.2-2 已知系统的微分方程和激励信号,求系统的零状态响应。
[信号与系统作业解答]第二章
![[信号与系统作业解答]第二章](https://img.taocdn.com/s3/m/90bd92d5240c844769eaeeda.png)
特征方程为 2 3 2 0 ,特征根为 1
1和 2
2。
所以rzi(t) C1e t C2e 2t, t 0
将 rzi(0 ) r (0 ) 2 和rzi(0 ) r(0 ) 1代入可求得
g(t) 1 e 12t cos 3 t 2
1 e 12t sin 3 t u(t)
3
2
由于系统的冲激响应h(t) h(t) e 12t cos 3 t
2
d g(t) ,所以系统的冲激响应为 dt
1 e 12t sin 3 t u(t)
3
2
3)系统的冲激响应满足方程
d dt
h(t)
2h(t)
(t) 3 (t)
电容两端电压不会发生跳变,vc(0 ) vc(0 ) 10V ,所以i(0 ) 0 ;
因此,电阻两端无电压,电感两端电压变成 10V,所以i (0 ) 10 。
(2)换路后系统的微分方程为
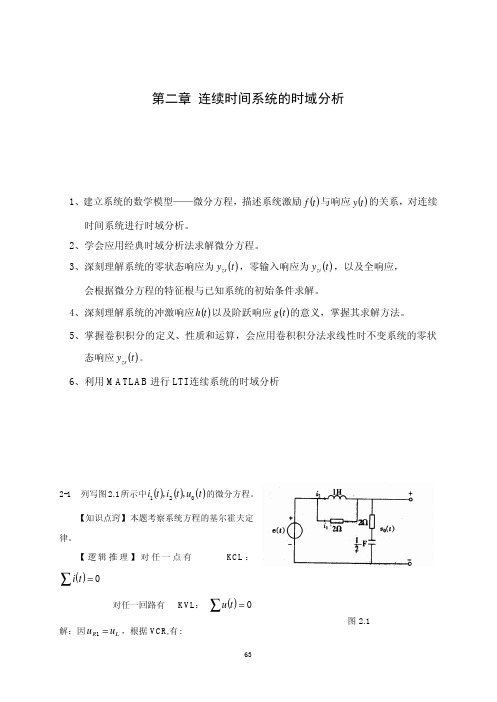
i (t) i (t) i(t) e (t) e(t) 20u(t)
t 0 时间内描述系统的微分方程为
i (t) i (t) i(t) 20 (t)
e(t) (1) 0 (2)
整理得:
2vo(t) 5vo(t) 5vo(t) 3vo(t) 2e (t)
2-4 已知系统相应的齐次方程及其对应的 0+状态条件,求系统的零输入响应。
1)
d2 dt 2
r(t)
2
d dt
r(t
)
2r(t)
0 ,给定r(0 )
1 ,r (0 )
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(t )
f (t T1 ) (t T2 ) f (t T1 T2 )
• 利用卷积的性质可以简化卷积运算,见 书p67
e( )H (t ).d
e( )h(t ).d
例2-9与例2-10
2.6 卷 积
• 两个信号卷积的定义为:
f (t )
f1 ( ) f 2 (t )d
f1 (t ) f 2 (t ) f 2 (t ) f1 (t )
0 • 在电系统中, 状态体现了系统储能元件 的储能情况。包括电容上的起始电压 vc (0 ) 和电感上的起始电流 iL (0 ) • 若电路中无冲激电流(或阶跃电压)作 用与电容以及无冲激电压(或阶跃电流) 作用与电感,则加入激励后,电容两端 的电压和电感两端的电流不会发生突变, 即: v (0 ) v (0 )
g (t ) h( )d
t
Hale Waihona Puke • 求解方程2-37且满足起始状态为零即 可以求得系统的冲激响应。 • 利用冲激响应可以求得LTI系统对任 意激励 e(t)的响应。
e(t ) e( ) (t ).d
r (t ) H e(t H e( ) (t ).d
-1
0 t 1 1
t 1 2
-1
0
1 t 1
t 1 2
“平移”2
“平移”3
“平移”4
“平移”5
y (t )
15 8 9 8 -1 0
t
3 2
1 2
2
2.7 卷积的性质
• 卷积代数 交换律 f 1 (t ) f 2 (t ) f 2 (t ) f 1 (t ) 分配律
f 1 (t ) [ f 2 (t ) f 3 (t )] f 1 (t ) f 2 (t ) f 1 (t ) f 3 (t )
全响应=
零输入响应 + 零状态响应 (解齐次方程) (叠加积分法)
• 齐次解与特解 齐次解满足齐次方程。 t 齐次解的形式满足为 Ae α的值由特征方程2-11决定 A由求解区间内的边界条件决定。
不同特征根所对应的齐次解
特征根
单实根 m重实根
齐次解rh (t )
Ce t Cm 1t m 1e t Cm 2t m 2 e t C1t e t C0 e t
n阶常系数微分方程
• 线性常系数微分方程描述的系统为时不变系统 • 起始状态为零时才是线性时不变系统 • 增量线性系统——任意两个激励信号产生的两 个响应之差是两激励信号之差的系统。
n阶常系数微分方程的求解法
微分方程求解
时域分析法 (经典法)
变换域法 (第五章拉普拉斯变换法)
全响应= 齐次方程通解 + 非齐次方程特解 (自由响应) (受迫响应)
n
kt
B(t )
其中B(t)为特解。
• 线性与时不变性 若系统的起始状态为零,则由常系 数线性微分方程描述的系统是线性 的和时不变的。若起始状态不为零, 由于响应中零输入分量的存在。使 得系统响应对外加激励不满足叠加 性与均匀性,也不满足时不变特性, 同时也是非因果的。
• 全响应还可以分解为瞬态响应与稳 态响应之和的形式。 • 瞬态响应:当t趋于无穷大时,响应 趋于零的那部分响应。 • 稳态响应:当t趋于无穷大时,保留 下来的那部分响应。
2.5 冲激响应与阶跃响应
• 系统在单位冲激信号的激励下产生的零 状态响应称为冲激响应。记为 h (t ) • 系统的冲激响应反映了系统本身的性质。 • 系统在单位阶跃信号的激励下产生的零 状态响应称为阶跃响应。记为 g (t • 冲激响应与阶跃响应的关系如下:)
d h(t ) g (t ) dt
C
u c (t )
R
i (t )
duc (t ) RC uc (t ) 0 dt u c (0 ) U 0
物体的减速运动:
(1-1)
M
u(t)(速度) M Bu(t)(摩擦力)
du(t ) Bu(t ) 0 dt u (0) U 0 (初速度)
(1-2)
对于较复杂的系统,同一系统模型可有多 种不同的数学表现形式。 • 高阶微分方程 --------------称为输入/输出 方程 • 状态方程 ---------------适合于多输入多输 出系统分析(一阶微分方程组)
一阶微分方程组
线性常系数微分方程的求解
一般,对于一个线性时不变系统,其输入与 输出之间关系,总可以用下列形式的微分方程来 描述( 0 t ):
d nr d n1r dr an1 n1 .... a1 a0 r n dt dt dt d me d m 1e de bm m bm 1 m 1 ... b1 b0 e dt dt dt
形式为:
rzi (t ) Azik e
k 1
n
kt
其中常数可由
r (0 )
(k )
确定。
• 零状态响应 不考虑起始时刻系统储能的作用(起始 状态等于零),有系统的外加激励信号 所产生的响应。他是满足方程2-29且起 始状态为零的解,形式为:
rzs (t ) Azsk e
k 1
• 卷积是一种数学运算 • 卷积的物理意义见上节
卷积的图解法——
• 卷积图解法是借助于图形计算卷积 积分的一种基本计算方法。与解析 法相比,图解法使人更容易理解系 统零状态响应的物理意义和积分上 下限的确定。从几何意义来说,卷 积积分是相乘曲线下的面积。
• 图解法具体步骤为
图解法例题 两个信号如图,求卷积
例
u s (t )
i (t )
L
C
R
+ e(t) -
LC
d 2 u c (t ) dt 2
duc (t ) RC u c (t ) u s (t ) dt
若选
i(t ), uc (t )
作为输出,则系统的状态方程为:
duc (t ) 1 i (t ) dt c di 1 R 1 uc i (t ) u s dt L L L
“平移”1
f 2 (t )
2 1
f 2 (t ) 2 1 0.5 f1 ( ) 0.5 11 t 2 2 1
f1 ( )
f 2 (t ) 2 1 0.5 f1 ( )
f 2 (t )
f1 ( )
0.5 1 1 0 t 1 -1 t 2
-1 t 1 0
c c
iL (0 ) iL (0 )
• 例2-5 • 冲激函数匹配法(列 t=0时刻微分方 程) 原理:t=0时刻微分方程两端的冲激 函数及其各阶导数平衡相等。 求解线性常系数微分方程流程图见 图2-5(p54)
2.4 零输入响应与零状态响应
• 零输入响应 没有外加激励信号的作用,只有系统起 始时刻的储能(起始状态)所产生的响 应。它是满足方程2-27及起始状态的解。
第二章 连续时间系统的时域分析
2.1 引 言
• • • • 求解微分方程 零状态响应 零输入响应 卷积
2.2 微分方程的建立与求解
• 微分方程的建立 不同的物理系统,经过抽象和近似,有 可能得到形式上完全相同的数学模型。 例2-1 例2-2
例
S (t=0)
RC电路的零输入响应:
u c (0 ) U 0
并联系统的冲激响应等于各子系统的冲 激响应之和
h1 (t ) x(t )
y (t )
h2 (t )
两个子系统并联
• 结合律
[ f 1 (t ) f 2 (t )] f 3 (t ) f 1 (t ) [ f 2 (t ) f 3 (t )]
• 串联系统的冲激响应等于各子系统 的冲激响应的卷积。
f1 (t ) 1 1 2 -1 0 1
t
f 2 (t ) 2 1
t
1 0 2
1
f1 ( ) 1 1 2 -1 0 1
f 2 ( ) 2 1
f 2 ( ) 2 1
f 2 (t )
2
f1 ( )
1
1 0 2
1
-1
0 1 2
t 1
1 -1 t 2
0
1
“置换”
“反褶”
r (t ) rh (t ) rp (t )
2.3 起始点的跳变
• e(t)在t=0时加入,响应区间为 0 t (k ) • 起始状态( r (0 ) ):激励信号加入之 前瞬时系统的状态,它包含了为计算未 来响应的全部过去信息。 • 初始条件( r (k ) (0 )) :激励信号加入之 后瞬时系统的状态。它决定了完全响应 中常数的值
• 卷积的微分和积分
• 证明见2-48,2-50 • 同理可以导出卷积的高阶导数和多重积 分
• 与冲激函数的卷积
f (t ) (t ) f (t )
f (t )
f (t )
( 1)
(1)
(t ) f
(1)
(t )
( 1)
(t ) f (t ) u(t ) f
一对共轭复根 et C cos(t ) D sin(t ) 12=+ j
特解由激励函数决定,表2-2 • 齐次解-自由响应,由系统本身的特性 决定。例2-3 • 特解-强迫响应,与激励函数的形式有 关。例2-4 • 系统的完全响应包括自由相应和强迫响 应两部分
rh (t ) — —齐次解 自由响应 rp (t ) — —特解 受迫响应 r (t ) 全响应