基于干扰观测器与模糊前馈补偿的随动系统PID控制策略
受扰MIMO系统的前馈-PID最优扰动抑制控制
度, 降低 了 系统 的 可 靠 性 , 同时 还 会 引 入 干 扰 噪 声 , 响原 系统 的动态性 能 , 影 这些 都 阻碍 了基于 状 态反馈 的线性 二次 型最优 控制 在实 际工程 中 的应
摘 要 : 通 过 对 基 于 时域 状 态 空 间描 述 的 MI 系统 最 优 扰 动 抑 制 控 制 算 法和 基 于 输 出反 馈 的频 域 P D控 MO I
制 算 法 的对 比分 析 , 计 出 系统 的 最 优 PD动 态 补 偿 网络 , 设 I 实现 最 优 扰 动 抑 制 控 制 。 仿 真 结 果 表 明 , 方 法 对 于 该
系统 的最优 控 制 问题 , 果 选 择通 常 的无 限 时域 如 二次 型性 能 指 标 , 性 能 指 标 函数 是 不 收 敛 的。 其 所 以选 取 的二次 型平均性 能指 标为 :
1 r
法 与文献 [ ] 出 的二 次型 P D最 优ቤተ መጻሕፍቲ ባይዱ参 数整 定算 5提 I 法相 结合 , 出 了带 外部 持 续 扰 动 的 MI 系统 提 MO
息 , 是 一种 用 二 次型 最优 控 制 算法 优 化 PD动 这 I
态补偿 网络 参数 的方法 , 并从 工程 实用 的角度 , 验 证 了用 基于输 出反馈 的动态补 偿 网络 可 以重构 系 统 状态 信息 , 实现 系统 的最优控 制 。
笔 者 通 过 把 前 馈 一 馈 最 优 扰 动 抑 制 控 制 算 反
法 , 用 PD 动 态 补 偿 网 络 来 重 构 系 统 的 状 态 信 运 I
为矩 阵 G的最 小 多项式 的单根 。
模糊PID控制光电跟踪系统的抗干扰性分析
确定性 系统有较强的鲁棒性 , 引入模型参数摄 动方法, 即增加 外界 干扰 时进行仿真研 究。最终得 到 了系统稳定 的结
论. 为模 糊 自适 应 PD控 制 器 的设 计提 供 了理 论 依 据 I
关 键 词 : 栽 光 电跟 踪 系统 ; 干 扰 性 ; 数 摄 动 ; 定 性 机 抗 参 稳 中 图分 类 号 :r 2 3 P 7 文献标识码 : A 文 章 编 号 :17 — 26 2 1 )2 0 7 — 4 6 4 6 3 (0 12 — 14 0
t e r t a a i r e i n z ya a t eP D o t l r h o e il b ss o v s gf z d p i I c n r l . c f d i u v o e Ke r s ib r ee e t — p c lp i t g a d t c ig s s ms mmu i y wo d :ar o l c o o t a on i n a k n y t n r i n r e ;i nt y;p r me e et r ai n; tb l y a a t rp r b t u o sa i t i
第 1 9卷 第 2 2期
Vo .9 11 No2 .2
电子 设计 工程
El cr ni sg g n e e to c De i n En i e
21 0 1年 1 1月
NO .2 1 V 01
模糊 P D控制 光 电跟踪 系统 的抗干扰性 分析 I
徐 晓 霞
( 安 工 业 大 学 北 方信 息 工程 学 院 电子 信 息 系 , 西 西安 7 0 2 ) 西 陕 10 5
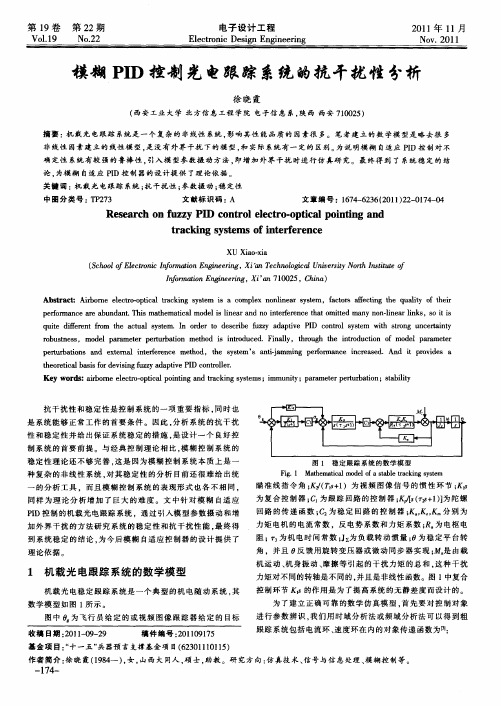
摘 要 : 栽光 电跟 踪 系统 是 一 个 复 杂 的非 线 性 系统 , 响 其 性 能 品 质 的 因 素很 多 。 笔 者 建 立 的 数 学 模 型 是 略 去 很 多 机 影
EMA摩擦前馈补偿的模糊自抗扰控制方法研究

度、传动误差。 如何最大程度的消除非线性摩擦对
分环节做线性组合,继而作用于被控对象,这种处理
EMA 控制精度的影响,一直是众多学者研究的热点
之一 [3 - 5] 。
国内外大量学者对 EMA 的控制方式和谐波减
速器的非线性摩擦补偿做了大量研究。 Spong 等
[6]
首次 提 出 了 柔 性 关 节 的 动 力 学 建 模 方 法。 石 崟
[3]
。 影响
线性控制器,具有结构简单,算法简单,控制参数少,
位 [17] 。 但 PID 控制器误差信号的取法会使系统初
始误差较大,容易引起超调。 使用差分信号近似代
替微分信号,这种处理方式对噪声信号进行了放大,
谐波减速器传动精度的因素主要有:间隙、摩擦、刚
造成微分信号失真严重。 对比例环节、积分环节、微
文献[14] 建立 EMA 的指数摩擦模型,使用摩
献[15] 设计了基于摩擦前馈补偿的控制器,并通过
实验验证了摩擦前馈补偿的有效性,提高了角速率
文献[27] 设计一种新型非线性函数,代替 ADRC 中
和补偿。 文献[28] 提出了一种 PMSM 位置 - 电流
双环控制策略,仿真和实验结果表明,复合型 ADRC
偿的模糊自抗扰控制方法较 PI 控制方法,在空载状态、负载状态下位置跟踪误差的均方根值减少
了约 180、176。
关键词:永磁同步电机;谐波减速器;自抗扰控制;非线性摩擦;前馈补偿;模糊控制;滤波
DOI:10. 15938 / j. emc. 2023. 12. 017
中图分类号:TM351
文献标志码:A
高速和低速下对摩擦损耗进行了建模,通过仿真分
析对建立模型的特性进行了研究。 文献[9] 建立了
12.15基于线性自抗扰控制器的力矩电机伺服系统控制12.15 - 副本
基于自抗扰控制器的力矩电机伺服系统控制刘洋(桂林电子科技大学电子工程与自动化学院,广西桂林541004)摘要:自抗扰控制器能将被控对象的内、外“总扰动”进行估计并用前馈补偿的方法将其抵消,适于力矩电机因直接驱动所带来干扰的补偿与控制。
针对测量噪声对线性自抗扰控制器观测器带宽的限制,提出了二阶线性自抗扰的相似结构(SLADRC),并结合三阶积分链式微分器对其效果进行了对比仿真验证。
力矩电机的仿真控制实验表明,与二阶线性自抗扰算法相比,基于相似结构的改进的力矩电机控制,能在有测量噪声情况下兼顾系统跟踪精度、突加负载时抗扰动性与抗噪性。
关键词:力矩电机;线性自抗扰控制器;测量噪声;扩张状态观测器Performance Analysis and Improvement on LADRC inDirect Drive TorqueMotor Servo SystemLIU Yang(School of Electronic Engineering and Automation,Guilin University of Electronic Technology,Guilin541004,China)Abstruct: Active disturbance rejection controller(ADRC) have the ability to estimate “total disturbance” of the plant including the internal and external disturbance,and the estimation can offset the total disturbance through the method of feedforward.ADRC is appropriatefor the anti-disturbance requirement of direct drive torque motor servo system.For the observer bandwidth limit caused by measurement noise,a similar linear auto disturbance rejection controller(SLADRC) is proposed.We carried out some simulation contrasts to verify the the algorithm combined with third-order integral chained differentiator subsequently.Results of control simulation experiment of torque motor show that,compared with Second-order LADRC, the improved control of torque motor based on the similar structure,was able to balance the tracking precision of the system, load disturbance and noise tolerance under the circumstance of measurement noise.Keywords:torque motor;LADRC;measurement noise;ESO1 引言力矩电机具有堵转力矩大、空载转速低、过载能力强的特点,适合应用于直接驱动负载的场合。
模糊PID复合控制在某武器装备随动系统负载模拟器中的应用研究

Voe. 54. No. 5May.2021第54卷第5期2021年 5月微电机MI/ROMOTORS模糊PID 复合控制在某武器装备负载模拟器中的应用高子龙,张林梅,刘丽龙,曹 杰,李绍隆(上海机电工程研究所,上海201109)摘要:为提高某武器装备随动控制系统的加载精度,针对在力矩加载时,随动负载模拟器将会受到齿轮空回、间隙、局部摩擦、弹塑性变形 矩 动的影响,对 器的 成、工作原理 学模型进行分析,再将 出力矩 函 推导,并将灰预测 控制器中。
真果表明:型控制策度响 、跟 、无 等 ,具有 强的 , PID 控制,满 武器装 精度的随动控制跟踪要求%关键词:随动系统;模型建立;模糊PID ;跟踪精度;仿真中图分类号:TP275文献标志码:A文章编号:1001预848 (2021 )050110-5ResearcC on tie Application of Fuzzy PID Compound Controi c tie LoadSimulator of tie Servo System for a Weapon EquipmertGAO Zilong , ZHANG Linmei , LIU Lilong , CAO Jie , LI Shaolong(Shanghai Electro-mechanical Engineering /加—曲*, Shanghai 201109, China )Abstract : In order to inipoyo the loading accuracy of the seoo contoi system of a weapon equipment ,the sysiem composoioon , wookongpooncopeeand maihemaiocaemodeeooiheeoad s omu ea io owe oe ana eyyed , and iheniheouipuiiooqueioansoeoouncioon wasdeduced , and ihegoeypoedocioon wasmadeou y measuoemeniwas appeoed ioiheconioo e o.Thesomueaioon oesueisshowihaiihecomposoieconiooesioaiegyhasihechaoacieoos-iocsoooasioesponse , accuoaieioackong , nooeeoshooi , sioongoobusine s , supeooooioiheioadoioonaePDDcon- iooe , and can meeiiheioackongoequooemenisoohogh-poecosoon oo e o w-up coniooeoooweapon equopmeni.Key worps : seoo system ; model establishment ; fuzzy PID ; tracking accuracy ; simulatioBo 引言随 国国防的飞展,各型武器装备代,大武器装部队,产的越来越,控制的难度也越来越大,且对被控对象的控制要求也越来越高, 对控制策略的要求也相应提高[1]%为了 武器装备随动控制系统的稳定性、响加载精度,可通过器 随动控制 的相关指标,以很多专家学者对随动控制器 研究部矩加载时,随动控制负器齿轮空回、间隙、局部摩擦、弹塑性变形和干扰力矩动的影响,加 出的力矩跟踪精度不能满足武器装备的高精度要求%(3 ] 了 序次规划法对飞行器尾舵的控制算法化,对控制 的过:力控制 研究; [4 ]对将巴混敏度的控制方法 临近空间飞行器控制器 '研究;文献[5]设计了一种PID 参数自整定加BP 神经网络的控制方法了飞行器舵机的控制;文献[6]通过在电液器上将PID. 控制器 研究; [7 ] 电液 器上对矩控制器研究。
基于扰动观测器的伺服控制器设计及仿真研究
阶跃输入,扰动信号及量测噪声方差为 0.01,无饱和约束,
仿 真
B J = 2.5J n 正弦输入,扰动信号及量测噪声方差为 0.01,无饱和约束,
1
C J = Jn
正弦输入,扰动信号及量测噪声方差为 0.01,饱和约束, D J = Jn
阶跃输入,扰动信号及量测噪声方差为 0.01,无饱和约束, E J = 1.8J n
系统扰动 d,速度量测噪声ζ v ,位置量测噪声ζ y 都取 为白噪声信号,噪声方差见表 1 中的仿真条件。仿真结果附 图所示。其中每个仿真结果的仿真条件见表 1,从仿真结果 可以得到以下结论:
表 1 仿真条件说明
仿真图名称
仿真条件
阶跃输入,扰动信号及量测噪声方差为 0.01,无饱和约束, A J = 1.8J n
误差/mm
误差/mm
(D)
t/s
(E)
t/s
误差/mm
误差/mm
(F)
t/s
t/s (G)
t/s (H)
仿真结果表明:基于扰动观测器的伺服系统在扰动及量测噪声不大,且系统模型参数变化不大的情 况下具有较高的动态性能及较高的跟踪精度并能克服饱和约束的不良影响。
关键词: 扰动观测器; 抗漂移; 状态反馈控制; 伺服系统
文章编号: 1004-731X (2004) 08-1825-03
中图分类号: TP13
收稿日期: 2003-06-28
修回日期: 2003-12-27
基 金 项 目 : 国 家 高 技 术 研 究 发 展 计 划 (863 计划)重大专项项目
(2003AA501100)。
作 者 简 介 : 王 军 平 (1974-), 男, 陕西合阳县人, 博士后, 研究方向为高
基于模糊PID的随动系统优化设计与仿真
图 ’" 模糊逻辑实时整定 $%& 控制器结构图
由 ,$ * # " 4 ! " / * ,$ * , , # " $ ’ & ! " 得 ! " 模糊化 ,$ 8 ’ ,
图 $ 给出了模糊逻辑实时整定 !"# 控制器的结构原理 图, 输入为 %&’(, 输出为 )*+(, !"# 调节器的输出为对象的控制 输入。其原理的数学描述如下:
公式 9" $[ # " 4 ! " : - ; 0 ] ; 对输出量的去模糊化采用重心法即 !# .- $
% !#
/
./
4
& %" 。 ( !# . / ) ( !# . / ) "
/
/" 在随动系统中的应用 设计与仿真
随动系统由雷达信号 变 换电路, 导引头陀螺系统, 伺 服机构, 导引头测角及角度信 号变换电路, 导弹发射控制电 路等组成。建立如下仿真系
[!] 进取得明显效果等 。近年来, 出现了许多参数可自调整的
ED 模糊控制和 !"# 控制原理
模糊控制是以模糊集合论, 模糊语言变量以及模糊逻辑 推理为基础的一种计算机控制方法。在模糊控制中, 模糊控 制器的作用在于通过计算机, 根据由精确量转化来的模糊输 入信息, 按照总结手动控制策略取得的语言控制规则进行模 糊推理, 给出模糊输出判决, 并将其转化为精确量, 送到被控 对象进行控制。模糊控制器的原理图如图 ( 所示。 在 ./0 控制中, 比例系数的作用是加快系统的响应速
设模糊控制器的输入误差为 !, 输入误差变化率 ! " , 误差 量化因子 # ! $ % & !, 误差变化量化因子 # " $ ’ & ! " , 误差的基本 !" ] , 误差所取的 论域 [ ( !, !] , 误差变化率的基本论域 [ ( !" , 模糊集合的论域为 ) $ {( %,( % * , , …,( - ,* - , …, %( ,, %} ( % 为将在 - + ! 范围内连续变化的误差离散后分成的档 数) , 其论域内模糊等级 ,, 表示; 误差变化率所取的模糊集
前馈反馈Smith预估模糊PID组合温度控制算法
doi: 10.11857/j.issn.1674-5124.2020030120前馈反馈Smith 预估模糊PID 组合温度控制算法张 皓1,2, 高瑜翔1,2(1. 成都信息工程大学通信工程学院,四川 成都 610225; 2. 气象信息与信号处理四川省高校重点实验室,四川 成都 610225)e −τs σ摘 要: 针对单纯反馈与传统PID 算法的温度控制系统存在调节时间较长、超调量大、参数调整繁琐、干扰影响严重、闭环稳定性差的问题。
利用前馈控制原理,将干扰测量出来并通过前馈控制器,调节控制量大小,消除干扰影响。
引入Smith 预估补偿器,抵消特征方程中的滞后项,保证大滞后系统的闭环稳定性。
结合模糊PID 算法,实现参数自整定,降低超调量,减少调节时间。
使用Matlab 中的Simulink 工具箱进行仿真验证后结果表明:前馈反馈Smith 预估模糊PID 组合控制算法不仅消除干扰的影响,还保证大滞后系统的闭环稳定性,使超调量降为0,调节时间t s 减少518.02 s 、上升时间t r 减少90.43 s 、延迟时间t d 减少9.6 s ,使整个系统的响应速度更快,稳定性更强。
关键词: 前馈控制; Smith 预估; 模糊PID 中图分类号: TP273+.3;TP273+.4文献标志码: A文章编号: 1674–5124(2020)11–0132–07Temperature control algorithm combined the feedforward feedback withSmith predictor and fuzzy PIDZHANG Hao 1,2, GAO Yuxiang 1,2(1. College of Communication Engineering, Chengdu University of Information Technology,Chengdu 610225, China; 2. Meteorological Information and Signal Processing KeyLaboratory of Sichuan Education Institutes, Chengdu 610225, China)Abstract : Traditionally, the temperature control system uses a classic PID control algorithm which requires complicated parameter adjustment process and long adjustment time. It also holds the limitation of large overshoot, severe interference effects, and poor closed-loop stability. One approach to solving these problems is to utilize feedforward control and predictive compensator to compensate for the disturbance and eliminate control lagging. In this research work, the Smith predictive compensator was introduced to cancel the lag term in the characteristic equation to ensure the closed-loop stability of the large lag system. Meanwhile, combined with the fuzzy PID algorithm, it can not only realize parameter self-tuning but also reduce overshoot and adjustment time. The simulation results using Simulink toolbox in Matlab show that the feedforward feedback Smith predictive fuzzy PID combination control algorithm eliminates the influence of interference, and ensures the closed-loop stability of the large lag system, reducing the overshoot to 0, the adjustment time is reduced by 518.02 s, the rise time is reduced by 90.43 s, and the delay time is reduced by 9.6 s so that the response speed收稿日期: 2020-03-26;收到修改稿日期: 2020-04-24作者简介: 张 皓(1992-),男,四川雅安市人,硕士研究生,专业方向为先进控制与智能控制理论、嵌入式物联网技术。
基于鲁棒PID-模糊复合控制的随动系统研究
K e r s r b s D o to ;f zy c n r l i ltd a n aig o o n o to y wo d : o u tPI c n r l u z o to ;smu a e n e l ;c mp u d c n r l n
t a l i m so e f r n e ft ec m p u d c n r l y tm r e r a l p o e e o h tal t e fp ro ma c so h o o n o to se we er ma k b y i r v d wh n c mp r d s m ae wih t eo iia o to y tm . t h rg n lc n r ls s e
Ab t a t o h o lxt f y a cm o e h o lw- ps s e o ido s i n h tr s r c :F rt ec mp e iyo n mi d l n t ef l d i o u y tm fakn fmisl a d t ei e— e n
Байду номын сангаас
W ANG i,Q1Xiop n Je a — e g,YANG ig M n
( isl n t u e M s i I si t ,Th rFo c gi e ig Unv riy,S n u n 71 8 0,Chn e t eAi reEn ne rn ie st a s a 30 ia)
文 章 编 号 :1 7-1 6 20 )30 7—4 6 35 9 (0 8 0—0 70
基 于 鲁 棒 P D 模 糊 复 合 控制 的随 动 系统 研 究 I一
王 洁 ,齐 晓鹏 ,杨 明
( 空军工程大学 导弹学院,陕西 三 原 730 ) 18 0
受扰MIMO系统的前馈-PID最优扰动抑制控制
受扰MIMO系统的前馈-PID最优扰动抑制控制高德欣;杜厚朋【期刊名称】《化工自动化及仪表》【年(卷),期】2011(038)002【摘要】通过对基于时域状态空间描述的MIMO系统最优扰动抑制控制算法和基于输出反馈的频域PID控制算法的对比分析,设计出系统的最优PID动态补偿网络,实现最优扰动抑制控制.仿真结果表明,该方法对于外部持续扰动具有较强的鲁棒性.%By contrastive analysis of optimal disturbance rejection control algorithm of MIMO systems based on time-domain state-space representatin and of the PID-control algorithm based on frequency-domain output feedback, the system's optimal PID dynamic compensating network was designed to achieve optimal disturbances rejection. Simulation results show that this method has strong robust against external persistent disturbances.【总页数】5页(P134-137,161)【作者】高德欣;杜厚朋【作者单位】青岛科技大学自动化与电子工程学院,山东青岛,266042;江南大学通信与控制工程学院,江苏无锡,214122;青岛科技大学自动化与电子工程学院,山东青岛,266042【正文语种】中文【中图分类】TP13【相关文献】1.受扰线性离散时滞系统的前馈-反馈最优控制 [J], 唐功友;张宝琳;王海红2.受扰非线性离散系统的前馈反馈最优控制 [J], 唐功友;张宝琳3.受扰欠驱动自主水下航行器的最优扰动抑制控制 [J], 杨清;宿浩;唐功友4.受扰线性系统的前馈-反馈最优控制 [J], 唐功友;张颖璐5.含有状态时滞的受扰线性离散系统前馈-反馈最优控制 [J], 赵艳东;刘尚麟因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Keywords:control theory ;servo system ;disturbance observer; fuzzy control ; feed-forward compen
sation
随着当代科技迅猛发展, 随动系统得到广泛应 用, 在其运行过程中, 被控对象( 电机主轴等重要装 置) 随时可能遭受外部施加的未知干扰力矩, 它所 造成的不确定性误差是影响系统跟踪控制性能的 主 要 原 因 [1]。对 此 , 在传统的控制系统中通常采用
姜 尚 ,田 福 庆 ,梁 伟 阁 ,潘 林 豪 ,杨 波
( 海 军 工 程 大 学 兵 器 工 程 系 ,湖 北 武 汉 430033)
摘 要 :针 对 随 动 系 统 在 非 线 性 随 机 力 矩 干 扰 时 输 出 信 号 易 畸 变 的 现 象 ,提 出 一 种 基 于 干 扰 观 测 器 与 模 糊 前 馈 补 偿 的 随 动 系 统 P I D 控 制 策 略 。在 随 动 系 统 “ 三 闭 环 ” 结 构 模 型 的 基 础 上 ,合 理 设 计 干 扰 观 测 器 与 模 糊 前 馈 补 偿 器 ,对 干 扰 力 矩 的 不 确 定 性 误 差 进 行 补 偿 ,经 仿 真 试 验 与 结 果 分 析 ,与 传 统 模 糊 P I D 控 制 策 略 相 比 ,所 提 策 略 能 更 好 地 补 偿 随 动 系 统 在 非 线 性 随 机 力 矩 干 扰 下 的 不 确 定 性 误 差 ,削 弱 模 糊 P I D 控 制 的 抖 振 , 使系统具有良好的跟踪性能与鲁棒性。 关 键 词 :控 制 理 论 ;随 动 系 统 ;干 扰 观 测 器 ;模 糊 控 制 ;前 馈 补 偿 中图分类号: TJ81 + 0 .3 7 6 文献标志码: A 文 章 编 号 : 1673 - 6 5 2 4 (2 0 1 7 ) 0 2 - 0 0 2 9 - 0 6
•30 •
火炮发射扰力矩造成的不 确定性误差进行有效补偿; 干扰观测器结构简洁、 抑制干扰性能突出, 两 者 均 应 用 广 泛 。王 修 岩 等 [ 2 ] 在传统速度前馈补偿的基础上引人干扰观测器, 提 高系统对干扰力矩的抑制能力; 陆 建 山 等 []利用改 进型干扰观测器提高稳定平台随动系统对扰动的 抑制性能; 王 珏 等 []基 于 模 糊 P ID 光 电 跟 踪 系 统 前 馈补偿的控制策略, 降低干扰力矩对控制精度的影 响 。但 在 非 线 性 随 机 力 矩 的 干 扰 下 , 两者的缺陷暴 露 :模 糊 控 制 依 赖 设 计 的 经 验 , 规则库不完整, 导致 控制精度受限, 系统易抖振; 干扰观测器对非建模 动态和系统模型不确定性的控制效果并不理想。
模 糊 P ID 策 略 加 以 抑 制 。模 糊 P ID 控 制 策 略 应 用 较广泛、 技术较成熟, 但它存在对外部干扰适应能 力差等明显问题, 已不能满足高控精度需求, 特别 是难以有效地应用于时变系统。 模糊前馈控制使随动系统具有良好的鲁棒性,
收稿日期: 201 6 -0 5 -0 6 作 者 筒 介 :姜 尚 ( 1992— ) ,男 ,直博研究生,主要从事系统运用于保障工程研究。E-mail: jiangshang1992@
tem deteriorates easily . Aiming at this phenomenon, proposed is a kind of PID control strategy of serve system based on disturbance and fuzzy feed-forward compensation. Based on the three closed loop structure model of servo system,the disturbance observer and fuzzy feed-forward are reasonably de signed to compensate for the uncertain errors of disturbance torque. Through the simulation experiment and the analysis of results and in comparison with the traditional control strategy of fuzzy PID, the pro posed strategy could compensate for uncertain errors better in the presence of nonlinear random torque, weaken the chattering of fuzzy PID control and make the system possess good tracking performance and robustness.
gn1s的状态空间可表示为x1x201kikkdkkpkkdk????????x1x21kdkkpkk2dk????????????y10x1x?????????27gn2s的具体公式为gn2sls2rskpwmkmkpvskiv83干扰观测器的设计在随动系统闭环结构的基础上合理设计干扰观测器能增强对外部干扰的抑制作用并且干扰观测器的稳定性和误差不确定性可控制在较低范围内
PID Control Strategy of Servo System Based on Disturbance Observer and Fuzzy Feed-forward Compensation
JIANG Shang, TIAN Fuqing , LIANG W eige, PAN Linhao, YANG Bo
第 38卷第2 期 2017年 6 月
火炮发射与控制学报
JOURNAL OF GUN LAUNCH & CONTROL
Vol.38 No. 2 Jun.2017
D01:10.19323/ j .issn .1673-6524.2017.02.007
基于干扰观测器与模糊前馈补偿的 随动系统 PID 控制策略
(D epartm ent of W eaponry E ngineering ,Naval University of E ngineering ,W uhan 4 3 0 0 3 3 ,H u b e i ,China)
Abstract :In the presence of nonlinear and random disturbance torque, the output signal of serve sys