自动控制系统校正方法介绍共25页
自动控制系统校正方法介绍共27页
11、获得的成功越大,就越令人高兴 。野心 是使人 勤奋的 原因, 节制使 人枯萎 。 12、不问收获,只问耕耘。如同种树 ,先有 根茎, 再有枝 叶,尔 后花实 ,好好 劳动, 不要想 太多, 那样只 会使人 胆孝懒 惰,因 为不实 践,甚 至不接 触社会 ,难道 你是野 人。(名 言网) 13、不怕,不悔(虽然只有四个字,但 常看常 新。 14、我在心里默默地为每一个人祝福 。我爱 自己, 我用清 洁与节 制来珍 惜我的 身体, 我用智 慧和知 识充实 我的头 脑。 15、这世上的一切都借希望而完成。 农夫不 会播下 一粒玉 米,如 果他不 曾希望 它长成 种籽; 单身汉 不会娶 妻,如 果他不 曾希望 有小孩 ;商人 或手艺 人不会 工作, 如果他 不曾希 望因此 而有收 益。-- 马钉路 德。
61、奢侈是舒适的,否则就不是奢侈 。——CocoCha nel 62、少而好学,如日出之阳;壮而好学 ,如日 中之光 ;志而 好学, 如炳烛 之光。 ——刘 向 63、三军可夺帅也,匹夫不可夺志也。 ——孔 丘 64、人生就是学校。在那里,与其说好 的教师 是幸福 ,不如 说好的 教师是 不幸。 ——海 贝尔 65、接受挑战,就可以享受胜利的喜悦 。——杰纳勒 尔·乔治·S·巴
自动控制系统的校正
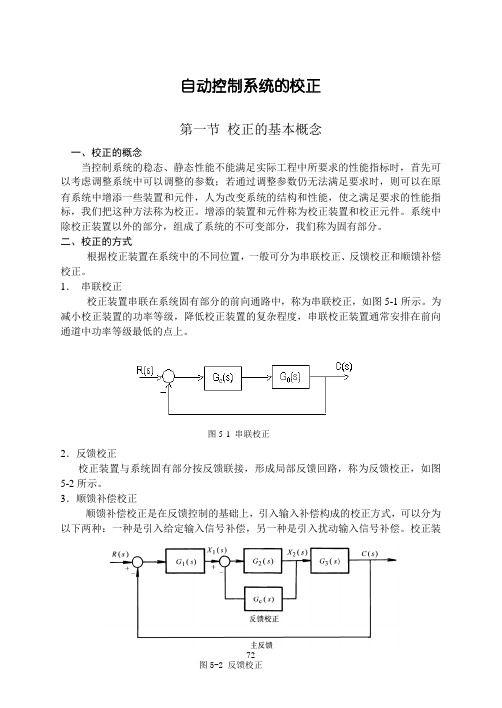
自动控制系统的校正第一节校正的基本概念一、校正的概念当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。
增添的装置和元件称为校正装置和校正元件。
系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。
二、校正的方式根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。
1.串联校正校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。
为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。
图5-1 串联校正2.反馈校正校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。
3.顺馈补偿校正顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。
校正装置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。
从而控制和抵消扰动对输出的影响,提高系统的控制精度。
三、校正装置根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。
1.无源校正装置无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。
根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。
无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。
2.有源校正装置有源校正装置是由运算放大器组成的调节器。
图5-4是几种典型的有源校正装置。
自动控制理论——控制系统的校正
设计步骤 :
(1) 确定K (2) 计算γ0 (3) 计算 (4) 确定 a
(5) 计算ω m (6)确定T (7)验算
• 应用超前校正的几个限制条件:
1、原系统稳定;(否则需要的超前相角 大,噪声对系统干扰严重,甚至可以导 致系统不稳定)
• 闭环系统有自动控制功能,在一定范围 内可以通过调节增益改变系统性能,但 有时不能满足要求。
4、用什么校正? • 校正装置——为了改善系统性能,引入的附
加装置叫作校正装置,也叫补偿器; • 校正装置可以是电气的、机械的、气动的、
液压的或其他形式的元件组成; • 电气的校正装置分为有源的和无源的两种,
第6章 控制系统的校正
6-1 引言 6-2 串联超前校正 6-3 串联滞后校正 6-4 滞后超前校正和PID校正 6-5 反馈校正 6-6 复合校正
6-1 引言
1、系统校正
被控对象确定后,根据要求的控制目标,对
控制器的进行设计的过程叫作系统校正。
R
Gc
对象
Y
2、控制目标——性能指标
3、为什么校正?
K
100
画出未校正系统BODE图
40 L( )
20 0
( ) 0
90 180
10 15
相角裕度 15
测量可得原系统的相角裕度 15 ,所以远 远小于要求值,说明在 K 100 时系统会产生 剧烈的振荡,为此需要增加 40的超前角。
注意:超前校正环节不仅改变了BODE图的 相角曲线,而且改变了幅值曲线,使幅值 穿越频率提高,在新的幅值穿越频率上, 原系统的滞后相角就会增大,这就要求超 前校正装置产生的相角要相应的增大,为 此设计超前相角由增大到 45 。
自动控制系统校正方法
测速—超前网络反馈校正
【例6-3 】设控制系统如图所示。待校正系统 1 K1 = 440s −,伺服电机时间常数 T = 0.025s 开环增益 若要求校正后系统的相角裕度 γ ≥ 50 ,截止 频率ω ≥ 40rad s ,并具有一定的抑制噪声能力, K t' 和 T 2 超前网络时间 试确定测速反馈系数 常数。
ω c' ' = 42 rad s,算出 γ ' ' = 72 0 得
,全部满足指标要求。如 果所得结果不满足指标要求,可以另选 T2 值进行 计算。此外,2 T ' ' 值也可以另行选定。 T (4) 选择测速发电机与无源超前网络。根据下式
T ' ' = T1 + (1 + K1 K t' )T2 − T '
a −1 3 = arcsin = 36.9 o a +1 5
s
故已校正系统的相角裕度:
γ ' ' = ϕ m + γ (ω c' ' ) = 49.7 0 > 45 0 已校正系统的幅值裕度仍为 + ∞ dB,因为其对数 相频特性不可能以某一有限值与 − 180 0 线相交。此 时,全部性能指标均已满足。 下图表征了待校正和已校正系统的尼科尔斯 图。注意到校正后的系统的相角裕度提高,同时闭 环系统的谐振峰值 M r 有所下降。
K1 440 G2 (s) = = ' s(T s +1) s(0.0025s +1)
其对数幅频特性如图中L'2 (ω) 所示。由图得截止频 率ωc' 2 = 420rad s,相角裕度γ = 43.6 < 50。由于截止频率 拉得太宽,抑制噪声能力更加恶化。 (3) 选择等效串联滞后网络参数 T 2 。现取 T2 = 0.1s, 则T ' ' = 1 s ,于是等效串联滞后网络传递函数为:
自动控制原理第六章线性系统的校正方法

对数幅频特性曲线如下图
16
10 3) 预选Gc(s)=τs+1,则 Gk ( s ) = (τs + 1) s ( s + 1)
′ 要求τ使系统满足 γ ′′ 和 ω c′ 的要求。 ′ 选择 ω c′=4.4dB/dec,求τ,则:
" L( wc ) = 20 lg 10 − 20 lg 4.4 − 20 lg 4.4 + 20 lg 4.4τ
1 / 2T 则 Gk ( s ) = s (Ts + 1)
其相频特性为: ϕ (ω ) = −90o − arctan Tω
1 = 63.5o γ (ωc ) = 180 + ϕ (ωc ) = 180 − 90 − arctan T ⋅ 2T
o o o
h=∞
21
∴由 ξ = 0.707 得性能指标为:
2
N R E
串联 校正 控制器 对象
已知被控对象数学模型 G p (s),即根据生产要求而 得到的系统数学模型,称为 固有部分数学模型,在工程 实际中是不能改变的。
C
反馈 校正
根据固有数学模型和性能要求进行分析,若现有闭环情况 下没有满足的性能指标或部分没有满足要求的性能指标,则人 为的在固有数学模型基础上,另加一些环节,使系统全面满足 性能指标要求,这个方法或过程称为校正,也称为系统设计。 所附加的环节被称为控制器,其物理装置称为校正装置。 通常记为Gc(s)
2 2 典型二阶系统可表示为: ωn ωn Φ(s) = 2 Gk ( s) = 2 s ( s + 2ξω n ) s + 2ξω n s + ω n
ξ
19
2 ωn C ( jω ) Φ ( jω ) = = =1 2 2 R ( jω ) ( jω ) + 2ξωn ⋅ jω + ωn 2 ωn
第6章 自动控制系统的校正(改善系统性能的途径)概要
第6章 自动控制系统的校正
第6章 自动控制系统的校正
有源校正装置
有源校正装置是由运放器组成的调节器。 表6-2列出了几种典型的有源校正装置。 有源校正装置本身有增益,且输入阻抗高, 输出阻抗低。它的缺点是线路较复杂,需 另外供给电源(通常需正、负电压源)。
第6章 自动控制系统的校正
第6章 自动控制系统的校正
第6章 自动控制系统的校正
6.1 校正装置
无源校正装置(Passive Compensator) 有源校正装置(Active Compensator)
第6章 自动控制系统的校正
无源校正装置
无源校正装置通常是由一些电阻和电容组 成的两端口网络。表6-1列出了几种典型的 无源校正装置。 无源校正装置线路简单、组合方便、无需 外供电源,但本身没有增益,只有衰减; 且输入阻抗较低,输出阻抗又较高。
Er ( s ) r ( s ) R ( s )
故当取输入信号为单位速度信号时,有: R( s) 1 s 2 这样,系统的稳态误差为: s(0.2s 1)(0.01s 1) 1 1 essr lim s 2 s 0 s(0.2s 1)(0.01s 1) 35 K c s 1 35 K c
穿越频率: c 13.5rad / s
第6章 自动控制系统的校正
其相位稳定裕量:
c 13.5
180 90 arctan( 0.2 13.5) arctan( 0.0113.5)
12.3
由原系统的系统框图,可知该闭环系统的跟随误差函 数为:
1 s(0.2s 1)(0.01s 1) r (s) 35 s(0.2s 1)(0.01s 1) 35 1 s(0.2s 1)(0.01s 1)
第5章自动控制系统的校正
20 s(0.5s 1)
第5章 自动控制系统的校正
40
L() / dB
20 0 - 20 - 40 0°
Lc()
c
c L()
L0()
c()
- 90° - 18 0°0()
12
()
4 6 8 10 20 / (rad/ s)
4060 100 80
图5 - 7 例1 系统的伯德图
() / °
第5章 自动控制系统的校正
第5章 自动控制系统的校正
(4) 由式(5 - 6)求得
1 sinm 1 sinm
1 sin 38 1 sin 38
4.2
(5) 超前校正装置在ωm处的对数幅频值为 Lc(ωm)=10 lgα=10 lg4.2=6.2 dB
在原系统对数幅频特性曲线上找到-6.2 dB处, 选 定对应的频率ω=9 rad/s为ωm, 即ω′c。
第5章 自动控制系统的校正
(4) 根据所确定的φm, 按式(5 - 6)计算出α值。 (5) 在原系统对数幅频特性曲线L0(ω)上找到幅频 值为-10 lgα的点, 选定对应的频率为超前校正装置的 ωm, 也就是校正后系统的穿越频率ω′c。 这样做的道理是: 由图5 - 3知, 超前校正装置在 ωm处的对数幅频值为
综上所述, 超前校正有如下特点: (1) 超前校正主要针对系统频率特性的中频段进行 校正, 使校正后对数幅频特性曲线的中频段斜率为-20 dB/dec, 并有足够的相位裕量。 (2) 超前校正会使系统的穿越频率增加, 这表明校 正后系统的频带变宽, 动态响应速度变快, 但系统抗 高频干扰的能力也变差。
其中:
Gc
(s)
1 Ts
1 Ts
R2 1,
自动控制系统的校正
举一个例子说明校正的作用。 上一章的例5-7:系统的开环传递函数为
6-1 基本概念
横轴的起点坐标选1,取2个十倍频程。 作对数幅频特性渐近线.可确定 作相频特性.
稳定裕量:作伯德图
转折频率 5弧度/秒, 弧度/秒
6-1 基本概念
(如果验证一下,可得 )
这几点确定后可作相频特性曲线,相频曲线和-180°线相交处的频率可从图上确定为
满足要求
经过超前校正后系统的开环传递函数为
8.作校正后系统的伯德图,并求相角裕量
6-2 超前校正
6-2 超前校正
通过这个例子将用伯德图法设计超前校正装置的步骤归纳如下: 根据给定的系统稳态指标,如稳态误差系数,确定开环增益K 绘制未校正系统的伯德图,并计算相角裕量 根据给定的相角裕量 ,计算所需的相角超调量 令 ,并确定 考虑到校正后剪切频率改变所留的裕量,常取 若 ,可用两级超前校正装置串联
二个转折频率5和50相距十倍频程, 时,转折频率为5的惯性环节相角已达-90°,而 时,转折频率为50的惯性环节相角几乎为0,所以有
6-1 基本概念
从伯德图可确定系统的稳定裕量
希望系统的相角裕量 ,但保持开环增益K=10不变. 在这种情况下,通过调整系统的增益,可以使 ,将对数幅频特性下向平移,使其在相角 处与 轴相交.这样做虽然相角裕量达到了要求,但稳态性能指标不能满足要求,开环增益K下降了.所以必须采用校正装置,对系统进行校正.
6-3 迟后校正
它实际上是一个低通滤波器,对低频信号没有衰减作用,但能削弱高频噪音的作用(一般噪音都是高频的)。 值越大,抑制噪音的能力越强。通常选 , 太大,不容易实现。 迟后校正装置的最大迟后角 位于 和 的几何中心 处。
Hale Waihona Puke 6-3 迟后校正用伯德图法进行串联迟后校正 采用串联迟后校正有两种作用 用来提高低频段增益,减小系统的稳态误差.此时基本保持系统的暂态性能不变,也就是稳定裕量不变. 利用迟后校正装置的低通滤波特性所造成的高频衰减,降低系统的剪切频率,提高系统的相角裕量,以改善系统的暂态性能. 在两种情况下都应避免使最大迟后角发生在系统的剪切频率附近.
第6章自动控制系统的综合与校正PPT资料49页
6.1.2 控制系统的校正方法 用频率校正有以下特点。
(1)用频率法校正控制系统,主要是改变频率特性形状,使之具有合适的高频、 中频、低频特性和稳定裕量,以得到满意的闭环品质。
d
图6-5 相位超前网络
d
R1 R2 R1
1
频率特性为
Wc (j)
1
d
jT jT
1 1
校正电路的伯德图如图6-6所示。
d
图6-6 超前校正电路的伯德图
图中
2 = d1
max 12
max
arcsind d
1 1
2.用频率法设计超前校正网络
利用频率法进行超前校正的设计步骤大致如下。
(1)根据稳态性能指标确定系统的开环增益K。 (2)绘制在确定K值下的伯德图,计算出未校正系统的相位裕量。
(2)在初步设计时,常采用伯德(Bode)图来校正系统。
(3)用频率法校正控制系统时,通常是以频率指标来衡量和调整系统的暂态性 能,因而是一种间接的方法。
需要校正的几种基本类型如图6-1所示。
6.1.3 控制系统的性能指标
应根据系统工作的控制系统的性能指标实际需要来确定,对不同系统有所侧重, 如调速系统对平稳性和稳定性精度要求较高,而随动系统则侧重于快速性要求。
0 = − 0 + = 5°~ 20°
(3)根据给定相位裕量,估计需要的附加相角位移,求出超前网络必须提 供的相位超前量。
(4)计算校正网络系数。
m0
d1 1 ssiin n m m
自动控制系统的校正
自动控制系统的校正自动控制系统的校正第一节校正的基本概念一、校正的概念当控制系统的稳态、静态性能不能满足实际工程中所要求的性能指标时,首先可以考虑调整系统中可以调整的参数;若通过调整参数仍无法满足要求时,则可以在原有系统中增添一些装置和元件,人为改变系统的结构和性能,使之满足要求的性能指标,我们把这种方法称为校正。
增添的装置和元件称为校正装置和校正元件。
系统中除校正装置以外的部分,组成了系统的不可变部分,我们称为固有部分。
二、校正的方式根据校正装置在系统中的不同位置,一般可分为串联校正、反馈校正和顺馈补偿校正。
1.串联校正校正装置串联在系统固有部分的前向通路中,称为串联校正,如图5-1所示。
为减小校正装置的功率等级,降低校正装置的复杂程度,串联校正装置通常安排在前向通道中功率等级最低的点上。
图5-1 串联校正2.反馈校正校正装置与系统固有部分按反馈联接,形成局部反馈回路,称为反馈校正,如图5-2所示。
3.顺馈补偿校正顺馈补偿校正是在反馈控制的基础上,引入输入补偿构成的校正方式,可以分为以下两种:一种是引入给定输入信号补偿,另一种是引入扰动输入信号补偿。
校正装置将直接或间接测出给定输入信号R(s)和扰动输入信号D(s),经过适当变换以后,作为附加校正信号输入系统,使可测扰动对系统的影响得到补偿。
从而控制和抵消扰动对输出的影响,提高系统的控制精度。
三、校正装置根据校正装置本身是否有电源,可分为无源校正装置和有源校正装置。
1.无源校正装置无源校正装置通常是由电阻和电容组成的二端口网络,图5-3是几种典型的无源校正装置。
根据它们对频率特性的影响,又分为相位滞后校正、相位超前校正和相位滞后—相位超前校正。
无源校正装置线路简单、组合方便、无需外供电源,但本身没有增益,只有衰减;且输入阻抗低,输出阻抗高,因此在应用时要增设放大器或隔离放大器。
2.有源校正装置有源校正装置是由运算放大器组成的调节器。
图5-4是几种典型的有源校正装置。