03-02空间问题的四面体单元
空间问题的四面体单元
第三章 轴对称、三维和高次单元§ 3-2空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完 全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方 程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题 和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维 有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元 也是多种多样的,其中最简单的是四节点四面体 单元。
采用四面体单元和线性位移模式来处理空 间问题,可以看作平面问题中三角形单元的推广。
在采用四面体单元离散化后的空间结构物 中,一系列不相互重叠的四面体之间仅在节点处 以空间铰相互连接。
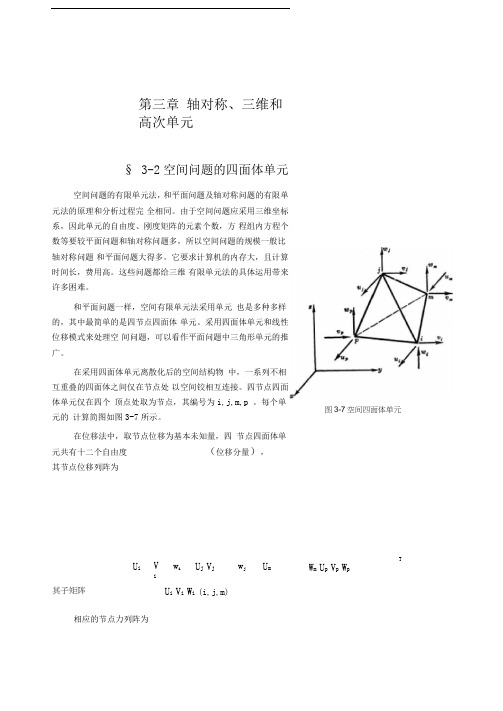
四节点四面体单元仅在四个 顶点处取为节点,其编号为i,j,m,p 。
每个单元的 计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四 节点四面体单元共有十二个自由度 (位移分量),其节点位移列阵为U i V i W i (i,j,m)相应的节点力列阵为U i Viw i U j V j w jU mTW m U p V p W p其子矩阵图3-7空间四面体单元F i F j F m F p其子矩阵F i U i V i w一、单元法位移函数结构中各点的位移是坐标 X 、y 、z 的函数。
当单元足够小时, 单元内各点的位移可用 简单的线性多项式来近似描述, 即u1 2 X3y 4Zv56 X7y 8Z(3-49)w0 10Xny12Z曰2,…,12是卜二个待定系数,它们可由单元的节点位移和坐标确定。
假定节 点 i,j,m,p 的坐标分别为(x i y i Z i )、、(xj y j z j )、(X m将它们代入 (3-49)式的第一式可得各个节点在X 方向的位移U i1 2X i 3Y i4Zu j1 2X j3Y j4Z jU m 1 2X m 3Y m 4 Z mU p12X p3Y p4 Z p解上述线性方程组,可得到1 ,2 ,3 ,4 , 再代入U6V[(a i bXcy d i Z)U i (a jb j x(a m b m X C m yd m z)U m(a p b p X C(3-50)y d p Z )U p ] 1 X i Y i Z i 1 X j y j Z j 1 X m y m Z m1X PY PZ P(3-52)(3-50)式,得y m Z m)、(X p y p Z p ),5y 3)5 (3-51)式中1 ,其中V 为四面体ijmp 的体积,a,b i ,…,c p ,d P 为系数。
第五讲空间问题有限元分析-

(20)
其中任意结点i上的结点载荷
Q ie Q i e x Q i e y Q i e zT N iq d A
(21)
式中, qqx
qy
T
qz
是作用在单元e单位面积上的表面力。
3·体积力的等效结点载荷
P e P i eT P j e T
eT
P m
eT T P n
e 6
6
v
e 6
2)坐标变换
x
8
N i r, s,t xi
y
i1 8
N i r, s,t y i
i1
z
8
N i r, s,t zi
i1
w
e 2
2
v
e 2
u
e 2
图2
w
e 5
5
v
e 5
u
e 5
w
e 7
w
e 1
7
u
e 7
1
v
e 1
u
e 1
z
xy
w
e 8
8
u
e 8
v
e 8
v
e 7
w
e 4
4
v
eT
F m
eT T F n
(18)
其中任意结点i上的结点载荷
F i eF ix e F iy e F iz eTN icG
(19)
式中,G G x Gy G z T是作用在单元e上的集中力; (Ni)c
是形函数Ni在集中力作用点处的取值。
返回
2 ·表面力的等效结点载荷
Q e Q i eT Q j e T Q m eT Q neT T
A 1drcsA 2crds
03-02_空间问题的四面体单元
第三章轴对称、三维和高次单元§3-2 空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元也是多种多样的,其中最简单的是四节点四面体单元。
采用四面体单元和线性位移模式来处理空间问题,可以看作平面问题中三角形单元的推广。
在采用四面体单元离散化后的空间结构物中,一系列不相互重叠的四面体之间仅在节点处以空间铰相互连接。
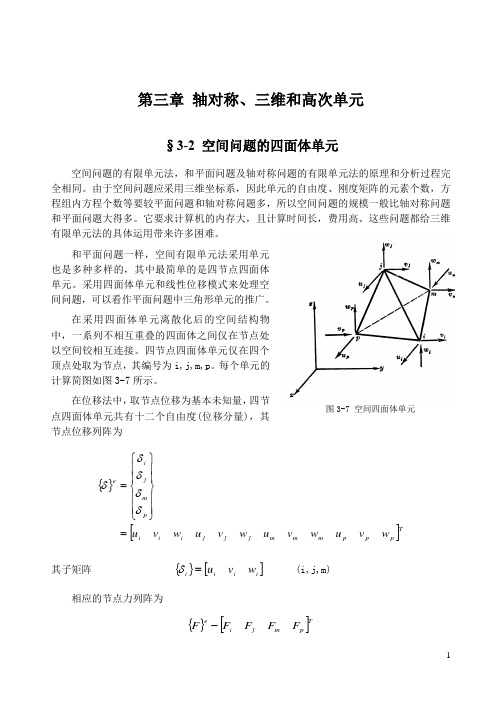
四节点四面体单元仅在四个顶点处取为节点,其编号为i,j,m,p。
每个单元的计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四节点四面体单元共有十二个自由度(位移分量),其节点位移列阵为{}[]Tpp p m m m j j j i i ip m j i ew v u w v u w v u w v u =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=δδδδδ其子矩阵 {}[]i iii w v u =δ (i,j,m)相应的节点力列阵为{}[]Tp mj ie F F F F F -图3-7 空间四面体单元其子矩阵 {}[]Ti i i i W V U F =一、单元法位移函数结构中各点的位移是坐标x 、y 、z 的函数。
当单元足够小时,单元内各点的位移可用简单的线性多项式来近似描述,即⎪⎭⎪⎬⎫+++=+++=+++=z y x w z y x v z y x u 121110087654321αααααααααααα (3-49) 式中1α,2α,…,12α是十二个待定系数,它们可由单元的节点位移和坐标确定。
假定节点i,j,m,p 的坐标分别为(i x i y i z )、(j x j y j z )、(m x m y m z )、 (p x p y p z ),将它们代入(3-49)式的第一式可得各个节点在x 方向的位移⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=+++=p p p p m m m m j j j j i i i i z y x u z y x u z y x u z y x u 4321432143214321αααααααααααααααα (3-50)解上述线性方程组,可得到1α,2α,3α,4α,再代入(3-50)式,得])()()()[(61p p p p p m m m m m jj j j j i i i i i u z d y c x b a u z d y c x b a u z d y c x b a u z d y c x b a Vu +++-+++++++-+++=(3-51) 其中V 为四面体ijmp 的体积,a i ,b i ,…,c p ,d p 为系数。
空间几何中的平行四面体

空间几何中的平行四面体在空间几何学中,平行四面体是一个非常重要的概念。
它是由四个平行的且不在同一平面的三角形构成的多面体。
本文将介绍平行四面体的定义及性质,并给出一些相关的例子和应用。
一、平行四面体的定义平行四面体是由四个平行的且不在同一平面的三角形所组成的多面体。
它具有以下特点:1. 四个面都是三角形。
2. 相邻两个面之间的边都是平行的。
3. 任意两个不相邻的面之间的距离是相等的。
二、平行四面体的性质1. 平行四面体的对棱平行且相等。
对任意的棱AB和CD,若AB ∥ CD,则有AB=CD。
2. 平行四面体的对顶角平等。
对任意的顶点O和底面P,若∠AOC=∠BOD,则有∠DOP=∠COP。
3. 平行四面体的任意两个面之间的距离相等。
对于任意的两个面ACDF和BCEF,有AC=BD。
4. 平行四面体的四条棱构成的四面体是平行四面体,且与原平行四面体全等。
5. 平行四面体的底面积乘以高等于体积。
设底面为底的面积为S,其高为H,则平行四面体的体积V=SH/3。
三、平行四面体的例子1. 双峰山:双峰山位于中国的广东省韶关市。
它的山势独特,由四个平行的山脊组成,形成了一个平行四面体的形状。
2. 锡尔河四面体:位于俄罗斯的锡尔河口以北,是一个由四条平行的山脉组成的地貌景观。
3. 钻石:钻石的晶体结构可以看作是一个平行四面体的形状,钻石的每个面都是一个等边三角形。
四、平行四面体的应用1. 三维建模:在计算机图形学和三维建模领域,平行四面体常被用于表示物体的三维空间结构。
2. 计算几何:平行四面体是计算几何中的重要概念,可以用来求解空间中的各种几何问题。
3. 数学教学:在数学教学中,通过平行四面体的例子可以引导学生理解三维空间的概念,并进行相关的几何推理。
总结:平行四面体是空间几何学中的一个重要概念,它由四个平行的且不在同一平面的三角形组成。
它具有一系列独特的性质,如对棱平行且相等、对顶角平等等。
平行四面体在实际生活中也有很多应用,如三维建模、计算几何等。
空间几何的性质四面体的性质及其应用

空间几何的性质四面体的性质及其应用四面体是空间中常见的立体图形,它具有一些独特的性质和应用。
本文将介绍四面体的性质及其应用。
一、四面体的定义和性质四面体是由四个三角形面组成的立体图形。
它具有以下性质:1. 定义:四面体是由四个不在同一平面上的点及连接这些点的边组成的立体。
2. 面积和体积:四面体的表面积和体积可以通过一定的公式计算得出。
其中,表面积等于四个三角形面积之和,体积等于底面积乘以高的一半。
3. 棱和顶点:四面体有六条棱和四个顶点。
任意两个顶点之间可以连接一条棱。
4. 高、中线和外接球:四面体的高是从一个顶点到相对的底面的垂直距离。
每个面的中线是连接该面上的两个中点的线段。
四面体还可以围绕外接球,外接球的球心与四面体的顶点都在同一平面上。
二、四面体的分类根据四面体的性质,我们可以将其分为以下几类:1. 正四面体:如果四面体的四个面都是等边三角形,那么它就是正四面体。
正四面体具有对称性,在空间几何学中起到重要作用。
2. 正交四面体:如果四面体的三个互相垂直的棱对同时相等,那么它就是正交四面体。
正交四面体具有一些特殊的性质,常用于计算几何和物理学中。
3. 锐角四面体和钝角四面体:根据四个顶点形成的凸四面体的内角是锐角还是钝角,可以将四面体分为两类。
在实际应用中,这些分类有助于确定四面体的稳定性和结构特征。
三、四面体的应用四面体不仅具有美学价值,还在许多领域有实际应用:1. 建筑与工程学:在建筑设计和工程施工中,四面体的结构特性可以用于设计和计算支撑结构的强度和稳定性。
2. 化学与结晶学:在化学和结晶学研究中,四面体被广泛用于分子和晶体的描述和分析。
3. 三维造型与动画:计算机图形学中,四面体被用于表示和生成三维模型和动画效果。
4. 数学与几何学:四面体是数学和几何学中研究的重要对象之一,对于解决空间几何问题和推导数学定理有重要意义。
总结:四面体是空间几何中重要的立体图形,具有独特的性质和应用。
空间中的平行四面体的性质
空间中的平行四面体的性质平行四面体是一个特殊的多面体,它由四个平行的三角面构成。
在本文中,我们将探讨空间中平行四面体的性质和特点。
一、定义和基本性质平行四面体是一个具有四个平行的三角面的多面体。
它的基本性质如下:1. 四条边两两平行,相交于四个顶点。
2. 四个面都是三角形,且两两平行。
3. 任意两个相对的面是全等三角形。
4. 任意两个相邻的面之间的夹角相等。
二、四面体的种类根据顶点的不同位置和性质,平行四面体可以分为以下几种种类:1. 正四面体:四个面都是全等正三角形的平行四面体。
2. 斜四面体:四个面不全等,即至少存在两个不全等的面的平行四面体。
3. 直角四面体:存在一个直角的平行四面体。
4. 锐角四面体:所有面上的夹角均为锐角的平行四面体。
5. 钝角四面体:至少存在一个钝角的平行四面体。
三、平行四面体的性质除了基本性质外,平行四面体还具有一些其他的性质和特点。
1. 高度和底面积关系:平行四面体的高等于它的底面的面积乘以底面到对立面的距离。
2. 体积计算公式:平行四面体的体积等于底面积乘以高度的一半。
3. 对角线关系:平行四面体的对角线分别为刚好连接两个对立顶点的线段,两个对角线的交点位于中心。
4. 对称性质:平行四面体对称于它的中心点。
四、平行四面体的应用平行四面体的性质在实际应用中有重要的意义。
1. 体积计算:平行四面体的体积计算公式可以应用于建筑、工程等领域的体积计算。
2. 结构稳定性:平行四面体在一些结构中被用于提高稳定性和均衡性,例如桥梁和塔楼的设计。
3. 几何推理:平行四面体的性质可以用于几何推理和证明,对于数学学科具有重要意义。
结论:空间中的平行四面体是一个具有四个平行的三角面的多面体,它具有诸多特点和性质,包括边的平行性、面的平行性、对称性以及体积计算等。
平行四面体的性质在实际应用中具有重要的意义,对于建筑、工程和数学等学科都有一定的应用价值。
通过研究和理解平行四面体的性质,我们可以拓展对立体几何的认识,并应用于实际问题的解决中。
空间四面体的外接球和内切球问题
空间四面体的外接球和内切球问题
概述
空间四面体的外接球和内切球问题是几何学中的一个重要问题。
外接球是指与四面体的四个顶点都接触的球,内切球则是指与四面
体的每个面都相切的球。
这两个球体在几何学和物理学中都有广泛
的应用。
外接球的存在性和唯一性
对于任意给定的四面体,是否存在一个与之外切的球?答案是
肯定的。
根据几何学原理,四面体的外接球的球心一定位于四个顶
点的垂直平分面的交点上。
而外接球的半径等于球心与任意一个顶
点的距离。
内切球的存在性和唯一性
同样,对于任意给定的四面体,是否存在一个与之内切的球?
答案也是肯定的。
内切球的球心一定位于四个面的角平分线的交点上,而内切球的半径等于球心到四个面的距离的最小值。
解决方法
虽然存在多种方法来计算空间四面体的外接球和内切球,但最
常用的方法是使用线性代数和解析几何的技巧。
通过分析四面体的
顶点坐标和面的方程,可以求解外接球和内切球的半径和球心坐标。
应用领域
空间四面体的外接球和内切球在许多领域都有应用,比如计算
机图形学、物理学和工程学。
在计算机图形学中,外接球和内切球
可以用来优化渲染技术和三维模型的建模。
在物理学中,外接球和
内切球可以用来分析四面体的形状和体积。
在工程学中,外接球和
内切球可以用来优化结构设计和空间布局。
结论
空间四面体的外接球和内切球问题是一个重要且有趣的几何学
问题。
通过使用适当的解决方法和分析工具,我们可以计算出外接
球和内切球的半径和球心坐标,并在实际应用中发挥重要的作用。
空间几何中的相似四面体性质
空间几何中的相似四面体性质相似四面体是空间几何中一种重要的几何体,它具有一些独特的性质和特点。
本文将从四面体的定义入手,介绍相似四面体的基本概念、性质和应用。
一、四面体的定义四面体是由四个不在同一平面上的点所确定的多面体,它有四个面、六条棱和四个顶点。
四面体的六条棱两两相交于一点,这个点被称为四面体的顶点。
二、相似四面体的定义相似四面体是指具有相似形状但不一定相等的四个三角面的四面体。
当四面体的对应边成比例时,我们可以称它们为相似四面体。
三、相似四面体的性质1. 相似比例相似四面体的相似比例是指两个相似四面体的对应边的比值相等。
假设有两个相似四面体ABCD和A'B'C'D',则它们的相似比例可以表示为AB/A'B' = AC/A'C' = AD/A'D' = BC/B'C' = BD/B'D' = CD/C'D'。
2. 体积比相似四面体的体积比是指两个相似四面体体积的比值等于它们的边长比的三次方。
假设有两个相似四面体ABCD和A'B'C'D',它们的体积比可以表示为(Volume ABCD)/(Volume A'B'C'D') = (AB/A'B')^3 = (AC/A'C')^3 = (AD/A'D')^3 = (BC/B'C')^3 = (BD/B'D')^3 = (CD/C'D')^3。
3. 高度比相似四面体的高度比是指两个相似四面体相应高度的比值等于它们的边长比,也等于它们的体积比的三次方根。
四、相似四面体的应用1. 尺规作图相似四面体的性质可以应用于尺规作图中。
例如,给定一个已知的四面体,利用相似四面体的性质,我们可以通过尺规作图构造出与给定四面体相似的另一个四面体。
空间问题的四面体单元
第三章 轴对称、三维和高次单元§3-2 空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元也是多种多样的,其中最简单的是四节点四面体单元。
采用四面体单元和线性位移模式来处理空间问题,可以看作平面问题中三角形单元的推广。
在采用四面体单元离散化后的空间结构物中,一系列不相互重叠的四面体之间仅在节点处以空间铰相互连接。
四节点四面体单元仅在四个顶点处取为节点,其编号为i,j,m,p 。
每个单元的计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四节点四面体单元共有十二个自由度(位移分量),其节点位移列阵为{}[]Tpp p m m m j jj i i ip m j i ew v u w v u w v u w v u =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=δδδδδ其子矩阵 {}[]i ii i w v u =δ (i,j,m)相应的节点力列阵为{}[]Tp m j ie F F F F F -图3-7 空间四面体单元其子矩阵 {}[]Ti i i i W V U F =一、单元法位移函数结构中各点的位移是坐标x 、y 、z 的函数。
当单元足够小时,单元内各点的位移可用简单的线性多项式来近似描述,即⎪⎭⎪⎬⎫+++=+++=+++=z y x w z y x v z y x u 121110087654321αααααααααααα (3-49) 式中1α,2α,…,12α是十二个待定系数,它们可由单元的节点位移和坐标确定。
假定节点i,j,m,p 的坐标分别为(i x i y i z )、(j x j y j z )、(m x m y m z )、 (p x p y p z ),将它们代入(3-49)式的第一式可得各个节点在x 方向的位移⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=+++=p p p p m m m m j j j j i i i i z y x u z y x u z y x u z y x u 4321432143214321αααααααααααααααα (3-50)解上述线性方程组,可得到1α,2α,3α,4α,再代入(3-50)式,得])()()()[(61p p p p p m m m m m jj j j j i i i i i u z d y c x b a u z d y c x b a u z d y c x b a u z d y c x b a Vu +++-+++++++-+++=(3-51) 其中V 为四面体ijmp 的体积,a i ,b i ,…,c p ,d p 为系数。
空间几何中的四面体与四面体的性质
空间几何中的四面体与四面体的性质四面体是空间几何中的一个基本几何体,它由四个面组成,每个面都是一个三角形。
四面体的性质十分有趣,它们在数学和几何中有广泛的应用。
本文将介绍四面体的定义、特征以及一些重要的性质。
一、四面体的定义和构造四面体的定义很简单:它是一个具有四个面的立体,且每个面都是一个三角形。
这四个面彼此相邻,共享边。
通过四个顶点,可以唯一地确定一个四面体。
构造四面体有多种方法,下面介绍两种常见的方法。
1. 顶点法构造:选取空间中的四个点作为四面体的顶点,通过连接这四个点,就可以构造出一个四面体。
2. 剖分法构造:将一个三角形沿着一个内部点作剖分,得到四个小三角形。
这四个小三角形的边即为四面体的边,而原来的三角形则成为四面体的底面。
无论是哪种构造方法,生成的四面体都具有相同的性质和特征。
二、四面体的性质1. 顶点、边、面和体积:一个四面体有四个顶点、六条边、四个面。
其中每个面都是一个三角形,每个顶点都是三条边的交点。
四面体的体积可以通过海伦公式来计算,该公式将四面体的面积和边长联系在一起。
设四面体的底面积为S,底面和顶点的距离为h,则四面体的体积V可以通过如下公式求得:V = (1/3) * S * h。
2. 共面性:四面体的四个顶点不共面,也就是说它们不会在同一个平面上。
这个性质使得四面体与其他几何体有所区别。
3. 高度和正交性:对于任意一个面,可以通过顶点引垂线得到一条高。
同时,四面体的相邻面也满足正交关系,即相交直线互相垂直。
4. 对称轴和中线:四面体具有对称轴和中线。
对称轴是通过两个相对的棱的中点连接而成的直线,它可以将四面体分为两个对称的部分。
中线则是通过两个相对的顶点的中点连接而成的直线。
5. 欧拉公式:对于一个凸四面体,其顶点数、边数和面数满足欧拉公式:顶点数 + 面数 = 边数 + 2。
四、特殊类型的四面体1. 正四面体:四个等边三角形组成的四面体称为正四面体。
正四面体具有以下特点:所有边长相等,任意两条边的夹角为60度,底面上的高相等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 轴对称、三维和高次单元§ 3-2空间问题的四面体单元空间问题的有限单元法,和平面问题及轴对称问题的有限单元法的原理和分析过程完 全相同。
由于空间问题应采用三维坐标系,因此单元的自由度、刚度矩阵的元素个数,方 程组内方程个数等要较平面问题和轴对称问题多,所以空间问题的规模一般比轴对称问题 和平面问题大得多。
它要求计算机的内存大,且计算时间长,费用高。
这些问题都给三维 有限单元法的具体运用带来许多困难。
和平面问题一样,空间有限单元法采用单元 也是多种多样的,其中最简单的是四节点四面体 单元。
采用四面体单元和线性位移模式来处理空 间问题,可以看作平面问题中三角形单元的推广。
在采用四面体单元离散化后的空间结构物 中,一系列不相互重叠的四面体之间仅在节点处 以空间铰相互连接。
四节点四面体单元仅在四个 顶点处取为节点,其编号为i,j,m,p 。
每个单元的 计算简图如图3-7所示。
在位移法中,取节点位移为基本未知量,四 节点四面体单元共有十二个自由度 (位移分量),其节点位移列阵为U i V i W i (i,j,m)相应的节点力列阵为U iViw iU j V jw jU m TW m U p V p W p其子矩阵图3-7空间四面体单元F i F j F m F p VV其子矩阵F i U i V i w一、单元法位移函数结构中各点的位移是坐标X、y 、z 的函数。
当单元足够小时, 单元内各点的位移可用简单的线性多项式来近似描述, 即u1 2 X 3y 4Zv56 X 7y 8Z(3-49)w0 10Xny12Z曰2,…,12是卜二个待定系数,它们可由单元的节点位移和坐标确定。
假定节 点 i,j,m,p 的坐标分别为(x i y iZ i )、、(xjy j z j )、(X m将它们代入 (3-49)式的第一式可得各个节点在X 方向的位移U i1 2X i 3Y i 4Zu j1 2X j3Y j4Z jU m1 2X m 3Y m 4 Z mU p12X p3Y p4 Z p解上述线性方程组,可得到1 ,2 ,3 ,4 , 再代入U6V[(a i bXcy d i Z)U i (a jb j x(a m b m X C m yd m z)U m(a p b p X C(3-50)y d p Z )U p ] 1 X iY i Z i 1 X j y j Z j 1 X m y m Z m1 X PY PZ P(3-52)(3-50)式,得y m Z m)、(X p y p Z p ),5y 3)5 (3-51)式中1 ,其中V 为四面体ijmp 的体积,a,b i ,…,c p ,d P 为系数。
为了使四面体的体积 v 不致为负值,单元四个节点的标号 在右手坐标系中,要使得右手螺旋在按照3-1中单元那样。
综合表达式(3-51)、(3-54)及(3-55),可以将位移分量表示成为Tef u v w[ N ]IN i IN j IN m IN pe(3-56)其中1是三阶的单位矩阵, [N]为形函数矩阵,而各个形函数为N i (a i b i x c i y d i z)/6V(i,m) (3-57)N j (a b i x c y d i z)/6V (j, p)1 , 5 , 6代表刚性移动U 0 , V 0 , W o ;系6个系数反映了刚性转动 W x , W y , W z 和常量剪应变。
这就是说,12个系数充分反映了单元的刚体位移和常量应变。
同时,可以证明: 由于位移模式是线性的, 两个相邻单元的共同边界在变形过程中,始终是相互贴合的,使 得离散的模型变形中保持为连续体。
这样,选用的位移函数满足收敛的充分必要条件,保 证了有限单元法解答收敛于精确解。
a i (i,j,m,p) (3-53) Cii,j,m,pi T j T m 的转向转动时, 必须按照一定的顺序:向 p 的方向前进,象图用同样方法, 可以得出其余二个位移分量:16V(a m 1 6V(a m [(a i b i x cy d i Z)v (a j b j X C j y d j Z)V jb m X C m Yd m Z)V m (a p b p X C p y d p Z)V p ][(a i b i x qy d j Z )w (a j b j X c I Y d j Z)W jb m X C m Y d m Z)W m (a p b p X C p y d p Z)W p ]和平面问题相似,(3-49)式中的系数12代表常量的正应变;其余(3-54)(3-55)二、载荷移置空间问题的单元载荷移置和平面问题一样,也是根据静力等效原则,将不作用在节点上的集中力、体力、面力移置成作用在节点上的等效节点载荷。
其通用公式的形式和平面问题也是一样的,只不过多出一维空间分量。
1.集中力T设单元上某点(x,y,z)作用有集中力P P x P y P z则仍然得到等效节点载荷R [N]T P (3-58)这里eR [X i Y 乙X j Y j Zj X m Y m Z mX p Y p Z p]2.分布体力单元上作用有分布体力P [X Y Z]T,则R e[N]T PdV(3-59)其中dV是单元中的微分体积,对于直角坐标糸上式为R e[N]T p dxdydz(3-60) e3.分布面力单元的某一边界面S上作用有一分布面力P X Y Z TR e [N]T P dA其中dA是边界面S上的微分面积。
4.常见载荷的移置上列公式是空间问题载荷移置的通用公式。
对于四节点四 面体单元,由于其采用线性位移模式, 采用直接计算虚功的方 法求出节点载荷比较简单。
下面介绍常见的二种载荷的移置。
⑴重力四面体单元的自重为 W 作用在质心C 处(如图3-8)。
为 求得节点载荷 X,Y i ,Z i ,可分别假想发生 u * 1 , V * 1或 w *1的虚位移。
在U i* 1或V * 1时,整个单元上各点的均没有 z 方向上的虚位移,重力 W 不做功,所以 X=Y i =O 。
*1“WW c 7, Z i44对于其余三个节点可得同样结论,于是有e R i0 0TW (i,j,m,p)4即,对于四节点四面体单元承受的重力载荷,只需要把共(2)界面压力设四面体的一个边界面ijm 上受有一线性分布的压力所得各节点载荷的方向和分布力的方向相同,要求各节点载荷分量还需乘上相应的方向余 弦。
由上述面力移置结果,可求出任意线性分布面的等效节点载荷。
如在 ijm 面受有线性分布面力在各点强度分别为q i , q j ,q m ,时,在i 节点的等效载荷为作用于1/4。
于ijm 面上的d 点, 二是可得d 点到ij边和im 边的距离分别为 m 至U ij及j 到im 边的距离的TTePP P c1 ,1 1Ri-0q ijm 1 -(3-62)2 4 46 j2 2q i ,0,0。
很容易看出,该力向p 点移置的等效节点力为零。
由水力学知,总压力P 1 q i ijm ,3当w i 1时,jmp 面上各点的虚位移为零,即*1W b 0,又因bc —bi ,所以有4 (3-61)1移置到每个节点上即可。
4P ,共在三个节点上的强度分别为图3-8重力移置111P (q i q j q m) jm (i,j,m) (3-63)6 2 2三、应力应变矩阵空间问题几何方程为yTz x y u v wx y zu vy xu z wyw ux zz将四面体单兀之位移表达式(3-52)、(3-54)和(3-55)代入几何方程,即得单兀应变。
用节点位移可表示为e[B]E3i B j B m B p e(3-64)式中应变矩阵子矩阵为6X 3矩阵:b i000C i01 00d i[B i] c (i,j,m,p)(3-65)6V c i b i00d i qd i0b i由上式可以看出,每一个单元的应变矩阵是一个常量矩阵;因此,采用线性位移模式的四面体单元是常应变单元。
这与平面问题中的三角形单元是一样的。
而与平面问题的不同之处仅在于应变矩阵的阶数不同。
将表达式(3-16)代入空间问题的物理方程,即可得出用单元节点位移表示的单元应力:e e[D] D[B] [S] (3-66)式中弹性矩阵[D]为应力矩阵[D]1100122(1)000000称1 22(1 )1 22(1 )[S]A1S i S j S m S p (3-67)A2b iAb[S i]E(1 ) Ab6(1 )(1 2 )V A2 GA2d iA©A©C i A©A©d i(i,j,m,p) (3-68)A2b i0A2d i A2G0A2b i[S]是常量矩阵,所以,四面体单元是显然,式(3-68)中各元素均为常量,应力矩阵常应力单元。
四、单元刚度矩阵空间问题的单元刚度由虚功方程导出。
假设该单元发生某虚位移,相应节点虚位移为e。
此时相应的虚应变为将上式及式(3-66)代入虚功方程,有* e T e*eTe( )F ([B])[D][B] dxdydzv通过与平面问题一样的处理,并注意到矩阵 [B]中的元素为常量,可以得到F e [B]T [D][B]dxdydz e [B]T [D][B]eV [K]e e (3-69)v式中,[K]e 为单元刚度矩阵:[K]e [B]T [D][B]dxdydz [B]T [D][B]V(3-70)e将式(3-64)和(3-68)式代入,可以得出其中,[K rs ]e 为3X 3阶方阵:b r b s A 2(GC s d r d s )有了单元节点力和节点位移之间的关系之后,通过分析每个节点的平衡条件可得到这个矩阵形式的方程实际上代表了关于 r 节点三个坐标轴方向的力平衡方程式。
将关于结构物所有节点的线性方程式集合起来,可以得到[B]K H K i. ijK.K-II [K]eJ 1K miJJK mjK pi K pjK im K ipK jm ©Kmm Kmp(3-71)KpmK ppAb 「C s AWs Ab r d s A z d r b s :s A 2(b r b s d r d s ) AC r d s A z d r C sAdi s AC r d s d r d s A 2(bR s C r C s )[K ]eE(1)AC r b s Ad r b sAbrC s AbArs36(1 )(1 )V[K rs ]e se s i,j ,m, pR re(r,s=i,j,m,p) (3-72)[K]式中代表整个结构的节点的位移,是所求之基本未知量;R 代表整个结构的节点载荷;[ K ]为整体刚度矩阵,其是由每个单元刚度矩阵升阶后组集得到,即NEe[K] [K]ee1其为3NP阶方阵。