第二章1自由度分析及系统分解共38页
合集下载
第二章自由度及机构运动简图ppt课件
如多个行星轮。
编辑版pppt
33
6.两构件构成高副,两处接触,且法线重合。 如等宽凸轮
注意: 法线不重合时,变
成实际约束!
n2
n1
A n1
A’ n2
编辑版pppt
W
n1
n2
A
A’
n1
n2
34
注意:各种出现虚约束的场合都是有条件的 ! 虚约束的作用: ①改善构件的受力情况,如多个行星轮。
②增加机构的刚度,如轴与轴承、机床导轨。 ③使机构运动顺利,避免运动不确定,如车轮。
编辑版pppt
30
⑦已知:AB=CD= B EF, 且AB ∥ CD 1 ∥ EF,试计算图示
平行四边形 机构的 A
自由度。
2C D3 F
E 4
虚约束
解: 重新计算:n=3, PL=4, PH=0
F=3n - 2PL - PH =3×3 -2×4 =1 特别注意:此例存在虚约束的几何条件是:
AB 、CD、EF三杆平行且相等。
机动示意图——定性地表示机构的组成及运动原理 而不严格按比例绘制的机构运动简图。
编辑版pppt
13
常用机构运动简图符号
在 机 架 上 的 电 机
齿 轮 齿 条 传 动
圆
带
锥
传
齿
动
轮
传
动
编辑版pppt
14
链
圆柱
传
蜗杆
动
蜗轮
传动
外啮 合圆 柱齿 轮传 动
凸 轮 传 动
编辑版pppt
15
内啮
棘பைடு நூலகம்
合圆
轮
编辑版pppt
20
经运动副相联后,构件自由度的变化:
机械原理自由度课件(1)

高副:点或线接触的运动副。接触面压强(yāqiáng)较高,易
磨损。 常见(chánɡ jiàn)低幅
常见高副
第六页,共61页。
(2)按相对运动形式分平面(píngmiàn)副和空间副
平面 (píngmiàn)副
空间(kōngjiān) 副
第七页,共61页。
运动(yùndòng)链
• 由两个或两个以上构件通过运动(yùndòng) 副联接而构成的系统。分两类:闭式和开 式。
第四十七页,共61页。
(2)非圆形曲线(qūxiàn)
由于曲线各处曲率中心的位置不同,故在机构运动中随着接 触点的改变(gǎibiàn),曲率中心OO1相对于构件1、2的位置及 OO1间的距离也会随之改变(gǎibiàn)。因此对于一般的高副机 构,在不同的位置有不同的瞬时替代机构。实例
如果(rúguǒ)是一对齿轮,如何替
第十七页,共61页。
第十八页,共61页。
第十九页,共61页。
第二十页,共61页。
第二十一页,共61页。
第二十二页,共61页。
第二十三页,共61页。
第二十四页,共61页。
其他零部件的表示(biǎoshì)方法可参看GB4460— 84“机构运动简图符号”。
第二十五页,共61页。
• 绘制小型(xiǎoxíng)压力机机构运动简图
拆成4个二级杆组
第五十七页,共61页。
实例(shílì)2
第五十八页,共61页。
机构(jīgòu)的级别:
第五十九页,共61页。
第六十页,共61页。
第六十一页,共61页。
F 3n 2PL PH
第三十一页,共61页。
1.3.2 机构具有确定相对运动(xiānɡ duì yùn dònɡ)的条件
机构自由度计算PPT课件

❖ 良好习惯:各种运动副和构件用规定符号表达
❖误
区:构件外形
.
5 例题:内燃机
.
例题:破碎机
.
A B
E
DC
F
G
例题:
3
C23 4
2
B 12
1
A14
.
C234
3
2
4
B12
1
4
A14
五、平面机构的自由度
1 平面机构自由度的计算 2 机构具有确定运动的条件 3 几种特殊结构的处理
复合铰链 局部自由度 虚约束
(1)复合铰链
(2)局部自由度
(3)虚约束
.
Hale Waihona Puke 导路重合的44虚约束对称结构的虚约束
机构中的虚约束
轴线重合的虚约束
.
45
习题1:计算自由度
复合铰链
复合铰链
虚约束 局部自由度 大筛结构
2
.
差动轮系
46
习题1:计算机构的自由度
凸轮拨杆机构
椭圆规机构
.
47
压缩机机构
习题1:计算机构的自由度
锯木机机构
.
❖ 转动副 ❖ 移动副
❖ 高副(齿轮副、
2
凸轮副)
.
4 运动简图的绘制方法
❖ 步骤:
确定构件数目及原动件、输出构件
各构件间构成何种运动副?(注意微动部分)
选定比例尺、投影面,确定原动件某一位置,按规定
符号绘制运动简图
标明机架、原动件和作图比例尺
❖ 绘制路线:原动件中间传动件 输出构件
❖ 观察重点:各构件间构成的运动副类型
开链
.
原动件 1
第二章单自由度系统自由振动)
二、单自由度系统的自由振动 1、无阻尼系统的自由振动 2、有阻尼系统的自由振动
三、单自由度系统在简谐激励作用下的受迫振动 1、简谐激励下的受迫振动响应及频谱分析 2、受迫振动的复数求解法--单位谐函数法 3、支座简谐激励(位移激励)引起的振动与被动隔振 4、偏心质量(力激励)引起的振动与主动隔振 5、测振传感器的原理
正弦型激励 周期激励 任意激励
k
kx m x
m
F(t)
mx kx F0 sin t
p2 k m
x p2x F0 sin t
第一章 概论
一、振动及其研究的问题 1、振动 2、振动研究的问题 振动隔离 在线控制 工具开发 动态性能分析 模态分析
第一章 概论
二、振动分类及研究振动的一般方法 1、振动分类:振动分析、振动环境预测、系统识别 2、研究振动的一般方法 (1)理论分析方法
建立系统的力学模型、建立运动方程、求解方程得到响应 (2)实验研究方法 (3)理论与实验相结合的方法
②旋转矢量表示法
③复数表示法
z Acos(t ) iAsin(t )
z Aei(t )
eit cost i sin t eit cost i sin t
x Im( Aei(t) ) Asin(t )
x
iAei(t )
振幅
A
x02
x0 p
2
初相位
arctan px0
x0
固有圆频率 p k m
(rad/s)
固有频率 f p 1 k
2 2 m
(HZ)
固有周期 T 1 2 m (s)
f
k
例题2.7 某仪器中一元件为等截面悬臂梁,梁的质 量可忽略。在梁的自由端由磁铁吸住两个集中质量 m1、m2。梁在静止时,断电使m2突然释放,求随 后m1的振动。
三、单自由度系统在简谐激励作用下的受迫振动 1、简谐激励下的受迫振动响应及频谱分析 2、受迫振动的复数求解法--单位谐函数法 3、支座简谐激励(位移激励)引起的振动与被动隔振 4、偏心质量(力激励)引起的振动与主动隔振 5、测振传感器的原理
正弦型激励 周期激励 任意激励
k
kx m x
m
F(t)
mx kx F0 sin t
p2 k m
x p2x F0 sin t
第一章 概论
一、振动及其研究的问题 1、振动 2、振动研究的问题 振动隔离 在线控制 工具开发 动态性能分析 模态分析
第一章 概论
二、振动分类及研究振动的一般方法 1、振动分类:振动分析、振动环境预测、系统识别 2、研究振动的一般方法 (1)理论分析方法
建立系统的力学模型、建立运动方程、求解方程得到响应 (2)实验研究方法 (3)理论与实验相结合的方法
②旋转矢量表示法
③复数表示法
z Acos(t ) iAsin(t )
z Aei(t )
eit cost i sin t eit cost i sin t
x Im( Aei(t) ) Asin(t )
x
iAei(t )
振幅
A
x02
x0 p
2
初相位
arctan px0
x0
固有圆频率 p k m
(rad/s)
固有频率 f p 1 k
2 2 m
(HZ)
固有周期 T 1 2 m (s)
f
k
例题2.7 某仪器中一元件为等截面悬臂梁,梁的质 量可忽略。在梁的自由端由磁铁吸住两个集中质量 m1、m2。梁在静止时,断电使m2突然释放,求随 后m1的振动。
2-自由度和结构分析
开链:指运动链的各构件未构成 首尾封闭的系统。 按照各构件间的相对运动可分 为平面运动链和空间运动链: 平面运动链:各构件间的相对运动 为平面运动的运动链。
空间运动链:各构件间的相对运动 为空间运动的运动链。
5. 自由度(Degree of Freedom)——构件所具有的独立运动个数 。
空间自由构件:
——6个
移动:X、Y、Z;转动:X、Y、Z
平面自由构件: ——3个
例:在XOY平面,移动X、Y;转动Z
6. 约束(Constrain)—对自由度的限制个数 。 自由度和约束之和应为6。 运动副为活动联接,所以引入的 约束数目最多为5个,而剩下的自 由度最少为1个。
构件1相对构件2在空间有6个 独立的相对运动,因此构件1 相对2有6个自由度。
学习网址: /jxyl/cha pter02/inside_02_m.htm
第二章
平面机构的结构分析
本章重点
运动副和运动链的概念;
机构运动简图的绘制; 机构具有确定运动的条件; 机构自由度的计算。
本章难点
机构自由度计算中有关虚约束的识别及处理。
第二章
平面机构的结构分析
本章基本要求 1. 了解机构的组成,搞清 运动副、运动链、自由 度等概念; 2. 能绘制常用机构的机构 运动简图; 3. 能计算平面机构的自由 度; 4. 对平面机构组成的基本 原理有所了解。
本章教学内容
机构的组成
机构运动简图的绘制
机构自由度的计算及注 意事项 机构的组成原理及结构 分析
自由度1~5;约束1~5。
二、运动副的分类
1. 按运动副接触形式分
运 动 副
低副 ——两构件通过面接触而构成的运动副。 高副 ——两构件通过点或线接触而构成的运动副。
空间运动链:各构件间的相对运动 为空间运动的运动链。
5. 自由度(Degree of Freedom)——构件所具有的独立运动个数 。
空间自由构件:
——6个
移动:X、Y、Z;转动:X、Y、Z
平面自由构件: ——3个
例:在XOY平面,移动X、Y;转动Z
6. 约束(Constrain)—对自由度的限制个数 。 自由度和约束之和应为6。 运动副为活动联接,所以引入的 约束数目最多为5个,而剩下的自 由度最少为1个。
构件1相对构件2在空间有6个 独立的相对运动,因此构件1 相对2有6个自由度。
学习网址: /jxyl/cha pter02/inside_02_m.htm
第二章
平面机构的结构分析
本章重点
运动副和运动链的概念;
机构运动简图的绘制; 机构具有确定运动的条件; 机构自由度的计算。
本章难点
机构自由度计算中有关虚约束的识别及处理。
第二章
平面机构的结构分析
本章基本要求 1. 了解机构的组成,搞清 运动副、运动链、自由 度等概念; 2. 能绘制常用机构的机构 运动简图; 3. 能计算平面机构的自由 度; 4. 对平面机构组成的基本 原理有所了解。
本章教学内容
机构的组成
机构运动简图的绘制
机构自由度的计算及注 意事项 机构的组成原理及结构 分析
自由度1~5;约束1~5。
二、运动副的分类
1. 按运动副接触形式分
运 动 副
低副 ——两构件通过面接触而构成的运动副。 高副 ——两构件通过点或线接触而构成的运动副。
机械原理第二章 自由度

为了改善构件的受力情况; 增加机构的刚度; 保证机械通过某些特殊位置。
(2)虚约束对机构运动的影响 虚约束是存在于某些特定几何条件下的,但这些条件不满足 时,它就将成为实际有效的约束,从而影响到机构的性能。
例如平行四边形机构, 若误差较小,则机构装配困难, 应力将增大,运动不灵活; 若误差较大,则机构无法装配,若 勉强装配,则传动效率低,易损坏。
复合铰链
F=3n-2PL - PH
= 3×2-2×2 -1 =1
(三)虚约束 虚约束是指机构中某些运动副或运动副与构件的组合带入的 对机构运动起重复约束作用的约束。计算自由度时,应去掉。 虚约束出现在下列情况中: 1. 轨迹重合 在机构中,如果用转动副或移动副连接的是两个构件上运动轨迹 相重合的点,该连接将带入1个虚约束。 例1 平行四边形机构 构件3 和构件2上的F点轨迹重合,因此 构件3和两个转动副E、F 引入一个虚约 束。 例2 椭圆仪机构 图中,∠CAD=90°,BC=BD=BA。 构件2 和构件3上的C点轨迹重合 ,引入一个虚约束。
【例2-6】 (1)计算机构的自由度;(2)用低副代替其中的高副; (3)当凸轮为原动件时画出机构所含的杆组,并说明机构的级别; (4)若选择J处的滑块为原动件,试对该机构进行结构分析。
凸轮为原动件
Ⅲ级机构
滑块为原动件
II级机构
机构结构分析举例
B 2 1 A 8 III级组
C
3
E 4
F 5 H
J
10 C
11
8 ,9 3 7 D B 18 4 A 1
局部自由度 滚子3、8绕 自身轴线的 转动 虚约束 FI杆
C 3
B B
F 3n 2 PL PH 3 6 2 7 3 1
机械原理(第二章自由度培训课件
2 齿轮比
不同大小齿轮之间的速度和力的比值。
3 设计与分析
理论计算齿轮参数、齿轮传动效率等。
齿轮齿形
齿形几何
齿轮齿形的几何形状和参数。
齿形接触
齿轮齿形接触的面积和位置。
齿形磨损
由于摩擦和磨损引起的齿形变化。
齿轮传动比的计算
1
应用Байду номын сангаас
2
用于调整驱动装置和被驱动装置之间的
速度比。
3
计算公式
根据齿轮数和齿轮直径计算传动比。
物体接触点的几何形状和边界
接触力
两个接触物体之间传递的力
接触表面
物体表面的材料和特性
齿轮与蜗轮传动
1
齿轮传动
通过齿轮将动力传递给另一个齿轮。
蜗轮传动
2
将动力传递给蜗轮以实现转速转向的改
变。
3
应用
齿轮传动广泛应用于各种机械系统中, 如汽车变速器、工厂机械等。
齿轮基础理论
1 齿轮类型
直齿轮、斜齿轮、渐开线齿轮等。
位移
物体的位置发生变化。
速度
描述物体在单位时间内位移的变 化。
加速度
描述速度在单位时间内的变化。
二次运动学
1 定义
描述物体的运动状态和变化规律,如速度和加速度的变化。
2 应用
用于分析和设计各种机械系统,如机械臂、转子等。
运动定理
1
牛顿第一定律
静止的物体保持静止,运动的物体保持
牛顿第二定律
2
匀速直线运动。
物体受力时,加速度与力的大小成正比,
与物体质量成反比。
3
牛顿第三定律
相互作用的两个物体之间的作用力大小 相等,方向相反。
自由度ppt课件
多余约束:在体系上加上或撤除某一约束并不改变 原体系的自由度数,则该约束就是多余约束。
分清必要约束和非必要约束
刚结点-3个约束
;.
2
瞬变体系
C
A
B
A
B
C’
三
0 0'
铰 共
P
线
N1
N2
N3
;.
3
平面体系的自由度 平面刚片体系的自由度
单铰:连接两个刚片的铰结点。
复铰:连接两个以上刚片的铰结点。 相当于(n-1)个单铰。
;.
5
两刚片以一铰及不通过该铰的一个链杆相联, 构成无多余约束的几何不变体系.
常变体系
瞬变体系
两刚片以不相互平行,也不相交于一点的三个 链杆相连,构成无多余约束的几何不变体系.
;.
6
刚片本身不 应包含多余约束
判断自由度
;.
7
;.
8
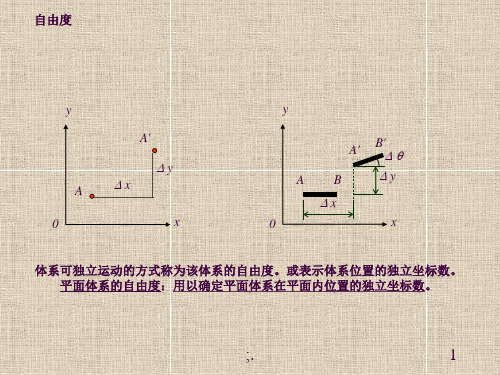
自由度
y
A 0
A' Dy
Dx
x
y
A'
B' D
AB
DyLeabharlann Dx0x体系可独立运动的方式称为该体系的自由度。或表示体系位置的独立坐标数。 平面体系的自由度:用以确定平面体系在平面内位置的独立坐标数。
;.
1
约束 如果体系有了自由度,必须消除,消除的办法是增加约束。约束有三种:
A
C
B
链杆-1个约束
单铰-2个约束
先考虑内部(不考虑支座),杆7个,21个自由度,约束2+2+2+2+2+4+4=18,支 座处三个,共21个,静定
;.
4
W=结点数x2 -杆件数-支承链杆数 W=刚片数x3-单铰数x2-支承链杆数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
统计模型
数学模型也可以根据实验装置、中型或大型 工业装置的实测数据,通过数据回归分析得 到纯经验的数学关系式,这就是统计模型。
Nu=0.023Re0.8Pr0.3
统计模型与过程机理无关,是根据实验从输 入和输出变量之间的关系,经分析整理得到。 它只是在实验范围内有效,不具有外推性。
混合模型
对实际过程进行抽象概括和合理简化,然 后对简化的物理模型加以数学概述,这样 得到数学关系式称为混合型模型,它是半 经验半理论化性质的。
F3,T3,P3
(3)闪蒸器
• 闪蒸器的加热量Q必须作为设备参数。故总变 量数为3(C+2)+1,表示闪蒸器变量间关系的 方程为:
• 物料衡算方程 x1i * F1= x2i * F2 + x3i *F3
(i=1,2,….,C)
• 热量衡算方程 • 温度平衡方程 • 压力平衡方程 • 相平衡方程
F1 * H1+F2 * H2=F3 * H3 T2=T3 P2=P3 x2i= ki * x3i (i=1,2,….,C)
独立方程数 2C+4
当一个流股分成S个流股,指定输入流股变量C+2 个以及S-1个分割分率值,则可由S(C+2)个独立 方程式解出S个分支流股包含的变量。这样该 分割器的自由度为
d=(S+1)(C+2)+(S-1)-S(C+2)= (C+2)+(S-1)
(3)闪蒸器
F2,T2,P2
F1,T1,P1 Q
自由度分析的主要目的:在系统求解之前,确定 需要给定多少个变量,可以使系统有唯一确定 的解。
F(X)=0
单元操作过程的数学模型含有m个独立方程,其 中含有n个变量,且n>m,则该模型具有的自由 度为
d=n-m
即需要在n个变量中,给定d个变量的值,其余的 m个变量可通过m个方程求解。
为了求解单元数学模型而确定的d维独立变量称为决策变 量。
独立方程数 C+2
混合器的独立方程数 m = C+ 2 混合器的自由度 d = n – m =3(C+2)-(C+2)= 2(C+2)
如果有S股输入物流,则自由度为S(C+2),即相 当于S个输入流股变量后,混合器出口流股的 变量也就确定。
(2)分割器
由直观分析可知,当指定一股输入物流的变量(C+2) 以及一个分割率(其值在0~1之间),则该分割 器的两股输出物流的变量就完全确定了,即该简 单分割器的自由度为(C+2)+1。
量向量,F=(f1,f2,……,fm)为函数关系向量。
机理模型
由过程机理出发,经推导得到,并得到实验验 证。一般只有对过程内在规律明确且相对比较简 单的研究对象才能建立机理模型。
例如:流体在圆管中作层流流动时其压力p变 化的关系式:
p2-p1=32 l u / d2 机理模型是对实际过程直接的数学描述,是过 程本质的反映,因此其结果可以外推。
• 在“物理化学”中,相律用下式表达体系的自由度
d=C-P +2
式中 C——组分数 P——想数目
“相律”中的自由度只涉及强度性质(T,P等)而不 涉及系统的大小数量。
在化工单元操作模型中,必须考虑系统的大小量、如 流股的质量流率、热负荷及压力变化等。
• 在“化工热力学”中,杜赫姆(Duhem)定理指出,对于 一个已知每个组分初始质量的封闭体系,其平衡状态取决 于两个独立变量,而不论体系中有多少个相、多少个组分 或多少个化学反应。
• 根据该定理,可推知一个独立流股具有(C+2)个自由度。 • 如规定流股的中C个组分的摩尔流量以及流股的温度T和压
力P,则该流股就确定了。
注意:杜赫姆定理定义自由度时含有归一方程∑xi=1. 所以不含归一方程,则独立流股的自由度为C+3
2.2单元模型的自由度分析
单元模型方程的分类 ➢ 物料衡算方程——指直接表达物料守恒关系式
• 共有2C+3个独立方程 • 故自由度为d= 3(C+2)+1 –(2C+3) = (C +2)+2
规定闪蒸压力,闪蒸温度,气化量,气化率等
(4)换热器
F4,T4 F1,T1
F3,T3 Q
F2,T2
(4)换热器
换热器的热负荷可作为设备参数由设计规定。对 换热器的热流一侧和冷流一侧可各写C+2个关 系方程式。故自由度为
在m个变量中究竟选取哪d个,具有一定的“自由度”。
d个变量选择原则: 1)选那些受限制较多的变量.如冷却水的温度、流量等,
它们受当地气候和水资源条件的限制。又如高温状态 下物料的温度将受设备材料耐温性能的限制。 2)选出的变量,赋值后,可是系统模型方程的求解,最 为方便、容易。
注意
• 本节所讲的自由度概念与“物理化学”课程中提到 的自由度不同。
对该过程可以建立以下独立方程:
• 压力平衡方程 • 物料衡算方程
P3= min(P1,P2) F3= F1 + F2
x 1 jF 1 x 2 jF 2 x 3 jF 3 (j 1 ,2 ,, .C .- 1 .)
• 热量衡算方程 F1H1+F2H2=F3H3
式中H——流股的比摩尔焓 F——流股的摩尔流量 x——流股中组分的摩尔分率 p——压力
F2 F1 C+2
r
F3
• 独立变量数3(C+2)+1, 过程参数(分流比U) 1个 • 2个温度等式 T1=T2, T1=T3 • 2个压力等式 P1=P2, P2=P3 • 2个物料平衡方程 F2= U*F1, F3=(1-U)*F1 • 组份等式
x1i=x2i (i=1,2,…,C-1) x1i=x3i (i=1,2,…,C-1)
主要内容
2.1 单元模型的自由度分析 2.2 化工单元模型和模块 2.3 过程系统的结构分析
2.1 自由度分析
化工单元的数学模型是单元的输入变量、输出 变量和过程参数用某种机理的、半机理的或统 计的函数关系关联而成的线性的或非线性的方 程组。
F(X)=0 其中X=(x1,x2,……xn)T为完整描述对象所需的变
的方程 ➢ 热量衡算方程——指直接表达能量守恒关系即
热力学第一定律 ➢ 设备约束方程——物料通过特定设备时受具体
设备的约束,按照特定的关系发生变化。 ➢ 其他——如混合物中各组分摩尔分率之和必须
等于1的关系(摩尔分率约束方程)等。
(1)混合器
图中有2个流股合并成1个流股,每个流股有 C+2个独立变量,因此总的变量数有3(C+2) 个。