滞后校正滞后-超前校正
串联滞后超前校正
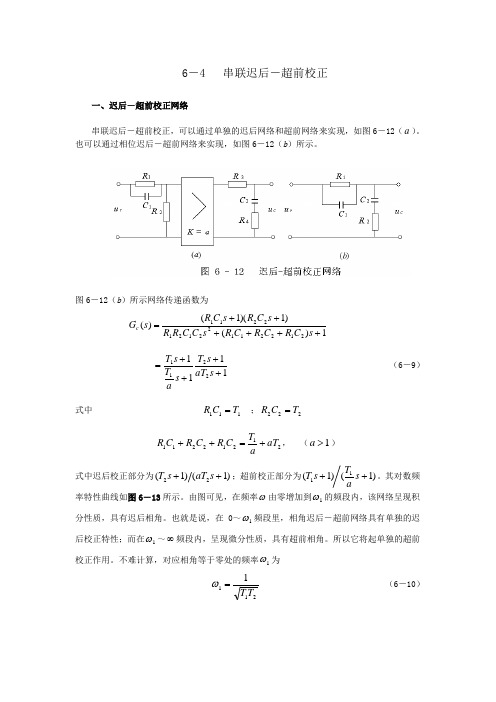
6-4 串联迟后-超前校正一、迟后-超前校正网络串联迟后-超前校正,可以通过单独的迟后网络和超前网络来实现,如图6-12(a )。
也可以通过相位迟后-超前网络来实现,如图6-12(b )所示。
图6-12(b )所示网络传递函数为1)()1)(1()(212211*********++++++=s C R C R C R s C C R R s C R s C R s G c 11112211++++=s aT s T s a T s T (6-9) 式中 111T C R = ;222T C R =21212211aT aT C R C R C R +=++, (1>a ) 式中迟后校正部分为)1()1(22++s aT s T ;超前校正部分为)1()1(11++s aT s T 。
其对数频率特性曲线如图6-13所示。
由图可见,在频率ω由零增加到1ω的频段内,该网络呈现积分性质,具有迟后相角。
也就是说,在0~1ω频段里,相角迟后-超前网络具有单独的迟后校正特性;而在1ω~∞频段内,呈现微分性质,具有超前相角。
所以它将起单独的超前校正作用。
不难计算,对应相角等于零处的频率1ω为 2111T T =ω (6-10)二、串联迟后-超前校正应用串联迟后-超前校正设计,实际上是综合地应用串联迟后校正与串联超前校正的设计方法。
当未校正系统不稳定,且校正后系统对响应速度、相角裕量和稳态精度的要求均较高时,以采用串联迟后-超前校正为宜。
利用迟后-超前网络的超前部分来增大系统的相角裕量,同时利用迟后部分来改善系统的稳态性能或动态性能。
下面举例说明串联迟后-超前校正设计的一般步骤。
【例6-4】 设单位反馈系统,其开环传递函数为)15.0)(1()(++=s s s K s G 要求:(1)开环放大系数110-=s K ;(2)相角裕量︒=50γ;(3)幅值裕量dB h 10=;试确定串联迟后-超前校正网络的传递函数)(s G c 。
超前校正和滞后校正的使用条件

超前校正和滞后校正的使用条件超前校正和滞后校正,这听起来像是那些高深莫测的数学概念,其实不然,今天我们就来聊聊这两位“调皮的小朋友”,看看它们在生活中怎么为我们服务的。
超前校正就像那种总是提前到达的朋友,永远想着“我得早点儿准备好”,而滞后校正呢,就像那种总是慢半拍的家伙,总是说“等一下,我再想想”。
这两者在实际应用中,真的是各有千秋,缺一不可。
说到超前校正,想象一下你正在开车,前方的红灯闪烁着,哦,这时候你得赶紧减速,不能等到快到才急急忙忙踩刹车。
超前校正的意思就是让你提前预判,防止意外的发生。
比如,在生产线上,如果你能提前发现产品的缺陷,咱们就可以及时调整,避免大规模的返工,这不就是为后续省下了不少麻烦嘛!在生活中,我们常常需要这种能力,想想考试前的复习,提前准备,才能在考试时游刃有余,不至于手忙脚乱。
咱们得提提滞后校正,它可不是“慢半拍”的代名词,虽然有时候让人觉得有点儿拖拉。
它其实是一种反应机制,更多的是在事后总结经验教训。
比如说,你刚刚做完一个项目,结果发现有些地方做得不够好,这个时候你得坐下来,分析一下问题出在哪儿,然后再来个大改进。
就像在玩游戏的时候,死了再重来,慢慢积累经验,下次就能把关卡打得漂亮多了。
滞后校正让我们在失误中成长,反思之后再出发,确实是种智慧。
现在,咱们再聊聊这两个“小家伙”在实际应用中的使用条件。
超前校正需要的是清晰的信息和准确的数据。
你得知道前方会发生什么,这样才能提前做出反应。
这就像是天气预报一样,知道今天要下雨,那就提前带把伞。
反之,如果你没有准确的数据,盲目预判,那就容易犯错误,搞得自己手忙脚乱。
试想一下,开车的时候,如果前面有个大坑,你不知道,结果“咣当”一声,别提有多尴尬了。
至于滞后校正,它最适合用在那些可以慢慢调整的地方,比如说生产流程、项目管理之类的。
你得留出时间来反思,不然就是在白忙活,像个无头苍蝇,乱撞不知所措。
特别是在团队合作中,每个人都有自己的意见,慢慢来,听听大家的反馈,咱们才能一起进步。
自动控制原理--滞后超前校正与PID校正
G s 1 T1s 1 aT2s
1 T1s 1 T2s
°
其中:
E1
1,a 1且.a 1 °
C1
R1
°
R2
E2
C2
°
Phase (deg); Magnitude (dB)
To: Y(1)
Bode Diagrams
From: U(1) 0
-5
-10
-15
-20 50
0
-50
ቤተ መጻሕፍቲ ባይዱ
10-4
10-3
10-2
应 50o 处的g 0.082 rad s,相应幅频特性为Lg 45.5db
据此,由20log KP Lg 45db 求得:KP 0.0053 。
为减少对相角裕量校正效果影响,PI控制器转折 频率 1 KI KP 选择远离g 处,取1 g 10 0.0082 rad s 求得:KI 0.000044 。于是,PI控制器传递函数
• PID调节器是一种有源校正网络,它获得了 广泛的应用,其整定方法要有所了解。
系统校正的设计方法
分析法
综合法
分析法:
选择一种校正装置
设计装置的参数
校验
综合法: 设计希望特性曲线 校验
确定校正装置的参数
期望特性综合设计方法:
1、先满足精度要求,并画出原系统Bode图; 2、根据Bode定理,系统有较大的相位裕量,幅频特性在剪切频
G( j)
1
j2T( jT 1)
63.5
0.707
二阶最佳指标:
L() -20dB/dB
1/2T
()
p % 4.3%
180°
ts (6 ~ 8)T
1/T
串联超前校正和滞后校正的不同之处
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。
相位超前滞后的作用
相位超前和滞后在控制系统中的作用如下:
1. 超前校正:目的是改善系统的动态性能,在系统静态性能不受损的前提下,提高系统的动态性能。
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性。
一般使校正环节的最大相位超前角出现在系统新的穿越频率点。
2. 滞后校正:通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态。
它利用滞后校正环节的低通滤波特性,在不影响校正后系统低频特性的情况下,使校正后系统中高频段增益降低,从而使其穿越频率前移,达到增加系统相位裕度的目的。
3. 滞后-超前校正:是滞后校正与超前校正的组合。
它具有超前校正的提高系统相对稳定性和响应快速性;同时又具有滞后校正的不影响原有动态性能的前提下,提高系统的开环增益,改善系统的稳定性能。
它具有低频端和高频端频率衰减的特性,故又称带通滤波器。
这种校正方式适用于对校正后系统的动态和静态性能有更多更高要求的场合。
6-2 超前-滞后校正

1
2.65
引入超前校正网络的传递函数:
1 α Ts 1 1 0.378s 1 G c (s) α Ts 1 3 0.126s 1
(4)引入 倍的放大器。为了补偿超前网络造成的衰减,引 入倍的放大器, 3 。得到超前校正装置的传递函数
1 0.378s 1 0.378s 1 α G 0 (s) 3 3 0.126s 1 0.126s 1
《自动控制原理》
—— 频率特性法(6-2)
(超前校正)
1
6.3 频率域中的无源串联超前校正 三个频段的概念
L() dB
15
c
15
低频段
中频段
高频段
2
校正方法通常有两种: 1. 分析法。实际上是一种试探的方法,可归结为: 原系统频率特性+校正装置频率特性=希望频率特性 G0(jω) + Gc(jω) = G(jω) 从原有的系统频率特性出发,根据分析和经验,选 取合适的校正装置,使校正后的系统满足性能要求。 2. 综合法。这种方法的基本可归结为: 希望频率特性原系统频率特性=校正装置频率特性 G(j) G0(j) = Gc(j) 根据系统品质指标的要求,求出满足性能的系统开 环频率特性,即希望频率特性。再将希望频率特性与 原系统频率特性相比较,确定校正装置的频率特性。
17
通过超前校正分析可知: (1)提高了控制系统的相对稳定性——使系统的稳定 裕量增加,超调量下降。 工业上常取α=10,此时校正装置可提供约550的超前 相角。为了保证系统具有300600的相角裕量,要求校 正后系统ωc处的幅频斜率应为-20dB/dec,并占有一定 的带宽。 (2) 加快了控制系统的反应速度——过渡过程时间减 小。由于串联超前校正的存在,使校正后系统的c、r 及b均变大了。带宽的增加,会使系统响应速度变快。 (3)系统的抗干扰能力下降了—— 高频段抬高了。 (4)控制系统的稳态性能是通过步骤一中选择校正后 系统的开环增益来保证的。
超前滞后校正的原理
在自动控制系统中,为了改善系统的稳定性和瞬态性能,常采用一种称为超前滞后校正的方法。
这种控制策略涉及到对系统开环传递函数的修改,以改变系统的相位和幅值特性,使得闭环系统的性能满足设计要求。
具体来说,超前校正主要用于提高系统的响应速度和稳定性,而滞后校正则用以增强系统的稳态精度和抗干扰能力。
超前校正的原理是通过在控制系统中引入一个具有相位超前特性的校正器,该校正器在中频段产生正相位shift 并增加系统的截止频率。
这导致系统响应速度变快,过渡过程时间缩短,从而提高了系统动态性能。
由于相位的提前,系统的相位裕度增大,进而提升了系统的稳定性。
然而,超前校正通常会牺牲系统的低频增益,这可能会影响其稳态精度。
滞后校正则是通过加入一个具有相位滞后特性的校正器,它在低频段提供额外的增益而在高频段减少增益,从而增强了系统的低频响应。
这样做可以减小或消除静差,提高系统的稳态准确性。
滞后校正还会降低系统的截止频率,增加相角滞后,有助于滤除高频噪声,提升系统的抗干扰性。
不过,滞后校正会减小系统的相位裕度,可能导致系统反应缓慢,过渡过程时间变长。
在实际应用中,工程师会根据系统的实际需要选择合适的校正方式。
对于需要快速响应和良好动态性能的系统,可能会倾向于使用超前校正;而对于注重稳态精度和抗干扰能力的场合,则可能优先考虑滞后校正。
有时也会将超前和滞后校正结合起来形成超前-滞后校正,以期达到更优的综合性能。
总结而言,超前滞后校正是一种在控制系统设计中常用的方法,它通过改变系统的频率响应来满足不同的性能指标。
超前校正主要改善系统的动态性能和稳定性,而滞后校正则更注重于提升稳态精度和抗干扰能力。
掌握超前滞后校正的原理和适用场合,对于自动控制系统的设计至关重要。
滞后校正、滞后超前校正以及PID简介
• 适当调整增益系统,可以提高系统 的快速性, 同时还可降低稳态误差。
• 适当调整微分以及积分常数可以提高系统的平稳 性,以及稳态精度。
c (c ) arctg[0.1(b 1)],约5~12
例:设控制系统如图所示。若要求校正后系统的静态速度 误差系数等于30s1,相角裕度不低于40。,幅值裕度不小 于10dB,幅穿频率不小于2.3rad/ s,试设计串联校正装置。
R(s) -
Gc (s)
K s(0.1s 1)(0.2s 1)
0.024
0.27
2.7 5
12
负面影响:
由于ωc的下降使得系统快速性受到一定的限制。
滞后校正装置的滞后相角特性对系统不利。 一般地:
为了减小校正装置的滞后相角对 ωc附近开环相频特性 的影响,应将校正装置的两个转角频率配置在远离ωc的 低频段。
第三讲
6.3.4串联滞后超前校正的综合
s zi
1 T
传递函数:Gc(s)
1 bTs ,其中,b 1 Ts
R2 R1 R2
1,
T (R1 R2)C,b为表示滞后程度的分度系数。
L()
1
1
T m bT
0
20dB / dec 20lg b 10lg b
()
1
1
0
T m bT
m -90。
•串联校正中,利用滞后校正装置中高频衰减特 性;
(4)确定滞后校正装置参数T
一般滞后校正装置的T与校正后截止频率满足: 1 ωc bT 5 ~ 10
这里取10,可得T 41s。
说明相位超前和相位滞后校正的各自特点
说明相位超前和相位滞后校正的各自特点
相位超前和相位滞后校正是相位校正技术中常用的两种方法,它们各有其特点。
相位超前是一种电力系统调度中常用的方法,其目的在于改善相位不平衡的紊
乱状态。
它的主要思想是通过改变某一节点的电压相位,使得系统设备各自的相位组合恢复到正确的相位平衡状态。
它的特点是,它只能用于调节相位不平衡的节点,而不能用于调节全局的相位不平衡问题。
另一种常用的相位校正方法是相位滞后校正法,它也称为纵向相位调整,它将
节点之间的电压相位关系作为一个阶段。
它的特点是,它可以用于调节全局的电压相位不平衡,也可以用于调节相位不平衡的节点。
它的优点是,它不仅可以提高系统的发电能力,而且可以改善系统的负荷调度效率。
总之,相位超前和相位滞后校正是相位校正技术中重要的两种方法,它们各有
其特点和优势。
它们的正确使用和操作可以改善系统的负荷调度能力和发电能力,从而提高系统的运行稳定性和安全性,保证用电安全。
线性系统,超前、滞后校正
L' ' (c ' ' ) 20lg L' (c ' ' ) 0
1 0.1c ' ' T
5)验证已校正系统的相角裕度和幅值裕度是否满足要求。
例
单位负反馈系统的开环传递函数为:
K G0 ( s) s(0.1s 1)(0.2s 1)
设计指标: (1)校正后系统的静态速度误差系数Kv=30 ; (2)开环系统截止频率 c ≥2.3rad/s ; (3)相位裕量γ"≥40°; (4)幅值裕量h"≥10dB ; 试设计串联校正装置。
串联滞后校正
利用滞后网络的高频幅值衰减特性使截止频率降低, 从而使系统获得较大的相位裕量,同时保持低频段 的开环增益不受影响。
Gc ( s )
与超前校正比较
Ts 1
Ts 1
滞后校正既能提高系统的稳态性能,有基本上不改变系 统的动态性能,采用超前校正的系统带宽大于滞后校正 的,带宽越大,抗干扰能力越差。 不过如果采用超前-滞后校正,则更完美。
自由响应:动态电路的完全响应中,已由初条确定待定系数k 的微分方程通解部分,称为电路系统的自由响应, 它的函数形式是由电路系统本身结构决定的,与外加激励无关。 强迫响应:动态电路微分方程的特解形式,仅仅由激励决定, 称为强迫响应;
1)零极点和传递函数对系统性能的影响 2)串联超前校正与串联滞后校正
当零极点相重合,产生零极点对消时,相应的模态也消失
串联超前校正与串联滞后校正
串联超前校正
1)改善系统的动态性能,实现在系统静态性能不受 损的前提下,提高系统的动态性能。 2)通过加入超前校正环节,利用其相位超前特性来 增大系统的相位裕度,改变系统的开环频率特性。 3)一般使校正环节的最大相位超前角出现在系统新 的穿越频率点。 其传递函数为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
总结 为了使系统满足一定的稳态和动态要求,对开环对数幅
频特性的形状有如下要求: 1)低频段要有一定的高度和斜率; 2)中频段的斜率最好为–20dB/dec,且有足够的宽度; 3)高频段采用迅速衰减的特性,抑制不必要的高频干
扰。
10
三、校正方式 1. 串联校正
校正装置串联在系统的前向通道中,一般接在测量点之 后放大器之前,如图a所示。
1 (T )2
Lc() 20lg (aT )2 1 20lg (T)2 1
c ( )
arctan
aT
arctanT
arctan
(a 1
1)T a(T )2
>0
相频曲线具有正相角,即网络在正弦信号作用 下的稳态输出在相位上超前于输入,故称为超前校 正网络。
静态位置误差系数Kp 静态速度误差系数Kv 静态加速度误差系数Ka 稳态误差ess
(2) 动态指标: 上升时间tr 峰值时间tp 调整时间ts 最大超调量σ% 振荡次数N
4
2. 频域性能指标
(1) 开环频域指标 开环截止频率ω c (rad/s) ; 相角裕量γ(°) ; 幅值裕量h 。
(2) 闭环频域指标 谐振频率ω r ; 谐振峰值 Mr ; 带宽频率ωb与闭环带宽0~ωb : 一般规定L(ω)由20lgA(0)下降到-3dB时的频率,亦
16
ωm: 是ω1=1/aT和ω2= 1/T的几何中 心,也是最大超前角发生处。
ωm
1和2的几何中心为:
1 (lg
1
lg 1 )
2 aT T
1 lg
Ta
lg m
ωm
令 dc() 0 d
m
1
Ta
最大超前相角
:
m
发生在
m
T
1 a
m
arctan
a1 2a
Gc(s):校正装置。可以设计成超前、滞后、滞后-超前的形式。 可以用无源校正装置或有源校正装置。
11
2.反馈校正(又称“并联校正”)
校正装置串联在系统的前向通道与某个环节组成的局 部反馈回路之中,如图b所示。
可以削弱系统非线性特性的影响,提高响应速度,降 低对参数变化的敏感性及抑制噪声的影响。
3. 前馈校正
(也可以利用斜率的定义来求)
Lc(m ) 20 lg Gc ( jm ) 10 lg a (mT 1 a )
ωm
超前校正装置实质是一个高通滤波器。
Lc′(ωm )、m 是确定超前网络参数的主要依据。
18
4、超前校正装置的特点
按校正装置在系统中的连接方式不同,系统校正
分为串联校正、反馈校正、前馈校正和复合校正。 根据校正装置的特性,可分为超前校正、滞后校
正、滞后-超前校正。 校正的实质表现为修改描述系统运动规律的数学
模型。 设计方法:时域法、频率法。
3
§6-1 系统校正的设计基础
一、系统的性能指标
1. 时域性能指标
(1) 稳态指标:
前馈校正又称为顺馈校正,是在系统反馈回路之外 采用的校正方式之一,包括对输入信号进行补偿(如图c 所示)和对干扰信号进行补偿两种形式。
12
4. 复合校正
在反馈控制回路中加入前馈校正通路,分为按输入补 偿和按干扰补偿两种形式。
13
§6-2 校正装置及其特性 ★
一、超前校正装置
a a
1 1
处,将ωm带入 c '( )。
a 1 sinm 1 sinm
j m µ a, 实际选用的a≤20,单级超前网络最大正相角
m
60
17
对数幅频特性 Lc′(ωm )
Lc
(2
)
20
lg
Gc
(
j
1 T
)
20lg a
20lga 10lga
Gc'
(s)
aGc
(
s)
1 aTs 1 Ts
a s 1 aT ,(a 1) s1 T
2、超前校正的零、极点分布
zc
1 aT
1 pc = - T
15
3、超前校正装置的频率特性
Gc (
j
)
1 1
jaT jT
1 (a
2
T ) e j(arc tan aT arctanT )
第六章 线性系统的校正方法
6-1 系统校正的设计基础 6-2 常用的校正装置及其特性
1
原理方框图
r 给定值 -
e 偏差
执行机构
测量信号 测量装置
n 扰动 被控对象
c 被控量
2
为改善系统的动态性能和稳态性能,常在系统中
附加一些其参数可以根据需要而改变的机构或装置,
使系统整个特性发生变化,从而满足给定的各项性能 指标,这就是系统校正。
Gc (s)
U0(s) Ui (s)
R2 R1 R2
1 R1Cs 1 R2 R1 Cs
R1 R2
1 1 aTs a 1 Ts
其中:a R1 R2 (a 1),T R1R2 C
R2
R1 R2
14
超前校正网络串入一个放大倍数Kc=a的放大器后,传 递函数变为:
8
高频段
L(ω)在中频段以后的频段。 高频段的形状主要影响时域响应的起始段。 在分析时,将高频段做近似处理,即把多个小惯性环 节等效为一个小惯性环节去代替,等效小惯性环节的时间 常数等于被代替的多个小惯性环节的时间常数之和。 高频段的幅值,直接反映系统对高频干扰信号的抑制能 力。高频部分的幅值愈低,系统的抗干扰能力愈强。
7
中频段
L(ω)在开环截止频率ωc(0分贝附近)的区段。 频率特性反映闭环系统动态响应的平稳性和快速性。
时域响应的动态特性主要取决于中频段的形状。
反映中频段形状的三个参数为:开环截止频率ωc、中 频段的斜率、中频段的宽度。
为了使系统稳定,且有足够的稳定裕度,一般希望: 中频段开环对数幅频特性斜率为-20dB/dec的线段,ωc 较大,且有足够的宽度;
即A(ω)由A(0)下降到0.707A(0)时的频率叫作系统的带宽 频率。频率由0~ωb的范围称为系统的闭环带宽。
5
二、频率法校正
6
低频段
L(ω)在第一个转折频率以前的频段。 频率特性完全由积分环节和开环放大倍数决定。
低频段对数幅频特性: Ld () 20lg K 20 lg
低频段的斜率愈小,位置愈高,对应系统积分环节的 数目ν愈多、开环放大倍数K愈大。则在闭环系统稳定的条 件下,其稳态误差愈小,动态响应的跟踪精度愈高。