第四章部分自适应阵列处理技术
阵列信号处理
B
B
1 有 zB t 2
B
2
z e jt d z B t
因此
s r , t z B t e j0t e j0 s 0, t e j0
2
小结: 信号带宽足够小使得波到达 r 处时的复包络基本 不变。 T r 表示了波传播的空间信息(方向、位置), 它仅含于载波项中,而与信号复包络无关。
s exp[ j t r ]d
T
这里函数 s 是任意的,只要其Fourier变换存在即 可。该式表达了沿同一方向 传播的任意波形(信 号),其频率分量任意。
B. 波动方程球坐标系中的解
球坐标系 r , , ,但是,当波动方程的解具有球形 对称时,函数s r , , , t 并不依赖于 和 ,使解简化, 这时波动方程可简化为:
T
波动方程的任意解可以分解为无穷多个“单频” 解的迭加(传播方向和频率分量均任意)。
波动方程的单频解可以写成单变量的函数:
s r , t A exp[ j (t k r ) A exp[ j t r ]
T T
k ,其大小等于传播速度的倒数,其方向与 式中
时间频率 空间频率
b) 任意解:由四维Fourier变换表示: j t k r 1 s r, t s u , e d kd 4 2 j t k r s k , s t , r e d rdt 其中
T
a t 带宽越宽,信号起伏越快。窄带条件即要求a t cos 变化比 0t t 变化慢。
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
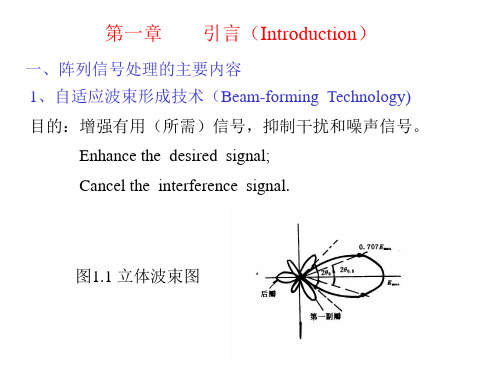
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
阵列信号处理技术
旁 瓣零 陷 。之后 , 又 提 出 了 自适 应 阵列 求 最 优 他 权 的最 大信 干噪 比 (I ) SNR 准则 。16 9 7年 Wirw do
提 出 了最小均 方 ( MS 自适应 算法 。1 6 L ) 9 9年 C . a
研制的集成 自 适应阵列信号处理技术的多功能数 字阵列 雷达 。英 国 防御 评估 研 究 局 、 门子普 莱 西
赛 防务系 统公 司 以及 罗克 马诺 尔研究 有 限公 司合 作 开 发 的 多 功 能 电 子 扫 描 自 适 应 雷 达
( SR等。 ME A )
pn提 出了最 小方 差无 失 真 响 应 ( D ) o MV R 波束 形 成器 , 通过求 解约 束最 优化 问题来 求权 。F ot rs将 单 一 的无失 真 响应 约 束 推广 为 多 个 线性 约 束 , 提 出 了线 性 约束 最 小 方 差 波束 形 成 器 ( C L MV)线 , 性 约束 由最 初 的方 向约束 推广到 导数 约束 和特征 向量 约 束 。V n en总 结 分 析 了 L MV 波 束 形 aV e C
自上世 纪 4 0年 代 起 , S A P已经 有 近 7 0年 的
向发展。这些问题 的解决也必将使 阵列处理技术 的发 展迈 向新 的 台阶 。
值 得一提 的是 , 由于外界 环境 复杂 多变 , 自 盲 适应 波束 成形 最 近 受 到许 多 学 者 的 广泛 关 注 , 并
发展历 史 , 根据 典型技 术 的提 出 ,S A P大致 可分 为
摘 要 : 阵列信 号处理 (S ) A P 由于其 广泛应 用于雷达 、 信 、 通 声学 、 生物 信 息处理 等诸 多领域 而受
到 了长期 的关注 , 至今 还是一 个研 究热 点。现 回顾 了( S ) A P 的发展 与研 究现状 , 介绍 了阵列信 号
数字阵列雷达数据处理技术

摘要
摘要
数字阵列雷达(DAR)是一种接收和发射都采用数字波束形成技术的数字 化相控阵雷达,一方面,其具有系统资源调度和波束指向控制更加灵活,易于 实现多功能和多任务;信号接收处理动态范围大,抗干扰能力强:可形成各种 特殊赋形的照射波束,以实现可控的空间功率分配;通过同时形成多个波束, 可以实现宽角空域覆盖和对多个目标的同时高数据率搜索、跟踪等特点。另一 方面,由于数字阵列雷达的信号产生和接收处理全部采用多通道并行的数字化 处理技术,其系统构成十分复杂,实时产生的海量信号数据对系统的数据吞吐 和处理能力要求极高,多功能和多任务带来的系统控制、资源调度和目标数据 处理的复杂性对数字阵列雷达数据处理系统的设计和工程实现形成巨大挑战。 本论文课题针对某数字阵列雷达的技术特点和数据处理功能需求,开展数字 阵列雷达数据处理算法、数据处理流程设计和数据处理系统工程化实现方法研 究,重点分析研究了数字阵列雷达实现多功能和多任务的数据处理流程及数据 处理系统工程实现中的关键技术,对从警戒搜索、目标确认到排序跟踪各环节 的处理算法进行了仿真分析,给出了数字阵列雷达数据处理流程的优化设计方 案。 本论文完成的主要研究工作包括: (1)数字阵列雷达数据特点及数据处理模式分析研究。分析了数字阵列雷达的 回波点迹延伸和波束调制特性,针对数字阵列雷达系统数据处理的功能需求和 数据处理流程穿插交替的特点,研究了多目标数据处理的警戒搜索任务执行过 程、目标截获确认过程和多目标跟踪任务编排调度执行过程的数据处理模式。 (2)数字阵列雷达多目标数据处理算法研究。重点讨论了目标航迹起始、点迹 数据关联和跟踪滤波三个关键环节的算法;针对点迹密集环境下现有基于 Hough变换的目标航迹自动起始算法的不足,提出了一种改进的单变量Hough 变换航迹起始方法,能够在较复杂的杂波剩余背景中较好地实现目标航迹的自
雷达系统(4)

• 数字T/R组件的收发状态是独立的,发射支路由DDS产生所需 的波形、经两次上变频形成发射信号通过环流器输出;接收支路 由环流器输入经限幅低噪声放大、两次下变频、A/D变换、I/Q 分离形成数字信号输出。DDS只对发射信号进行幅度和相位加权, 在接收状态幅相控制通过常规DBF方法完成。收发通道变频所需 的本振信号是时分复用的,有利于改善收发通道间相互干扰。
(3) 宽带数字阵雷达的延时补偿技术
孔径渡越时间的经典补偿方法是将天线分成若干子阵,子阵内采 用相位波束控制,而子阵之间采用时间延迟补偿,如图所示。
子阵之间通过时间延时控制之后,波束的偏移主要是由子阵孔 径渡越时间确定,极大减小了整个阵面对孔径渡越时间的影响。
若天线阵内每一个单元都包含有时间延时单元,使得在第N号单 元通道内的信号延迟τA,则第i号单元通道内的延迟为iτA/(N-1)。这 样,天线的孔径渡越时间TA将降为TA-τA。由信号频率变化所引起 的波束指向的偏移为:
f • tg
f0
当目标回波能量非垂直入射阵列时,阵列方向图形成时,边缘单 元需要的相位: (2 / 。)Lsin
L为阵列孔径,如果只改变频率而不改变移相器,那么波束将会 移动。对于等线长馈电而言,不会使波束变形,并且当频率增大时 ,波束会移向法线。如果由时延网络代替移相器,则通过时延网络 的相移会随频率变化,但波束保持不动(波束指向不变)。当使用移 相(独立于频率)控制波束时,若工作频率为雷达中心频率f0,波 长为λ0,若要求天线线阵的波束最大值指向为θ,则对于离阵中心 距离为x的单元,其相位为: (2x / 0 )sin (2x / c) f0 sin
4.2 数字阵列雷达的基本原理
接收和发射波束均以数字方式来实现的全数字化相控阵天线雷达 就称作数字阵列雷达。
机载雷达STAP空域降维研究
摘要I摘要杂波抑制是机载预警雷达下视工作时的关键问题。
除了采用低副瓣天线、偏置天线相位中心(DPCA)等传统杂波抑制技术,能够有效提高机载相控阵雷达地杂波抑制能力和动目标检测性能的空时二维自适应处理技术(STAP)同样受到了广泛关注。
STAP 的研究始于 1973 年,至今有 20 多年的历史。
最初提出的是使用全部空域和时域进行处理的全时空的最优算法,它的计算量和实现的复杂度令人们难以接受,并且难以获得估计协方差矩阵所需的足够的样本数。
因此为了在实际中能够应用空时二维自适应处理,就必须进行降维处理。
本文首先介绍机载雷达杂波特性和STAP基本原理,在此基础上研究了空域降维。
空域降维的研究分为两个方面,阵元域降维和波束域降维。
在第三章研究阵元域降维时,讨论了均匀子阵划分方法和非均匀子阵划分方法,并在此基础上提出了一种新的子阵划分方式。
除此而外还对三维处理进行了研究。
在第四章对波束域降维进行研究时,讨论了波束域降维原理和并对局域多波束降维方法的性能进行了仔细的研究。
关键词:空时二维自适应处理 波束域降维 阵元域降维 杂波抑制ABSTRACT IIIABSTRACTClutter suppression is critical to airborne early warning surveillance sensors. In addition to the conventional techniques such as low sidelobe antennas and displaced phased center antenna(DPCA), there has been great interest in space-time adaptive processing(STAP) because it can suppress clutter effectively and improve the detection performance of airborne phased array radar evidently. The research on STAP began in 1973 and has been performed for more than 20 years. The computation load and the implementation complexity of full rank STAP are too great to be accepted and it is really very difficult to obtain enough samples to estimate the covariance matrix. In order to use space-time adaptive processing technology in practice, we must reduce the rank.In the thesis, we describe the clutter character of airborne radars and the principles of the STAP firstly, and then we investigate the space-domain reduced-rank. The investigation of space-domain reduced-rank contains two parts, one is rank reduction within element domain and the other is rank reduction within beam domain. In the studying of rank reduction within element domain at the third chapter, we discuss the methods of subarray division by regular and irregular means and in this foundation a new method of subarray division is presented. In this chapter, a three dimensional space-time adaptive processing method is investigated as well. In the fourth chapter, we investigate rank reduction within beam domain. In this chapter we discussed the principle of rank reduction within beam domain and investigate performance of the locally multiple beam reduced-rank in detail.Keywords: space-time adaptive processing rank reduction within beam domain rank reduction within element domain Clutter Suppression目录V目录第一章 绪论 (1)1.1研究背景及其意义 (1)1.2研究历史和现状 (3)1.3本文的研究内容 (4)第二章 机载雷达的杂波特性和STAP的基本原理 (7)2.1引言 (7)2.2机载雷达的杂波谱 (7)2.3空时自适应处理和降维原理 (10)2.3.1空时自适应原理 (10)2.3.2降维原理 (11)2.4空时自适应处理中的时域降维方法 (14)2.4.1 多普勒滤波后的空时联合处理方法(mDT) (14)2.4.2 滑窗法(WARD) (15)2.4.3空时二维处理时域降维方法性能模拟 (16)2.5 小结 (22)第三章相控阵天线中的阵元域降维 (25)3.1相控阵天线子阵划分原理 (25)3.1.1子阵级STAP原理 (25)3.1.2相控阵的划分方法 (26)3.2相控阵的规则子阵划分方法 (27)3.2.1规则不重叠的子阵划分方法 (27)3.2.2规则不重叠子阵的划分准则 (28)3.2.3规则不重叠划分存在的问题 (29)3.2.4规则重叠的子阵 (34)3.3不规则子阵划分的方法 (35)3.3.1 不规则子阵划分的方向性函数 (35)3.3.2等噪声功率法 (35)3.3.3一种新的子阵划分方法 (38)3.4三维处理 (42)3.4.1三维处理的基本原理 (42)3.4.2性能模拟与仿真 (43)VI机载雷达STAP空域降维研究3.5小结 (47)第四章 波束域降维 (49)4.1波束域降维原理 (49)4.2局域多波束降维方法 (51)4.2.1局域多波束降维原理 (51)4.2.2性能模拟与仿真 (53)4.4本章小结 (57)第五章 总结与展望 (59)5.1本文工作总结 (59)5.2课题展望 (59)致 谢 (61)参考文献 (63)第一章绪论1第一章绪论1.1 研究背景及其意义机载雷达因为架设在高空载机上,对飞机一类目标,特别是低飞目标,其可视距离要比地基雷达远得多,同时还具有很强的机动灵活性,可担任警戒、指挥等重要任务,在现代战争中所起的作用越来越重要。
第四章 阵列信号处理
通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
自适应信号处理技术的应用
自适应信号处理技术的应用张瑞;杨铁军【摘要】自适应信号处理技术在雷达、通信、声纳、图像处理、计算机视觉、地震勘探、生物医学、振动工程等领域有着极其重要的应用.目前这门新学科仍在继续向纵深方向迅速发展,特别是盲自适应信号处理和利用神经网络进行的非线性自适应信号处理.对于实现智能信息处理系统有很好的应用前景.介绍了自适应信号处理技术在滤波、系统辨识、自适应均衡、回波抵消、谱估计、谱线增强、自适应波束形成等方面的应用,并介绍了其发展前景.【期刊名称】《现代电子技术》【年(卷),期】2006(029)017【总页数】3页(P7-8,11)【关键词】自适应信号处理;滤波;系统;神经网络【作者】张瑞;杨铁军【作者单位】河南工业大学,信息科学与工程学院,河南,郑州,450052;河南工业大学,信息科学与工程学院,河南,郑州,450052【正文语种】中文【中图分类】TN911.7自适应数字系统具有很强的自学习、自跟踪能力,算法简单且易实现,在噪化信号的检测增强,噪声干扰的抵消,通信系统的自适应均衡以及未知系统的自适应参数辨识等方面获得了广泛的应用。
同时,自适应技术又是智能信息处理的重要基础。
1 自适应信号处理技术的应用1.1 自适应滤波器用于滤波与逆滤波自适应数字滤波器有2个输入端,如图1所示。
图1 自适应滤波器用作滤波和逆滤波信号输入端常称为主输入端,所期望的响应d(n)输入端称之为参考输入端。
y(n)就是自适应滤波器的输出端,误差e(n)引出一个误差输入端。
主信号s(n)经过传输系统频率特性和噪声干扰的影响,信号x(n)将和主信号s(n)不同,但他蕴含着主信号,利用自适应滤波器可从信号x(n)中提取原来的主信号s(n),而噪声干扰被滤波器抑制了。
当滤波器输出y(n)逼近于参考输入d(n)=s(n)时,自适应滤波器的最佳权矢量w0可由式:H(z)·w0=1得到,即:w0=H-1(z)这表明自适应滤波器的最佳滤波响应是传输系统转移函数的倒数(即逆函数),这时自适应滤波器对主输入信号x(n)进行逆滤波,使其复原主信号。
阵列信号处理基础教程
授课教师:廖桂生
西安电子科技大学雷达信号处理实验室
课程目的
掌握空间传播波携带信号的获取与处理的基 本理论和方法,特别是空间多维信号算法,熟悉 参数估计和自适应波束形成的常用算法。
课程要求
期间:含上机实践 期末:论文、考试
西安电子科技大学雷达信号处理实验室
参考文献
1. Prabhakar S.naidu,Sensor Array Signal Processing 2. 王永良.空间谱估计理论与算法,清华大学出版社 3. Monzingo.R.and Miller T. Introduction to adaptive array.
西安电子科技大学雷达信号处理实验室
代入波动方程:k
2 x
s(r
,
t
)
若约束条件:
k
2 x
k
2 y
k
2 y
s(r,
t
)
kz2s(r
,
t
)
kz2
2
c2
2
c2
s(r,t)
即
kk
k
2 x
k
2 y
kz2
c
则:(*)式表示的信号是波动方程的解,称为“单色”
或“单频”解。
c
为传播速度,2
频率 f 之外无其它频率分量,那么该信号由其整个
持续期内的时间间隔为1/ 2 f 的信号采样值完全确
定,从而使模拟信号可以由无限个离散的点信号来 表示(拟合)。
空间采样:与时间采样类似,采样频率必须足够高才 不会引起空间模糊(即空间混叠),但由于受到实 际条件的限制,空间采样的点数不可能无限,这相 当于时域加窗,所以会出现旁瓣泄漏。
面向线性调频干扰的空频自适应处理算法
第45卷 第12期2023年12月系统工程与电子技术SystemsEngineeringandElectronicsVol.45 No.12December2023文章编号:1001 506X(2023)12 3772 09 网址:www.sys ele.com收稿日期:20220618;修回日期:20221113;网络优先出版日期:20221229。
网络优先出版地址:https:∥kns.cnki.net/kcms/detail/11.2422.TN.20221229.1840.010.html基金项目:国家科技部重点研发项目(2019YFF0217300)资助课题 通讯作者.引用格式:刘鹏,王盾,彭博.面向线性调频干扰的空频自适应处理算法[J].系统工程与电子技术,2023,45(12):3772 3780.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:LIUP,WANGD,PENGB.Space frequencyadaptiveprocessingalgorithmforLFMinterference[J].SystemsEngineeringandElectronics,2023,45(12):3772 3780.面向线性调频干扰的空频自适应处理算法刘 鹏1,2, ,王 盾1,2,彭 博1(1.北京卫星信息工程研究所,北京100095;2.天地一体化信息技术国家重点实验室,北京100095) 摘 要:针对卫星导航应用中线性调频(linearfrequencymodulated,LFM)干扰统计特征时变引起的抗干扰性能下降问题,提出了一种基于数据空时频三维特征分组的空频自适应处理(space frequencyadaptiveprocessing,SFAP)算法。
首先通过时频分析方法获取采样数据的时域、频域联合分布,并利用空间相关系数分析相同频率干扰在不同时间的空间相关性,然后对SFAP的采样数据进行分组,将不同时间具有相同频率和到达角参数的采样点分到相同组,最后利用分组后的数据进行协方差矩阵估计、权值计算和自适应滤波,提高了干扰特征值、增加了零陷深度、提升了抗干扰能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全部
部分
运算量
大
小
收敛性
慢
快
性能
潜在性能高
使用性好(与理论极限 性能相比有损失)
第四章部分自适应阵列处理技术
2
西安电子科技大学雷达信号处理实验室
关键: 如何合理设计部分自适应结构,使得性能损 失最小而运算量显著降低。
部分自适应技术的发展情况:
1. chapman,IEEE,Trans AP-24,1979,P685~696 变换降维
的性能不如变换前处理的结果(有性能损失);
特殊地,当 T 可逆时:WT,opt T1RX 1a 0
W T W T ,o p tR X 1 a0 W o p t
此时在变换域处理的结果与变换域前一样,但这 时需要 MN ,并不能降维,所以无实际意义。
➢关于变换矩阵的构造(子阵划分)问题:
2
1 23 4 529 30 31 2 33d2d
2d
1
2
15
16
第四章部分图自适3应.1阵列处理技术
8
西安电子科技大学雷达信号处理实验室
新阵列方向图
子阵方向图
图3.2
第四章部分自适应阵列处理技术
9
西安电子科技大学雷达信号处理实验室
子阵均匀划分法,来波方向为 0 0
第四章部分自适应阵列处理技术
第四章部分自适应阵列处理技术
3
西安电子科技大学雷达信号处理实验室
4. Adams, Adaptive Main-Beam Nulling for NarrowBeam Antenna Arrays.IEEE,AES-16,1980,P509~516
用几个指向目标临近方向的波束进行对消
5. VanVeenB.D,Partially Adaptive Beamformer Design Via Output Power Minimization
➢选取部分波束进行处理就称为波束域部分自 适应处理。
下面研究波束选取的方法
第四章部分自适应阵列处理技术
15
西安电子科技大学雷达信号处理实验室
1. Gabriel方法:分两步:首先估计干扰方向(粗 略)。
再选取指向干扰方向的若干波束。
2. Adams方法:在目标邻近方向选取若干波束。
以等距线阵为例(间距为 2 )。 N元阵经过butler波束形成得到N个波束。如图3.5
123
N
Butler矩阵
1 2 3
N
图3.5
第四章部分自适应阵列处理技术
16
西安电子科技大学雷达信号处理实验室
第四章部分自适应阵列处理技术
13
西安电子科技大学雷达信号处理实验室
来波方向0 30 ,干扰方向 1 第四章部分自适应阵列处理技术
0
和 2 60 14
西安电子科技大学雷达信号处理实验室
§4.3 波束空间部分自适应处理
➢波束指的是普通波束。
➢波束空间自适应处理:最常见的是对傅氏基 波束进行处理。
第四章 部分自适应阵列处理技术
§4.1部分自适应概念
全自适应: 对全部单元作自适应控制(使 用了全部可利用的系统自由度 degree of freedom).
部分自适应:对其中部分单元作自适应控制 (只使用了部分可利用的系统 自由度)。
第四章部分自适应阵列处理技术
1
比较:
方式
全自适应
部分自适应
指标
在变换域 Y 用 W T ,o p t 进行最优波束形成,实际上 是对 X 进行波束形成,即:
d
t
W
Y H
T ,opt
t
W
T H
T ,opt
H
X
t
H
T W T ,opt X t
W H X t
其中:WTWT,opt
第四章部分自适应阵列处理技术
6
西安电子科技大学雷达信号处理实验室
一般地,TNM,MN,此时 T 不可逆,在变换域处理
简单子阵法 选取的子阵只是位置上靠近的阵元。 明显缺点:各子阵的相位中心通常超过半波长(甚 至几个波长),产生子阵间栅瓣。
第四章部分自适应阵列处理技术
7
西安电子科技大学雷达信号处理实验室
几种改进方法:
1) 使子阵间栅瓣出现于子阵方向图的零点位置。
例:33阵元合成为16个(采用滑动重叠技术)
如图3.1所示 (d )
IEEE,Trans,ASSP-35,1987,P1524~1532
深入系统研究了广义旁瓣相消结构(GSC处理器)
第四章部分自适应阵列处理技术
4
西安电子科技大学雷达信号处理实验室
§4.2阵元空间(element space)部分 自适应处理
1. Chapman方法:子阵级
对阵列数据 X 用降维矩阵作变换: Y M 1 T H X N 1 其 中 T N M ,M N
2. Morgan,Partially Adaptive Array Techniques IEEE,Trans,AP-26,1978,P823~833多重旁瓣对消 器(MSC)
3. Gabriel, Using Spectral Estimation Techniques in Adaptive Processing Antenna Systems.IEEE,AP34,1986,No.3,P291~300 自适应方法
w1 w2 wK wN
w01 w02
有几个干扰复 用几个阵元进 行自适应处理 相消
mt
yt
图3.4
第四章部分自适应阵列处理技术
12
西安电子科技大学雷达信号处理实验室
M=1 单旁瓣相消器
选取的阵元数 M >1多旁瓣相消器
当 MN, 全自适应
MCS中的问题: 1 、对几个点干扰抑制问题,选取自适应单元 几乎可任意。 2 、对很多干扰或连片的地物杂波,如何选取 自适应处理单元有待于进一步研究。
10
西安电子科技大学雷达信号处理实验室
2) 非均匀划分,使各子阵内的阵元数不等,破坏栅 瓣的出现。如图3.3
12 3 4 5 6
33
1
2
3 16
图3.3
第四章部分自适应阵列处理技术
11
西安电子科技大学雷达信号处理实验室
2、Morgan的MSC方法:阵元级
1 2 KN
选用取固部定分权单(元非自进适行自应适)进应加行权处理控制。,如而图其3.4余所单示元
变换前的自适应: Wopt R X1a0
变换后的自适应处理:
RYEYtYHtETHXtXHtT
THRXT
第四章部分自适应阵列处理技术
5
西安电子科技大学雷达信号处理实验室
变换后的导向矢量为:aT0THa0
由最优波束形成原理,变换域的最优权为:
1
W T ,opt RY aT 0
(T H R X T )1T H a 0