输入输出信号清单
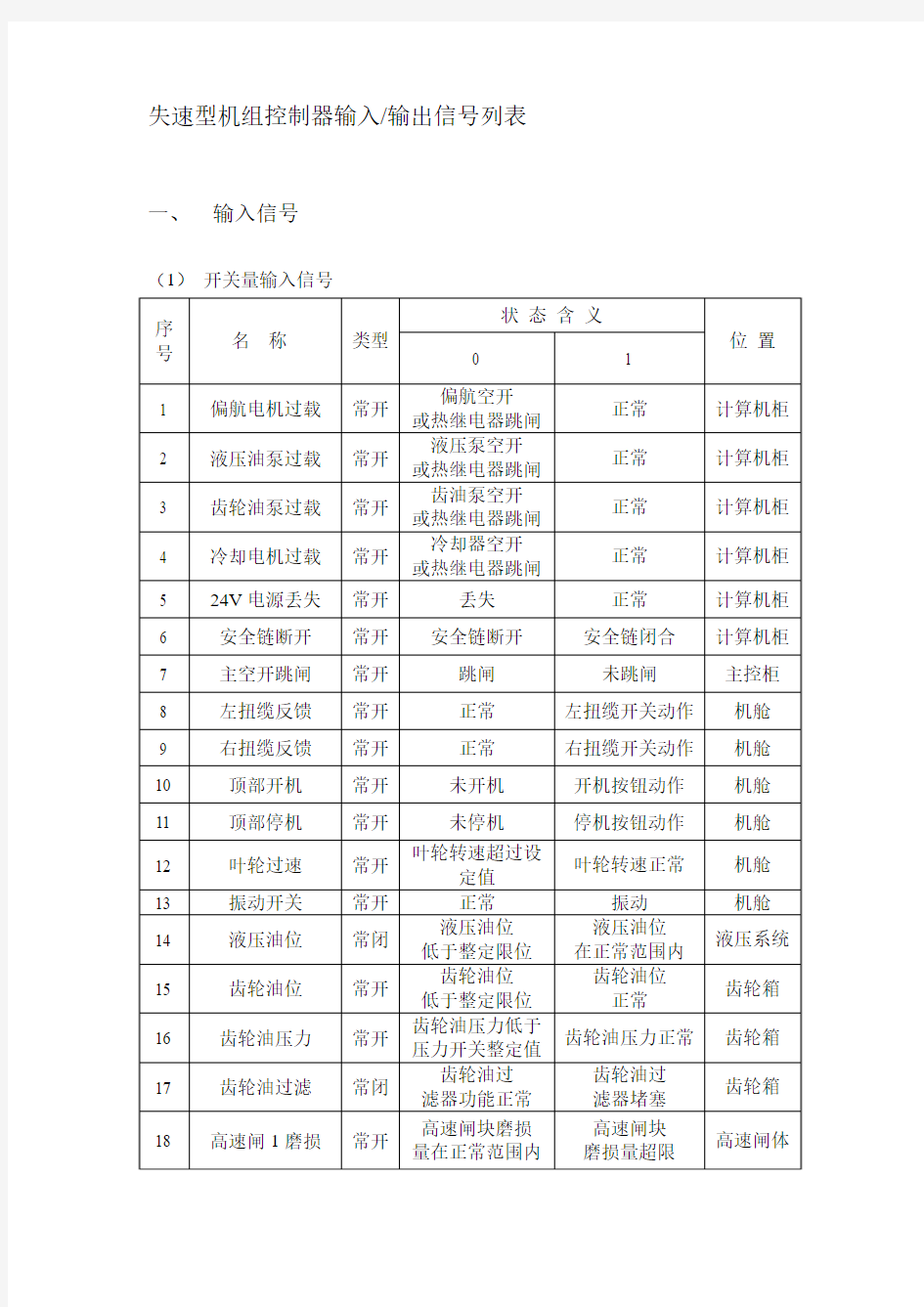
失速型机组控制器输入/输出信号列表一、输入信号
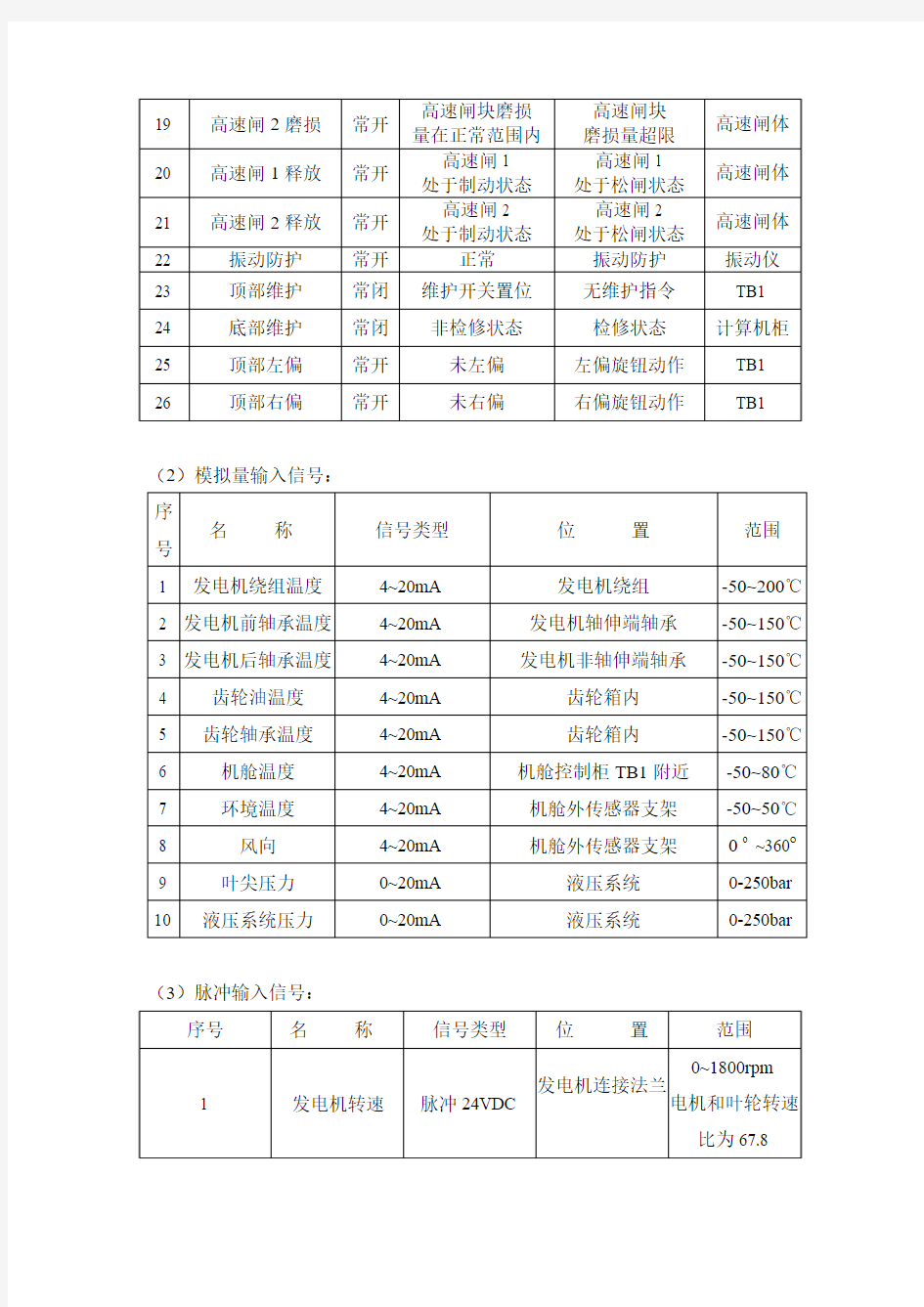
(1)开关量输入信号
(2)模拟量输入信号:
(3)脉冲输入信号:
(4)电量信号
二、输出信号(1)开关量输出信号
DSP技术与算法实现学习报告
DSP技术与算法实现学习报告 一.课程认识 作为一个通信专业的学生,在本科阶段学习了数字信号处理的一些基本理论知识,带着进一步学习DSP技术以及将其理论转化为实际工程实现的学习目的,选择了《DSP技术与算法实现》这门课程。通过对本课程的学习,我在原有的一些DSP基础理论上,进一步学习到了其一些实现方法,系统地了解到各自DSP芯片的硬件结构和指令系统,受益匪浅。 本门课程将数字信号处理的理论与实现方法有机的结合起来,在简明扼要地介绍数字信号处理理论和方法的基本要点的基础上,概述DSP的最新进展,并以目前国际国内都使用得最为广泛的德克萨斯仪器公式(TI,Texas Instruments)的TMS320、C54xx系列DSP为代表,围绕“DSP实现”这个重点,着重从硬件结构特点,软件指令应用和开发工具掌握出发,讲解DSP应用的基础知识,讨论各种数字信号处理算法的实现方法及实践中可能遇到的主要问题,在此基础上实现诸如FIR、IIR、FFT等基本数字信号处理算法等等。 1.TI的DSP体系 TI公司主要推出三大DSP系列芯片,即TMS320VC2000,TMS320VC5000,TMS320VC6000系列。 TMS320VC200系列主要应用于控制领域。它集成了Flash存储器、高速A/D转换器、可靠的CAN模块及数字马达控制等外围模块,适用于三相电动机、变频器等高速实时的工控产品等数字化控制化领域。 TMS320VC5000系列主要适用于通信领域,它是16为定点DSP芯片,主要应用在IP 电话机和IP电话网、数字式助听器、便携式音频/视频产品、手机和移动电话基站、调制调解器、数字无线电等领域。它主要分为C54和C55系列DSP。课程着重讲述了C54系列的主要特性,它采用改进哈弗结构,具有一个程序存储器总线和三个数据存储器总线,17×17-bit乘法器、一个供非流水的MAC(乘法/累加)使用的专用加法器,一个比较、选择、存储单元(Viterbi加速器),配备了双操作码指令集。 TMS320VC6000系列主要应用于数字通信和音频/视频领域。它是采用超长指令字结构设计的高性能芯片,其速度可以达到几十亿MIPS浮点运算,属于高端产品应用范围。
DSP常见算法的实现
3.6 常见的算法实现 在实际应用中虽然信号处理的方式多种多样,但其算法的基本要素却大多相同,在本节中介绍几种较为典型的算法实现,希望通过对这些例子(单精度,16bit )的分析,能够让大家熟悉DSP 编程中的一些技巧,在以后的工作中可以借鉴,达到举一反三的效果。 1. 函数的产生 在高级语言的编程中,如果要使用诸如正弦、余弦、对数等数学函数,都可以直接调用运行库中的函数来实现,而在DSP 编程中操作就不会这样简单了。虽然TI 公司提供的实时运行库中有一些数学函数,但它们所耗费的时间大多太长,而且对于大多数定点程序使用双精度浮点数的返回结果有点“大材小用”的感觉,因此需要编程人员根据自身的要求“定制”数学函数。实现数学函数的方法主要有查表法、迭代法和级数逼近法等,它们各有特点,适合于不同的应用。 查表法是最直接的一种方法,程序员可以根据运算的需要预先计算好所有可能出现的函数值,将这些结果编排成数据表,在使用时只需要根据输入查出表中对应的函数值即可。它的特点是速度快,但需要占用大量的存储空间,且灵活度低。当然,可以对上述查表法作些变通,仅仅将一些关键的函数值放置在表中,对任意一个输入,可根据和它最接近的数据采用插值方法来求得。这样占用的存储空间有所节约,但数值的准确度有所下降。 迭代法是一种非常有用的方法,在自适应信号处理中发挥着重要的作用。作为函数产生的一种方法,它利用了自变量取值临近的函数值之间存在的关系,如时间序列分析中的AR 、MA 、ARMA 等模型,刻画出了信号内部的特征。因为它只需要存储信号模型的参量和相关的状态变量,所以所占用的存储空间相对较少,运算时间也较短。但它存在一个致命的弱点,由于新的数值的产生利用了之前的函数值,所以它容易产生误差累积,适合精度要求不高的场合。 级数逼近法是用级数的方法在某一自变量取值范围内去逼近数学函数,而将自变量取值在此范围外的函数值利用一些数学关系,用该范围内的数值来表示。这种方法最大的优点是灵活度高,且不存在误差累积,数值精度由程序员完全控制。该方法的关键在于选择一个合适的自变量取值区间和寻找相应的系数。 下面通过正弦函数的实现,具体对上述三种方法作比较。 查表法较简单,只需要自制一张数据表,也可以利用C5400 DSP ROM 内的正弦函数表。 迭代法的关键是寻找函数值间的递推关系。假设函数采样时间间隔为T ,正弦函数的角频率为ω,那么可以如下推导: 令()()()T T ω?β?αω?-+=+sin sin sin 等式的左边展开为 T T side left ω?ω?sin cos cos sin _+= 等式的右边展开为 ()T T side right ω?βωα?sin cos cos sin _-+= 对比系数,可以得到1,cos 2-==βωαT 。令nT =?,便可以得到如下的递推式: [][][]21cos 2---=n s n s T n s ω
数字信号处理滤波器
1.设计物理可实现的低通滤波器 设计思路:因为要设计FIR有限脉冲响应滤波器,通常的理想滤波器的单位脉冲响应h是无限长的,所以需要通过窗来截断它,从而变成可实现的低通滤波器。程序如下: clc;clear all; omga_d=pi/5; omga=0:pi/30:pi; for N=3:4:51; w1= window(@blackman,N); w2 = window(@hamming,N); w3= window(@kaiser,N,2.5); w4= window(@hann,N); w5 = window(@rectwin,N); M=floor(N/2); subplot(311);plot(-M:M,[w1,w2,w3,w4,w5]); axis([-M M 0 1]); legend('Blackman','Hamming','kaiser','hann','rectwin'); n=1:M; hd=sin(n*omga_d)./(n*omga_d)*omga_d/pi; hd=[fliplr(hd),1/omga_d,hd]; h_d1=hd.*w1';h_d2=hd.*w2';h_d3=hd.*w3';h_d4=hd.*w4';h_d5=hd.*w5'; m=1:M; H_d1=2*cos(omga'*m)*h_d1(M+2:N)'+h_d1(M+1); H_d2=2*cos(omga'*m)*h_d2(M+2:N)'+h_d2(M+1); H_d3=2*cos(omga'*m)*h_d3(M+2:N)'+h_d3(M+1); H_d4=2*cos(omga'*m)*h_d4(M+2:N)'+h_d4(M+1); H_d5=2*cos(omga'*m)*h_d5(M+2:N)'+h_d5(M+1); subplot(312);plot(omga,[H_d1,H_d2,H_d3,H_d4,H_d5]); legend('Blackman','Hamming','kaiser','hann','rectwin'); subplot(313);plot(abs([fft(h_d1);fft(h_d2);fft(h_d3);fft(h_d4);fft(h_ d5)])'); pause(); end 程序分析: 整个对称窗的长度为N,然而为了在MATLAB中看到窗函数在负值时的形状需将N变为它的一半,即为2M+1个长度。窗长设置为从3开始以4为间隔一直跳动51。则长度相同的不同窗函数在时域[-M,M]的形状如第一个图所示。 对窗函数进行傅里叶变换时,将零点跳过去先构造一个一半的理想滤波器的脉冲响应hd,再将零点位置求导得出的数赋值进去。将生成的hd左右颠倒形成了一个理想的滤波器的脉冲响应。将构造的理想滤波器的脉冲响应依次与之前定义的窗函数相乘,相乘出来的为列向量,用转置将其变成行向量,形成的h_d就是非理想的低通滤波器的脉冲响应序列。因为h_d为对称奇数长度序列,它的DTFT 可以是二倍的离散余弦变化,而零点的位置则直接带入求出,两者相加则是H_d。则第二个图表示的是五个矩阵向量在频域的变化,而第三个图表示的是五个非理想低通滤波器的傅里叶变换,图三FFT给出的结果永远是对称的,因为它显示
视频输入输出接口和信号格式
视频输入输出接口和信号格式 一、传输接口 按照发展先后来概述: (1)CVBS:Composite Video Broadcast Signal,复合视频广播信号。 它是最早期的一种图像数据传输方法,是将模拟视频信号和声音信号结合,并调制到视频载波之前的一种格式。复合视频包含色差(色调和饱和度)和亮度信息,并将它们同步在消隐脉冲中,用同一信号传输。这种接口有3根线:白(左声道)、红(右声道)、黄(视频信号),如图所示: 由于是采用亮度和色度信号频谱间置方法复合在一起,所以会导致亮、色的串扰以及清晰度降低等问题。 (2)S-video:即S端子,它是将亮度信号Y和色度信号C分开传输,这样就可确保亮度和色度信号不相互干扰。 (3)VGA:Video Graghic Array,又叫显示绘图阵列,它采用非对称分布的15Pin 连接方式,共有15针,分成3排,每排5个孔。 (4)DVI:Digital Visual Interface,即数字视频接口。它采用全数字传输,可有效降低干扰和提高性能。对于DVI接口,有很多规范,常见的是DVI-D(Digital)和DVI-I(Integrated),DVI-I只能传输数字信号,可以用它来连接显卡和平板电视等。 (5)HDMI:High Definition Multimedia Interface,即高清晰度多媒体接口。它与DVI不同,可以同时传输视频和音频信号,由于音频和视频信号采用同一条电缆,可大大简化系统的安装。 除了上述有代表性的接口之外,另外还有一些典型接口,比如:色差分量接口(三基色输入)、SCART(欧洲通用视频接口)、BNC端口输入(R、G、B、行同步、场同步5个连接头),SDI(串行数字接口)等等。 二、视频输出的数字信号格式 相关名词: ITU:International Telecommunications Union (国际电信联盟)
数字传感器输出方式
数字传感器输出方式 数字输出传感器与数字信号驱动的其它激励器一样,常用于各类工业应用中。我们可很容易的找到数字输出的各类传感器,包括温度、流量、压力、速度等,它们具有各种格式的数字信号输出。 数字传感器是一种仅产生二值输出的传感器,相比于模拟输出传感器输出一定范围内连续变化的值,数字输出仅为“0”或“1”。数字传感器最简单的例子是触点开关。典型的触点开关是一个无限电阻的开路电路,当按下开关后则变为阻抗为零的电路。 1.干节点(通断信号) 干接点(Dry Contact),相对于湿接点而言,也被称之为干触点,是一种无源开关,具有闭合和断开的2种状态,2个节点之间没有极性,可以互换。常见的干节点信号有: 各种开关如:限位开关、行程开关、脚踏开关、旋转开关、温度开关、液位开关等; 各种按键; 各种传感器的输出,如:环境动力监控中的传感器:水浸传感器、火灾报警传感器、玻璃破碎、振动、烟雾和凝结传感器; 继电器、干簧管的输出。 2.湿节点(电压信号)
湿接点(Wet Contact),相对于干接点而言,也被称之为湿触点,是一种有源开关,具有有电和无电的2种状态,2个接点之间有极性,不能反接。工业控制上,常用的湿节点的电压范围是DC0~30V,比较标准的是DC24V,AC110~220V的输出也可以是湿节点,但这样做比较少。常见的湿节点信号有: 如果把干节点信号,接上电源,再跟电源的另外一极,作为输出,也是湿节点信号; NPN 三极管的集电极输出和VCC; 达林顿管的集电极输出和VCC; 红外反射传感器和对射传感器的输出; 3.源极输入 源极输入用于连接漏极输出设备,如图1所示。 图1源极输入示意图 漏极输出设备提供电源到地的电流通道,图2所示的NPN集电极开路为典型的漏极输出设备。当需要输出低电平时,三极管处于饱和状态,等效于输出端与地接通;输出高电平时,三极管处于截至状态,等效于输出端与地断开(输出端悬空)。
数字信号处理
数 字 信 号 处 理 发 展 和 应 用 学院:通信学院 专业:电子信息工程 班级:电信1103 姓名:XXX 学号:XXX
数字信号处理发展和应用 【摘要】数字信号处理(DSP)是广泛应用于许多领域的新兴学科,因其具有可程控、可预见性、精度高、稳定性好、可靠性和可重复性好、易于实现自适应算法、大规模集成等优点,广泛应用于实时信号处理系统中。本文概述了DSP 技术的发展历史,各个领域的应用状况,以及在未来的发展趋势。 【关键词】数字信号处理;数据处理;信息技术;发展趋势 一、数字信号处理(DSP)的发展历史 数字信号处理技术的发展经历了三个阶 段。 70 年代DSP 是基于数字滤波和快速傅立叶变换的经典数字信号处理,其系统由分立的小规模集成电路组成,或在通用计算机上编程来实现DSP 处理功能,当时受到计算机速度和存储量的限制,一般只能脱机处理,主要在医疗电子、生物电子、应用地球物理等低频信号处理方面获得应用。 80 年代DSP 有了快速发展,理论和技术进入到以快速傅立叶变换(FFT) 为主体的现代信号处理阶段,出现了有可编程能力的通用数字信号处理芯片,例如美国德州仪器公司(TI 公司) 的TMS32010 芯片,在全世界推广应用,在雷达、语音通信、地震等领域获得应用,但芯片价格较贵,还不能进入消费领域应用。 90 年代DSP 技术的飞速发展十分惊人,理论和技术发展到以非线性谱估计为代表的更先进的信号处理阶段,能够用高速的DSP 处理技术提取更深层的信息,硬件采用更高速的DSP 芯片,能实时地完成巨大的计算量,以TI 公司推出的TMS320C6X芯片为例,片内有两个高速乘法器、6 个加法器,能以200MHZ频率完成8 段32 位指令操作,每秒可以完成16 亿次操作,并且利用成熟的微电子工艺批量生产,使单个芯片成本得以降低。并推出了C2X、C3X、C5X、C6X 不同应用范围的系列,使新一代的DSP 芯片在移动通信、数字电视和消费电子领域得到广泛应用,数字化的产品性能价格比得到很大提高,占有巨大的市场。 二、数字信号处理(DSP)的主要应用领域 1·DSP在电力系统自动化中日益渗透 1.1数字信号处理(DSP)技术在电力系统模拟量采集和测量中的应用 计算机进入电力系统调度后,引入了EMS/DMS/SCADA的概念,而电力系统数据采集和测量是SCADA的基础部分。传统的模拟量的采集和获得,通过变送器将一次PT和CT的电气量变为直流量,再进行A/D转换送给计算机。应用了交流采样技术以后,经过二次PT、CT的变换后,直接对每周波的多点采样值采用DSP处理算法进行计算,得到电压和电流的有效值和相角,免去了变送器环节。这不仅使得分散布置的分布式RTU很快地发展起来,而且还为变电站自动化提供了功能综合优化的手段。 1.2数字信号处理(DSP)在继电保护中的应用 到目前为止,应用于我国电力系统的微机保护产品采用的CPU大多为单片机,由于受硬件资源及计算功能的限制,其采样能力及采样速度很难令人满意。因此,对非正常运行条件下的系统参数测量,在速度和精度上无法满足要求,一些复杂原理和算法的实现,基于常规CPU的保护产品也都难以胜任。基于DSP 的数据采集和处理系统由于其强大的数学运算能力和特殊设计,都使得它在继
数字信号数字内插
1、数字内插的概念 采样周期T 是许多信号处理技术和应用中首先要考虑的因素,它决定了信号处理过程实现的方便性、效率、和精度。在某些情况下,输入信号可能己经某个采样周期T 事先采样过,而我们的目的是要将这个已采样的信号转换成为一个以新的采样周期T 采样的信号,从而使这个处理后的信号仍对应于同一个原始的模拟信号;在另一些情况下,在一个处理方法中的不同部分以不同的采样速率进行处理可能会更方便或更有效,因此,也需要将系统中的信号采样速率进行转换。从数字信号处理的角度看,内插过程可通过线性滤波实现,这是讨论的基本点。 这种将信号采样频率从一个给定频率F=1/T 转换到另一个频率F ’=1/T ’的过程就称为采样频率转换。当新的采样频率高于原始频率F ’>F 或T>T ’时,称为插值;而当F ’ 计算机仿真技术实验指导书 河南科技大学电子信息工程学院 二〇〇八年二月 计算机仿真技术实验指导书 MATLAB是一种交互式的以矩阵为基本数据结构的系统。在生成矩阵对象时,不要求明确的维数说明。所谓交互式,是指MATLAB的草稿纸编程环境。 与C语言或FORTRON语言作科学数值计算的程序设计相比较,利用MATLAB可节省大量的编程时间。 本实验指导书主要讨论四个实验。 实验一信号与系统的时域分析以及信号合成与分解 1. 实验目的 (1) 连续时间信号的向量表示法和符号运算表示法,典型离散信号表示; (2) 连续信号和离散信号的时域运算与时域变换; (3) 连续系统和离散系统的卷积,以及冲激响应、阶跃响应、单位响应、零状态响应; (4) 周期信号的傅立叶级数分解与综合(以周期方波为例); 2. 实验原理与方法 (1) 信号在MATLAB中的表示方法 MATLAB用两种方法来表示连续信号,一种是用向量的方法来表示信号,另一种则是符号运算的方法来表示信号。用适当的MATLAB语句表示出信号后,就可以利用MATLAB的绘图命令绘制出直观的信号时域波形。 向量表示法表示信号的方法是:MATLAB用一个向量表示连续信号的时间范围,另一个向量表示连续信号在该时间范围内的对应样值。如下列代码p=0.001; t=-pi:p:pi; f=1+cos(t); plot(t,f) title('f(t)=1+cos(t)') xlabel('t') axis([-pi,pi,-0.2,2.4]) 执行后即可绘制连续信号1+cos(t)的时域波形。 借助于符号运算以及符号绘图函数ezplot,也可以绘制连续信号时域波形。如下列代码 syms t f=sym('1+cos(t)') %定义符号表达式 ezplot(f,[-pi,pi]) %绘制符号表达式波形 set(gcf,'color','w') %设置当前图形背景颜色为白色 执行后即可绘制连续信号1+cos(t)的时域波形。 与连续信号的表示相似,在MATLAB中,离散信号也需要用两个向量来表示,其中一个向量表示离散信号的时间范围,另一个向量表示该离散信号在该时间范围内的对应样值。但与连续信号表示有所不同的是,表示离散信号时间范围向量的元素必须为整数。如下列代码 n=[-3,-2,-1,0,1,2,3]; x=[-3,2,-1,3,1,-2,1]; stem(n,x,'filled') set(gcf,'color','w') title('x(n)') xlabel('n') 执行后即可绘制离散信号x(n)={ -3,2,-1,3,1,-2,1}的时域波形。 ↑ n=0 (2) 连续信号和离散信号的时域运算与时域变换 对连续信号而言,其基本时域变换有反褶、平移、尺度变换、倒相。 利用MATLAB的符号运算功能以及符号绘图函数ezplot,可以直观的观察和分析连续信号的时域运算与时域变换。如下列代码 syms t; f=sym('(t+1)*(heaviside(t+1)-heaviside(t))'); f=f+sym('(heaviside(t)-heaviside(t-1))'); %定义信号符号表达式 ezplot(f,[-3,3]) %绘制信号波形 axis([-3,3,-1.2,1.2]) set(gcf,'color','w') 信号类型 组态设置 表中显示了如何使用组态DIP开关来组态EM 231模块。所有输入设置为相同的模拟量输入量程。在该表中,ON是闭合,OFF是断开。只在电源接通时读取开关设置。 表A-21组态开关表用于为EM 231模拟量输入和4/8 输入(括号中为8输入)选择模拟量输入范围。当采用8输入模块以及开关3、4和5选择模拟量输入范围时,使用开关1和2来选择电流输入模式。开关1打开(ON)为通道6选择电流输入模式;关闭(OFF)选择电压模式。开关2打开(ON)为通道7选择电流输入模式;关闭(OFF)选择电压模式。 EM231 热电阻模块的配置 EM 231热电阻模块DIP开关(订货号6ES7 231-7PB22-0XA0) 注:4模拟量输入EM231(订货号6ES7 231-7PC22-0XA0)拨码开关设置与EM231 RTD,2模拟量输入模块相同。8 输入EM231 TC 热电偶模块(订货号6ES7 231-7PF22-0XA0)拨码开关设置与EM231 TC,4 模拟量输入模块相同。 表A-25 RTD类型DIP开关1-5设定。 DIP开关默认就好。除非你的PT100传感器比较精密或是特殊制式。 PT0.003850、PT0.003916都是PT100的。 前者是ITS-90温标的PT100 ,其α=0.003851, 后者是日本JIS标准的PT100 ,其α=0.003916, 两者0度时的阻值都是100Ω,但100度时阻值不同。 一般国产的PT100都是前者。 相关信息来源于:西门子技术论坛网友葫芦娃 追问 一般都是这个:PT0.003850?回答很全面 回答 是的,就是拔码开关SW1-SW6均为0所对应的输入类型 要使DIP开关设置起作用,需要重新给PLC和/或用户的24V电源上电。可以通过设定DIP开关1、2、3、4和5来选择RTD的类型。接线方式只影响精度问题。 機器人之専用輸出輸入接続配置於如下図之CRM2A Connector上、其中接続 01(IMSTP)、02(HOLD)、03(SFSPD)要連接B接點。 周辺機器INTERFACE A1 専用輸入信號 1 IMSTP(Immediate Stop)緊急停止 1.1 意義: SOFTWARE 上之紧急停止“IMSTP 回路连接B 接点”回路“开”后、成为紧急停止状态。 1.2 信號之使用範例(Relay 或 PLC): 1.3 注意: 本回路“B 接点”未使用时要回路短络。因为机器人紧急停止对机械部份之负荷大、所以基本上机器人要一时停止时、使用“HOLD ”。另外B 接点为常闭开关、A 接点为常开开关。 2 HOLD(一時停止) 2.1 意義: 一时停止的信号输入时、回路在OFF 状态、机器人将减速停止。机器人成为PAUSE 状态。再度啓動時、HOLD 信號ON 後、START 以PULSE 信號輸出。 安全PLUG X010 緊急SW X011(B 接點) IMSTP Y100 教導MODE SW X012 機器人動作中 HOLD(一時停止) ON OFF START(再度啓動) O N OFF 2.2 信號之使用範例(Relay 或 PLC):注意: 本回路“B 接点”未使用时要回路短络。 2.3 備詿: HOLD 与IMSTP 输入后、机器人停止时的差异。 *IMSTP ……马达电源切断 “紧急时使用” *HOLD ……?马达减速后停止 “平常运转时使用” 3 SFSPD(SAFETY SPEED)安全速度 3.1 意義: 安全栅内之教导作业时使用。本信号OFF 时、外部启动输入信号(如RSR /PNS 或START)无効、以确保作业者之安全。又机器人自动运转中、本信号OFF 时机器人暂时停止。此时可用教导盘操作机器人。又、教导或再启动暂时停止的机器人时有速度制限。 3.2 信號之使用範例(Relay 或 PLC): 3.3 注意: 本回路“B 接点”未使用时要回路短络。 3.4 備詿: SFSPD 有効时、限制速度可由系统変数设定。例如: * $SCR.$FENCEORD:設定安全柵開時的最高速度。 * $SCR.$SFJOGVLIM:設定完全柵開時、JOG 操作的最高速度。 * $SCR.$SFRUNOVLIM:设定安全栅开时、程序执行中的最高速度。 一時停止按鈕 X101 機器人停止 M100 HOLD Y101 安全PLUG X010 SFSPD Y102 离散傅里叶变换 一、问题的提出:前已经指出,时域里的周期性信号在频域里表现为离散的值,通常称为谱线;而时域里的离散信号(即采样数据)在频域里表现为周期性的谱。 推论:时域里的周期性的离散信号,在频域里对应为周期性的离散的谱线。 由于傅里叶变换和它的反变换的对称性,我们不妨对称地把前者称为时域的采样,后者称为频域的采样;这样,采用傅里叶变换,时域的采样可以变换成为频域的周期性离散函数,频域的采样也可以变换成列域的周期性离散函数,这样的变换被称为离散傅里叶变换,简称为DFT。图3-1就是使用采样函数序列作离散傅里叶变换的简单示例。 (a )时域的采样在频域产生的周期性 (b )频域的采样在时域产生的周期性 图3-1 采样函数的离散傅里叶变换 上图就是使用采样函数序列作离散傅立叶变换的简单示例,在时域间隔为s t 的采样函数 序列的DFT 是频域里间隔为s s t f 1 =的采样函数序列;反之,频域里间隔为s f 的采样函数序列是时域里间隔为w W f T 1=的采样函数序列,如图3-1(b)所示。 由于在离散傅立叶变换中,时域和频域两边都是离散值,因此它才是真正能作为数字信号处理的变换,又由于变换的两边都表现出周期性,因此变换并不需要在),(+∞-∞区间进行,只需讨论一个有限周期里的采样作变换就可以保留全部信息。 表3-1为傅立叶变换和傅立叶级数的关系 二、DFT 的定义和性质 离散傅里叶变换(DFT )的定义为: 1、非周期离散时间信号)(n x 的Fourier 变换定义为:ωωωd e n x e X n j j -∞ ∞-∑ =)()( (1) 反变换:ωπωππωd e e X n x n j j ?-= )(21)( )(ωj e X 的一个周期函数(周期为)π 2,上式得反变换是在)(ωj e X 的一个周期内求积分的。这里数字信号的频率用ω来表示,注意ω与Ω有所不同。设s f 为采样频率,则采样周期为 f T 1 =,采样角频率T s π2=Ω,数字域的频率s s f πω2= 式1又称为离散时间Fourier 变换(DTFT )2、周期信号的离散Fourier 级数(DFS ) 三、窗函数和谱分析 1、谱泄露和栅栏效应 离散傅立叶变换是对于在有限的时间间隔(称时间窗)里的采样数据的变换,相当于对数据进行截断。这有限的时间窗既是DFT 的前提,同时又会在变换中引起某些不希望出现的结果,即谱泄露和栅栏效应。 1)谱泄露 以简单的正弦波的DFT 为例,正弦波具有单一的频率,因而在无限长的时间的正弦波,应该观察到单一δ函数峰,如下图示,但实际上都在有限的时间间隔里观察正弦波,或者在时间窗里作DFT ,结果所得的频谱就不再是单一的峰,而是分布在一个频率范围内,下图(b )示。这样信号被时间窗截断后的频谱不再是它真正的频谱,称为谱泄露。 一. 填空题 1、一线性时不变系统,输入为x(n)时,输出为y(n);则输入为2x(n)时,输出为2y(n) ;输入为x(n-3)时,输出为y(n-3) 。 2、从奈奎斯特采样定理得出,要使实信号采样后能够不失真还原,采样频率fs与信号最高频率 f max关系为:fs>=2f max。 3、已知一个长度为N的序列x(n),它的离散时间傅立叶变换为X(e jw),它的N点离散傅立叶变换X(K)是关于X(e jw)的N 点等间隔采样。 4、有限长序列x(n)的8点DFT为X(K),则X(K)= 。 5、用脉冲响应不变法进行IIR数字滤波器的设计,它的主要缺点是频谱的交叠所产生的现象。 6.若数字滤波器的单位脉冲响应h(n)是奇对称的,长度为N,则它的对称中心是(N-1)/2 。 7、用窗函数法设计FIR数字滤波器时,加矩形窗比加三角窗时,所设计出的滤波器的过渡带比较窄,阻带衰减比较小。 8、无限长单位冲激响应(IIR)滤波器的结构上有反馈环路,因此是递归型结构。 9、若正弦序列x(n)=sin(30nπ/120)是周期的,则周期是N= 8 。 10、用窗函数法设计FIR数字滤波器时,过渡带的宽度不但与窗的类型有关,还与窗的采样点数有关 11.DFT与DFS有密切关系,因为有限长序列可以看成周期序列的主值区间截断,而周期序列可以看成有限长序列的周期延拓。 12.对长度为N的序列x(n)圆周移位m位得到的序列用x m(n)表示,其数学表达式为x m(n)= x((n-m))N R N(n)。 13.对按时间抽取的基2-FFT流图进行转置,并将输入变输出,输出变输入即可得到按频率抽取的基2-FFT流图。 14.线性移不变系统的性质有交换率、结合率和分配律。 15.用DFT近似分析模拟信号的频谱时,可能出现的问题有混叠失真、泄漏、栅栏效应和频率分辨率。 16.无限长单位冲激响应滤波器的基本结构有直接Ⅰ型,直接Ⅱ型,串联型和并联型四种。 17.如果通用计算机的速度为平均每次复数乘需要5μs,每次复数加需要1μs,则在此计算机上计算210点的基2 FFT需要10 级蝶形运算,总的运算时间是______μs。 二.选择填空题 1、δ(n)的z变换是 A 。 物理学与信息科学技术专题 第十讲 数字信号处理与数字信号处理器(D SP) 1) 李昌立 1, 董永宏 2 (1 中国科学院声学研究所 北京 100080)(2 闻亭数字系统(北京)有限公司 北京 100085) 摘 要 文章简要介绍了“数字信号处理”与“数字信号处理器(DSP )”的发展历史.在数字信号处理的应用中,实时实现是非常重要的,而DSP 在实时处理中,扮演了一个重要的角色.文章中还介绍了DSP 在实际应用中的一些关键技术,例如DSP 的种类和选型,DSP 的开发工具,实时软件的开发过程等.最后,还介绍了一些DSP 的应用实例,如语音编码器,视频电话和视频会议系统,用于雷达和声纳的DSP 并行处理系统 关键词 数字信号处理器(DSP ),实时信号处理,DSP 开发工具,DSP 并行处理系统. D i g it a l si gna l processi n g and processors L I Chang 2L i 1, DONG Yong 2Hong 2 (1Institute of Acoustics ,Chinese A cade m y of Sciences,B eijing 100080,China ) (2W intech D igitalsyste m s Technology corp,B eijing 100085,China ) Abstract The history of digital signal p r ocessing and the digital signal p r ocess or (DSP )is reviewed .A s is well known,real -ti me i mp lementation is crucial in the app licati ons of digital signal p rocessing in which the DSP p lays an i m portant role .Certain key techniques,such as the types and type selecti on of DSPs,their devel 2opment equipment,real -ti me s oft ware development and s o on are then described .Finally,s ome p ractical ap 2p licati ons such as s peech coding hardware,video telephone and video conference system s,DSP parallel p ro 2cessing system s for s onar and radar are als o described Keywords digital signal p r ocess or,real -ti me signal p r ocessing .development equi pment,parallel p r ocess 2ing system 1) 该专题的第一至第九讲分别发表于2005年第1—8期,第12期 《物理》———编者注 2005-09-27收到初稿,2006-03-14修回 通讯联系人.Email:li_chang_li_cn@hot m ail .com 1 数字信号处理与数字信号处理器(DSP )发展史的简要回顾[1—3] DSP 既是D igital Signal Pr ocessing 的缩写,也是D igital Signal Pr ocess or 的缩写,前者是指数字信号 处理的理论和方法,后者则是指用于数字信号处理的可编程微处理器.我们所说的DSP 技术,一般是指将DSP 处理器用于完成数字信号处理的方法和技术. 自从1965年库利(Cooley )和图基(Tukey )在 《计算数学》(《Mathe matic of Computati on 》 )上发表了《用机器计算复序列傅里叶级数的一种方法》一文以后,接着又有人发表了在计算机上用差分方程实现滤波器的算法,以及用计算机设计数字滤波器 的各种方法.此后,“数字信号处理”这一分支学科迅速发展,逐渐形成了一整套较为完整的学科领域和理论体系.到今天,“数字技术”已经渗透到各行各业,成为了高新技术的代名词.很多传统产业采用 第五讲音视频输入\输出信号格式与接口 一、视频信号类型及接口 我们在《音视频系统工程基础》课程中已经对音视频系统中各类常见信号接口的知识进行了学习,接下来,我们对各类信号,尤其是视频信号进行比较分析。在实际的工程技术中,随着视频清晰度的不断提高,从早期的RF信号开始,经历了AV、S-video、YCbCr\YPbPr、VGA、DVI、HDMI等各种信号类型。 1. RF:电视机上的TV接口又称RF射频输入接口,这是最早在电视机上出现的接口,用于接收从天线接收到的电视信号,目前在有线电视领域也是一个常用的接口。RF信号是视频信号(CVBS)和音频信号(Audio)混合编码生成的一种高频调制信号(RF),采用同轴电缆传输,由于音视频信号之间相互干扰较大,它的视频清晰度是视频信号中最低的,但采用75Ω阻抗的线材减少了阻抗不匹配和信号反射对于图像的影响,适合于长距离传输。 2. Video:这类接口通常与音频接口(Audio)一起称为AV接口,又称RCA接口(俗称莲花头),AV信号是对RF信号的改进,也是最常见的音视频连接方式。一般来说,传输AV信号用三根信号线,传输Video信号的线头接口用黄色表示,音频信号分为左右声道分别用红色和白色表示。AV信号的改进之处在于将视频信号和音频信号分离传输,在成像方面很大程度避免了视频与音频相互干扰对画质的影响,但由于Video信号依旧是将亮度信号和色度信号进行混合传输,因此,也称Composite复合视频端口,需要在终端显示设备上需要进行对亮度和色度的分离,色度、亮度的相互干扰以及分离过程造成的信号损失使得画面并不是特别出色,水平清晰度在300电视线左右。目前,AV接口广泛用于电视与DVD连接,也是每台电视必备的接口之一。 3. S-video:称为S端子,是Super-Video(超级视频信号)或Separate-Video(分离视频信号)的简称。S-video接口分别用两条75欧的同轴电缆传输模拟视频信号,一条电缆传送亮度信号,另一条电缆传送色度信号。S-video与Video不同的是将亮度和色度信号分开传输,减少了影像在“分离”、“合成”转换过程中的信号损失,降低了设备内信号干扰而产生的图像失真,能够有效的提高画质的清晰程度。S端子支持设备最大显示分辨率为1024*768,常见的S-video接口有三种:4针、7针和9针。目前,电视机、影碟机、投影机等设备配接的都是4针插头,而实际上是一种五芯接口,由两路亮度信号(亮度信号和亮度信号接地)、两路色度信号(色度信号和色度信号接地)和一路公共屏蔽地线共五条芯线组成,使用时要注意插入的方向和位置,以免弄弯针头。 4. YCbCr\YPbPr:YCbCr\YPbPr指分量信号(Component)也称色差信号,实质上是将S-video的色度信号再分解为色差Cr、Cb,这样就避免了两路色差混合编码和分离的过程。一般利用三根信号线将视频信号分离成亮度(Y)信号和两路色差信号(去掉亮度信号后的色彩差异信号Cb、Cr)进行传输,在三条线的接头处分别用绿、蓝、红色进行区别,这三条线如果相互之间插错了,可能会显示不出画面或是显示出奇怪的色彩,其所还原的信号质量比Video和S-video好。色差分为逐行和隔行显示, YCbCr表示的是隔行,YPbPr表示则是逐行,如果电视只有YCbCr分量端子的话,则说明电视不能支持逐行分量,用YPbPr分量端子的话则支持逐行和隔行两种分量。目前档次较高的电视一般拥有2组或3组分量接口,而稍差一些的电视可能只有一组隔行,色差分量信号在DVD、PS2、XBOX、NGC等视频设备上都可以使用。 5. RGBHV信号:将视频信号分解为“R、G、B、H、V”五种信号,利用三基色原理对图像进行编码,即红、绿、蓝三种视频信号外加行(黑色)、场(黄色)同步信号,分别使用五根BNC线进行传输。除此之外,RGsB、RsGsBs、RGBs均是常见传输模式。 RGsB:同步信号附加在绿色通道,使用三根同轴电缆进行传输; 实验2 基2时域抽选的FFT 程序设计与调试 一、实验目的 掌握信号处理,尤其是数字信号处理的基本原理和方法。要求能通过实验熟练掌握基2时域抽选的快速傅立叶变换算法(FFT )的基本原理,了解二维及多维快速傅立叶变换算法。 二、实验原理 1.复数类型 对于FFT 算法涉及的复数运算,使用自定义的COMPLEX 来定义复数类型,其使用方法与常规类型(如int,float,double )相似。 typedef struct { float real, imag; } COMPLEX; 2.FFT 基本原理 FFT 改进了DFT 的算法,减少了运算量,主要是利用了旋转因子W 的两个性质: (a )W 的周期性:W = W (b) W 的对称性:W =-W FFT 把N 点DFT 运算分解为两组N/2点的DFT 运算,然后求和: )()()(21k X W k X k X k N += 1,,1,0 ),()()2 (2 21-=-=+ N k N k k X W k X N k X 其中, ∑∑∑∑-=-=-=-=+== = = 1 1 2 21 1 112 2 2 2 2 2 2 2 )12()()()2()()(N N N N N N N N r rk r rk r rk r rk W r x W r x k X W r x W r x k X 在计算X 1(k)与X 2(k)时,仍利用上述公式,把它们看成是新的X(k)。如此递归下去,便是FFT 算法。 3.蝶形运算 从基2时域抽选FFT 运算流图可知: ① 蝶形两节点的距离为2m-1,其中,m 表示第m 列,且m =1,… ,L 。 例如N=8=23, 第一级(列)距离为21-1=1, 第二级(列)距离为22-1=2, 第三级(列)距离为23-1=4。 ② 考虑蝶形运算两节点的距离为2m-1,蝶形运算可表为: X m (k)=X m-1(k)+X m-1(k+2m-1) W N r X m (k+2m-1)= X m-1(k)-X m-1(k+2m-1) W N r 由于N 为已知,所以将r 的值确定即可确定W N r 。为此,令k=(n 2n 1n 0)2 ,再将k 左移(L-m)位,右边位置补零,就可得到(r)2 的值,即(r)2 =(k)22L-m 。 例如 N=8=23 数字滤波器中的应用综述(matlab) 1数字滤波器的设计 1.1基本概念 数字滤波器(Digital Filter,简称DF)是指输入、输出均为数字信号,通过一定运算关系改变输入信号所含频率成分的相对比例或者滤除某些频率成分的器件。DF有许多不同的分类方法,但总体上可以分成两大类。一类是经典滤波器,即一般的滤波器,特点是输入信号中有用的频率成分和希望滤除的频率成分各占不同的频带;另一类是现代滤波器,特点是有用信号和干扰信号频带有重叠。DF根据其冲激响应函数的时域特性,可分为两种,即无限长冲激响应(IIR)滤波器和有限长冲激响应(FIR)滤波器。IIR滤波器的特征是具有无限持续时间冲激响应。这种滤波器一般需要用递归模型来实现。FIR 滤波器的冲激响应只能持续一定时间,在工程实践中可以采用递归与非递归两种方式实现。数字滤波器的设计方法有多种,如脉冲响应不变法、双线性变换法、窗函数设计法、插值逼近法和Chebyshev 逼近法等等。 1.2数字滤波器的实现方法 数字滤波器的实现方法一般有以下几种:①采用加法器、乘法器、延时器设计专用的滤波电路;②在通用计算机系统中加上专用的加速处理机设计实现;③在通用的可编程DSP芯片实现;④用专用 的DSP芯片实现。在一些特殊的场合,要求的信号处理速度极高, 用通用DSP芯片很难实现实时处理;⑤采用FPGA/CPLD设计实现; ⑥软件实现方法。按照原理和算法,自己编写程序或者采用现成的程序在通用计算机上实现,MATLAB设计数字滤波器的方法属于这种。 1.3数字滤波器设计的基本步骤 1)确定指标.在设计一个滤波器之前,必须首先根据工程实际的需要确定滤波器的技术指标。在很多实际应用中,数字滤波器常常被用来实现选频操作。因此,指标的形式一般在频域中给出幅度和相位响应。幅度指标主要以两种方式给出。第一种是绝对指标,它提供对幅度响应函数的要求,一般应用于FIR滤波器的设计。第二种指标是相对指标,它以分贝的形式给出要求,在工程实践中,这种指标最受欢迎。对于相位指标形式,通常希望系统在通频带中有线性相位。运用线性相位响应指标进行滤波器设计具有以下优点:①只包含实数算法,不涉及复数算法;②不存在延迟失真,只有固定数量的延迟;③长度为N的滤波器,计算量为N/2数量级。 2)逼近。确定了技术指标后,就可以建立目标的数字滤波器模型。通常采用理想的数字滤波器模型。之后,采用数字滤波器的设计方法,设计出实际滤波器模型来逼近给定的指标。 3)性能分析和计算机仿真。上两步的结果是得到以差分或系统函数或冲激响应描述的滤波器。根据这个描述就可以分析频率特性和相位特性,以验证设计结果是否满足指标要求;或者利用计算机仿数字信号处理和滤波器设计
200模块输入输出信号类型
専用输入输出信号
数字信号处理 详细分析 采样
数字信号处理试题和答案
数字信号处理与数字信号处理器
音视频输入输出信号格式与接口
信号处理 FFT算法
数字信号