绘制根轨迹法则
根轨迹的绘制法则

▼
a
6、 根轨迹的渐近线 ——有独立的(n-m)条
渐近线包括 ⑴ 渐近线的倾角 设在无穷远处有特征根sk ,则s平面上所有开环有限零点 渐近线的倾角 渐近线的交点 两方面内容
-zi和极点-pj到sk的矢量辐角都相等,即:i=j=
代入幅角条件,得:
本 节 返 回
根轨迹的绘制法则
绘制根轨迹的一般法则
本 章 返 回
根轨迹的绘制法则
绘制根轨迹的一般法则
绘制根轨迹应确定以下几个方面的内容: (9项) 起点、终点、根轨迹数、实轴上的根轨迹、
分离点和汇合定、根轨迹的渐近线、根轨迹的出射
本 节 返 回
角和入射角、根轨迹和虚轴的交点、根轨迹的走向。 注意:实际绘制根轨迹时应根据具体情 况有选择性地考虑以上9项内容。
本 节 返 回
本 章 返 回
4.2 根轨迹的绘制方法
5、分离点与会合点
D' (s) N(s) N' (s)D(s) 0
注意:
求出s=-d后,应把它代入特征方程计算Kd, 只有Kd为正值, s=-d才是分离点或会合点。 6、根轨迹的渐近线
本 节 返 回
180 (1 2 ) 渐近线的倾角: nm
本 节 返 回
N (s) D(s)
j 1 i 1 n
m
( s zi )
sm sn
i 1 n j 1
m
zi s m 1
z
i 1 n j 1
m
i
本 章 返 回
(s p j )
p j s n 1
p
根轨迹的绘制法则

例2:系统的特征方程为:
*
求根轨迹分离点。
*
K 1 G( s) H ( s) 1 0 s ( s 1)( s 2)
jω
j 2 ( K * 6)
解:因为系统根轨迹方程为:
K 1 s ( s 1)( s 2)
K s ( s 1)( s 2)
*
(4) 实轴上的根轨迹区间为:
j 2*
j 2
( K * 6)
( K 6)
(, 2];[1, 0]
法则5:根轨迹轨迹的分离点。 两条或两条以上的根轨迹分支在s平面上相 遇又立即分开的点,称根轨迹的分离点。 一般常见的分离点多位于实轴上 , 但有时 也产生于共轭复数对中。分离点必然是重根点, 系统的闭环特征方程写为
j i
j 1
j i
证明: 在根轨迹上靠近起点P1较远处取一点S1,显然满足 相角条件,有 ( s1 z1 ) [( s1 p1 ) ( s1 p2 ) ( s1 p3 )] (2k 1) jω s1
当S1无限趋近于P1点时, θ p1 p 1 即 ( s1 p1 ) 为P1点的 θ 出射角 p ,一般情况下, φ z1p1 p3 0 开环复数极点Pk的出射 z1 θ p2p1 角为: m m
法则3:根轨迹的渐近线。 如果开环零点的数目m小于开环极点数n, 即 n>m, 则有(n-m)条根轨迹沿着某条渐近线终止 于无穷远处。 渐近线的可由下面的方程决定。 渐近线与实轴的交点坐标:
a
p z
i 1 i j 1
n
m
j
nm
渐近线与实轴正方向的夹角:
(2k 1) a nm (k 0,1, 2 n m 1)
42根轨迹绘制的基本法则
Kr
s p sz
i 1 j 1 m
n
j
i
规则八、 根轨迹的出射角:
在开环复数极点px处,根轨迹的出射角为:
出x 180 ( p x zi ) ( p x p j )
●
当s0一点点趋近p3时,可认为 p 3 为 p3 处的出射角 出 。
P4
×
l 而ψp1、ψp2、ψp4、ψz都分别趋近于各开环零
极点相对于P3点的向量的相角。
p3 1800 l z ( p1 p 2 p 4 )
此时,出射角 出可以计算:
P2
p3
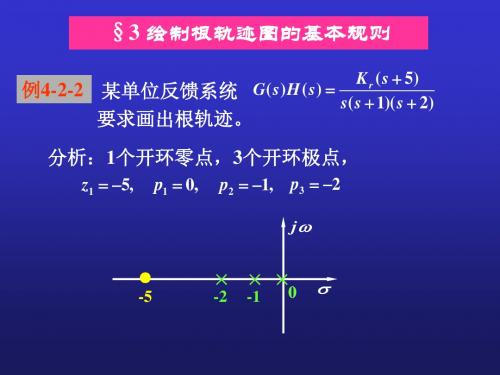
G( s) H ( s)
K r ( s 5) s( s 1)( s 2)
2、确定根轨迹根数
Kr=.084
j
j 5, Kr 3
0
﹣.447
●
× × ×
﹣2 ﹣1
6、求与虚轴交点
﹣5
1
j 5, Kr 3
8、求出特殊点对应的Kr值
规则九:Kr值由根轨迹幅值条件求出: 如分离点(-0.447,j0)处的Kr值:
对于例题,3条根轨迹始于3个开环极点,一条止 但在参数根轨迹中,有可能出现在等效开环传递函数中。 于开环零点,另两条(n-m=2)趋于无穷远处。
根轨迹的对称性:根轨迹各分支是连续的, *规则三、 且对称于实轴。
证明:(1)连续性 系统开环根轨迹增益 Kr (实变量)与复变量s有一一
对应的关系,当Kr由零到无穷大连续变化时,描述系 统特征方程根的复变量s在平面上的变化也是连续的, 因此,根轨迹是n条连续的曲线。 证明:(2)对称性 由于实际的物理系统的参数都是实数,若它的特征 方程有复数根,一定是对称于实轴的共轭复根,因此, 根轨迹总是对称于实轴的。
绘制根轨迹的基本法则

4.2 绘制根轨迹的基本法则本节讨论根轨迹增益*K (或开环增益K )变化时绘制根轨迹的法则。
熟练地掌握这些法则,可以帮助我们方便快速地绘制系统的根轨迹,这对于分析和设计系统是非常有益的。
法则1 根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环零点个数m 少于开环极点个数n ,则有)(m n -条根轨迹终止于无穷远处。
根轨迹的起点、终点分别是指根轨迹增益0=*K 和∞→时的根轨迹点。
将幅值条件式(4-9)改写为∏∏∏∏==-==--=--=mi inj j mn m i i nj jsz sp sz s ps K 1111*|1||1||)(||)(|(4-11)可见当s=j p 时,0*=K ;当s=i z 时,∞→*K ;当|s|∞→且m n ≥时,∞→*K 。
法则2 根轨迹的分支数,对称性和连续性:根轨迹的分支数与开环零点数m 、开环极点数n 中的大者相等,根轨迹连续并且对称于实轴。
根轨迹是开环系统某一参数从零变到无穷时,闭环极点在s 平面上的变化轨迹。
因此,根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。
实际系统都存在惯性,反映在传递函数上必有m n ≥。
所以一般讲,根轨迹分支数就等于开环极点数。
实际系统的特征方程都是实系数方程,依代数定理特征根必为实数或共轭复数。
因此根轨迹必然对称于实轴。
由对称性,只须画出s 平面上半部和实轴上的根轨迹,下半部的根轨迹即可对称画出。
特征方程中的某些系数是根轨迹增益*K 的函数,*K 从零连续变到无穷时,特征方程的系数是连续变化的,因而特征根的变化也必然是连续的,故根轨迹具有连续性。
法则3 实轴上的根轨迹:实轴上的某一区域,若其右边开环实数零、极点个数之和为奇数,则该区域必是根轨迹。
设系统开环零、极点分布如图4-5 所示。
图中,0s 是实轴上的点,)3,2,1(=i i ϕ是各开环零点到0s 点向量的相角,)4,3,2,1(=j j θ是各开环极点到0s 点向量的相角。
4-2根轨迹绘制的基本法则

0
0
0
0
0
同学们,头昏了吧?
j
j
j
0
j j 0 0
14
0
2015-1-28
4-2根轨迹绘制的基本法则
作业
• • • • 4 -1 4-3(1)(2) 4—4(1) 4-8(1)
2015-1-28
4-2根轨迹绘制的基本法则
15
4 3 2 * s 5 s 8 s 6 s k 0 2)渐近线。由于n m 4 ,故有四条渐近线, a 1.25 a 45 , 135 应用劳思判据
3)确定分离点。
1 0 i 1 d pi
n
s4 1 s3 5 s 2 34 / 5 s1 (204 25 K * ) / 34 s0 K*
R( s )
K * ( s 1) s( s 2)( s 3)
C ( s)
j
a (2k 1)180o / (3 1) 90o
a (0 2 3) (1) / (3 1) 2
(4)分离点(用试探法求解)
1 1 1 1 d 1 d d 2 d 3 d 2.47
5)利用模值条件,可得分离点的根轨迹增益
2 4 . 75 7 . 25 K d* i 1 16.37 |d z| 15 .25 i
| d p |
3
所以,当
2015-1-28
K * 16.37
系统输出产生振荡
4-2根轨迹绘制的基本法则 13
根轨迹示例
j
j j 0
j
j j
4-2根轨迹绘制的基本法则
12
例子4-5 P150
解:1) m=1,n=3, K * (s 20) G( s) z1=-20,p1=0,p2=p3=-12, 2 s ( s 24 s 144 ) 2)实轴上0--12 ,-12--20 必为根轨迹。 3)渐近线。n-m=2 故有2条渐近线. 180 12 12 (20) 90 2 2 2 1 2 1 4)确定分离点。 d d 12 d 20 试探法:d=-4.75
4-2 绘制根轨迹的基本法则.
6
证明:角度的简单证明
sK 无穷远处的一个闭环特征根
与有限零点和有限极点所成
角度相同,都设为
a a
a atga
相角条件
ma na (2k 1)
a
(2k 1)
mn
根轨迹对称于实轴,也可写为
(2k 1)
nm
交角有n-m个,交点只有一个
7
【例4.2.1】一个系统开环传递函数为
135
根轨迹的复平面部分是以 零点到分离点距离为半径 的圆周的一部分
Imaginary Axis
例4.2.3 2.5
2
1.5
1
135°
0.5
d=-3.414
p1=-1+j
0
z1=-2
-0.5
p2=-1-j
-1
-1.5
-2
-2.5
-4
-3
-2
-1
0
1
Real Axis
23
法则7:根轨迹与虚轴的交点
j
j 1
i 1
s z1 s z2 360 或0 s z1 s p1
s p1 s p2 360 或0
z1
p1
s p3 180 s z3 0
z3
z2
s
p3 0
s p2
s z2 p2
5
开环零点用○表示
一条根轨迹起于p1, 终止于z1
其他三条终止于无 穷远处
Imaginary Axis
=-1.67
p3=-1+j
0
p2=-4
z1=-1 p1=0 p4=-1-j
180根轨迹绘制法则

解:将开环零极点标注在s平面上。
j
由法则1,确定根轨迹起点和终点。
由法则2,确定有4条根轨迹分支。
由法则4,确定实轴上的根轨迹 [-∞,-2.5]、[-1.5,0] 。
由法则3,确定根轨迹有1条渐近线
-3 -2 -1 0
K1 K1 0
K1 0
m
1
n
1
j1 d z j i1 d pi
K1
分分离点离点
分离角: (2k 1) / l
K1
K1 0
K1
会合? 点? ?
K1 0
式中,zi , pj 分别为开环系统 的零点和极点; l 为在s平面上 相遇又立即分开的根轨迹的条 数,k 0,1, , l 1。
称为终值角,以 zi 标志。
根轨迹的
j
起始角 [s]
p1 p1
p3
0
p2
p2
根轨迹的j 终止角
p1
z1
p1
z1
z1
0
z2
z2 p2 z2源自p2j[s] p1
p1
[s]
0
p2 p2
出射角对(a)复极点,
(b入) 射角对复零点。
法则6:根轨迹起始角和终值角。
用试探法得d≈-2.3。
由法则6,确定起始角和终止角。
p3 (2k 1) (135o 90o 26.6o ) 71.6o p4 71.6o 本题无须确定终止角。
由法则7,确定根轨迹与虚轴的交点。
闭环特征方程为:s4 5s3 8s2 6s K* 0
绘制根轨迹图的规则

K *的表达式为
K*
j 1 m
(s zi )
iห้องสมุดไป่ตู้1
则在分离点处有
dK* 0 ds
分离点坐标d是以下方程的解。
m 1
n1
i1 d zi j1 d p j
在一般情况下,绘制多回路系统的根轨迹时,首先根据内反馈回路的开环传递 函数,绘制内反馈回路的根轨迹,并确定内反馈回路的极点分布;然后由内反馈回 路的零、极点和内反馈回路外的零、极点构成整个多回路系统的开环零、极点;再 按照单回路根轨迹的基本规则,绘制出系统总的根轨迹。但这样绘制出来的根轨迹 只能确定多回路系统极点的分布,而多回路系统的零点还需要根据系统的闭环传递 函数来确定。
(z j
zi )
l 1
( zi
pl
)
,为开环零点(除
zi 外)和开环极
(i j)
点往零点 引zi 出向量的相角净值。
规则9 根轨迹的分离点。两条或两条以上的根轨迹分支,在s平 面上某处相遇后又分开的点,称为根轨迹的分离点(或会合点)。 可见,分离点就是特征方程出现重根之处。重根的重数就是会合到 (或离开)该分离点的根轨迹分支的数目。
坐标及相应的 K值* 可由劳斯判据求得,也可在特征方程中令 s j,然
后使特征方程的实部和虚部分别等于零而求得。根轨迹与虚轴相交,表明系 统在相应 K值* 下处于临界稳定状态。此处的根轨迹增益 K*称为临界根轨 迹增益。
【例 3-2】
设系统的开环传递函数为
Gk
(s)
s(s
K* 1)(s
2)
,求根轨迹与
时的根轨迹方程则有
m
K* (s zi )
i 1
≈
K*
n