飞机前起落架转弯系统性能分析
飞机起落架刹车系统工作原理和性能分析【毕业作品】
飞机起落架刹车系统⼯作原理和性能分析【毕业作品】BI YE SHE JI(20 届)飞机起落架刹车系统⼯作原理与性能分析所在学院专业班级飞机结构修理学⽣姓名学号指导教师职称完成⽇期年⽉摘要飞机的刹车系统是保证飞机安全快速可靠地着陆的重要部件,在飞机着陆地⾯滑跑阶段通过刹车装置将飞机的动能转化为热能,减⼩飞机着陆滑跑的距离,通过飞机刹车系统的防滑刹车功能是飞机在着陆滑跑时在不同的路⾯上都能提供最⼤的刹车⼒同时保证飞机滑跑时的航向稳定性。
本⽂重点论述了飞机刹车盘的⼯作原理,及刹车盘常见故障和维修排除⽅法,以及⼀些常见问题的预防和维护⽅法。
关键词:飞机刹车盘,刹车效率,刹车材料ABSTRACTAircraft braking system is an important component that is to ensure the safety, quickly and reliably of aircraft landing. The brakes of aircraft convert kinetic energy of aircraft into heat energy and reduce the distance of the landing roll. The features of anti-skid braking system can provide the largest braking force and ensure stability of the course in the landing roll on the different road. .I n this paper discusses the brake and anti-skid braking control system. And some common methods of prevention and maintenance will be introduced as well.Key Words: aircraft brakes,braking efficiency, brake materials⽬录第1章绪论 (1)1.1 概述 (1)第2章刹车减速原理与最⾼刹车效率 (3)第3章 .液压动⼒刹车系统主要部件 (4)3.1 动⼒刹车计量阀 (4)3.2 刹车减压器(流量放⼤器) (4)3.3刹车装置 (5)3.3.1单圆盘式 (5)3.3.2多圆盘式刹车装置 (6)第4章液压动⼒刹车系统 (8)4.1 ⼈⼯刹车 (8)4.2⾃动刹车 (8)4.3 停留刹车 (8)4.4 空中刹车 (8)4.5防滞刹车系统 (9)4.5.1惯性防滞刹车系统 (9)4.6电⼦式防滞刹车系统 (10)4.7电⼦式防滞系统的组成 (11)4.7.1 轮速传感器 (11)4.7.2 防滞控制器 (11)第5章刹车温度探测和冷却系统 (12)5.1刹车温度探测 (12)5.2电动刹车系统 (13)第6章总结与展望 (15)6.1 结论 (15)6.2 展望 (15)参考⽂献 (16)第1章绪论1.1 概述飞机的刹车系统是飞⾏器着陆制动的重要了系统,在飞机地⾯着陆滑跑过程中吸收飞机滑跑的动能,是飞机滑跑的速度快速降低,从⽽缩短飞机的制动距离;在飞机着陆后确保飞机可以实现驻停;在飞机起飞过程中遇突发情况可以实现飞机的起飞中⽌刹车;在飞机起飞起落架收起后可以刹停机轮。
论Cessna172R型飞机前起落架原理及故障
论Cessna172R型飞机前起落架原理及故障1 前起落架结构组成及原理功能Cessna172R型飞机有一个可实现转弯功能的前起落架结构,与方向舵脚蹬扭力管连接进行地面操纵。
其主要部件包括缓冲支柱、扭力连杆(防扭臂)、转弯系统、减摆器、机轮等组件。
缓冲支柱由上部和下部缸筒构成,包含液压油和高压氮气,飞机着陆时通过上、下缸筒的相对运动来压缩气体和限流液压油的运动来吸收能量,起到缓冲减震的功能。
防扭臂提供减震支柱上部和下部部件的机械连接,实现前机轮与机身的定中性以及传递转弯作动时的作用力和运动。
前起落架转弯可通过方向舵脚蹬进行操纵,弹簧转弯操纵杆连接前起落架转弯臂组件与方向舵脚蹬扭力管,转弯范围相对中立位置每边大约10°,结合刹车使用,可获得向左、右最大30°偏转角。
减摆器活塞杆连接于上部支柱低端支板,减摆器壳体连接于转弯臂组件上,滑行时阻止前机轮受到冲击而产生摆震现象。
2 定中性分析机轮、轮叉下部防扭臂、上部防扭臂、转弯臂组件为机械连接,在支柱轴线的转动副受到一致限制。
飞机起飞后、着陆前,机轮离开地面时,在支柱内部气体压力的作用下,支柱的内筒沿外筒轴线移动、伸长,从而使上、下部防扭臂运动张开,上部防扭臂绕其上部安装螺栓转动,直到上部防扭臂止动凸耳紧贴在支柱外筒下部的定中面上,限制了上部防扭臂绕支柱轴线的转动副,限制转弯系统组件处于机身纵向中线位,实现前起落架机轮的定中。
3 转弯原理弹簧转弯操纵杆连接前起落架转弯臂组件与方向舵脚蹬扭力管。
当操纵方向舵脚蹬时,力与运动通过方向舵扭力管传递到弹簧转弯操纵杆上,弹簧转弯操纵杆移动带动转弯臂组件绕支柱轴线旋转,通过上、下防扭臂将力与运动传递到轮叉上,克服机轮与地面摩擦力的作用,实现机轮的转弯偏转。
飞机在地面滑行正常蹬舵转弯时,作动一侧的动作筒在脚蹬机构的作用下产生拉力,使转弯杆壳体运动,压缩内部弹簧,在克服弹簧弹性变形的情况下,弹簧同时作用于拉杆,拉杆作用于转弯臂,实现机轮转弯功能。
飞机起落架悬挂系统动力学特性分析

飞机起落架悬挂系统动力学特性分析飞机起落架是飞机的重要组成部分,其主要作用是支持飞机在地面起落过程中的安全和平稳。
悬挂系统作为起落架的关键组件之一,对飞机的动力学特性有着重要的影响。
本文将对飞机起落架悬挂系统的动力学特性进行分析和探讨。
首先,我们来介绍一下飞机起落架悬挂系统的主要组成部分。
悬挂系统主要包括悬挂支架、油管、液压缸、减振器等多个部件。
其中,悬挂支架是飞机起落架的主体部分,负责连接起落架与飞机机身,并通过液压缸实现起落架的收放。
减振器则主要起到减震作用,确保飞机在起降过程中的稳定性。
在飞机起降过程中,悬挂系统的动力学特性显得尤为重要。
首先是起飞时的抬轮过程。
当飞机加速到一定速度后,飞行员会操作起落架的收放按钮或拉动手柄,使起落架抬升。
在这个过程中,悬挂系统需要足够的刚度和强度来支撑飞机的重量。
同时,为了保证起落架平稳地抬升,悬挂系统的减振器也需要具备一定的减震性能,以增加飞机的稳定性。
接下来是降落时的起落架展开过程。
当飞机降落时,飞行员会将起落架展开,准备接触地面。
此时,悬挂系统需要具备一定的弹性来吸收降落冲击力,减小对飞机结构的冲击,从而保护飞机不受损坏。
悬挂系统的减振器在这个过程中起到了重要的作用,通过减震和缓冲的方式,降低对飞机和乘客的冲击,确保起落过程的平稳进行。
飞机起落架悬挂系统的动力学特性还与飞机的几何参数和弹性特性密切相关。
例如,飞机的重量分布、机身硬度、减振器的刚度等都会对悬挂系统的动力学行为产生影响。
这些参数的变化将直接影响到起落架在起降过程中的振动特性和减震效果。
此外,飞机起落架的悬挂系统还需要考虑外界环境因素的影响。
例如,起飞和降落过程中的风速、地面条件、温度等都会对悬挂系统的动力学特性产生一定的影响。
同时,不同机型的飞机起落架悬挂系统也存在差异,其动力学特性也有所不同。
因此,在实际应用中需要对不同条件下的飞机起落架悬挂系统进行研究和优化设计,以满足各种工况下的要求。
浅析空客A330前起落架转弯超限警告系统
浅析空客A330前起落架转弯超限警告系统摘要:本文简要叙述了空客A330飞机前起落架转弯超限警告系统的作用,系统的部件构成,运作的原理以及整套系统的测试方法。
关键词:接近电门;继电器;转弯超限电子控制盒;超控电门引言在飞机日常维护工作中,经常会用到牵引车牵引飞机,当牵引角度过大时,可能会对飞机前起落架及机身结构造成损害。
为了提醒飞机牵引转弯角度超过限制,A330飞机引入了这套比较有特色的前起落架转弯超限警告系统,用来提示前起落架转弯角度过大,作为对飞机的一种保护。
1.原理分析A330前起落架转弯超限警告系统包括2个用胶层密封的接近传感器1G H 和2GH,以及配套的1个目标块,转弯超限电子控制盒8GH,超控电门3GH。
接近传感器1GH、2GH 安装在前起落架减震支柱上部,分别在前起落架的左右两侧,目标块安装在前起落架的前侧,随着前起落架的转动一同旋转,超控电门3G H 安装在驾驶舱顶板。
当前起落架转弯角度达到限制值时(A330为93°),目标块就会靠近接近传感器1G H 或者2G H,触发转弯超限的逻辑,转弯超限电子控制盒8G H 上的红色指示灯和超控电门3G H 上的FA U LT灯会亮起。
当前起落架恢复到正常转弯角度后,按压超控电门3G H,使转弯超限电子控制盒8G H 上的红色指示灯和超控电门3G H 上的FA U LT灯熄灭。
灯光的重置只能由按压超控电门3G H 来实现,为了防止非指令的灯光重置,超控电门3G H上加装了一个打有铜保险丝的保护盖。
在一般情况下,通过按压转弯超限电子控制盒上的TEST按钮,可使红色指示灯亮起,用来验证转弯超限警告系统运作是否正常。
前起落架转弯超限警告系统的供电电源有直流汇流条105PP(28V D C),热汇流条701PP(28VDC)和转弯超限电子控制盒8GH 的B插头接通的外部牵引电源。
飞机正常构型下,直流汇流条105PP提供电流通过跳开关K 70(6G H -前起落架转弯超限指示),流经前起落架转弯超限供电转换继电器9G H 的电磁线圈,使继电器吸合,使电流经过继电器9G H,同时隔离701PP的来源电流。
065-飞机前起落架转弯系统性能分析
飞机前起落架转弯系统性能分析张丹丹南京航空航天大学,南京 210000摘要:飞机前轮操纵技术是飞机地面操纵的核心。
作为起落架设计中的重要组成部分,前轮转弯操纵系统的结构及性能对起落架地面滑跑及操纵稳定性存在较大影响。
特别地,转弯机构能否实现大角度转弯,满足大转弯力矩的要求,对飞机起落架的滑跑转弯性能有重要影响。
本文某型飞机为研究对象,针对双作动筒式前轮转弯系统和齿轮齿条式前轮转弯系统的前轮转弯机构和液压控制系统两部分,在LMS b AMESim中建立了双作动筒式和齿轮齿条式前轮转弯操纵系统的液压系统模型。
然后基于LMS b Motion软件平台分别建立了含有双作动筒式前轮转弯机构和齿轮齿条式前轮转弯机构的前起落架动力学模型,并与AMESim中建立的两种转弯系统的液压控制模型进行联合仿真,分析不同工况下飞机转弯操纵的性能。
关键词:民机起落架、转弯系统、Virtual Lab Motion、AMESim、联合仿真0 前言作为飞机设计的基础领域之一,起落架的设计结果对飞机性能的影响是非常大的。
飞机的起飞着陆过程是飞机安全事故的多发阶段,因此飞机具有良好的地面操纵性就显得尤为重要。
对于大型飞机,起落架多采用前三点式布局。
该布局常用的转弯操纵技术有以下三种:发动机推力差动、前轮操纵以及差动刹车技术。
其中,发动机差动对飞机地面机动和方向难以达到精准控制,而差动刹车对机轮磨损严重,现代飞机多采用前轮操纵的方式来实现飞机的转向以及地面机动。
前轮转弯系统不仅能对飞机运动方向进行操纵,当飞机滑跑过程中遇到扰动或侧风、单侧轮胎爆破漏气等原因导致的飞机前轮摆振或偏离预定航向时,前轮转弯操纵系统能及时响应,消除前轮摆振并对航向进行纠正。
液压传动是飞机各操纵系统动力的主要来源。
由于技术水平的限制,国内早期军用飞机的前轮转弯系统大多采用的是机械—液压系统。
此类系统通过机械机构(手轮或脚蹬)传递操纵指令控制液压助力器,以此提供转弯力矩驱动前轮转弯。
空客A320s飞机前轮转弯系统排故经验总结

空客A320s飞机前轮转弯系统排故经验总结摘要:经济在快速的发展,社会在不断的进步,我国的科学技术也在不断的发展进步,本文以空客A320s飞机在滑行中发生方向偏移故障为例,通过对前轮转弯系统原理的介绍,结合维护工作中的实际经验,对此类故障进行分析总结并提出排故建议。
关键词:前轮转弯;故障;原理;排故建议飞机前轮转弯系统是实现飞机地面操纵运动的重要组成部分,其各种性能和指标对飞机整体地面操作的稳定性、地面机动性等都有很重要的影响。
因此,针对飞机前轮转弯系统及其控制律的研究尤为关键。
国内相关资料对前轮转弯系统有较深入的研究,同时提出了各种控制律来保证系统的各种性能指标,有关资料结合飞机地面运动将前轮转弯角速度最大允许值作为前轮转弯系统指标来保证转弯稳定性。
由于传统的执行机构多为线性机构,仅需选取合适额定流量的伺服阀保证流量与转弯角速度匹配,无须对角速度进行闭环控制。
而目前应用较普遍的对称液压缸为典型非线性机构,存在转弯临界角,若不采用合适的控制方法,会引起角速度脉冲峰值,恶化系统性能。
因此,需引入针对角速度控制的具体方法。
传统的PID控制方法在实际的各种系统控制中有着广泛的应用,但由于前轮转弯系统各非线性环节的影响及临界角的存在,传统PID并不能产生较好的效果,且PID参数调节过程繁琐困难。
该文给出一种多门限PID控制算法,结果表明,该控制方法即能保证转弯角速度不超过允许值,同时,也未对系统的其他性能指标造成明显影响。
1 前轮转弯基本工作原理转弯手柄将转弯信号传送给刹车与转弯控制组件(BSCU),脚蹬和方向舵配平控制器的偏转信号通过升降舵副翼计算机(ELAC)传送给BSCU,BSCU通过控制伺服控制器(6GC)内液压油的流向和流速,将从驾驶舱来的转弯指令电信号转换成液压信号,伺服控制器与转弯作动筒的两端液压腔相连,液压油的流向和流速控制着转弯作动筒内活塞移动的方向和速度,活塞杆带有齿轮,与前起落架上旋转柱(rotatingtube)外侧的齿轮相连,可以将转弯作动筒内活塞的直线运动转变成旋转柱的圆周运动,旋转柱通过扭力臂(torquelink)与前轮轴相连,旋转柱的左右转动带动着前轮的左右偏转,实现转弯。
3-4 前起落架特点与飞机地面转弯
型式
§2-4 前起落架与地面转弯系统 8/22
机械传动式前轮转弯Biblioteka 统构成
刹车脚蹬 传动杆 扇形轮 方向舵钢索 固定支架 转弯操纵摇臂组 件 摇臂
§2-4 前起落架与地面转弯系统 9/22
机械传动式前轮转弯系统
工作过程
蹬舵信号既传动钢 索9使方向舵偏转, 同时经拉杆带动前 轮转弯操纵摇臂组 件,经转弯摇臂带 动前起落架支柱及 前轮偏转; 飞机离地收上起落 架时,支柱带动转 弯摇臂与转弯操纵 摇臂组件脱开,空 中蹬舵前轮不偏转。
减摆器类型
活塞式、旋板式与液压传动管路的节流减摆装置。
§2-4 前起落架与地面转弯系统 19/22
前轮摆振
活塞式减摆器
前轮摆振时,经减震支柱内筒上的凸轮作动摇臂转动, 摇臂另一端与减摆器活塞杆相连,活塞左右移动迫使油 液来回流过节流孔消耗能量。
旋板减摆器
前轮摆振时,带动旋板来回转动,迫使油液来回流过小 孔产生阻尼而消耗能量。
§2-4 前起落架与地面转弯系统 20/22
飞机地面转弯操纵
前轮转弯系统的使用
机械传动式前轮转弯系统
由方向舵脚蹬控制,无需特别控制。
液压传动式前轮转弯系统
脚操纵偏角小,用于高速滑跑修正方向; 手操纵偏角大,用于低速滑行转弯,为了减小 支柱的扭矩和机轮的磨损,禁止操纵飞机绕一 边主轮原地转弯,尽量大半径转弯; 手操纵可超控脚操纵; 飞机离地,前起落架支柱伸长,前轮转弯液压 断开,由中立机构使前轮回中立。
§2-4 前起落架与地面转弯系统 14/22
737-NG_前轮转弯系统_液压

综合手柄输入
图例
压力油 回油 机械
有效性 YE201
拖行关 断活门
补偿器
左
右
计量活门
左转弯 作动筒
拖行手柄
右转弯 作动筒
旁通 活门
拖行手柄
转弯计量活门组 件
左旋转活门
右旋转活门
减振支持内筒
前轮转弯系统—功能介绍—液压
32—51—00
轮转弯系统 — 功能介绍 — 电气
旋转作动筒
当空/地继电器接通时,旋转作动筒移到接通位。来自接近电门 电子组件(PSEU)的前起落架在地面信号接通空/地继电器。当前起 落架达到没压缩位置时,PSEU 切断前轮在地面上的信号,在此后, 空/地继电器移到空中位 5 秒,这样旋转作动筒接通并移到脱开位置。
— 从最后位置行转换位置数据 — 从基准机场行转换位置数据 — 用 CDU 键盘输入位置数据
也可以从 CDU 的位置基准页转换 GPS 当前位置。
最后位置转换
从 CDU 的最后位置行将位置数据转换到 APIRU 上:
— 按压行选择键(LSK)1R,位置数据移到暂存区。 — 按压 LSK 4R,位置数据从暂存区移到设定的 IRS POS 栏。
34—21—00—039 Rev 1 08/13/96
34—21—00—039 Rev 1 08/13/96
键盘输入位置
ADIRS — 暂存区输入当前位置
34—21—00—040 Rev 1 08/13/96
ADIRS — 从 ISDU 输入当前位置
从 ISDU 输入当前位置
可用 ISDU 键盘为 ADIRU 输入当前位置数据。显示选择器 (DSPL SEL)在测试位不能用。可以先输入纬度或经度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Landing Cases [J]. Journal of Aircraft, 1993, 31(2): 446-449. [3] P. D. Khapane. Simulation of asymmetric landing and typical ground maneuvers for large
transport aircraft [J]. Aerospace Science and Technology, 2003,7 [4] P. D. Khapane. Gear walk instability studies using flexible multibody dynamics simulation
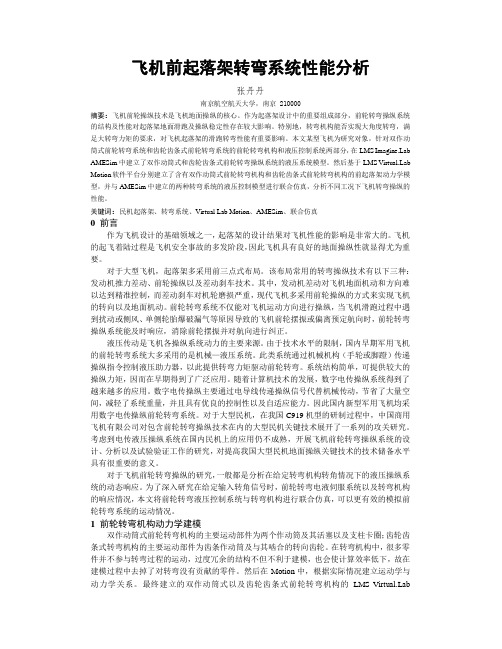
图 4 三种工况两个作动筒活塞的位移—时间曲线
从图中可以看出,随着前轮向左转角的增大,左侧作动筒的位移一直增大,而右侧作动 筒位移先减小后增大,这与第二章中对转弯状态的分析,左转时右侧作动筒先到达死点后换 向的情况一致。可以看出,由于三种工况的最大转弯角度相同,且转弯速率相差不大,故作 动筒活塞的位移—时间曲线基本相同。且通过联合仿真,验证了该双作动筒式前轮转弯电液 伺服控制系统的转弯跟随性良好,且运动过程中速度平稳,动态性能良好。 2.2 齿轮齿条式前轮转弯操纵系统
2010. [10]马大卫. 大型民机前轮双作动筒式转弯机构设计与操稳特性分析 [D]. 南京: 南京航空
航天大学, 2012. [11]徐方舟. 齿轮齿条式前轮转弯机构设计与分析技术研究 [D]. 南京: 南京航空航天大学,
2011. [12]高泽迥, 黄振威, 于俊虎. 飞机设计手册第 14 分册:起飞着陆系统设计 [M]. 北京: 航
当飞机前轮不需要转弯操纵时,前轮转弯系统切换至减摆状态。在此状态下,飞机转弯 操纵系统不工作,由飞机的前轮稳定距保持飞机在地面的滑跑稳定性。如出现颠簸及冲击等 因素造成前轮摆振现象,则减摆回路中的减摆阀会通过自身阻尼降低其振动幅值使其重新回 到稳定滑跑状态。
减摆状态起减摆作用的元件只有减摆阀,其系统的性能与采用双作动筒式或是齿轮齿条 式转弯机构关系不大。因此以双作动筒式前轮转弯机构为例,进行减摆状态的联合仿真,齿 轮齿条式前轮转弯机构不再赘述。
2853.428
左侧回路开启,右侧回路关闭
7579.145
两回填阀均开启
4125.592
两回填阀均开启
12332.457
两回填阀均关闭
从以上工况的仿真分析中可以发现,阻尼力矩随着摆动的振幅和频率的增大而增加,随 着阻尼孔直径的增加而减小。
3 结论
本文首先建立的双作动筒及齿轮齿条式前轮转弯电液伺服控制系统模型附,然后在 LMS b Motion 中建立了两种转弯机构的动力学模型,并与电液伺服控制系统模型 进行了联合仿真,完成了多种工况的转弯状态以及减摆状态的仿真及对比分析,验证了两种 转弯操纵系统的转弯及减摆的性能,均可满足现代大型民机前轮操纵转弯系统的设计要求。
对于飞机前轮转弯操纵的研究,一般都是分析在给定转弯机构转角情况下的液压操纵系 统的动态响应。为了深入研究在给定输入转角信号时,前轮转弯电液伺服系统以及转弯机构 的响应情况,本文将前轮转弯液压控制系统与转弯机构进行联合仿真,可以更有效的模拟前 轮转弯系统的运动情况。
1 前轮转弯机构动力学建模
双作动筒式前轮转弯机构的主要运动部件为两个作动筒及其活塞以及支柱卡圈;齿轮齿 条式转弯机构的主要运动部件为齿条作动筒及与其啮合的转向齿轮。在转弯机构中,很多零 件并不参与转弯过程的运动,过度冗余的结构不但不利于建模,也会使计算效率低下,故在 建模过程中去掉了对转弯没有贡献的零件。然后在 Motion 中,根据实际情况建立运动学与 动力学关系。最终建立的双作动筒式以及齿轮齿条式前轮转弯机构的 LMS b
仿真按照表 2 所列工况进行:
仿真工况
工况 1 工况 2 工况 3 工况 4
仿真结果如表 3 所示:
表 2 摆振阻尼仿真分析工况
阻尼孔直径 (mm)
4
5
频率(Hz)
2 5 5 5
工况 1 工况 2 工况 3 工况 4
表 3 摆振阻尼仿真结果
最大阻尼力矩(Nm)
回填阀开启状态
关键词:民机起落架、转弯系统、Virtual Lab Motion、AMESim、联合仿真
0 前言
作为飞机设计的基础领域之一,起落架的设计结果对飞机性能的影响是非常大的。飞机 的起飞着陆过程是飞机安全事故的多发阶段,因此飞机具有良好的地面操纵性就显得尤为重 要。
对于大型飞机,起落架多采用前三点式布局。该布局常用的转弯操纵技术有以下三种: 发动机推力差动、前轮操纵以及差动刹车技术。其中,发动机差动对飞机地面机动和方向难 以达到精准控制,而差动刹车对机轮磨损严重,现代飞机多采用前轮操纵的方式来实现飞机 的转向以及地面机动。前轮转弯系统不仅能对飞机运动方向进行操纵,当飞机滑跑过程中遇 到扰动或侧风、单侧轮胎爆破漏气等原因导致的飞机前轮摆振或偏离预定航向时,前轮转弯 操纵系统能及时响应,消除前轮摆振并对航向进行纠正。
Motion 模型,如图 1 和图 2 所示。
图 1 双作动筒式前轮转弯机构动力学模型 图 2 齿轮齿条式前轮转弯机构动力学模型 为了仿真前轮转弯过程,采用第三章所建立的电液伺服控制系统对机构进行控制,动力 学模型中不需要附加任何驱动,同时通过添加输入、输出控制节点来设置数据通信端口,并 将 b 的求解器设置为“AMESIM COUPLED”,计算后生成“#.vlcosim”文件。在 b 中将“#.vlcosim”文件导入,并连接对应的控制点,即完成了仿真分析的连接工 作。转弯过程的负载由卡圈(齿轮)与支柱之间的旋转副上添加的与转动方向相反的力矩模 拟。
联合仿真模式下双作动筒式前轮转弯系统的电液伺服控制系统模型,如图 3 所示。
图 3 联合仿真中的双作动筒式电液伺服控制系统模型 仿真采用三种工况,分别对最大转弯角度为 75°的情况下负载分别为 4000Nm(工况
1)、6000Nm(工况 2)、7000Nm(工况 3)三种工况进行了仿真。下面将对三种工况结果进 行对比分析。
飞机前起落架转弯系统性能分析
张丹丹
南京航空航天大学,南京 210000
摘要:飞机前轮操纵技术是飞机地面操纵的核心。作为起落架设计中的重要组成部分,前轮转弯操纵系统
的结构及性能对起落架地面滑跑及操纵稳定性存在较大影响。特别地,转弯机构能否实现大角度转弯,满 足大转弯力矩的要求,对飞机起落架的滑跑转弯性能有重要影响。本文某型飞机为研究对象,针对双作动 筒式前轮转弯系统和齿轮齿条式前轮转弯系统的前轮转弯机构和液压控制系统两部分,在 LMS b AMESim 中建立了双作动筒式和齿轮齿条式前轮转弯操纵系统的液压系统模型。然后基于 LMS b Motion 软件平台分别建立了含有双作动筒式前轮转弯机构和齿轮齿条式前轮转弯机构的前起落架动力学模 型,并与 AMESim 中建立的两种转弯系统的液压控制模型进行联合仿真,分析不同工况下飞机转弯操纵的 性能。
空工业出版社, 2002.
methods in SIMPACK [J]. Aerospace Science and Technology, 2006, 10: 19-25.
[5] 王孝英, 诸德培. 飞机操纵前轮转弯运动的数学模型及数值仿真 X [J]. 应用动力学报, 1997, 14(4): 46-51.
[6] 孙泽鹏. 多轮起落架飞机地面操纵特性分析 [D]. 南京: 南京航空航天大学, 2009. [7] 哈晓春. 数字式前轮转弯防摆控制系统应用分析 [J]. 洪都科技, 2006, 3: 9-19. [8] 钱小妹. 飞机操纵前轮转弯特性仿真研究 [D]. 南京: 南京航空航天大学, 2008. [9] 米滨. 大型民机双作动筒式前轮转弯系统设计与分析 [D]. 南京: 南京航空航天大学,
液压传动是飞机各操纵系统动力的主要来源。由于技术水平的限制,国内早期军用飞机 的前轮转弯系统大多采用的是机械—液压系统。此类系统通过机械机构(手轮或脚蹬)传递 操纵指令控制液压助力器,以此提供转弯力矩驱动前轮转弯。系统结构简单,可提供较大的 操纵力矩,因而在早期得到了广泛应用。随着计算机技术的发展,数字电传操纵系统得到了 越来越多的应用。数字电传操纵主要通过电导线传递操纵信号代替机械传动,节省了大量空 间,减轻了系统重量,并且具有优良的控制性以及自适应能力。因此国内新型军用飞机均采 用数字电传操纵前轮转弯系统。对于大型民机,在我国 C919 机型的研制过程中,中国商用 飞机有限公司对包含前轮转弯操纵技术在内的大型民机关键技术展开了一系列的攻关研究。 考虑到电传液压操纵系统在国内民机上的应用仍不成熟,开展飞机前轮转弯操纵系统的设 计、分析以及试验验证工作的研究,对提高我国大型民机地面操纵关键技术的技术储备水平 具有很重要的意义。
2 前轮转弯系统联合仿真
根据前面的设置,完成了动力学模型与液压控制模型之间连接以及数据传输,本节通过 电液伺服控制系统模型中的操纵信号,为整个系统输入转弯信号,控制系统进行前轮转弯。 从而获得转弯机构的转角数据、作动筒腔室的压力、作动筒活塞的位移、速度等结果,以此 结果对两种前轮转弯系统的功能和性能进行验证分析。 2.1 双作动筒式前轮转弯操纵系统
图 5 联合仿真中的齿轮齿条式电液伺服控制系统模型
图 6 工况 1 作动筒活塞的位移—时间 曲线
图 7 工况 2 作动筒活塞的位移—时间 曲线
图 8 工况 3 作动筒活塞的位移—时间 曲线
图 9 工况 4 作动筒活塞的位移—时间 曲线
图 6-9 为 4 种工况下的齿条作动筒活塞的位移-时间变化曲线,从图中可以看出,各工 况下作动筒活塞的位移与输入的转弯角度随时间的变化关系对应良好且运动平稳。且通过前 轮转弯系统联合仿真,验证了该齿轮齿条式前轮转弯电液伺服控制系统的转弯跟随性良好, 且运动过程中速度平稳,动态性能良好。 2.3 减摆状态