线性系统理论基础实验三
实验报告
课程线性系统理论基础实验日期2016 年 5 月25 日
专业班级姓名学号同组人
实验名称状态反馈极点配置方法的研究评分
批阅教师签字
一、实验目的
1.掌握状态反馈系统的极点配置;
2.研究不同配置对系统动态特性的影响。
二、实验环境
MATLAB6.5
三、实验内容、源程序代码、实验数据及结果分析
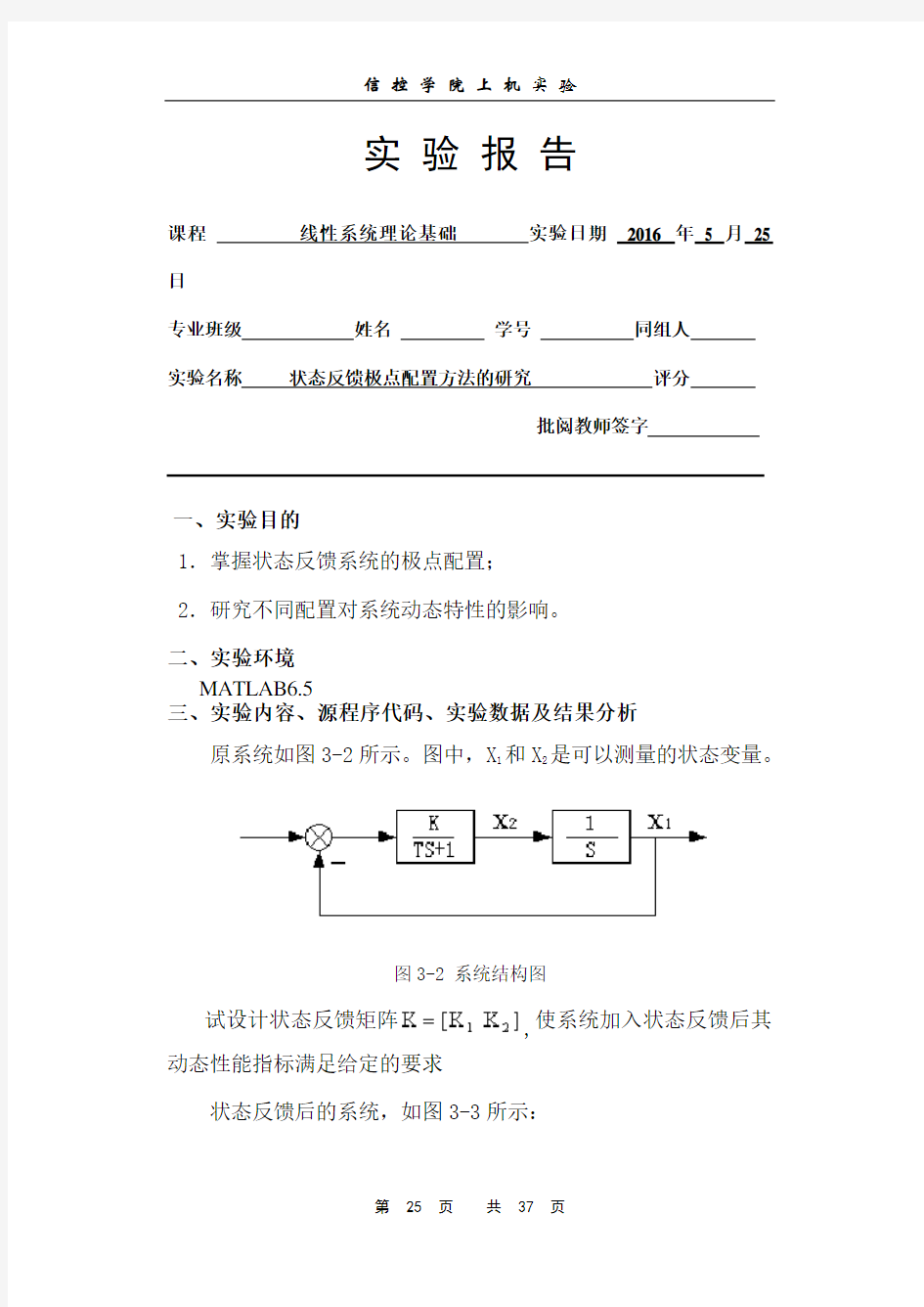
原系统如图3-2所示。图中,X
1和X
2
是可以测量的状态变量。
图3-2 系统结构图
试设计状态反馈矩阵,使系统加入状态反馈后其动态性能指标满足给定的要求
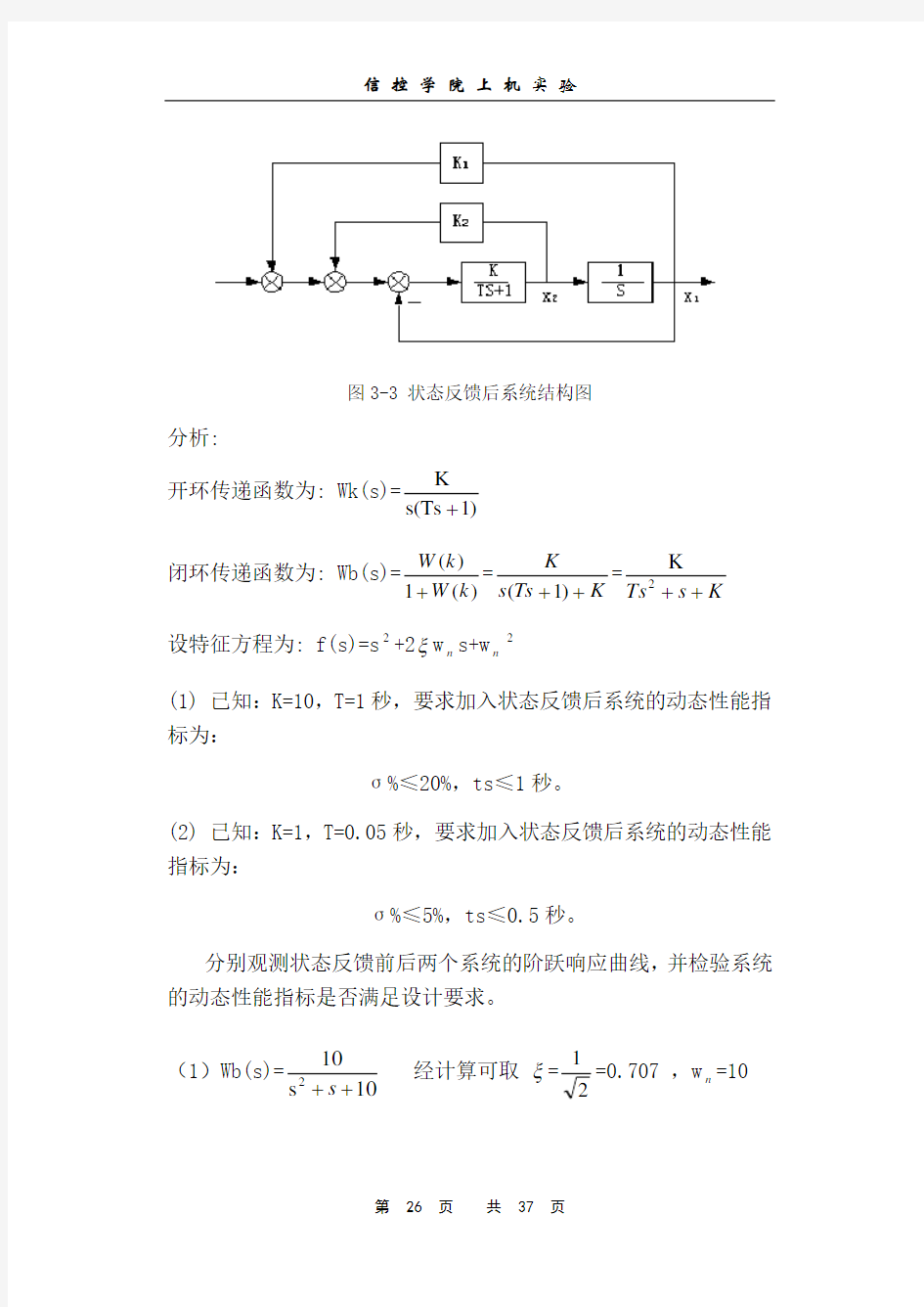
状态反馈后的系统,如图3-3所示:
图3-3 状态反馈后系统结构图
分析:
开环传递函数为: Wk(s)=
1)
s(Ts K
+
闭环传递函数为: Wb(s)=
)(1)(k W k W +=K Ts s K ++)1(=K
s Ts ++2K
设特征方程为: f(s)=s 2+2ξw n s+w n 2
(1) 已知:K=10,T=1秒,要求加入状态反馈后系统的动态性能指标为:
σ%≤20%,ts≤1秒。
(2) 已知:K=1,T=0.05秒,要求加入状态反馈后系统的动态性能指标为:
σ%≤5%,ts≤0.5秒。
分别观测状态反馈前后两个系统的阶跃响应曲线,并检验系统的动态性能指标是否满足设计要求。 (1)Wb(s)=10s 10
2
++s 经计算可取 ξ=2
1=0.707 ,w n =10
则加入状态反馈后的特征方程为:f(s)=s+14.14s+10
其特征根为:-7.07sqrt(-50)
则状态反馈矩阵:Ky=[k1 k2]=[10-100 1-14.14]=[-90 -13.14] 程序如下:
num=10;den=[1 1 10];
sys=tf(num,den);
figure(1);
step(sys);
grid on;
title('原系统的阶跃响应曲线');
denf=[1 14.14 100];
k1=den(:,3)-denf(:,3);
k2=den(:,2)-denf(:,2);
disp('系统的状态反馈增益矩阵K:')
Ky=[k1 k2]
[A,B,C,D]=tf2ss(num,den);
disp('原系统的极点为:');
p=eig(A)'
P=[-7.07-sqrt(-50);-7.07+sqrt(-50)];
K=place(A,B,P)
disp('配置后系统的极点为:')
p=eig(A-B*K)'
disp('配置后的闭环系统为:')
sys=ss(A-B*K,B,C,D)
figure(2);
step(sys/dcgain(sys))
grid on;
title('加入反馈后系统的阶跃响应曲线');
[y,t]=step(sys);
C=dcgain(sys);
[Y,K]=max(y);
Tp=t(K)
percentover=(Y-C)/C
i=length(t);
while(y(i)>0.98*C)&(y(i)<1.02*C)
i=i-1;
end
Ts=t(i)
运行结果:
系统的状态反馈增益矩阵Ky:
Ky =
-90.0000 -13.1400
原系统的极点为:
p =
-0.5000 - 3.1225i -0.5000 + 3.1225i K =
13.1400 89.9849
配置后系统的极点为:
p =
-7.0700 - 7.0711i -7.0700 + 7.0711i 配置后的闭环系统为:
a =
x1 x2
x1 -14.14 -99.98
x2 1 0
b =
u1
x1 1
x2 0
c =
x1 x2
y1 0 10
d =
u1
y1 0
Continuous-time model.
Tp =
0.4452
percentover =
0.0432
Ts =
0.5936
可见加入状态反馈后,系统超调量减小,且系统平滑过渡到稳态,从而系统性能变好。
(2)Wb(s)=
105.012++s s =20
2020
2++s s
经计算可取 ξ=
2
1=0.707 ,w n =10
则加入状态反馈后的特征方程为:f(s)=s 2+14.14s+10 其特征根为:-7.07-
+sqrt(-50)
则状态反馈矩阵为: K=[k 1 k 2]=[20-100 20-14.14]=[-80 5.86]
程序如下:
num=20;den=[1 20 20]; sys=tf(num,den); figure(1); step(sys); grid on;
title('原系统的阶跃响应曲线'); denf=[1 14.14 100]; k1=den(:,3)-denf(:,3); k2=den(:,2)-denf(:,2);
disp('系统的状态反馈增益矩阵Ky:') Ky=[k1 k2]
[A,B,C,D]=tf2ss(num,den); disp('原系统的极点为:'); p=eig(A)'
P=[-7.07-sqrt(-50);-7.07+sqrt(-50)]; K=place(A,B,P)
disp('配置后系统的极点为:') p=eig(A-B*K)'
disp('配置后的闭环系统为:') sys=ss(A-B*K,B,C,D) figure(2);
step(sys/dcgain(sys)) grid on;
title('加入反馈后系统的阶跃响应曲线'); [y,t]=step(sys); C=dcgain(sys); [Y,K]=max(y); Tp=t(K)
percentover=(Y-C)/C
i=length(t);
while(y(i)>0.98*C)&(y(i)<1.02*C)
i=i-1;
end
Ts=t(i)
运行结果:
系统的状态反馈增益矩阵Ky:
Ky =
-80.0000 5.8600
原系统的极点为:
p =
-18.9443 -1.0557
K =
-5.8600 79.9849
配置后系统的极点为:
p =
-7.0700 - 7.0711i -7.0700 + 7.0711i 配置后的闭环系统为:
a =
x1 x2
x1 -14.14 -99.98
x2 1 0
b =
u1
x1 1
x2 0
c =
x1 x2
y1 0 20
d =
u1
y1 0
Continuous-time model.
Tp =
0.4452
percentover =
-----WORD格式--可编辑--专业资料-----
0.0432
Ts =
0.5936
可见加入状态反馈后,系统由不稳定到稳定,系统性能变好。
线性系统理论Matlab实践仿真报告
线性系统理论Matlab实验报告 1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具 有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。 (1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控; 判断能控程序设计如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; Qc=ctrb(A,B) Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 Rc=rank(Qc) Rc =2 Qc = 0.0500 1.0000 -0.0400 -0.8000 0.0010 0 -0.0010 -0.0200 得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。 (2)求取状态反馈器中的K,设的期望特征根为-7,-9; 其设计程序如下: >> A=[-0.8 0.02;-0.02 0]; B=[0.05 1;0.001 0]; P=[-7 -9]; k=place(A,B,P) k = 1.0e+003 * -0.0200 9.0000 0.0072 -0.4500 程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。 2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
线性系统理论
系统控制的理论和实践被认为是对20世纪人类生产和社会活动产生重大影响的科学领域之一。其中,线性系统理论是系统控制理论中最基础,最成熟的分支。系统存在于自然界和人类社会的各个领域。从系统控制理论的角度来看,它通常被定义为具有某些相关功能和受限制部分的特定功能的整体。系统状态由描述系统行为的变量表示。它具有完整性,抽象性和相对性的特征。 摘要 线性系统科学与技术是一门应用广泛的学科。面对各种各样的复杂系统,控制对象可以是确定性的或随机的,并且控制方法可以是常规控制或最优控制。控制理论与社会生产和科学技术的发展密切相关,并且在近代发展迅速。线性系统理论是现代控制理论中最基础,最成熟的分支,是控制科学的重要课程之一。 线性系统理论内容丰富,思想深刻,方法多样,富有美感。它不仅为线性控制系统的建模,分析和综合提供了完整的理论,而且还包含许多解决复杂问题的方法。这些方法简化了系统的建模,分析和综合,为系统控制理论的其他分支和其他学科提供了参考。它们是解决复杂问题的有效方法。 线性系统理论的发展经历了两个阶段:经典线性系统理论和现代线性系统理论。 古典理论形成于1930年代和1940年代。奈奎斯特在1932年提出了反馈放大器的稳定性理论。波特在1940年代初提出了波特图。埃文斯在1948年提出了根轨迹理论。这表明了经典线性控制理论的
形成。古典理论在第二次世界大战中的应用取得了巨大的成功。本文主要研究单输入单输出线性时不变系统。 1950年代后,随着航空技术的发展和控制理论的应用范围的扩大,经典线性控制理论的局限性日益明显。这种情况促进了线性系统的研究,从1960年以后的古典阶段到现代阶段。美国学者R.E.卡尔曼首先将状态空间方法应用于多元线性系统的研究,提出了可控性和可观测性两个基本概念,并提出了相应的标准。1963年,例如吉尔伯特,他得到了揭示线性系统结构分解的重要结果,为现代线性系统理论的形成和发展做出了开创性的工作。1965年后,现代线性系统理论又得到发展。有许多研究多元系统的理论和方法,例如线性系统的几何理论,线性系统的代数理论和多变量频域方法。随着计算机技术的发展,线性系统的计算方法和计算机辅助设计受到越来越多的关注。
全维状态观测器的设计
实 验 报 告 课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计 评分 批阅教师签字 一、实验目的 1、 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的 极点对状态的估计误差的影响; 2、 掌握全维状态观测器的设计方法; 3、 掌握带有状态观测器的状态反馈系统设计方法。 二、实验内容 开环系统? ??=+=cx y bu Ax x &,其中 []0100001,0,10061161A b c ????????===????????--???? a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时); 绘制系统的输出阶跃响应曲线。 三、实验环境 MATLAB6、5 四、实验原理(或程序框图)及步骤
利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件就是必须对全部状态变量都能进行测量,但在实际系统中,并不就是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。因此要设法利用已知的信息(输出量y 与输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。该模型就称为状态观测器。若状态观测器的阶次与系统的阶次就是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。 设系统完全可观,则可构造如图4-1所示的状态观测器 图4-1 全维状态观测器 为求出状态观测器的反馈ke 增益,与极点配置类似,也可有两种方法: 方法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出k e ; 方法二:就是可 采用Ackermann 公式: []T o e Q A k 1000)(1Λ-Φ=,其中O Q 为可观性矩阵。 利用对偶原理,可使设计问题大为简化。首先构造对偶系统 ???=+=ξ ηξξT T T b v c A & 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可
现代控制理论概述及实际应用意义
13/2012 59 现代控制理论概述及实际应用意义 王 凡 王思文 郑卫刚 武汉理工大学能源与动力工程学院 【摘 要】控制理论作为一门科学技术,已经广泛地运用于我们社会生活的方方面面。本文介绍了现代控制理论的产生、发展、内容、研究 方法和应用以及经典控制理论与现代控制理论的差异,并介绍现代控制理论的应用。提出了学习现代控制理论的重要意义。【关键词】现代控制理论;差异;应用;意义 1.引言 控制理论作为一门科学技术,已经广泛地运用于我们社会生活的方方面面。例如,我们的教学也使用了控制理论的方法。老师在课堂上讲课,大家在课堂上听,本身可看作一个开环函数;而同学们课下做作业,再通过老师的批改,进而改进和提高老师的授课内容和方法,这就形成了一个闭环控制。像这样的例子很多,都是控制理论在生活中的应用。现代控制理论如此广泛,因此学好现代控制理论至关重要。 2.现代控制理论的产生与发展现代控制理论的产生和发展经过了很长的时期。从现代控制理论的发展历程可以看出,它的发展过程反映了人类由机械化时代进入电气化时代,并走向自动化、信息化、智能化时代。其产生和发展要分为以下几个阶段的发展。 2.1 现代控制理论的产生在二十世纪五十年代末开始,随着计算机的飞速发展,推动了核能技术、空间技术的发展,从而对出现的多输入多输出系统、非线性系统和时变系统的分析与设计问题的解决。 科学技术的发展不仅需要迅速 地发展控制理论,而且也给现代控制理论的发展准备了两个重要的条件—现代数学和数字计算机。现代数学,例如泛函分析、现代代数等,为现代控制理论提供了多种多样的分析工具;而数字计算机为现代控制理论发展提供了应用的平台。 2.2 现代控制理论的发展五十年代后期,贝尔曼(Bellman)等人提出了状态分析法;在1957年提出了动态规则;1959年卡尔曼(Kalman)和布西创建了卡尔曼滤波理论;1960年在控制系统的研究中成功地应用了状态空间法,并提出了可控性和可观测性的新概念;1961年庞特里亚金(俄国人)提出了极小(大)值原理;罗森布洛克(H.H.Rosenbrock)、麦克法轮(G.J.MacFarlane)和欧文斯(D.H.Owens)研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。 20世纪70年代奥斯特隆姆(瑞典)和朗道(法国,https://www.360docs.net/doc/b018614960.html,ndau)在自适应控制理论和应用方面作出了贡献。 与此同时,关于系统辨识、最优控制、离散时间系统和自适应控制的发展大大丰富了现代控制理论的内容。 3.现代控制理论的内容及研究方法 现代控制理论的内容主要有为系统辨识;最优控制问题;自适应控制问题;线性系统基本理论;最佳滤波或称最佳估计。 (1)系统辨识 系统辨识是建立系统动态模型的方法。根据系统的输入输出的试验数据,从一类给定的模型中确定一个被研究系统本质特征等价的模型,并确定其模型的结构和参数。 (2)最优控制问题 在给定约束条件和性能指标下,寻找使系统性能指标最佳的控制规律。主要方法有变分法、极大值原理、动态规划等极大值原理。现代控制理论的核心即:使系统的性能指标达到最优(最小或最大)某一性能指标最优:如时间最短或燃料消耗最小等。 (3)自适应控制问题 在控制系统中,控制器能自动适应内外部参数、外部环境变化,自动调整控制作用,使系统达到一定意义下的最优。模型参考自适应控制
二阶倒立摆实验报告
. I 线性系统实验报告 : 院系:航天学院 学号: . .
2015年12月
1.实验目的 1)熟悉Matlab/Simulink仿真; 2)掌握LQR控制器设计和调节; 3)理解控制理论在实际中的应用。 倒立摆研究的意义是,作为一个实验装置,它形象直观,简单,而且参数和形状易于改变;但它又是一个高阶次、多变量、非线性、强耦合、不确定的绝对不稳定系统的被控系统,必须采用十分有效的控制手段才能使之稳定。因此,许多新的控制理论,都通过倒立摆试验对理论加以实物验证,然后在应用到实际工程中去。因此,倒立摆成为控制理论中经久不衰的研究课题,是验证各种控制算法的一个优秀平台,故通过设计倒立摆的控制器,可以对控制学科中的控制理论有一个学习和实践机会。 2.实验容 1)建立直线二级倒立摆数学模型 对直线二级倒立摆进行数学建模,并将非线性数学模型在一定条件下化简成线性数学模型。对于倒立摆系统,由于其本身是自不稳定的系统,实验建立模型存在一定的困难,但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系应用经典力学理论建立系统的动
力学方程。对于直线二级倒立摆,由于其复杂程度,在这里利用拉格朗日方程推导运动学方程。 由于模型的动力学方程中存在三角函数,因此方程是非线性的,通过小角度线性化处理,将动力学非线性方程变成线性方程,便于后续的工作的进行。 2)系统的MATLAB仿真 依据建立的数学模型,通过MATLAB仿真得出系统的开环特性,采取相应的控制策略,设计控制器,再加入到系统的闭环中,验证控制器的作用,并进一步调试。控制系统设计过程中需要分析容主要包括得出原未加控制器时系统的极点分布,系统的能观性,能控性。 3)LQR控制器设计与调节实验 利用线性二次型最优(LQR)调节器MATLAB仿真设计的参数结果对平面二阶倒立摆进行实际控制实验,参数微调得到较好的控制效果,记录实验曲线。 4)改变控制对象的模型参数实验 调整摆杆位置,将摆杆1朝下,摆杆2朝上修改模型参数、起摆条件和控制参数,重复3的容。 3.实验步骤
线性系统理论
Linear Systems Theory: A Structural Decomposition Approach 线性系统理论: 结构分解法 Ben M. Chen (陈本美) 新加坡国立大学 Zongli Lin(林宗利) 美国弗吉尼亚大学 Yacov Shamash (雅科夫 司马诩) 美国纽约州立大学石溪分校
此书献给我们的家人 前两位作者谨以这中译版献给他们的母校 厦门大学
目录 绪论 1 导论和预览 1.1 背景 1.2 各章预览 1.3 符号和术语 2 数学基础 2.1 导论 2.2 矢量空间和子空间 2.3 矩阵代数和特性 2.3.1 行列式、逆和求导 2.3.2 秩、特征值和约当型 2.3.3 特殊矩阵 2.3.4 奇异值分解 2.4 范数 2.4.1 矢量范数 2.4.2矩阵范数 2.4.3 连续时间信号范数 2.4.4 离散时间信号范数 2.4.5 连续时间系统范数 2.4.6 离散时间系统范数 3 线性系统理论复习 3.1 导论 3.2 动态响应 3.3 系统稳定性 3.4 可控性和可观性 3.5 系统可逆性 3.6 常态秩、有限零点和无限零点3.7 几何子空间 3.8 状态反馈和输出馈入的特性3.9 练习
4 无驱动和/或无检测系统的分解 4.1 导论 4.2 自治系统 4.3 无驱动系统 4.4 无检测系统 4.5 练习 5. 正则系统的分解 5.1 导论 5.2 SISO系统 5.3 严格正则系统 5.4 非严格正则系统 5.5 结构化分解特性的证明 5.6 系统矩阵的Kronecker型和Smith型5.7 离散时间系统 5.8 练习 6 奇异系统的分解 6.1 导论 6.2 SISO奇异系统 6.3 MIMO描述系统 6.4 定理6.3.1的证明和性质 6.5 离散时间奇异系统 6.6 练习 7 双线性变换的结构化映射 7.1 导论 7.2 连续到离散时间系统的映射 7.3 离散时间到连续时间系统的映射7.4 定理7.2.1的证明 7.5 练习 8 系统因子分解 8.1 导论 8.2 严格正则系统 8.3 非严格正则系统 8.4 离散时间系统 8.5 练习 9 通过选择传感器/执行器实现的结构配置9.1 导论 9.2 同时有限和无限零点结构配置 9.2.1 SISO系统 9.2.2 MIMO系统
线性系统大作业1
研 究 生 课 程 论 文 (2014-2015学年第一学期) 线性系统的基本特性 研究生:
线性系统理论的研究对象为线性系统。线性系统是最为简单和最为基本的一类动态系统。线性系统理论是系统控制理论中研究最为充分、发展最为成熟和应用最为广泛的一个分支。线性系统理论中的很多概念和方法,对于研究系统控制理论的其他分支,如非线性系统理论、最优控制理论、自适应控制理论、鲁棒控制理论、随机控制理论等,同样也是不可缺少的基础。 线性系统的一个基本特征是其模型方程具有线性属性即满足叠加原理。叠加原理是指,若表系统的数学描述为L ,则对任意两个输入变量u 1和u 2以及任意两个非零有限常数c 1和c 2必成立关系式: 11221122()()()L c u c u c L u c L u +=+ 对于线性系统,通常还可进一步细分为线性时不变系统(linear time-invariant systems)和线性时变系统(linear time-varying systems)两类。 线性时不变系统也称为线性定常系统或线性常系数系统。其特点是,描述系统动态过程的线性微分方程或差分方程中,每个系数都是不随时间变化的函数。从实际的观点而言,线性时不变系统也是实际系统的一种理想化模型,实质上是对实际系统经过近似化和工程化处理后所导出的一类理想化系统。但是,由于线性时不变系统在研究上的简便性和基础性,并且为数很多的实际系统都可以在一定范围内足够精确地用线性时不变系统来代表,因此自然地成为线性系统理论中的主要研究对象。 线性时变系统也称为线性变系数系统。其特点是,表征系统动态过程的线性微分方程或差分方程中,至少包含一个卷数为随时间变化的函数。在视实世界中,由于系统外部和内部的原因,参数的变化是不可避免的,因此严格地说几乎所有系统都属于时变系统的范畴。但是,从研究的角度,只要参数随时间
系统的能控性,能观测性,稳定性分析
实验报告 课程线性系统理论基础实验日期年月日 专业班级姓名学号同组人 实验名称系统的能控性、能观测性、稳定性分析及实现评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌握如何使用MATLAB进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a)了解以下命令的功能;自选对象模型,进行运算,并写出结
果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,182710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性; (c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性
系统的能控性、能观测性、稳定性分析
实 验 报 告 课程 线性系统理论基础 实验日期 年 月 日 专业班级 学号 同组人 实验名称 系统的能控性、能观测性、稳定性分析及实现 评分 批阅教师签字 一、实验目的 加深理解能观测性、能控性、稳定性、最小实现等观念。掌 握如何使用MATLAB 进行以下分析和实现。 1、系统的能观测性、能控性分析; 2、系统的稳定性分析; 3、系统的最小实现。 二、实验内容 (1)能控性、能观测性及系统实现 (a )了解以下命令的功能;自选对象模型,进行运算,并写出结 果。 gram, ctrb, obsv, lyap, ctrbf, obsvf, minreal ; (b )已知连续系统的传递函数模型,18 2710)(23++++=s s s a s s G ,当a 分别取-1,0,1时,判别系统的能控性与能观测性;
(c )已知系统矩阵为???? ??????--=2101013333.06667.10666.6A ,??????????=110B ,[]201=C ,判别系统的能控性与能观测性; (d )求系统18 27101)(23++++= s s s s s G 的最小实现。 (2)稳定性 (a )代数法稳定性判据 已知单位反馈系统的开环传递函数为:) 20)(1()2(100)(+++=s s s s s G ,试对系统闭环判别其稳定性 (b )根轨迹法判断系统稳定性 已知一个单位负反馈系统开环传递函数为 ) 22)(6)(5()3()(2+++++=s s s s s s k s G ,试在系统的闭环根轨迹图上选择一点,求出该点的增益及其系统的闭环极点位置,并判断在该点系统闭环的稳定性。 (c )Bode 图法判断系统稳定性 已知两个单位负反馈系统的开环传递函数分别为 s s s s G s s s s G 457.2)(,457.2)(232231-+=++= 用Bode 图法判断系统闭环的稳定性。 (d )判断下列系统是否状态渐近稳定、是否BIBO 稳定。 []x y u x x 0525,100050250100010-=????? ?????+??????????-=
线性系统理论综述
线性系统理论课程大作业论文线性系统理论综述及其应用
这学期学习的线性系统理论属于系统控制理论的一个最为基本和成熟发展的分支,主要包括以下内容:介绍采用系统理论解决工程问题的一般步骤,明确建模、分析、综合在解决实际问题中的作用,并重点介绍线性系统模型的特征和分析方法;介绍系统的状态空间描述,结余状态空间方法的分析和系统结构特征和结构的规范分解以及状态反馈及其性质等。 一.线性系统理论研究内容综述 系统是系统控制理论所要研究的对象,从系统控制理论的角度,通常将系统定义为由相互关联和相互制约的若干部分组成的具有特定功能的整体。 动态系统是运动规律按照确定规律或者确定的统计的规律岁时间演化的一类系统,动态系统的行为由各类变量间的关系来表征,系统的变量可以分为三种形式,一类是反映外部对系统的影响或者作用的输入变量组,如控制、投入、扰动等;二是表征系统状态行为的内部状态变量组;三是反映系统外部作用或影响的输入变量组如响应,产出。表征系统动态的过程的数学描述具有两类基本形式,一是系统的内部描述,另一组是输入变量对状态变量的组的动态影响。从机制的角度来看,动态系统可被分类为连续系统变量动态系统和离散事件动态系统;从特征的角度,动态系统可分别分类为线性系统和非线性系统,参数集成系统和分布参数系统;从作用时间类型角度,动态系统可被称为连续时间系统和离散时间系统。 线性系统理论是系统控制理论最为成熟和最为基础的分支。他是现代控制理论的一个重要组成部分,也是对经典控制理论的延申。现代控制理论主要是着重研究现性状态的运动规律和改变这种规律的可能性和方法。线性系统的理论和方法是建立在建模的基础上。在建模的基础上,可以进一步把线性系统的理论进一步区分为“分析理论”和“综合理论”。分析理论分为定量分析和定性分析,定量分析是着重于研究对系统性能和控制具有重要意义的结构特性。系统综合理论是建立在分析的基础上,系统综合目的是使系统的性能达到期望的指标或实现最优化。 线性系统理论的研究对象为线性系统,线性系统为最为简单和最为基本的一类动态系统。线性系统理论是系统控制理论中最为充分、发展最为成熟和应用最为广泛的一个开支。线性系统的的一个基本特征是其模型满足线性叠加原理。对于线性系统的研究也可以进一步分为线性是不变系统和线性时不变系统两类。对系统进行建模也是控制理论中具有重要的作用。对系统建模的作用多样性和基本型、途径以及系统的建模的准则=====系统建模的简单性和分析
线性系统理论_中英文对照
[Linear system theory and design] Absolutely integrable 绝对可积 Adder 加法器 Additivity 可加性 Adjoint 伴随 Aeronautical航空的 Arbitrary 任意的 Asymptotic stability渐近稳定 Asymptotic tracking 渐近跟踪 Balanced realization 平衡实现 Basis 基 BIBO stability 有界输入有界输出稳定 Black box 黑箱 Blocking zero 阻塞零点 Canonical decomposition 规范分解 Canonical规范 Capacitor 电容 Causality 因果性 Cayley-Hamilton theorem 凯莱-哈密顿定理Characteristic polynominal 特征多项式 Circumflex 卷积
Coefficient 系数 Cofactor 余因子 Column degree 列次数 Column-degree-coefficient matrix 列次数系数矩阵Column echelon form 列梯形 Column indices 列指数集 Column reduced 列既约 Common Divisor公共因式 Companion-form matrix 规范型矩阵Compensator 调节器,补偿器 Compensator equation补偿器方程 Control configuration 控制构型Controllability 能控性 Convolution 卷积 Conventional常规的 Coprimeness互质 Corollary推论 Cyclic matrix 循环矩阵 Dead beat design 有限拍设计 Decoupling 解耦 Degree of rational function有理矩阵的次数Description of system系统描述
控制理论与控制工程简介
控制理论与控制工程 081101 学科专业简介 “控制理论与控制工程”专业前身为工业自动化专业,1997年按照国务院学位委员会和原国家教育委员会颁布的《授予博士、硕士学位和培养研究生的学科、专业目录》改为现名,是“控制科学和工程”所属的二级学科。该专业于1979年开始培养硕士研究生,1986年获得硕士学位授予权,1995年获得博士学位授予权,1997年设立“控制科学和工程”博士后流动站,2003年被教育部确定为“长江学者奖励计划”特聘教授设岗学科。 本学科是市教委的重点建设学科。目前已组成了一支以中青年高层次科技人员为主体的科研骨干队伍。截至2003年12月,该专业有长江学者特聘教授1名,教授19名、副教授5名。此外,本学科还聘任了包括四名科学院院士和一批国务院学科评审专家在的知名学者担任顾问和兼职教授。近5年来,该专业已培养了博士27名,硕士179名,出站博士后10名。该学科在相关研究领域承担了大量的国家科技攻关项目、"863"计划项目、国家自然基金项目以及其他类型的国家、部委、省市及企业科研项目,获得了一大批科研成果和国家或省部级科技进步奖,出版了一批有影响的著作和教材,发表了大量的高水平学术论文。其中,1995年以来,共取得了2项国家级获奖成果,23项省部级获奖成果,已完成和正在进行的国家自然科学基金及863项目有16项,在相关学术会议和专业学术刊物上发表论文500余篇,出版教材、译著和专著数十部。 一、培养目标 1、较好地掌握马克思主义基本原理、思想、理论和“三个代表”重要思想, 树立正确的世界观、人生现和价值观,坚持四项基本原则,热爱祖国, 遵纪守法,品德优良,乐于奉献,积极为社会主义现代化建设服务。 2、在本学科领域,较好地掌握坚实宽广的基础理论和系统深入的专门知
状态观测器的设计——报告
东南大学自动化学院 实 验 报 告 课程名称: 自动控制基础 实验名称: 状态观测器的设计 院 (系): 自动化学院 专 业: 自动化 姓 名: 吴静 学 号: 08008419 实 验 室: 机械动力楼417室 实验组别: 同组人员: 实验时间:2011年05月13日 评定成绩: 审阅教师: 一、实验目的 1. 理解观测器在自动控制设计中的作用 2. 理解观测器的极点设置 3. 会设计实用的状态观测器 二、实验原理 如果控制系统采用极点配置的方法来设计,就必须要得到系统的各个状态,然后才能用状态反馈进行极点配置。然而,大多数被控系统的实际状态是不能直接得到的,尽管系统是可以控制的。怎么办?如果能搭试一种装置将原系统的各个状态较准确地取出来,就可以实现系统极点任意配置。于是提出了利用被控系统的输入量和输出量重构原系统的状态,并用反馈来消除原系统和重构系统状态的误差,这样原系统的状态就能被等价取出,从而进行状态反馈,达到极点配置改善系统的目的,这个重构的系统就叫状态观测器。 另外,状态观测器可以用来监测被控系统的各个参量。 观测器的设计线路不是唯一的,本实验采用较实用的设计。 给一个被控二阶系统,其开环传递函数是G (s )=12 (1)(1)K T s T s ++ ,12 K K K =观测器如图示。
设被控系统状态方程 构造开环观测器,X ∧ Y ∧ 为状态向量和输出向量估值 由于初态不同,估值X ∧ 状态不能替代被控系统状态X ,为了使两者初态跟随,采用输出误差反馈调节,加入反馈量H(Y-Y)∧ ,即构造闭环观测器,闭环观测器对重构造的参数误差也有收敛作用。 也可写成 X =(A-HC)X +Bu+HY Y CX ? ∧ ∧ ∧∧ = 只要(A-HC )的特征根具有负实部,状态向量误差就按指数规律衰减,且极点可任意配置,一般地,(A-HC )的收敛速度要比被控系统的响应速度要快。工程上,取小于被控系统最小时间的3至5倍,若响应太快,H 就要很大,容易产生噪声干扰。 实验采用X =A X +Bu+H(Y-Y)? ∧ ∧∧ 结构,即输出误差反馈,而不是输出反馈形式。 取:1212min 35 20,5,2,0.5,0.2K K T T t λ-= =====,求解12g g ?????? 三、实验设备: THBDC-1实验平台 THBDC-1虚拟示波器 Matlab/Simulink 软件 四、实验步骤 按要求设计状态观测器 (一) 在Matlab 环境下实现对象的实时控制 1. 将ZhuangTai_model.mdl 复制到E:\MATLAB6p5\work 子目录下,运行matlab ,打开ZhuangTai_model.mdl 注:‘实际对象’模块对应外部的实际被控对象,在simulink 下它代表计算机与外部接口: ● DA1对应实验面板上的DA1,代表对象输出,输出通过数据卡传送给计算机; ● AD1对应实验面板上的AD1,代表控制信号,计算机通过数据卡将控制信号送给实际对象;
线性系统理论基础课设
摘要 建模、控制与优化是控制理论要解决的主要问题。在这些问题中,广泛采用了现代数学方法,使得控制理论的研究不断深入,取得了丰硕的成果。建模是控制理论中所要解决的第一个问题。控制理论中的建模方法主要有两种,一是经验建模,二是根据物理规律建模。所研究的对象主要是动态模型,一般用微分方程或差分方程来描述。设计控制系统是控制理论的核心内容。在线性系统中,我们所用到的数学工具是拓扑、线性群。在非线性系统中,我们用到了微分几何。可以说微分几何是非线性控制理论的数学基础。优化是控制的一个基本目的,而最优控制则是现代控制理论的一个重要组成部分。例如庞特里亚金的极大值原理、贝尔曼的动态规划,都是关于优化和最优控制问题的。 本报告首先介绍了直流电动机的物理模型, 并测量计算了它的具体参数。然后根据牛顿第二定律和回路电压法分别列写运动平衡方程式和电机电枢回路方程式,从而通过一些数学变换抽象出了以电压为输入、转速为输出、电流和转速为状态变量的数学模型。通过对抽象出来的模型进行性能分析,确定需要使用状态观测器来修正系统。继而借助MATLAB软件对转速环进行了状态反馈控制器的设计,使系统的阶跃响应达到了设计指标。 关键词:建模控制理论设计控制系统直流电动机转速状态反馈控制器
1 系统的物理模型、参数及设计要求 -------------------- 4 1.1 系统模型 ------------------------------------- 4 1.2 系统参数 ------------------------------------- 5 1.3 设计要求 ------------------------------------- 5 2 系统模型的建立------------------------------------ 6 2.1 模型抽象 ------------------------------------- 6 2.2 所建模型的性能分析 --------------------------- 7 3 系统状态观测器的设计----------------------------- 11 3.1 期望配置的极点的确定以及状态观测器的设计----- 11 3.1.1 第一组极点配置-------------------------- 11 3.1.2 第二组极点配置-------------------------- 11 3.2 状态观测器的设计 ---------------------------- 12 3.2.1 第一组极点------------------------------ 12 3.2.2 第二组极点------------------------------ 14 3.3 状态观测器的仿真图 -------------------------- 16 3.4 原系统加了状态观测器后的仿真结果图及分析----- 17 3.4.1 第一组极点------------------------------ 17 3.4.2 第二组极点------------------------------ 18 4 状态观测器极点配置与PID方法的比较 --------------- 20 4.1 直流电机转速、电流PID控制的设计------------- 20 4.2 两种方法的比较 ------------------------------ 21
过程控制系统综合设计报告
过程控制系统综合设计报告 班级: 姓名: 学号: 学期:
一、实验目的与要求 1.掌握DDC控制特点; 2.熟悉CS4100实验装置,掌握液位控制系统和温度控制系统构成; 3.熟悉智能仪表参数调整方法及各参数含义; 4.掌握由CS4100实验装置设计流量比值控制、液位串接控制、液位前馈反馈控制及四水箱解耦控制等设计方法; 5.掌握实验测定法建模,并以纯滞后水箱温度控制系统作为工程案例,掌握纯滞后水箱温度控制系统的建模,并用DDC控制方案完成控制算法的设计及系统调试。 以水箱流量比值控制、水箱液位串接控制、水箱液位前馈反馈控制及四水箱解耦控制为被被控对象,完成系统管路设计、电气线路设计、控制方案确定、系统调试、调试结果分析等过程的训练。以纯滞后水箱作为被控对象,以第二个水箱长滞后温度作为被控量,完成从实验测定法模型建立、管路设计、线路设计、控制方案确定、系统调试、结果分析等过程的训练。 具体要求为: 1)检索资料,熟悉传感器、执行器机械结构及工作原理。 2)熟悉CS4100过控实验装置的机械结构,进行管路设计及硬件接线; 3)掌握纯滞后水箱温度控制系统数学模型的建立方法,并建立数学模型; 4)掌握智能仪表参数调节方法; 5)进行控制方案设计,结合具体数学模型,计算系统所能达到性能指标,并通过仿真掌握控制参数的整定方法; 6)掌握系统联调的步骤方法,调试参数的记录方法,动态曲线的测定记录方法。记录实验数据,采用数值处理方法和相关软件对实验数据进行处理并加以分析,记录实验曲线,与理论分析结果对比,得出有意义的结论。 7)撰写实验设计报告、实验报告,具体要求见:(五)实践报告的内容与要求。 二、实验仪器设备与器件 1.CS4100过程控制实验装置 2.PC机(组态软件) 3.P909智能仪表若干
自控系统理论实验性能分析
摘要 在现代工程中的许多领域中,为了减轻对人们的劳动强度、提高控制质量以及完成人工无法实现的任务,需要由机器来代替人的工作,实现对生产过程及各种设备的自动控制。实际上,自动控制技术已经渗透到人类活动的各个方面。自动控制技术最显著的特征就是通过对各种机器,各种物理参量、工业生产过程的控制直接造福于社会。 关键字:质量、代替、参量、造福社会 目录
摘要……………………………………………………………………………………… 第1章前言…………………………………………………………………… 1.1课题背景……………………………………………………………………… 1.2本文的研究内容…………………………………………………………………… 第2章概述与时域分析………………………………………………………………. 2.1 自动控制基本概念自动控制系统的基本控制方式……………………………… 2.2 自动控制系统的分类…………………………………………………………… 2.3 对控制系统的性能要求………………………………………………………. 2.4 系统性能指标………………………………………………………………… 2.5 一阶系统性能分析…………………………………………………………. 2.6 二阶系统性能分析………………………………………………………… 2.7 控制系统稳定性分析…………………………………………………………. 第3章实验原理……………………………………………………………………. 3.1 控制系统典型环节的模拟……………………………………………………… 3.2 二阶系统的性能瞬时响应分析…………………………………………………. 第4章液位控制系统………………………………………………………………… 4.1 液位控制………………………………………………………………………… 4.2 系统工作原理…………………………………………………………………… 4.3 控制回路硬件图……………………………………………………………… 4.4 系统硬件设计………………………………………………………………… 4.5 控制系统的结构组成………………………………………………………… 4.6 设备连接………………………………………………………………………… 4.7 PID控制程序设计................................................. 第5章自动控制毕业论文设计总结…………………………………………………. 谢辞………………………………………………………………………………………… 参考文献………………………………………………………………………………… 第1章前言
线性系统理论MATLAB大作业.(DOC)
兰州理工大学2015级线性系统理论大作业 线性系统理论Matlab 实验报告 1、在造纸流程中,投料箱应该把纸浆流变成2cm 的射流,并均匀喷洒在网状传送带上。为此,要精确控制喷射速度和传送速度之间的比例关系。投料箱内的压力是需要控制的主要变量,它决定了纸浆的喷射速度。投料箱内的总压力是纸浆液压和另外灌注的气压之和。由压力控制的投料箱是个耦合系统,因此,我们很难用手工方法保证纸张的质量。 在特定的工作点上,将投料箱线性化,可以得到下面的状态空间模型: u x x ?? ????+??????-+-=0001.0105.0002.002.08.0. []21,x x y = 其中,系统的状态变量x1=液面高度,x2=压力,系统的控制变量u1=纸浆流量u2=气压阀门的开启量。在上述条件下,试设计合适的状态变量反馈控制器,使系统具有实特征根,且有一个根大于5 解:本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数时系统不稳定,这样的设计是无意义的,故而不妨采用状态反馈后的两个期望特征根为-7,-6,这样满足题目中所需的要求。要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控。 Matlab 判断该系统可控性和求取状态反馈矩阵K 的程序,如图1所示,同时求得加入状态反馈后的特征根并与原系统的特征根进行了对比。
图1系统能控性、状态反馈矩阵和特征根的分析程序上述程序的运行结果如图2所示: 图2系统能控性、反馈矩阵和特征根的运行结果
线性系统理论
线性系统理论之观察 摘要 系统控制的理论和实践被认为是20世纪对人类生产活动和社会发生重大影响的科学领域之一。在系统和控制科学领域内,线性系统是基本的研究对象,并在过去几十年中取得了众多结果和重要进展,已经形成和发展为相当完整和相当成熟的线性系统理论。线性系统理论的重要性首先在于它的基础性,其大量的概念、方法、原理和结论,对于系统与控制理论的许多学科分支,诸如最优控制、非线性控制、鲁棒控制、随机控制、智能控制、系统辨识和参数估计、过程控制、数字滤波和通信系统等,都具有重要和基本的作用,成为学习和研究这些学科必不可少的基础知识。 关键词最优控制、非线性控制、鲁棒控制、随机控制、智能控制、系统辨识和参数估计、过程控制、数字滤波和通信系统等 线性系统理论的主要内容 线性系统理论着重于研究线性系统状态的运动规律和改变这种运动规律的可能性和方法,以建立和揭示系统结构、参数和性能间的确立和定量的关系。通常,研究系统运动规律的问题称为分析问题,研究改变运动规律的可能性和方法的问题则为综合问题。从哲学的角度而言,前者属于认识系统的范畴,后者属于改造系统的范围。 线性系统的理论和方法是建立在其模型基础之上的。不管是对系统进行分析还是综合,一个首要的前提是建立器系统数学模型。建立模型时,最重要的是确定什么是需要反映和研究的主要系统属性,并在此基础上来定出他们的定量关系。随着所观察问题的性质的不同,
一个系统可以有不同的模型,它们代表了系统不同侧面的属性。系统数学模型的基本要素是变量、参量、常量和它们之间的关系。变量包括状态变量、输入变量和输出变量,有些情况下还需考虑扰动变量。参量可以是系统的参数或表征系统性能的参数,前者受系统环境的影响课产生变动,后者可随设计要求而人为地改变其取值。常量是指系统中不随时间改变的参数。线性系统的数学模型有两种主要形式,即时间域模型和频率域模型。时间域模型变现为微分方程组或差分方程组,可同时适用于线性时不变和线性时变系统。频率域模型表现为传递函数和频率响应,只适用于线性时不变系统。对应于系统的这两项模型,已经发展和形成线性系统理论中的两类不同方法。 (1)线性系统分析理论 (2)线性系统综合理论 线性系统理论的主要内容包括:①与系统结构有关的各种问题,例如系统的结构分解问题和解耦问题等。系统结构的规范分解(见能观测性)是其中的著名结果。②关于控制系统中反馈作用的各种问题,包括输出反馈和状态反馈对控制系统性能的影响和反馈控制系统的综合设计等问题。极点配置是这方面的主要研究课题。③状态观测器问题,研究用来重构系统状态的状态观测器的原理和设计问题。④实现问题,研究如何构造具有给定的外部特性的线性系统的问题,主要研究课题是最小实现问题。⑤几何理论,即用几何观点研究线性系统的全局性问题(见线性系统几何理论)。⑥代数理论,用抽象代数方法研究线性系统,把线性系统理论抽象化和符号化。其中最有名的是模
现代控制理论课程报告
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也