纯气动应用实例

第八章 纯气动应用实例
8.1冲压印字机
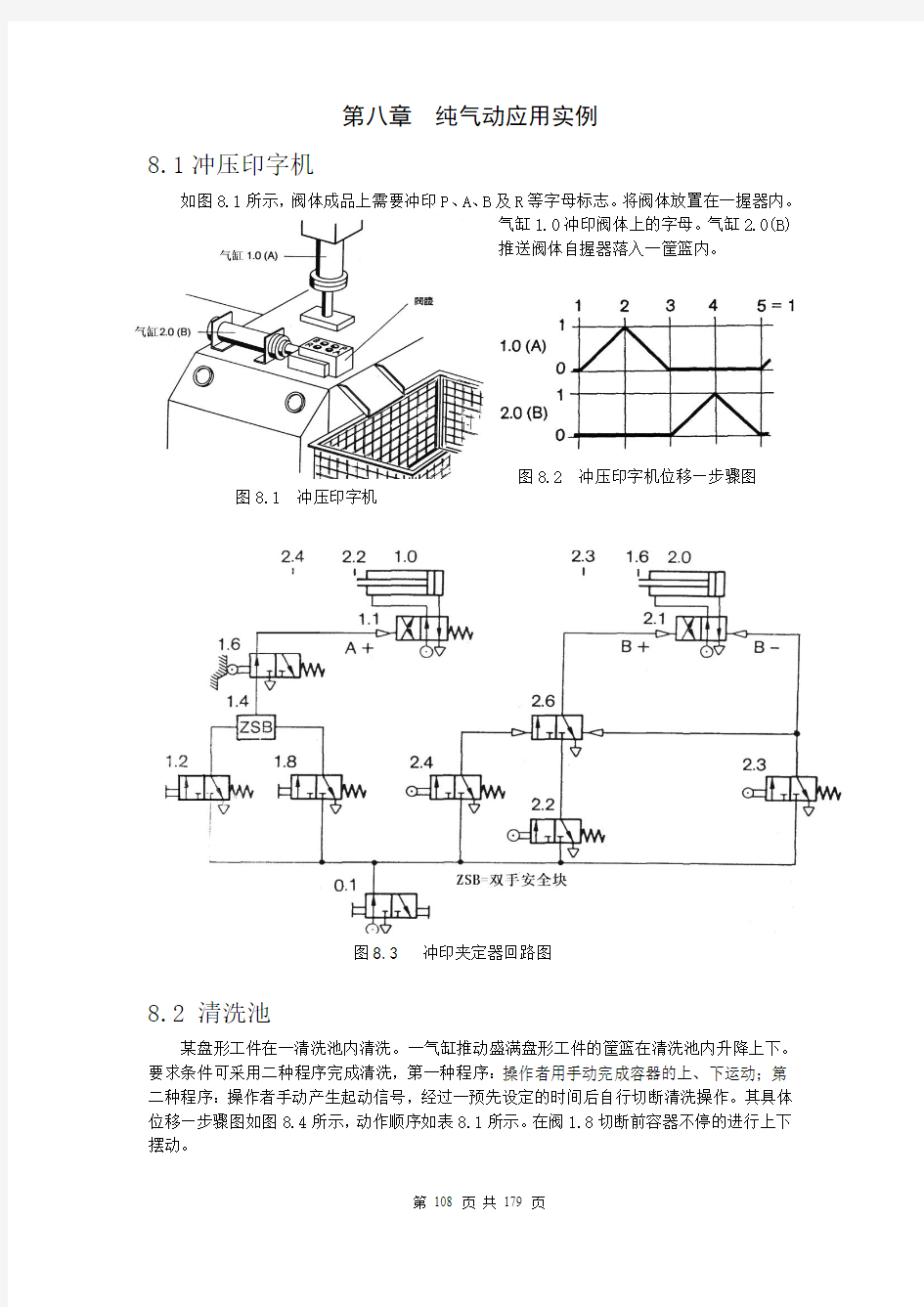
如图8.1所示,阀体成品上需要冲印P 、A 、B 及R 等字母标志。将阀体放置在一握器内。
气缸1.0冲印阀体上的字母。气缸2.0(B)推送阀体自握器落入一筐篮内。
8.2 清洗池
某盘形工件在一清洗池内清洗。一气缸推动盛满盘形工件的筐篮在清洗池内升降上下。 要求条件可采用二种程序完成清洗,第一种程序:操作者用手动完成容器的上、下运动;第二种程序:操作者手动产生起动信号,经过一预先设定的时间后自行切断清洗操作。其具体位移—步骤图如图8.4所示,动作顺序如表8.1所示。在阀1.8切断前容器不停的进行上下摆动。
表8.1 清洗池控制顺序图
8.3 滚珠轴承的装配夹持器
在一装配在线上装配滚珠轴承。
滚珠轴承经零件装配后,利用一气压气缸1.0固定握住。气缸2.0(B)操作黄油压床使滚珠轴承充满黄油。因为在此装配在线需要装配不同尺寸的滚珠轴承,黄油压床的冲程速度须为可以调整。
控制顺序:
操作阀
1.2(起动)使阀1.1在
Z 接转。气缸1.0(A)外伸,压紧滚珠轴承。在气缸的外端点位置,操作阀1.12/2.2及因此通过梭动阀1.4使控制链1被自动保持。在同时一个讯号
送入阀2.1的Z 。使气缸2.0(B)外伸至前端点位置。操作阀2.3后开始回行运动。在阀1.9、阀2.3及1.7使回动阀1.5/2.6接转前,气缸2.0(B)继续产生摆动运动。压缩空气进入作动组件2.1的Y 。气缸2.0(B)回行至后端点位置。空气进入阀1.5/2.6及阀1.3/l.6的
Z,使阀1.1排放。气缸1.0(A)再度回到后端点位置。阀1.8及1.10联合成为一安全措施。当气缸1.0(A)完全缩回时才能开始新的循环。
8.4 冲口器
夹持器在工件的孔端冲三个开口。
该设备的工作原理如图8.8所示。用手将工件放在夹持器内。起动讯号使气缸1.0(A)移送冲模进入长方形工件内。自此以后,气缸2.0(D)、3.0(C)及4.0(D)一个接一个推动冲头在工件孔内冲开口。在气缸4.0(D)的最后冲口操作完成后,所有三个冲糙气缸2.0(B )、3.0(C)及4.0(D)返回至它们的起始位置。气缸1.0(A)从工件抽回冲模,完成最后的运动。用手将已冲口工件从夹持器上拿出。该设备的位移一步骤图如图8.9所示,动作顺序如表8.2所示。
表8.2 利用回动阀控制的顺序表
冲口器的气动回路图如图8.10、8.11所示。
8.5 冰淇淋喷巧格力机
在冰淇淋表面喷涂一层巧格力作装饰。气缸1.0(A )启喷枪阀。在同时启动气缸2.0(B)及3.0(C)。气缸2.0(B)推动冰淇淋块缓缓前进,气缸3.0(C
)在舆纵向冲程成
直角方向导引喷枪的摆转运动。当气缸2.0(B )到达前端点位置时,气缸1.0(A )关闭喷枪阀以及气缸2.0(B)及3.0(C),返回至它们的起始位置。该气动系统应具有自动及手动操作功能,并且能对冰淇淋块进行记数。
冰淇淋喷涂机控制顺序如下:按下气动阀1.2,使阀0.1在Z 被接转。因为压缩空气进入管路1,作动组件1.1、2.1及3.1在Z 接转。气缸l.0(A)开启喷枪,气缸2.0(B)推动冰淇淋缓缓向前以及气缸3.0(c)前后摆动喷枪。当气缸2.0(B)到达前端点位置时,操作阀1.3/2.3,使回动阀0.1在Z 接转以及压缩空气进入管路2,同时使管路l 排放。
所有三个气缸皆回行到它们的端点位置。
此系统可以通过阀1.4从手动(MAN)接转至自动(AUT)。
一个记数器记录已经喷涂巧格力
的冰淇淋块。
8.6 螺丝塞的装配夹持器
将 O 型密封圈配装在阀的螺丝塞上。螺丝塞系通过一振动器进给到夹持器来。安装在气缸2.0(B)上的一个叉检起一个螺丝塞。当起动讯号加入时,气缸(A)提升O 型密封圈向上,同时气缸2.0(B)连叉返回。此时螺丝塞位在O 型密封圈上面。气缸3.0(C )压螺丝塞入O 型密封圈。然后气缸1.0(A )、2.0(B)及3.0(C)返回至它们的起始位置。气缸4.0(D)从夹持器提升工件。由一吹气喷口5.0(E)吹入箱内。
螺丝塞的装配夹持器位移一步骤图如图8.15所示。其动作顺序如表8.3所示,回路图如图8.16所示。
表8.3 螺丝塞的装配夹持器动作顺序表
注:吹气喷口5.0(E)随同步骤7同时间吹气
Flac3D命令--完整经典版
实例分析命令: 1. X ,Y ,Z 旋转 Shift+ X ,Y ,Z 反向旋转 Gen zone ……;model ……;prop ……(材料参数);set grav 0,0,-9.81(重力加速度) plot add block group red yellow 把在group 中的部分染成红色和黄色 plot add axes black 坐标轴线为黑色;print zone stress% K 单元应力结果输出 ini dens 2000 ran z a b (设置初始密度,有时不同层密度不同);ini ……(设置初始条件);fix ……(固定界面) set plot jpg ;set plot quality 100 ;plot hard file 1.jpg 图像输出(格式、像素、名称) plot set magf 1.0视图的放大倍数为1.0;plo con szz z 方向应力云图 2. ini z add -1 range group one 群one 的所有单元,在z 方向上向下移动1m ;然后合并 命令 gen merge 1e-5 range z 0此命令是接触面单元合并成一个整体,1e-5是容差 3. (基坑开挖步骤):Step 1: create initial model state (建立初始模型)Step 2: excavate trench (开挖隧道) 4. group Top range group Base not 定义(群组Base 以外的为)群组Top 5. plot blo gro 使得各个群组不同颜色显示 6. (两个部分间设置界面;切割法):gen separate Top 使两部分的接触网格分离 为两部分;interface 1 wrap Base Top 在(Base 和Top )这两部分之间添加接触单元;plot create view_int 显示,并创建标题view_int ;plot add surface 显示表面;plot add interface red 界面颜色红色 7. (简单的定义函数及运行函数)new ;def setup 定义函数setup ;numy = 8定义常 量numy 为8;depth = 10.0 定义depth 为10;end 结束对函数的定义;setup 运行函数setup 8. (隧道生成)上部圆形放射性圆柱及下部块体单元体的建立,然后镜像。 9. 模拟模型的材料问题时为什么要去定义某个方向上的初始速度?— 10. 渐变应力施加:apply nstress -1e6 gradient 0,0,1e5 range z 3.464,0 plane dip 60 dd 270 origin .1 0 0;施加法向应力:apply nstress -1e6 range plane dip 60 dd 270 origin .1 0 0 11. d ip dd 确定平面位置使用:(纠结) 12. p rint gp position range id=14647 输出节点坐标 13. a pply sxx -10e6 gradient 0 , 0, 1e5 range z -100 , 0在这个求解方程中,z 为变量,所以xx σ为:65=-1010+10xx z σ?? ;原点(0,0,0) 14. f ree x range x -.1 .1 z 6.9 10.1放松x=0 平面上,z=7,10 这一部分在x 方向的约 束(可以在此处产生破坏) 15. 体积模量K 和剪切模量G 与杨氏模量及泊松比v 之间的转换关系如下: =3(1-2v)E K G=2(1+v) E 16. 一般而言,大多数问题可以采用FLAC 3D 默认的收敛标准(或称相对收敛标准),即当体 系最大不平衡力与典型内力的比率R 小于定值10-5;(也可由用户自定义该值,命令:
运筹学应用实例分析
运筹学课程设计 实践报告 学号: 01 班级: 管理科学与工程类4班
第一部分小型案例分析建模与求解 ................................................................... 错误!未定义书签。 案例1. 杂粮销售问题 ........................................................................................................ 错误!未定义书签。 案例2. 生产计划问题 ........................................................................................................ 错误!未定义书签。 案例3. 报刊征订、推广费用的节省问题 ...................................................................... 错误!未定义书签。 案例4. 供电部门职工交通安排问题 ................................................................................ 错误!未定义书签。 案例5. 篮球队员选拔问题 ................................................................................................ 错误!未定义书签。 案例6. 工程项目选择问题 .............................................................................................. 错误!未定义书签。 案例7. 高校教职工聘任问题(建摸) .......................................................................... 错误!未定义书签。 案例8. 电缆工程投资资金优化问题 ................................................................................ 错误!未定义书签。 案例9. 零件加工安排问题 ................................................................................................ 错误!未定义书签。 案例10. 房屋施工网络计划问题 ...................................................................................... 错误!未定义书签。第二部分:案例设计 ...................................................................................................... 错误!未定义书签。 问题背景: .......................................................................................................................... 错误!未定义书签。 关键词: .............................................................................................................................. 错误!未定义书签。 一、问题的提出 .................................................................................................................. 错误!未定义书签。 二、具体问题分析和建模求解 .......................................................................................... 错误!未定义书签。 三、模型的建立对于N个应聘人员M个用人单位的指派是可行的。......................... 错误!未定义书签。
浅析运筹学在实际生活中的应用1
运筹学在实际生活中的应用 摘要:随着经济的快速发展和社会的进步,社会各行各业之间的竞争日益激烈,尤其表现为对资源的争夺。因此,在有限的资源下获得最大的利益是每个竞争者所考虑的问题,这也是经济学和运筹学所着重解决的问题。运筹学就是以数学为主要手段、着重研究最优化问题解法的学科。作为一门实用性很强的学科,运筹学可以用来很好的解决生活中的许多问题。运筹学有着广泛的应用,对现代化建设有重要作用。正因为如此,运筹学在企业决策领域中有着广泛的应用。众所周知,运筹学研究的根本目的在于对资源进行最优化配置,用数学的理论与方法指导社会管理,提高生产效率,创造经济效益。而企业投资的根本目的也是在资源的优化配置和有限资源的有效使用的基础上,达到既定目标,实现企业利润最大化。然而,随着市场竞争的日趋激烈,决策是否有效对于企业生存发展的影响愈来愈大。正确的决策可以使企业获利并促进企业的发展,而错误的或者无效的决策只能使企业无利可获甚至亏损,阻碍企业的发展。而运筹学、经济学、博弈论等决策性的科学可以引导投资者选择最佳投资组合策略,为决策者在投资决策过程中提供一些有价值的思路。用来解决人们用纯数学方法或者现实实验无法解决的问题,对企业正确决策的形成有着积极地促进作用。 关键词:运筹学;决策;应用;理论体系;效益 一、引言 人们无论从事任何工作,不管采取什么行动,都希望所制订的工作或行动方案,是一切可行方案中的最优方案,以期获得满意的结果,诸如此类的问题,通常称为最优化问题。运筹学就是以数学为主要手段、着重研究最优化问题解法的学科。求解最优化问题的关键,一是建立粗细适宜的数学模型,把实际问题化
为数学问题;二是选择正确而简便的解法,以通过计算确定最优解和最优值。最优解与最优值相结合,便是最优方案。人们按照最优方案行事,即可达到预期的目标。运筹学的应用可大可小,可以处理各种策略性的问题。 通过对运筹学的学习,无论是从简单的故事,还是真实的案例中,我们可以发现,所谓的运筹,是用最小的功效获得最大的利益。这在我们的生产生活中有极大的意义。运筹学有广阔的应用领域,它已渗透到诸如矿山、服务、库存、搜索、人口、对抗、控制、时间表、资源分配、厂址定位、能源、设计、生产、可靠性、等各个方面。 二、运筹学概述 运筹学作为一门用来解决实际问题的学科,在处理千差万别的各种问题时,一般有以下几个步骤:确定目标、制定方案、建立模型、制定解法。虽然不大可能存在能处理及其广泛对象的运筹学,但是在运筹学的发展过程中还是形成了某些抽象模型,并能应用解决较广泛的实际问题。 运筹学的思想在古代就已经产生了。敌我双方交战,要克敌制胜就要在了解双方情况的基础上,做出最优的对付敌人的方法,这就是“运筹帷幄之中,决胜千里之外”的说法。但是作为一门数学学科,用纯数学的方法来解决最优方法的选择安排,却相对较晚。也可以说,运筹学是在二十世纪四十年代才开始兴起的一门分支。运筹学的具体内容包括:规划论(包括线性规划、非线性规划、整数规划和动态规划)、图论、决策论、对策论、可靠性理论等。 三、运筹学的发展 Operation Research原意是操作研究、作业研究、运用研究、作战研究,译作运筹学,是借用了《史记》“运筹于帷幄之中,决胜于千里之外”一语中“运筹”二字,既显示其军事的起源,也表明它在我国已早有萌芽。 运筹学是一门应用科学,是应用分析、试验、量化的方法,它使用许多数学工具(包括概率统计、数理分析、线性代数等)和逻辑判断方法,来研究系统中人、财、物的组织管理、筹划调度等问题。它对管理系统中人力、物力、财力等资源进行统筹安排,为决策者提供有依据的最优方案,以期发挥最大效益。作
简单的运筹学实际应用案例
运筹学的实际应用 学生会晨读考勤巡视人员分配建模 晨读考勤制度是我校对大学一年级及二年级学生的特殊制度,针对上午第一节有课的班级——周一至周五上午第一节课有课(包括任何课程)的班级需7:30到教室组织英语晨读,未按时到达学生录入考勤系统,按迟到处理。 晨读考勤状况的盘点与巡视工作由校学生会负责。因为每天上晨读的班级数目都不一样,所以每天需要的巡查人员数目也并不同,根据每天晨读班级数目制定的每日所需巡查人数如下表所示。巡视工作枯燥繁重,所以成员在连续参与巡视工作3天后,可以连休两天。(周二至周四巡视过得人员可以在周五和下周一休息)。 学生会人数有限,所以请设计一套方案,需满足每天所需的巡查人数,又使 项目解决: 一,项目内容要求提取 (1)忽略星期六和星期日 (2)巡视人员连续工作3天后连续休息2天,忽略请假情况 (3)分配休息两天后周一至周五每天开始工作的人员,使总工作人数最少。 二,分析建模 此问题是一个典型并且简单的线性规划问题,所以接下来是建立目标函数以及对应的约束条件,并设法求解。 建立模型: Z为所需巡视人员总的人数。 设:x i(i=1,2,3,4,5)为休息两天后,周一至周五每天开始工作的学生会成员。 minZ=x1+x2+x3+x4+x5 x1+x4+x5≥40 x1+x2+x5≥55
x1+x2+x3≥30 x2+x3+x4≥48 x3+x4+x5≥30 x i≥0,i=1,2,3,4,5 三,求解 运用Matlab的linprog函数求解 编写命令: c=[1,1,1,1,1] A=[-1 0 0 -1 -1; -1 -1 0 0 -1; -1 -1 -1 0 0; 0 -1 -1 -1 0; 0 0 -1 -1 -1;] b=[-40;-55;-30;-49;-30]; Aeq=[];beq=[]; vlb=[0;0;0;0;0];vub=[] [x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub) 求解得出: x = 4.3625 32.0000 0.0000 17.0000 18.6375 fval = 72.0000
运筹学经典案例
运筹学经典案例 案例一:鲍德西((B AWDSEY)雷达站的研究 20世纪30年代,德国内部民族沙文主义及纳粹主义日渐抬头。以希特勒为首的纳粹势力夺取了政权开始为以战争扩充版图,以武力称霸世界的构想作战争准备。欧洲上空战云密布。英国海军大臣丘吉尔反对主政者的“绥靖”政策,认为英德之战不可避免,而且已日益临近。他在自己的权力范围内作着迎战德国的准备,其中最重要、最有成效之一者是英国本土防空准备。 1935年,英国科学家沃森—瓦特(R.Watson-Wart)发明了雷达。丘吉尔敏锐地认识到它的重要意义,并下令在英国东海岸的Bawdsey建立了一个秘密的雷达站。 当时,德国已拥有一支强大的空军,起飞17分钟即可到达英国。在如此短的时间内,如何预警及做好拦截,甚至在本土之外或海上拦截德机,就成为一大难题。雷达技术帮助了英国,即使在当时的演习中已经可以探测到160公里之外的飞机,但空防中仍有许多漏洞,1939年,由曼彻斯特大学物理学家、英国战斗机司令部科学顾问、战后获诺贝尔奖金的P.M.S.Blachett为首,组织了一个小组,代号为“Blachett 马戏团”,专门就改进空防系统进行研究。 这个小组包括三名心理学家、两名数学家、两名应用数学家、一名天文物理学家、一名普通物理学家、一名海军军官、一名陆军军官及一名测量人员。研究的问题是:设计将雷达信息传送给指挥系统及武器系统的最佳方式;雷达与防空武器的最佳配置;对探测、信息传递、作战指挥、战斗机与防空火力的协调,作了系统的研究,并获得了成功,从而大大提高了英国本土防空能力,在以后不久对抗德国对英伦三岛的狂轰滥炸中,发挥了极大的作用。二战史专家评论说,如果没有这项技术及研究,英国就不可能赢得这场战争,甚至在一开始就被击败。“Blackett马戏团”是世界上第一个运筹学小组。在他们就此项研究所写的秘密报告中,使用了 “Operational Research”一词,意指作战研究”或“运用研究”。就是我们所说的运筹学。Bawdseg雷达站的研究是运筹学的发祥与典范。项目的巨大实际价值、明确的目标、整体化的思想、数量化的分析、多学科的协同、最优化的结果,以及简明朴素的表述,都展示了运筹学的本色与特色,使人难以忘怀。
传感器的应用实例(一)
§X6.2传感器的应用实例(一) 班级姓名学号 学习目标: 1、知道传感器应用的一般模式. 2、理解电子秤的原理----力传感器的应用. 3、理解话筒的原理----声传感器的应用. 4、理解电熨斗的原理----温度传感器的应用. 5、会设计简单的有关传感器应用的控制电路. 自主学习: 一、力传感器的应用-----电子秤 1.电子秤理有______片、电压放大器、模数转换器微处理器和数字显示器等器件.电阻应变片受到力的作用时 ,它的____会发生变化,把应变片放在合适的电路中,他能够把物体____这个力学量转换为____这个电学量,因而电子秤是____的应用. 2.工作原理:如图6-2-1所示,弹簧钢制成的梁形元件右端固定,在梁的上下表面各贴一个应变片,在梁的自由端施力F,则梁发生弯曲,上表面拉伸,下表面压缩, 上表面应变片的电阻___,下表面应变片的电阻变小.F越大, 弯曲形变___, 应变片的阻值变化就越大.如果让应变片中通过的电流保持恒定,那 末上面应变片两端的电压变大, 下面应变片两端的电压变小. 传感器 把这两个电压的差值输出.外力越大, 输出的电压差值也就, ___ 二、声传感器的应用----话筒 1、话筒是一种常用的____,其作用是把____转换成____. 话筒分为____,____,____等几种. 2、电容式话筒:原理:是绝缘支架,薄金属膜和固定电极形成一个电容器,被直流电源充电.当声波使膜片振动时,电容发生变化,电路中形成变化的电流 ,于是电阻R两端就输出了与声音变化规律相同的电压. 3.驻极体话筒:它的特点是____,____,____,____.其工作原理同电容式话筒,只是其内部感受声波的是____. 三、温度传感器的应用-----电熨斗 1.在电熨斗中,装有双金属片温度传感器,其作用是____,当温度发生变化时, 双金属片的____不同,从而能控制电路的通断 2.电熨斗的自动控温原理: 常温下,上、下触点是接触的,但温度过高时,由于双金属片受热膨胀系数不同,上部金属膨胀____,下部金属膨胀___,则双金属片向下弯曲,使触点分离,从而切断电源,停止加热.温度降低后, 双金属片恢复原状,重新接通电源,从而保持温度不变.
中国古代的运筹学案例
中国古代优秀的运筹案例 1. 孙武与《孙子兵法》 孙武,字长卿,后人尊称其为孙武子、孙子,中国历史上著名军事家.公元前535年左右出生于齐国乐安(今山东惠民). 后来到了吴国,因为献上兵法十三篇,被吴王阖闾重用,拜为大将,和伍子胥共事,辅佐吴王,领兵攻破楚国都城郢(今湖北江陵县纪南城). 孙武在春秋末期(公元前476年前后)所著《孙子兵法》,是世界上现存最古老的兵书.其中的《始计第一》论述怎样在开战之前和战争中实行谋划的问题,以及谋划在战争中的重要意义;《作战第二》论述速战速胜的重要性;《谋攻第三》论述用计谋征服敌人的问题;《军形第四》论述用兵作战要先为自己创造不被敌人战胜的条件,以等待敌人可以被我战胜的时机,使自己“立于不败之地”;《兵势第五》论述用兵作战要造成一种可以压倒敌人的迅猛之势,并要善于利用这种迅猛之势;《虚实第六》论述用兵作战须采用“避实而击虚”的方针;《军争第七》论述如何争夺制胜的有利条件,使自己掌握作战主动权的问题;《九变第八》论述将帅指挥作战应根据各种具体情况灵活机动地处置问题,不要机械死板而招致失败,并对将帅提出了要求;《行军第九》论述行军作战中怎
样安置军队和判断敌情问题;《地形第十》论述用兵作战怎样利用地形的问题,并着重论述深入敌国作战的好处;《九地第十一》进一步论述用兵作战怎样利用地形及统兵之道的问题;《火攻第十二》论述在战争中使用火攻的办法、条件和原则等问题;《用间第十三》论述使用间谍侦察敌情在作战中的重要意义,以及间谍的种类和使用间谍的方法. 《孙子兵法》是体现我国古代军事运筹思想的最早的典籍.它考察了战争中各种依存、制约关系,总结了战争的规律,并依此来研究如何筹划兵力以争取全局的胜利. 书中的语言叙述简洁,内容也很有哲理性,后来的很多将领用兵都受到了该书的影响.《孙子兵法》对中国的文化发展有深远的影响. 2. 孙膑与齐王赛马 孙膑(约公元前380-公元前432),孙武的后世子孙,战国中期的著名军事家. 少时孤苦,年长后从师鬼谷子(著名隐士,精通兵学和纵横学)学习《孙子兵法》十三篇等兵书战策. 庞涓妒孙膑之才而将其骗至魏,施以膑刑(割去膝盖骨).后来乘齐国使团来魏之机,孙膑被齐使秘密接到齐国,并被大将田忌所赏识,留在府中做幕僚,奉为上宾. 孙膑的“斗马术”是我国古代运筹思想中争取总体最优的脍炙人口的著名范例(记载于《史记·孙子吴起列传》),成为军事上一条重要的用兵规律,即要善于用局部的牺牲去换取全局的
(完整版)生活中传感器简单应用举例
传感器 传感器在生活中的应用之十大实例及应用: 1.楼梯走道:电灯的触摸开关。功能:使在人手或是其他的导电物 体的接触下方能通电(这是我自己想的,不知事实是否如此。),此举为节约能源做出巨大贡献。 2.电饭锅:功能:到达沸腾温度(居里点)即停止加热。在某种材 料的硬件支持下,使得具有这种功能,才使得人类做出伟大的进步! 3.电子天平:功能:无需复杂操作,就能很快称出物体的质量,而 且一般来说很精确。这是因为在电子称下安装压力传感器再加上一些电子系统,使得能又快又好的称出质量,一切都得益于传感器的发展。 4.电子温度计:功能:简单快捷精确测量人体体温。在电子温度计 内部加入红外传感器,由于人体在不同温度下发射红外线的强度等因素皆有不同,利用此特点即可使用红外传感器。 5.mp4上的触摸键:功能:无需原来的机械按压,即可进行操作,使 机身的寿命更长久,尤其是“按键”更是长久!原理暂时还不是很清楚,不过可想而知应该是传感器的功劳! 6.手机的触摸屏:功能:分好几种,有的是点触摸,有的是面触摸, 不尽相同,不过原理应该是差不多,只是硬件材料上的支持有所不同,所以出现不同的操作方式,不过说回来还是传感器在发挥
作用。 7.电熨斗:功能:熨烫衣物,使衣物保持整洁。不过在加热中有一 个问题需要解决,那就是加热温度的问题,所以另一种温度传感器应运而生,在达到一定温度时,就会出现断电使温度保持在一定的范围内,此举与电饭锅有异曲同工之妙! 8.汽车称重:功能:在渡口为汽车称重,既是用上此种传感器,压 力传感器使得即使是很重的物体也能在短时间内准确称出,此为大型的压力应变片的应用。 9.自动门:功能:在一些重要场合就会有自动门的身影,当人靠近 时就会自动根据情况开关门。这些门上应该是会安装上人体传感器,当有人靠近时,就会有情况发生,所以会自动开门,当然这也是结合了若干电子系统的成果。 10.厕所小便池:功能:当人靠近时就会现有一股水流出现,当人离 开时就会第二次冲水,此举为厕所的节水以及洁净做出了巨大贡献,应该是结合光电传感器以及电子系统的成果。 综上:我们可以发现,每一种先进元件在进行应用时,都应该要结合以电子系统,才能发挥作用。
纯气动控制实例
纯气动应用实例 7.1冲压印字机 如图7.1所示,阀体成品上需要冲印P 、A 、B 及R 等字母标志。将阀体放置在一握器内。 气缸1.0冲印阀体上的字母。气缸2.0(B)推送阀体自握器落入一筐篮内。 7.2 清洗池 某盘形工件在一清洗池内清洗。一气缸推动盛满盘形工件的筐篮在清洗池内升降上下。 要求条件可采用二种程序完成清洗,第一种程序:操作者用手动完成容器的上、下运动;第二种程 序:操作者 手动产生起 动信号,经过一预先设定的时间后自行切断清洗操作。其具体位移—步骤图如图7.4所示,动作顺序如表7.1所示。在阀1.8切断前容器不停的进行上下摆动。
表7.1 顺序图 7.3 滚珠轴承的装配夹持器 在一装配在 线上装配滚珠轴 承。 滚珠轴承经零件装配后,利用一气压气缸1.0固定握住。气缸2.0(B)操作黄油压床使滚珠轴承充满黄油。因为在此装配在线需要装配不同尺寸的滚珠轴承,黄油压床的冲程速度须为可以调整。
控制顺序: 操作阀1.2(起动)使阀1.1在Z 接转。气缸1.0(A)外伸,压紧滚珠轴承。在气缸的外端点位置,操作阀1.12/2.2及因此通过梭动阀1.4使控制链1被自动保持。在同时一个讯号 送入阀2.1的Z 。使气缸2.0(B)外伸至前端点位置。操作阀2.3后开始回行运动。在阀1.9、阀2.3及1.7使回动阀1.5/2.6接转前,气缸2.0(B)继续产生摆动运动。压缩空气进入作动组件2.1的Y 。气缸2.0(B)回行至后端点位置。空气进入阀1.5/2.6及阀1.3/l.6的Z,使阀1.1排放。气缸1.0(A)再度回到后端点位置。阀1.8及1.10联合成为一安全措施。当气缸1.0(A)完全缩回时才能开始新的循环。 7.4 冲口器 夹持器在工件的孔端冲三个开口。 该设备的工作原理如图7.8所示。用手将工件放在夹持器内。起动讯号使气缸1.0(A)移送冲模进入长方形工件内。自此以后,气缸2.0(D)、3.0(C)及4.0(D)一个接一个推动冲头在工件孔内冲开口。在气缸4.0(D)的最后冲口操作完成后,所有三个冲糙气缸2.0(B )、3.0(C)及4.0(D)返回至它们的起始位置。气缸1.0(A)从工件抽回冲模,完成最后的运动。用手将已冲口工件从夹持器上拿出。该设备的位移一步骤图如图7.9所示,动作顺序如表7.2所示。
flac3D基础与工程实例命令
2-1 new gen zon bri size 3 3 3 model elas prop bulk 3e8 shear 1e8 ini dens 2000 fix z ran z -.1 .1 fix x ran x -.1 .1 fix x ran x 2.9 3.1 fix y ran y -.1 .1 fix y ran y 2.9 3.1 set grav 0 0 -10 solve app nstress -10e4 ran z 3 x 1 2 y 1 2 hist gp vel 0 0 3 hist gp vel 0 3 3 plo hist 1 red plo add hist 2 blue solve 3-1 ;-------------------------------------工程信息 ;Project Record Tree export ;Title:Simple test ;---------------------------------计算第一步 ;... STATE: STATE1 .... config grid 10,10 model elastic group 'User:Soil' notnull model elastic notnull group 'User:Soil' prop density=1500.0 bulk=3E6 shear=1E6 notnull group 'User:Soil' fix x y j 1 fix x i 1 fix x i 11 set gravity=9.81
history 999 unbalanced solve save state1.sav ;----------------------------------计算第二步 ;... STATE: STATE2 .... initial xdisp 0 ydisp 0 initial xvel 0 yvel 0 model null i 4 7 j 8 10 group 'null' i 4 7 j 8 10 group delete 'null' history 1 xdisp i=4, j=11 solve save state2.sav ;--------------------------------绘图命令 ;*** plot commands **** ;plot name: syy plot hold grid syy fill ;plot name: Unbalanced force plot hold history 999 ;plot name: grid plot hold grid magnify 20.0 lred grid displacement ;plot name: Xdis-A plot hold history 1 line
运筹学案例集
运筹学案例集 常州宝菱重工机械有限公司孔念荣收集整理 运筹学的一些典型性应用 ?合理利用材料问题:如何在保证生产的条件下,下料最少 ?配料问题:在原料供应量的限制下,如何获取最大收益 ?投资问题:从投资项目中选取最佳组合,使投资回报最大 ?产品生产计划:合理利用人力、物力、财力等,使获利最大?劳动力安排:用最少的劳动力来满足工作的需要 ?运输问题:如何制定最佳调运方案,使总运费最少 一、生产计划问题 案例1(2-4)、某工厂用A、B、C、D四种原料生产甲、乙两种产品,生产甲和乙所需各种原料的数量以及在一个计划期内各种原料的现有数量见下表所示。又已知每单位产品甲、乙的售价分别为400元和600元,问应如何安排生产才能获得最大收益? 已知生产单位产品所需的设备台时及A、B两种原材料的消耗、资源的限制,如下表:
问题:工厂应分别生产多少单位Ⅰ、Ⅱ产品才能使工厂获利最多? 案例3(2-25)、某公司面临一个是外包协作还是自行生产的问题。该公司生产甲、乙、丙三种产品,都需要经过铸造、机加工和装配三个车间。甲、乙两种产品的铸件可以外包协作,亦可以自行生产,但产品丙必须本厂铸造才能保证质量,数据如下表所示。 问题:公司为了获得最大利润,甲、乙、丙三种产品各生产多少件?甲、乙两种产品的铸造中,由本公司铸造和由外包协作各应多少件? 案例4(2-28)、永久机械厂生产Ⅰ、Ⅱ、Ⅲ三种产品,均要经过A、B两道工序加工。设有两种规格的设备A1、A2能完成A工序;有三种规格的设备B1、B2、B3能完成B 工序。Ⅰ可在A、B的任何规格的设备上加工;Ⅱ可在任意规格的A设备上加工,但对B工序,只能在B1设备上加工;Ⅲ只能在A2与B2设备
FLAC3D命令流(整理版)
1、怎样查看模型? 答:plot grid 可以查看网格,plot grid num 可以查看节点号。 2、请问在圆柱体四周如何施加约束条件? 答:可以用fix ... ran cylinder end1 end2 radius r1 cylinder end1 end2 radius r2 not,其中r2 目录 应用实例1.自动调节病床 (2) 应用实例2.软床垫耐久性试验机 (4) 应用实例3.自动传输带 (6) 应用实例4.印花机 (8) 应用实例5.自动钻床 (10) 应用实例6.插销分送机构 (13) 应用实例7.垃圾集装压实机 (15) 应用实例8. 自动物料输送 (17) 应用实例1.自动调节病床 在医院的住院病人中,有一些是行动不便的,特别是大小便需要有人照料。自动调节病床为这类病人解决了难题,病人只需轻轻压下一个按钮,便桶就可以从床下自动移至对病人合适的位置,用完后病人只需松开按钮,便桶就可以移回原位,如图 1 所示。 图1自动调节病床 自动调节病床由两只气缸控制,水平气缸 A 使便桶水平移动,垂直气缸 B 使可动床垫移开或复位。操作步骤如下:当病人压下按钮时,气缸 B 后退,退到底后,A 气缸退回,便桶到位;当病人松开按钮时,气缸 A 前进,进到头后,B 气缸上升,便桶、床垫恢复原位。控制系统如图 2 所示,b0 为 B 气缸退到底后的行程开关,a1 为 A 气缸伸到前端的行程开关,只有当 B 气缸将b0 压下后,A 气缸才能退回,另外只有当 A 气缸压下a1 后,B 气缸才能顶出。 图2自动调节病床气动控制系统 应用实例2.软床垫耐久性试验机 试验对象为软床垫,试验要求两个一定形状和质量的模块,从规定的高度以一定频率交替加载,以模拟日常使用条件,检验软床垫对长期重复性载荷的承载能力,试验机如图3所示。 图3软床垫耐久性试验机 气缸A、B 带动两个模块,上下交替加载,其顺序动作为:A1 T1 A0 T2 B1 T1 B0 T2,每次动作间隔需延时T1,自动循环加载,自动计加载次数,计数到达设定值后,自动停止,位置流程图如图4: 图4软床垫耐久性试验机位置流程图 采用步进模块对系统进行设计,如图5,计数信号为w1、w2,由两只延时阀实现动作间隔延时,启动时同时对步进模块总复位,计数器可进行预先置数,当达到设定值时发出停 《FLAC/FLAC 3D基础与工程实例》全部命令流 1 gen zone bri p0 0 0 0 p1 10 0 0 p2 0 10 0 p3 0 0 10 & p4 15 15 0 p5 0 15 15 p6 15 0 10 p7 20 20 20 & size 10 10 10 rat 1.0 0.9 1.1 group brick_1 gen zone bri p0 20 0 0 p1 add 10 0 0 p2 add 0 20 0 p3 add 0 0 15 & size 10 10 10 rat 1.0 0.9 1.1 group brick_2 gen zone bri p0 40 0 0 edge 10 size 10 10 10 rat 1.0 0.9 1.1 group brick_3 plot sur 2-1 new gen zon bri size 3 3 3 model elas prop bulk 3e8 shear 1e8 ini dens 2000 fix z ran z -.1 .1 fix x ran x -.1 .1 fix x ran x 2.9 3.1 fix y ran y -.1 .1 fix y ran y 2.9 3.1 set grav 0 0 -10 solve app nstress -10e4 ran z 3 x 1 2 y 1 2 hist gp vel 0 0 3 hist gp vel 0 3 3 plo hist 1 red plo add hist 2 blue solve 3-1 ;-------------------------------------工程信息 ;Project Record Tree export ;Title:Simple test ;---------------------------------计算第一步 ;... STATE: STATE1 .... config grid 10,10 model elastic group 'User:Soil' notnull model elastic notnull group 'User:Soil' prop density=1500.0 bulk=3E6 shear=1E6 notnull group 'User:Soil' fix x y j 1 fix x i 1 fix x i 11 set gravity=9.81 history 999 unbalanced solve save state1.sav ;----------------------------------计算第二步 ;... STATE: STATE2 .... initial xdisp 0 ydisp 0 initial xvel 0 yvel 0 model null i 4 7 j 8 10 group 'null' i 4 7 j 8 10 group delete 'null' history 1 xdisp i=4, j=11 solve save state2.sav ;--------------------------------绘图命令 ;*** plot commands **** ;plot name: syy plot hold grid syy fill ;plot name: Unbalanced force plot hold history 999 ;plot name: grid plot hold grid magnify 20.0 lred grid displacement ;plot name: Xdis-A plot hold history 1 line 5-1 new ; =============================== ; 定义球体半径和半径方向上单元网格数 ; =============================== def parm rad=10.0 rad_size=5 end parm ; =============================== ; 建立八分之一球体外接立方体网格 1、1 换向回路 单作用气缸控制回路气缸活塞杆运动的一个方向靠压缩空气驱动,另一个方向则靠其她外力,如重力、弹簧力等驱动。回路简单,可选用简单结构的二位三通阀来控制 常断二位三通电磁阀控制回路 通电时活塞杆伸出,断电时 靠弹簧力返回 常通二位三通电磁阀控制回路 断电时活塞杆缩回,通电时 靠弹簧力返回 三位三通电磁阀控制回路 控制气缸的换向阀带有全封闭 型中间位置,可使气缸活塞停止在任 意位置,但定位精度不高 两个二位二通电磁阀代替一个二位三 通阀的控制回路 两个二位二通电磁阀同时通电换 向,可使活塞杆伸出。断电后,靠外力 返回 双作用气缸控制回路 气缸活塞杆伸出或缩回两个方向的运动都靠压缩空气驱动,通常选用二位五通阀来控制 采用单电控二位五通 阀的控制回路 通电时活塞杆伸出,断电时 活塞杆返回 双电控阀控制回路 采用双电控电磁阀,换向信号 可以为短脉冲信号,因此电磁铁 发热少,并具有断电保持功能 中间封闭型三位五通阀控制回路 左侧电磁铁通电时,活塞杆伸出。 右侧电磁铁通电时,活塞杆缩回。左、 右两侧电磁铁同时断电时,活塞可停 止在任意位置,但定位精度不高 中间排气型三位五通阀控制回路 当电磁阀处于中间位置时活塞 杆处于自由状态,可由其她机构驱 动 中间加压型三位阀控制回路电磁远程控制回路 采用二位五通气控阀作为主控 阀,其先导控制压力用一个二位三通 电磁阀进行远程控制。该回路可以应 用于有防爆等要求的特殊场合 双气控阀控制回路 主控阀为双气控二位五通阀, 用两个二位三通阀作为主控阀的先 导阀,可进行遥控操作 当左、右两侧电磁铁同时断 电时,活塞可停止在任何位置,但 定位精度不高。采用一个压力控 制阀,调节无杆腔的压力,使得在 活塞双向加压时,保持力的平衡 采用带有双活塞杆的气缸,使活 塞两端受压面积相等,当双向加压时, 也可保持力的平衡 《FLAC 原理实例与应用指南》FLAC3D 实例分析教程 1 FLAC3D 实例分析教程 刘波韩彦辉(美国)编著《FLAC 原理实例与应用指南》 北京:人民交通出版社,2005.9 Appendix(附录) 版权所有:人民交通出版社,Itasca Consulting Group, USA 说明: 1.本实例分析教程是为方便读者学习、应用FLAC 和 FLAC3D 而编写的,作为《FLAC 原理、实例与应用指南》一书的 附录。 2.计算算例参考了Itasca Consulting Group 的培训算例,命 令流的解析旨在方便读者理解FLAC 和FLAC3D 建模及求解问题的一般原则与步骤。 3.实例分析的算例中,FLAC 算例是基于FLAC 5.00 版本、FLAC 3D 算例是基于FLAC 3D 3.00 版本实现计算分析的。读者在学习和研究相关算例时,请务必采用Itasca 授权的合法版本进行分析计算。 4.本实例分析教程仅供读者参考,读者在参考本教程算例 进行工程分析时,编者对可能产生的任何问题概不负责。 编者 《FLAC 原理实例与应用指南》FLAC3D 实例分析教程 2 实例分析1:基坑开挖 图1:基坑开挖的位移等值线图 例1: ; simple tutorial – trench excavation ;简单的隧道开挖方法 ; Step 1: create initial model state ;第一步:初始模型的建立 ; create grid ; 建立网格 gen zone brick size 6 8 8 ;建立矩形的网格区域,其大小为6×8×8 ; assign material ;指定材料的性质 model mohr ;采用摩尔-库仑模型 prop bulk 1e8 shear 0.3e8 ;模型的材料性质:体积模量1×108 剪切模量0.3×108 prop fric 35 coh 1e3 tens 1e3 ;摩擦角35°粘聚力1×103 抗拉强度1×103 ; set global conditions ;设置全局参数 set grav 0,0,-9.81 《FLAC 原理实例与应用指南》FLAC3D 实例分析教程 3 ;设置重力加速度,z 坐标正方向为正,故为-9.81 ini dens 2000 ;初始密度为2000 ; set boundary conditions ;设置初始边界情况 fix x range x -0.1 0.1 ;在x 方向上固定x = 0 边界,为滚动支撑 fix x range x 5.9 6.1 ;在x 方向上固定x = 6 边界,为滚动支撑 fix y range y -0.1 0.1 ;在y 方向上固定y = 0 边界,为滚动支撑 fix y range y 7.9 8.1 ;在y 方向上固定y = 8 边界,为滚动支撑 fix z range z -0.1 0.1气动工程应用案例(8个)
陈育民《FLAC3D基础与工程实例》全部命令流
基本气动回路
FLAC原理实例与应用指南FLAC3D实例分析教程