交叉口冲突数的计算
【干货精品】城市道路交叉口视距三角形研究—交叉口规范解读

城市道路交叉口视距三角形研究为了保证交叉口上行车安全,驾驶员在进入交叉口前的一段距离内,应能看到相交道路上的行车情况,以便能及时采取措施顺利驶过或安全停车。
这段必要的距离应该大于或等于停车视距。
但是视距设计,往往被设计人员忽视,交叉口设计结束后,很少有设计人员进行视距计算。
这就有可能造成交叉口范围内视距不佳,可能引起交通事故。
因此,在交叉口设计中,必须要进行视距计算,视距通视区内的中分带、侧分带及道路两侧不能有高度超过1.2m的障碍物,从而增加交叉口的安全性。
《城市道路交叉口设计规程》(CJJ 152-2010)对交叉口视距三角形要求的停车视距作了具体规定,但是没有考虑交通组织方式。
实际上,交通组织方式不同,对视距的要求也不同。
3.1 无信号控制交叉口视距设计无信号控制交叉口,各进口道的车辆运行没有主次之分,路权平等,所有驶入车辆均有避让交叉口内已有车辆的义务。
视距三角形的确定步骤如下:(1)按《城市道路交叉口设计规程》(CJJ 152-2010)表4.3.3确定停车视距。
(2)找出行车最危险冲突点:①对十字形交叉口,最危险的冲突点为最靠右侧第一条直行机动车道的轴线与相交道路最靠中心线的第一条直行车道的轴线所构成的交叉点。
②对于T形(或Y形)交叉口,最危险的冲突点为直行道路最靠右侧第一条直行车道的轴线与相交道路最靠中心线的一条左转车道的轴线所构成的交叉点。
(3)从最危险的冲突点向后沿行车轨迹线各量取停车视距。
(4)连接末端构成视距三角形。
图3 视距三角形示意图3.2 停让控制交叉口视距设计我国的城市道路与公路的设计规范,均没有对停让控制交叉口的视距作具体规定。
文献[2]引用了美国停让控制交叉口视距的理论基础、计算过程和设计值,下面简要介绍。
(1)次路左转和右转视距三角区在停让控制交叉口中,主路车辆拥有优先通行权,次路车辆只能等待主路车辆间距足够大的间隙时进入或驶离交叉口。
次路右转时,必须等到合适的主路车辆间隙,即要求次路车辆必须能看见在主路上身后第一辆车,次路左转也要满足这样的要求。
无信号交叉口理论PPT课件

qptf
1qp(eqptf
1)Dmin
qp(eqptf 1)Dmin
如果排队车辆服从几何分布,则亚当斯延误,即 次要车流经历的最小平均延误:
e(tctm ) D mi n qp
tc1tm 22 (t2 m tm 2)tm
-
25
(2) 用排队系统求解平均延误
对于M/G/1排队系统,可用P-K(PollaczekKhintchine)公式计算排队中用户的平均延误:
n0
式中:Pn(t)—n辆次要车流车辆进入持续时间为t的主要车流
间隙的概率
1, Pn(t) 0,
tc(n1)tf
ttcnft 其他
qm
qp
eqptc 1eqptf
-
20
另一种假设g(t)为连续线性函数:
0, g(t) t t0 ,
t f
t t0 t t0
式中:t0=tc-tf/2
qm
1 qpt f
P0=y/v
(10.48)
P0 (10.46)- (10.48)
-
29
不同队列长度分布对平均延 误的影响,这里假设tc=4s, tf =2s
平均延误—平均队列长度, 当队列长度变化时延误会有 显著的差异。
-
30
3. 排队长度
在任何排队理论中,平均排队长度(L)都可由 利特尔(Little)原则计算出:
的平均延误
Dq
xW(1Cw2) 2(1x)
式中:W—平均服务时间,即次要街道车辆在第
一个排队位置所花费的平均时间;
Cw—服务时间偏差系数
Cw
Var(W) W
Var(W)—服务时间的方差
次要街道车辆总平均延误时间为:
城市道路平面交叉口设计

三、交叉口设计的基本要求和内容 1.交叉口设计的主要内容 1)正确选择交叉口型式,合理确定各组成部分的几何 尺寸; 2)进行交通组织,合理布置各种交通设施; 3)验算交叉口行车视距,保证安全通视条件; 4)交叉口立面设计,布置雨水口和排水管道;
精选课件
平交口的设计范围
精选课件
三、交叉口设计的基本要求和内容
精选课件
1.进口道车道的划分
(2)掉头车道 在长路段上,为满足车辆掉头的需要,当中央分隔带宽
度 不 低 于 4m 时 , 可 在 交 叉 口 人 行 道 之 前 设 置 掉 头 通 道 (见下图),当中央分隔带宽小于4m,掉头车辆可利用 左转车信号掉头。
精选课件
2.交叉口拓宽车道的设计
当交叉口车行道的宽度不足时,为了提高交叉口的通 行能力,常采用向道路的一侧或两侧拓宽的办法,增辟左、 右转专用车道。交叉口拓宽车道的设计主要解决拓宽车道 的设置条件、设置形式和拓宽长度三个方面。
行驶,应对最小转弯半径加以限制。在右转车辆计算行车速 度已确定的条件下,取μ=0.16~0.20,最小圆曲线半径的 一般值采用ih=2%计算,极限值用ih=6%计算。
精选课件
(二)分道转弯式交叉口最小圆曲线半径 ▪ 当右转弯车辆比较多时,为保证右转车辆能以规定速度分道
行驶,应对最小转弯半径加以限制。在右转车辆计算行车速 度已确定的条件下,取μ=0.16~0.20,最小圆曲线半径的 一般值采用ih=2%计算,极限值用ih=6%计算。
机动车冲突区 机动车、非机动车冲突区 机动车、行人冲突区 非机动车、行人冲突区
精选课件
3。交叉口交通状态总结:
结论1:在没有交通管制的交叉口,都存在各种冲突点, 其数量随着相交道路条数的增加而显著增加,其中增加 最快的是冲突点。
第二章交通信号控制的基本理论
2交通信号控制的基本理论本章首先给出了交通信号控制的基本概念,包括:信号相位,周期时长,绿信比,相位差,绿灯间隔时间,有效绿灯时间等,然后介绍了常用的交叉口性能指标以及计算方法,最后给出了常用交叉口的信号配时方法。
这些研究为后面的信号配时模型及优化方法的研究奠定了理论基础。
2.1交通控制的基本概念交叉路口信号配时参数优化,首先必须准确把握和理解交通控制中的一些基本概念。
下面对信号配时设计中部分参数作一介绍。
(l)信号相位:在一个信号周期内,具有相同的信号灯色显示的一股或几股交通流的信号状态序列称作一个信号相位。
信号相位是按车流获得信号显示的时序来划分的,有多少种不同的时序排列,就有多少个信号相位。
每一个控制状态,对应显示一组不同的灯色组合,称为一个相位。
简而言之,一个相位也被称作一个控制状态。
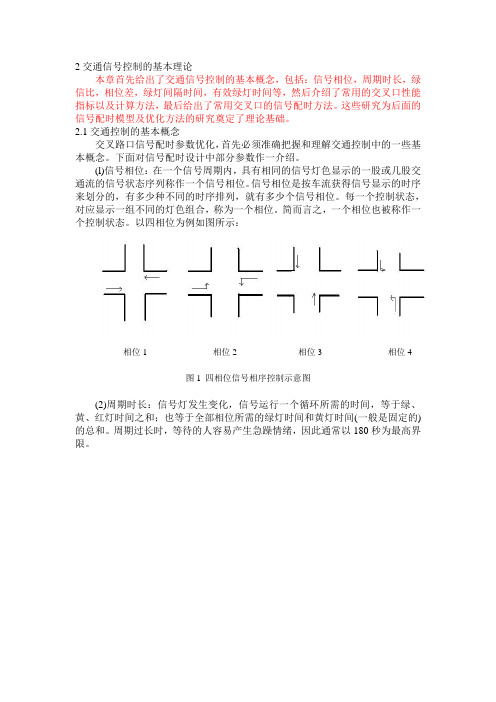
以四相位为例如图所示:相位1 相位2 相位3 相位4图1 四相位信号相序控制示意图(2)周期时长:信号灯发生变化,信号运行一个循环所需的时间,等于绿、黄、红灯时间之和;也等于全部相位所需的绿灯时间和黄灯时间(一般是固定的)的总和。
周期过长时,等待的人容易产生急躁情绪,因此通常以180秒为最高界限。
图1 第一、三配时表(3)绿信比:是指在一个周期内(对一指定相位),有效绿灯时间与信号周期长度之比。
(4)相位差(又叫绿时差或绿灯起步时距):相位差是针对两个信号交叉口而言,是指两个相邻交叉口它们同一相位绿灯(或红灯)开始时间之差。
它分为绝对相位差和相对相位差。
相对相位差是指在各路口的周期时间均相同的联动信号系统中,相邻两个交叉路口协调相位的绿灯起始时间之差。
绝对相位差是指在联动信号系统中选定一标准路口,规定该路口的相位差为零,其他路口相对于标准路口的相位差叫绝对相位差。
(5)绿灯间隔时间:是指从失去通行权的相位的绿灯结束,到下一个得到通行权的相位绿灯开始所用的时间。
绿灯间隔时间的长短主要取决于交叉口的几何尺寸,因此,要确定该时间的长度就必须首先考虑停止线和潜在冲突点之间的相关距离,以及车行驶这段距离所需的时间。
浅谈Y型交叉口的交通组织设计

浅谈Y型交叉口的交通组织设计摘要:随着我国经济建设的快速发展,城市交通量迅速增长,交通出现了日趋紧张的局面,拥堵经常发生,整个城市的经济发展受到制约,缓解交通拥堵问题已迫在眉睫。
对于城市道路而言,交叉口是城市交通的关键。
本文从Y型交叉口的冲突点分析入手,对Y型交叉口的改造设计方案作一研究,这对于正确合理地进行交叉口渠化设计和交通组织,以及充分发挥道路网整体交通功效具有重要的意义。
关键词:城市道路;Y型交叉口;改造设计;Abstract: With the rapid development of China economy, the rapid growth of the volume of city traffic, traffic became more serious situation, congestion often occurs, the whole city economy development is restricted, alleviate traffic jam has been imminent. For city roads, city traffic intersection is the key. This article from the Y intersection point of conflict analysis, the Y intersection modification design for a study, this to correctly and reasonably intersection canalization design and traffic organization, and give full play to the overall efficiency of road network traffic has important significance.Key words: city road; Y intersection; transformation design引言城市道路是城市这个有机体的骨架,是城市生产与生活的大动脉,是城市各要素的连接纽带。
城市道路与交通-第七章
二.行人交通组织
3.人行横道的设置
⑴.位置:人行横道一般布置在交叉口人行 道的延续方向后退4—5米的地方 ⑵.宽度:一般应比路段人行道宽些(4—8 米)。 ⑶.停车线的位置:应布置在人行横道线后 至少1米的地方。
本章主要介绍道路平面交叉口设计的基本理
论和方法。学习平面交叉口平面布置和立面
设计方法.
2021/8/13
1
第一节 交叉口设计概述
一、交叉口设计的基本要求和内容
定义:道路与道路(或铁路)在同一平面上相交的地方称为平 面交叉,又称为交叉口。 交叉口设计的主要内容:
(1)正确选择交叉口的形式,确定各组成部分的几何尺寸; (2)进行交通组织,合理布置各种交通设施; (3)验算交叉口行车视距,保证安全通视条件; (4)交叉口立面设计,布置雨水口和排水管道。
中间的一至两条作为交织
之用。
77
3.环道的宽度:环道通常三车道
三.交织角
1.交织角—进环车辆轨迹与出环车辆轨迹的平均相交 角度。 2.交织角与行车安全:交织角越大,交织段长度越小, 行车越不安全。交织角越小,交织段长度越大,行车越 安全。 3.交织角一般在20°-30°之间
78
四. 环道的横断面
61
(2)不扩宽进口道,占用靠近中心线的对向车 道作为左转车道。
62
二、拓宽车道的长度
1、右转车道 的长度
⑴.渐变段长度ld ⑵.减速所需长度lb和加速所需长度la ⑶.等候车队长度
无信号十字交叉口交通流冲突模型研究
第3 3卷 , 2期 第
200 8年 4 月
公 路 工 程
Hi h y En i e rng g wa gn e i
V0 . 3.No 2 13 . Ap r.,200 8
无 信 号 十 字 交 叉 口 交通 流 冲 突 模 型 研 究
会跟 随前进 , 因此形 成 了间歇性 的车流 、 人流 。 行
很多 经典 的交叉 口冲突分 析计算 方法是建 立在 间隙理论 基础上 , 即假 设 主要道 路 车 流有 优 先通 行 权, 无任何 延误 , 次要道 路车流 只能利 用主要道 路车
域 ) 。
1 机 动 车 冲突 模 型
1 1 模 型 建 立 .
根据 跟驰 理 论 , 车辆 通行 和行 人 过街 都具 有 传 递性 , 当第 一辆车 改变运行 状态 时 , 的效 应将会 一 它 辆接 一辆地 向后 传 递 , 至最 后 一辆 , 当 领 头 直 即 的车辆或者 行人 向前 移动 时 , 跟 的 车辆 或行 人 就 紧
孙 凤 英 , 程 远 毛
( 北林 业 大 学 交 通 运 输 工 程学 院 ,黑龙 江 哈 尔 滨 104 ) 东 5 00
[ 摘 要 ]无信 号 十字 交 叉 口的交 通 流 冲突 , 仅 体 现 在 机 动 车与 机 动 车 之 问 , 人 和 机 动 车 之 问 的 冲突 也 很 不 行
Un in l e o sn sg ai d Cr si g s
SUN ng i Fe y ng,M AO Che y n ng ua
( rf cC l g ,N rh E s F rsr ie sy,Habn,Heln j n 0 0,C ia T a i ol e ot at oet Unv ri e y t ri i gi g,1 0 4 o a 5 hn )
城市道路与交通第6章交叉口1
第一节 平面交叉口
三.交叉口设计
4、平面交叉口的交通组织
●绿信比
绿信比即在一个周期内显示的绿灯时间与周期长之比,
用百分比(%)表示。
根据美国得克萨斯交通研究所的研究,对于分道行驶的
交叉口,可以通过下列公式来确定绿灯时间长短。
n入
T绿 H
D
2
式中:n入 绿灯时间内从某个车道进入交叉口的车辆数; D 车队中头两个车辆进入交叉口所需要的时间;
第一节 平面交叉口
三.交叉口设计
3、交叉口缘石半径
交叉口转角处的缘石应做成圆曲线或多圆心复曲线,以符合 相应车辆行驶的轨迹,通常多采用圆曲线。
圆曲线的半径R1称为缘石半径。 1. 交叉口转角的缘石半径值根据下列几个方面因素考虑:
(1) 缘石半径取值应满足交叉口转弯车辆的最小半径。 (2)根据相交道路等级取用半径,通常正交十字交叉口下表 采用。
第一节 平面交叉口
三.交叉口设计
3、交叉口缘石半径 (3) X型、Y型斜交型交叉口缘石半径应视交叉口交角形
状选用,在保证视距前提下,锐角的半径值宜小,钝角处 半径值宜大,以利车辆行驶。
(4)城市道路旧街进口道为一车道的,应适当加大缘石半 径,以便扩大停车线断面附近车行道路宽度,减少阻塞。
2. 交叉口缘石半径应以右转弯计算行车速度验算,计算 公式如下:
用五岔口,但也不宜用六、七条道路相汇的交叉口。
◆在道路网规划时不轻意地设计成错位的丁字交叉口。
◆交叉口相交道路之间的夹角宜较均匀,应使互相交叉 的交通流成直角或接近直角相交,夹角一般大于75,最小 不应小于45。
第一节 平面交叉口
二.平面交叉口车流的矛盾
3、机动车与非机动车之间的冲突 只有机动车的交叉口,在红灯下,使横向的车辆停驶,
信号配时设计
“上海方法”信号配时设计到目前为止,定时信号的配时方法在国际上主要有英国的TRRL 法(也称Webster 法)、澳大利亚的ARRB 法以及美国的HCM 法等。
在我国有 “停车线法”和“冲突点法”等方法。
随着研究的不断深入,定时信号的配时方法也在进一步的改进之中。
这里,在综合研究英国、澳大利亚和美国等国家以及我国现有的配时方法的基础上,结合我国城市交通的特点,讨论定时信号配时的基本方法。
1.定时信号配时设计流程单个交叉口定时交通信号配时设计,要按照不同的流量时段来划分信号配时的时段,在同一时段内确定相应的配时方案。
改建、治理交叉口,具有各流向设计交通量数据时,信号配时设计的流程如图1所示。
2.确定信号相位基本方案1)对于新建交叉口,在缺乏交通量数据的情况下,十字交叉口,建议先按表1所列进口车道数与渠化方案选取初步试用方案;T 形交叉口,建议先用三相位信号;然后根据通车后实际交通各流向的流量调整渠化及信号相位方案。
2)交通信号相位设定在设定交通信号相位时,应遵循以下原则:(1)信号相位必须同交叉口进口道车道渠化(即车道功能划分)方案同时设定;(2)信号相位对应于左右转弯交通量及其专用车道的布置,常用基本方案示于图2;(3)有左转专用车道时,根据左转流向设计交通量计算的左转车每周期平均到达3辆时,宜用左转专用相位。
(4)同一相位各相关进口道左转车每周期平均到达量相近时,宜用双向左转专用相位,否则宜用单向左转专用相位。
3.确定设计交通量确定设计交通量时,应按交叉口每天交通量的时变规律,分为早高峰时段、下午高峰时段、晚高峰时段、早、晚低峰时段、中午低峰时段及一般平峰时段等各时段,然后确定相应的设计交通量。
已选定时段的设计交通量,须按该时段内交叉口各进口道不同流向分别确定,其计算公式如下:mn mn Q q d 154⨯= (1)式中:mn d q —— 配时时段中,进口道m 、流向n 的设计交通量(pcu/h) ;mn Q 15——配时时段中,进口道m 、流向n 的高峰小时中最高15分钟的流率(pcu/15min)。
城市道路交叉口设计要素分析
城市道路交叉口设计要素分析摘要:城市道路交叉口是城市道路交通系统的重要节点,是交通流转向的重要场所,但同时也是道路拥堵和事故的多发点,交叉口设计是城市道路设计的关键点之一。
本文通过对城市道路交叉口设计要素的分析,总结交叉口设计的方法及参数选择,为今后城市道路交叉口设计、分析研究城市道路拥堵和事故发生提供技术指导。
关键字:城市道路;交叉口设计;设计要素;要素分析。
1引言城市道路设计中往往会遇到与横向道路相交的交叉口设计,交叉口周边情况复杂,线形交错,交叉口内交通流转向冲突点较多,极易引发交通拥堵和交通安全事故。
因此对于城市道路交叉口应进行科学合理的规划设计,优化交叉口内的交通组织,提高交叉口的通行能力,保障行车安全。
因此本次从城市道路交叉口设计的要素分析入手,总结交叉口设计的方法,实现交叉口在交通安全、道路排水及景观方面的协调统一。
2交叉口设计要素分析(1)交叉形式的选择[1]城市道路平面交叉口应根据道路网、交通流量与流向及用地条件等进行交通组织设计。
交通组织设计应遵循人车分隔、机非分隔、各行其道;以人为本、公交优先;安全畅通、减少延误的原则。
按照城市道路相关设计规范,城市道路分为快速路、主干路、次干路、支路四个等级,城市道路交叉又分为平面交叉和立体交叉。
平面交叉口根据交通组织方式分为三类,分别为A类、B类、C类,平交口的选用类型见表1:表1 平面交叉口的选型平交口类型推荐类型可用类型主干路-主干路平A1类—主干路-次干路平A1类—主干路与支路平B1类平A1类次干路-次干路平A1类—次干路-支路平B2类平A1类或平B1类支路-支路平B2类或平B3类平C类或平A2类(2)交叉口平、纵面及竖向设计目前我国城市道路建设过程中城市交叉口的设计主要参照《城市道路交叉口设计规程》(CJJ152-2010)章节“4.3平面与竖向设计”中的相关规定。
城市道路设计时平面交叉口范围内的道路路线应以直线为主,需要采用曲线时,曲线半径应采用大于不设超高最小圆曲线半径规定的半径值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
道路交叉口冲突分析 摘要:交通冲突技术(Traffic Conflict Technique,TCT),属于一种新兴的定量研究各种道路交通安全问题极其对策的非事故评价方法。道路交叉口的评价方法主要包括直接评价和间接评价两种,本文尝试简述分析交通冲突的三种常用方法,并以上海市曹安公路—绿苑路交叉口为实例进行理论建模的分析。 关键词:道路交叉口 交通冲突 仿真 交通事故 交通量
0 引言 交通冲突是在可观测条件下,两个或两个以上道路使用者在同一时间、空间上相互接近,如果其中一方采取非正常交通行为,如转换方向、改变车速、突然停车等,除非另一方也相应采取避险行为,否则,会发生碰撞。交通冲突的发生量要比交通事故多的多,在某种意义上,交通事故同属于交通冲突的范畴,交通事故与交通冲突的成因及发生过程完全相似;两者之间的唯一区别在于是否存在损害后果。换言之,凡造成人员伤亡或车物损失的交通事件称为交通事故,否则称为交通冲突。 对交通冲突进行分类有利于对各种不同类型的冲突进行分析并采取相应应对措施,交通冲突有以下几种分类方法: (1)按照发生地点分,可分为路段交通冲突和交叉口交通冲突。路段交通冲突包括正向冲突、追尾冲突、横穿冲突和撞固定物冲突。交叉口交通冲突则包括左转弯冲突、右转弯冲突和穿越交通冲突。 (2)按照冲突对象分,主要可分为机动车之间的冲突、机动车与非机动车之间的冲突、机动车与行人之间的冲突等三种。 (3)按照冲突成因分,可分为突然停车、交织、追尾、减速、变道、红灯等,实际中某个冲突的成因可能是以上冲突成因的组合。 (4)按照交通危险事件的严重性,可分为严重冲突和非严重冲突两类。 我国交通冲突技术研究处于起步阶段,各种交通冲突的数据尚不健全,研究表明,影响驾驶员行车安全的诸多因素中,交通量大小直接决定驾驶员的心理紧张程度,影响着交通冲突、交通事故的高低。交通冲突、交通事故的产生与交通流特别是交通量有密切的关系,流量决定车流的车头时距分布,从而也决定了车辆的时间间隔,它对交通冲突的影响最为明显。各种类型的交通冲突、交通事故与相关交通流特别是交通量在逻辑上有内在的因果关系。 基于上述分析,本文将以实际调查的交通量数据作为基础,利用VISSM和SSAM模型进行冲突数的确定。 1 道路交叉口冲突分析技术 对道路交叉口交通冲突的分析处理方法包括三种,分别是实测调查、理论建模和仿真模拟。 1.1 实地调查 实测调查是通过对交叉口的实地考察,采集大量关于冲突点和冲突严重程度的数据,在此基础上进行统计回归分析。研究表明,大约有94%-95%的事故与人有关,驾驶员应负直接责任的事故占81%左右。因此,驾驶员行为在交通冲突发生过程中起着重要作用。在实地调查中,可对某一具体交叉口的驾驶员行为特征进行分析和量化,通过采集大量数据建立驾驶行为和交通冲突之间的回归模型。 1.2 理论建模 理论建模是建立基于交通量的交通冲突数学模型。该模型的基本假定是车流达到驶离规律服从泊松分布。国外一般认为,600pcu/h是泊松分布的临界流量,当单车道流量p<300pcu/h时,车辆到达规律服从泊松分布;当300基本服从泊松分布,有时服从负二项分布(因受上游交叉口影响);当400时,若计数间隔较大(不小于1min),则也服从泊松分布。 1.2.1 交通冲突的界定 在交叉口,车辆发生冲突的充要条件是两车流是冲突车流,且两冲突车流的车辆到达冲突点的时间差较小,通常称发生冲突时的最大时间差为临界间隔,即交叉口允许次要道路等待穿越车辆可以通过主要道路的最小间隙,用∆t(s)表示。根据经验,∆t(s)大致取值范围为6~10s。国外一般认为,临界间隔为6~7s。国内的实测表明,小车临界间隔为7.4s,卡车临界间隔为9.8s,卡车通过小车等待时,临界间隔为9.2s,小车通过卡车等待时,临界间隔为8.0s。取其平均值,则临界间隔为8.6s。在实际应用中,可根据具体情况适当取值。 设i(i=1,2,3,4)表示入口,j(j=1,2,3)表示流向,j=1,2,3分别表示直行车流、左转车流与右转车流。则ij 表示入口i的j车流。 设P(ij)表示车流ij在∆t时间内有车辆到达的概率, P0
(ij)表示车流ij
在∆t内没有车辆到达的概率,ij表示车流ij平均到达率。又设车流''ij与车流ij是冲突车流,则0()1()PijPij,''''0()1()PijPij。 所谓冲突是指在t内,两相冲突车流都有车辆到达;在t时间内的冲突次数是指车流ij等待车流''ij通过的车辆数(若车流''ij先通过冲突点)或车流''ij
等待车流ij通过的车辆数(若车流ij先通过冲突点)。 1.2.2 计算平均驶离率
设i( i=1,2,3,4)表示入口i的车辆到达率。入口1和入口3的直行与左转车在有效绿灯期间的平均驶离率为 4'
131/()ijiiji
(i=1,3;j=1,2);
入口2和入口4的直行与左转车在有效绿灯期间的平均驶离率为 4'
241/()ijiiji
(i=2,4;j=1,2)
由于右转车任何时候都放行,所以'33ii (i=1,2,3,4) 1.2.3 计算交通冲突发生概率 设车流ij与车流''ij相互独立,则冲突点( ij,''ij)在t时间内发生冲突的概率P(C)可分以下两种情况计算。
(1)若车流ij等待或减速,车流''ij正常行驶,则发生冲突的概率为
''1()()AijnnPCPijnP
式中,''ijnP——在t时间内有n辆车到达的概率。 根据假定,车辆到达服从泊松分布,则''''''(1)/ijnijijnPPn
式中,''ij——车流''ij在t时间内的平均到达车辆数。 由此可得, ''()()AijPCPij (2)若车流''ij等待或减速,车流ij正常行驶,则发生冲突的概率为 ''()()BijPCPij
以上两种情况都可能发生,因此以t内平均到达车辆数作为权值,则冲突点( ij,''ij)发生冲突的概率P(C)为 ''''()(()())/()ABijijijijPCPCPC
1.2.4 计算交通冲突发生次数 在t内冲突点( ij,i`j`)发生的冲突次数,且车辆驶离规律亦服从泊松分布,则 ''''
'''''2'2
(,)(1)(1)ijijttijijCijij
C为总的冲突次数,在交叉口,绿灯时间不是同时分配给每个入口,在此基础上进行推导,可得到交叉口每小时冲突次数TC为 411322413600[()()]/iiTCCCt
1.3 仿真模拟 仿真模拟则是利用仿真软件,根据交叉口实际情况对驾驶员行为等参数进行标定,继而进行统计回归分析。理论建模可以通过研究交通量与交通事故、交通冲突的关系,从而建立相关的交通冲突数学模型,以此对交叉口的交通冲突进行分析。本组选用的是仿真模拟,下面对该方法进行详细介绍。 根据经验,VISSM仿真在严重冲突识别的真实性、驾驶人的行为选择以避让冲突等方面存在较大优势,因此选用VISSM软件进行仿真模拟。仿真前,对交叉口的渠化设计、信号控制策略等进行实地考察以便仿真时对相关参数进行标定。然后利用VISSM软件进行建模、校准和验证,使其能够尽可能地反应交通流的运行状况,尤其要注意的是,从安全分析角度出发对转弯、变道、红灯停车与启动等状况下的驾驶人行为参数、优先控制参数、信号控制参数等进行校准。输出包含车辆速度、加速度等信息的轨迹曲线。得到轨迹曲线后,利用SSAM模型,对TTC(冲突时间—距离冲突发生的时间)和PET(遭遇时间—前车通过某个位置与后车通过某一位置时的时间差)进行设定,并通过运算分析得到TTC、PET、maxS(最大速度—整个冲突过程中两辆车速度的最大值)、DeltaS(相对速度—驾驶人采取避险措施瞬间两辆车的相对速度)、maxD(最大加速度—冲突过程中后车的最大加/减速度)等指标,验证冲突仿真得到的冲突数量、分布情况等,如果误差在允许范围内,可以进行方案的评价,否则利用非集计指标与空间分布情况校核VISSM的控制参数或者SSAM的阈值设定。该方法的具体流程如图1所示。
图1 冲突仿真流程 图1 交通冲突仿真流程 交通冲突技术广泛用于交通安全分析,但该方法还面临一下问题与挑战: 1) 交通冲突间接方法得到了一定的研究、应用与推广,但实际上仍然是一种事后的被动分析技术,没有与交通仿真技术实现有机融合以达到主动安全分析效果。 2) 人工观测冲突的主观性很强,不同的观测人员对冲突的感知和识别能力各不相同,导致观测结果往往因人而已。同时这种方法很难获得较全面地冲突相关信息,如冲突速度、相对冲突速度、冲突位置等。 3) 视频观测的代价较高,遮挡、相机抖动现象克服不易,数据处理的工作量大。 4) 交叉、追尾、车道变化冲突形成的机理不同,需要驾驶人采取的剧烈程度也不一样。 针对上述问题,利用VISSM仿真软件,整合安全间接分析模型(Surrogate