阵列信号处理答案
阵列信号处理的基本知识分析

加性噪声。
将整个阵列的输出信号写成矩阵形式为:
x(t ) As(t ) n(t )
A [a( ),, a( )] 为阵列流行矩阵、空间信 号方向矢量、阵列响应矩阵。
1 P
a( ) [1 e
1 P
j 2 d sin /
,, e
j 2 ( M 1 ) d sin /
式中L为阵列最大口径,F和 为信号中心频率 和该频率对应的波长。 远场假设 即辐射源到阵列的距离远大于阵列的最大口 径,从而入射到阵列的信号波前可近似为平 面波前(d ).
L2
入射信号统计特性 空间入射信号平稳且各态历经,可以用时 间平均代替集合平均。一般还假定各入射 信号统计独立。 E{s(t ) s (t )} diag{ ,, } 噪声统计特性 空时白高斯噪声;色噪声环境下需要稳健 的算法。 E{n(t )n (t )} I
阵元之间的互藕 有关因素:阵元之间的间距大小,系统工作 频段,采用的传感器类型等。 设所有阵元之间的藕合系数矩阵为C,则考 虑到阵元间互藕的阵列输出信号模型为:
x(t ) CAs (t ) n(t )
阵元位置 阵元测向的关键信息是空间信号入射到各阵 元的相对延迟相位,而这一相位依赖于阵元 之间的空间位置,阵元位置误差直接导致延 迟相位估计误差,从而影响信号参数估计。 阵列模糊 阵元间距大于 / 2 时,影响空间信号到达角 的可辨识性和确定性,需要解决阵列模糊问 题。
H 2 2 s1 sP
H 2
信号数目 属于信号检测问题(AIC,MDL,etc),一般 假定先验已知。
二、阵列信号处理的主要内容
信号参数估计(DOA,频率,极化参数,距离, 时延等): 谱估计方法(子空间方法,波束形成 方法),参数化方法(最大似然,基于子空间逼 近方法)。
阵列信号处理
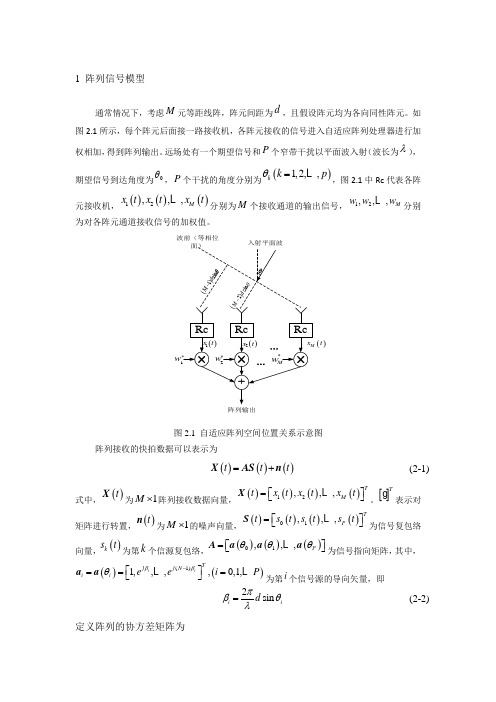
1 阵列信号模型通常情况下,考虑M 元等距线阵,阵元间距为d ,且假设阵元均为各向同性阵元。
如图2.1所示,每个阵元后面接一路接收机,各阵元接收的信号进入自适应阵列处理器进行加权相加,得到阵列输出。
远场处有一个期望信号和P 个窄带干扰以平面波入射(波长为λ),期望信号到达角度为0θ,P 个干扰的角度分别为()1,2,,k k p θ= ,图2.1中Rc 代表各阵元接收机,()()()12,,,M x t x t x t 分别为M 个接收通道的输出信号,12,,,M w w w 分别为对各阵元通道接收信号的加权值。
()t w 阵列输出波前(等相位图2.1 自适应阵列空间位置关系示意图阵列接收的快拍数据可以表示为()()()t t t =+X AS n(2-1)式中,()t X 为1M ⨯阵列接收数据向量,()()()()12,,,TM t x t x t x t =⎡⎤⎣⎦X 。
[]T表示对矩阵进行转置,()t n 为1M ⨯的噪声向量,()()()()01,,,TP t s t s t s t =⎡⎤⎣⎦S 为信号复包络向量,()k s t 为第k 个信源复包络,()()()01,,,P θθθ=⎡⎤⎣⎦A a a a 为信号指向矩阵,其中,()()(1)1,,,,0,1,i iTj j N i i e e i P ββθ-⎡⎤===⎣⎦a a 为第i 个信号源的导向矢量,即2sin i i d πβθλ=(2-2)定义阵列的协方差矩阵为()()2H H x s n E t t σ⎡⎤==+⎣⎦R X X AR A I (2-3)式中,()()H s E t t ⎡⎤=⎣⎦R S S 为信号的协方差矩阵,I 为M 维单位矩阵,2n σ为阵元的噪声功率,本文中约定,[]T表示转置,[]*表示共轭,[]H表示共轭转置。
式(2-3)常由接收数据采样协方差矩阵ˆx R 代替,即()()11ˆNH xiii t t N==∑R x x(2-4)如图2.1所示的自适应阵列模型,阵列的M 个通道接收信号经加权处理后,最后的输出信号为()()()1MH i i i y t w x t t *===∑w x(2-5)阵列的方向图()p θ定义为()()H p θθ=w a(2-6)调整自适应阵列的权矢量w ,可以改变阵列的方向图,即改变各个方向上入射信号增益。
阵列信号处理 psf 点扩散函数 反卷积

阵列信号处理(Array Signal Processing)1. 简介阵列信号处理是一种利用多个传感器或微phones接收到的信号进行处理的技术。
这些传感器通常以阵列的形式排列在一起,可以在空间上对信号进行采样。
阵列信号处理技术可以用于各种应用,包括无线通信、雷达、声音定位和语音增强等领域。
在阵列信号处理中,经常会使用到点扩散函数(Point Spread Function,PSF)和反卷积(Deconvolution)等概念。
本文将详细介绍这些特定函数的定义、用途和工作方式。
2. 点扩散函数(Point Spread Function,PSF)2.1 定义点扩散函数(PSF)是指在观察到一个点源时,系统输出的响应。
点源可以是一个理想的点光源、点声源或点热源等。
PSF描述了系统对于一个点源的感知能力,可以用于评估系统的分辨率和信号传输特性。
2.2 用途PSF在阵列信号处理中具有广泛的应用,主要用于以下几个方面:2.2.1 分辨率评估PSF可以用于评估系统的分辨率,即系统能够分辨并显示的最小特征尺寸。
通过分析PSF的形状和尺寸,可以确定系统的分辨率限制,进而优化系统设计和参数设置。
2.2.2 反卷积PSF还可以用于图像或信号的反卷积处理。
在实际应用中,由于传感器和系统的限制,观测到的信号往往受到模糊和失真的影响。
通过将观测到的信号与PSF进行卷积运算的逆过程,可以恢复出原始信号的更清晰的图像或声音。
2.2.3 信号重构PSF在阵列信号处理中也可以用于信号重构。
通过对多个传感器接收到的信号进行处理和分析,可以利用PSF将信号的不同成分分离出来,从而实现信号的重构和定位。
2.3 工作方式PSF的工作方式可以通过以下几个步骤来理解:2.3.1 系统建模首先,需要对阵列系统进行建模。
这包括确定阵列的几何结构、传感器的位置和响应特性等。
通过建模,可以得到系统的传递函数,即系统对于输入信号的响应。
2.3.2 点源输入接下来,将一个点源输入到系统中,观察系统的输出。
传感器阵列设计与信号处理考核试卷

3. MUSIC算法基于信号子空间和噪声子空间的正交性,通过搜索峰值确定信号源位置。其优势在于高分辨率和抗干扰能力。
4.融合层次包括传感器级、特征级和决策级。传感器级融合提供原始数据集成,特征级融合对提取的特征进行处理,决策级融合进行最终决策。选择取决于系统需求和计算复杂度。例如,对于实时性要求高的系统,可选用决策级融合。
B.逆波束形成
C.频域分析
D.时间域分析
18.传感器阵列中的互模糊函数与以下哪个参数无关?()
A.时间延迟
B.频率偏移
C.传感器间距
D.信号波长
19.在阵列信号处理中,如何定义“旁瓣”现象?()
A.波束图中的主要波瓣
B.波束图中的次要波瓣
C.波束图中的最小值
D.波束图中的零点
20.下列哪种技术通常用于增加传感器阵列的动态范围?()
A.独立成分分析
B.最小方差无畸变响应
C.卡尔曼滤波
D.波束形成
13.哪些因素会影响传感器阵列的波束宽度?()
A.传感器的尺寸
B.阵列的孔径
C.传感器的数量
D.信号的波长
14.以下哪些方法可以用于提高传感器阵列的信号处理速度?()
A.并行处理
B.快速傅立叶变换
C.滤波器组设计
D.硬件加速
15.以下哪些传感器类型适用于温度测量?()
A.电感式传感器
B.压电传感器
C.磁电传感器
D.光电传感器
5.在信号处理中,以下哪些是时间域分析的特点?()
A.对信号的时间历程进行分析
B.对信号的频率成分进行分析
阵列信号考试复习题(全)

H 2
Nd
,利用倍
角公式化简,得到
sin
H 4
,当 Nd
2Nd
,可以得到第一零点位置为
null
H 2
2
。
Nd
10.阵元数较少时(N=4,5,6),波束图怎么画?(最大值,零点)
对于均匀加权的均匀线列阵, B
(
)
1 N
sin( N ) 2
Nd
d
出第一个零点位置为 Nd ,零点-零点波束宽度 BWNN 2 Nd 。
计算第一旁瓣:
Bu (u)
的分子逼近极大值,即
sin( Nd u) 1
,所以
Nd u ( m2 1 )m , 1, ,得2到 ,u 2m 1 , m 1, 2, , 第 一 旁 瓣 出 现 在
7.任意结构阵列,对于远场信号,其Vk 如何推导?
坐标原点的接收信号为: f (t)
阵列接收到的信号向量: f (t, p) [ f (t 0), f (t 1), , f (t N1)]T
sin cos 其中信号入射方向向量: a sin sin , u a
P
V
1 H ununHV
影响算法性能的因素:噪声和信号的相关性,两两阵元之间噪声的相关性,每个阵元的噪声方差是否相同,
阵列本身的流行向量在实际中很难于理论完全相符, S f 是否非奇异,信号个数是否已知,若信号个数位
置,对信号的个数如果判断少于实际源个数,会影响其正交关系(信源个数 Dmax N 1),是否为均匀
分布的直线阵,接受信号是否为远场平面波,采样点个数影响性能,在保证信号方向不变的情况下,越多 越好。
第四章 阵列信号处理

通常信号的频带B比载波 ω 小很多,即s(t)变化 相对 ω 缓慢,则延时
1 c
r α <<
T
1 B
则可以认为 s (t − r α ) ≈ s (t ) 即信号包络 在各阵元上差异可忽略——窄带信号。
4.2 等距线阵与均匀圆阵
一、等距线阵 M个阵元等距排成一直线,阵元间距为d,到达波 的方向角定义为与阵列法线的夹角 θ ,称为波 达方向(DOA)。 在三维空间中还可以 θ θ 确定信源方位角 ψ
d
5
4
y
ψ
2
1
x
等距线阵(ULA)的方向向量
aULA (θ ) = [1, e = [1, e
−j 2π − j k d sin θ −j
,L, e
2π
− j k ( M −1) d sin θ T
]
λ
d sin θ
,L, e
λ
( M −1) d sin θ
]T
若有多个信源(p个),波达方向分别为 θ i (i − 1, L, p) 方向矩阵为
A = [a(θ1 ), a(θ 2 ),L, a(θ p )] = 1 ⎡ ⎢ e − j 2λπ d sin θ1 =⎢ ⎢ L ⎢ − j 2λπ ( M −1) d sin θ1 ⎣e ⎤ π − j 2λ d sin θ p ⎥ L e ⎥ ⎥ L L π − j 2λ ( M −1) d sin θ p ⎥ L e ⎦ L 1
θ
d sin θ
Vandermonde矩阵
阵列结构不允许其方向向量和空间角之间模糊, 等距线阵阵元间距不能大于 λ ,则可以保证 2 方向矩阵中各个列向量线性独立。 二、等距线阵的阵列响应与方向图 在单个信源情况下,阵列输出为各阵元信号的加 权和(不考虑噪声),
阵列信号处理(知识点)
信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈L称()()()()12,,,P span a a a θθθL 为信号子空间,是N 维线性空间中的P 维子空间,记为P N S 。
P N S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W 实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X K ,其中θ为参数集合,使条件概率()12,,,N f X X X θK 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦M 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦M M而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦M M线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X W HW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理(知识点)
信号子空间:设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈称()()()()12,,,P span a a a θθθ 为信号子空间,是N 维线性空间中的P 维子空间,记为P NS 。
PN S 的正交补空间称为噪声子空间,记为N P N N -。
正交投影设子空间m S R ∈,如果线性变换P 满足,()1),,,2),,,0m mx R Px S x S Px x x R y S x Px y ∀∈∈∀∈=∀∈∀∈-=且则称线性变换P 为正交投影。
导向矢量、阵列流形设N 元阵接收p 个信源,则其信号模型为:()()()()1piiii x t s t a N t θ==+∑,其中矢量()i ia θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈波束形成波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()HHy t W X t s t W a θ==,通过加权系数W实现对θ的选择。
最大似然已知一组服从某概率模型()f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概率()12,,,N f X X X θ 最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ∆,则确定其导向矢量()2jn i a eπλθ∆=最后形成N 元阵的阵列流形矢量()11221N j j N Pe A e πλπλθ-∆∆⨯⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦ 例如各向同性的NxM 元矩形阵,阵元间隔为半个波长,当信源与阵列共面时:首先建立阵列几何模型:对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为(1)sin()(1)cos()mn i i n d m d θθ∆=---故:()1122(sin()cos())22((1)sin()(1)cos())11N j j d j j d N M NM P NM Pe e A e e ππθθλλππθθλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦而当信源与阵列不共面时: 首先将信源投影到阵列平面然后建立阵列模型对于第m 行、第n 列的阵元,其与第1行、第1列阵元之间的波程差为[(1)sin()(1)cos()]sin()mn i i i n d m d θθϕ∆=-+-故:()1122(sin()cos())cos()22((1)sin()(1)cos())cos()11N j j d j j d N M NM P NM Pe e A e e ππθθϕλλππθθϕλλθ-∆-∆---⨯⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦线性约束最小方差准则(LCMV )的自适应波束形成算法: 对于信号模型:()()()0X t s t a J N θ=++, 波束形成输出:()()()()0()H H H yt W X t s t W a W J N θ==++LCMV 准则实际上是使()0HW a θ为一个固定值的条件下,求取使得()HWJ N +方差最小的W 作为最有权值,即:()0min .H X WHW R Ws t W a Fθ⎧⎪⎨⎪=⎩,其中F 为常数利用拉格朗日乘子法可解得:()10X opt W R a μθ-=当取1F =时,则()()11H X a R a μθθ-=,μ的取值不影响SNR 和方向图。
阵列信号处理的基本知识分析
diag{g ej1 ,, g e } jM
1
M
阵元之间的互藕 有关因素:阵元之间的间距大小,系统工作 频段,采用的传感器类型等。 设所有阵元之间的藕合系数矩阵为C,则考 虑到阵元间互藕的阵列输出信号模型为:
x(t) CAs(t) n(t)
阵元位置 阵元测向的关键信息是空间信号入射到各阵 元的相对延迟相位,而这一相位依赖于阵元 之间的空间位置,阵元位置误差直接导致延 迟相位估计误差,从而影响信号参数估计。
信号参数估计(DOA,频率,极化参数,距离, 时延等): 谱估计方法(子空间方法,波束形成 方法),参数化方法(最大似然,基于子空间逼 近方法)。
Ref[1] H.krim and M.Viberg, Two decdees of array processing research: the parametric approach, IEEE signal processing Magazine, Vol.13, Vol.4, 1996. Ref.[2] D.H.Johnson, D.E.Dudgeon, Array signal processing, Prentice-Hall,1993. Ref.[3] IEE Proc. 1991. Ref.[4] Vaccaro, R.J, The past, present, and the future of underwater acoustic signal processing, IEEE Signal Processing Magazine, Vol.15 , No.4 , 1998.
-25
-30
-35
-40
-45
-50
-80 -60 -40 -20
0
20
现代信号处理讲义讲义
子空间:向量组 a1, ,ap 的线性组合的集合,称为 a1, ,ap 张成的空间。
p
span a1, ,a p close a1, ,a p ja j , j C
j1
信号子空间: span s1, ,sp span u1, ,up 噪声子空间: span g1, ,g p span up1, ,um
J (w) 0
w*
wopt Rxx1a(k )
又
wH opt
a(k
)
1
aH
(k
)wopt
,代入上式
aH
(k
1
)R xx1a( k
)
wopt
Rxx1a(k ) aH (k )Rxx1a(k )
最佳滤波器
由Capon提出,称为最小方差无畸变(MVDR)波束形成器
MVDR: minimum variance distortionless response
期望信号 干扰信号 加性噪声
E z(n) 2 lim 1 N z(n) 2 wH E x(n)xH (n) w
N N
n1
E sk (n) 2 wH a(k ) 2 p E si (n) 2 wH a(i ) 2 2 w 2 i 1,i k
wH a(k ) 1
(波束形成条件)
现代信号处理讲义
3.5 MUSIC方法
1. 阵列信号处理问题 2. 最优波束形成器 3. 子空间方法 4. MUSIC方法 5. 改进的MUSIC方法
3.5 MUSIC方法
MUSIC: Multiple Signal Classification 1. 阵列信号处理问题 (array signal processing)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.(1)关于接收天线阵列的假设。
接收阵列由位于空间已知坐标处的无源阵元按一定的形式排列而成。
假设阵元的接收特性仅与其位置有关而与其尺寸无关(认为其是一个点),并且阵元都是全向阵元,增益均相等,相互之间的互耦忽略不计。
阵元接收信号时将产生噪声,假设其为加性高斯白噪声,各阵元上的噪声相互统计独立,且噪声与信号是统计独立的。
(2)关于空间源信号的假设。
假设空间信号的传播介质是均匀且各向同性的,这时空间信号在介质中按直线传播,同时又假设阵列处在空间信号辐射的远场中,所以空间源信号到达阵列时可以看做是一束平行的平面波,空间源信号到达阵列各阵元在时间上的不同延时,可由阵列的几何结构和空间波的来向所决定。
空间波的来向在三维空间中常用仰角和方位角来表征。
其次,在建立阵列信号模型时,还常常要区分空间源信号是窄带信号还是宽带信号。
所谓窄带信号是指相对于信号(复信号)的载频而言,信号包络的带宽很窄(包络是慢变的),因此在同一时刻,该类信号对阵列各阵元的不同影响仅在于因其到达各阵元的波程不同而导致的相位差异。
2.自适应波束形成亦称空域滤波,是阵列处理的一个主要方面,逐步成为阵列信号处理的标志之一,其实质是通过对各阵元加权进行空域滤波,来达到增强期望信号、抑制干扰的目的;而且可以根据信号环境的变化自适应嘚改变各阵元的加权因子。
虽然阵列天线的方向图是全方向的,但阵列的输出经过加权求和后,可以被调整到阵列接收的方向增益聚集在一个方向,相当于形成了一个波束,这就是波束形成的物理意义所在。
波束形成技术的基本思想是:通过将各阵元输出进行加权求和,将天线阵列波束导向到一个方向上,对期望信号得到最大输出功率的导向位置即给出波达方向估计。
3. ULA :()1exp(2sin )
exp(2(1)sin )T
k k k d d
j j M θπθπθλλ⎡⎤
=---⎢⎥⎣⎦
α
L 阵:(,)[(,),(,)]T x y a a a θφθφθφ=,其中
2sin cos 2(1)sin cos (,)[1,...],,T j d j M x a e e πθφπθφθφ---=
2s i n s i n 22s i n
s i n 2(1
...(,)[,,,]
j d j
d j
M T y a e
e e πθφπθφπθφθφ----=
面阵: 12()()()M D D D ⎡⎤
⎢⎥
⎢⎥=⎢⎥⎢⎥⎢⎥⎣
⎦x y x y x y A A A A A A A ,其中1
1
2
2
1
1
2
2
2cos sin /2cos sin /2cos sin /2(1)cos sin /2(1)cos sin /2(1)cos sin /111
K K K K j d j d j d x j d M j d M j d M e e e e e e πθφλπθφλπθφλ
πθφλ
πθφλπθφλ---------⎡⎤
⎢⎥⎢⎥=⎢
⎥
⎢⎥⎣⎦
A
112211222sin sin /2sin sin /2sin sin /2(1)sin sin /2(1)sin sin /2(1)sin sin /111
K K K K j d j d j d y j d M j d M j d M e e
e e
e e πθφλ
πθφλ
πθφλ
πθφλπθφλ
πθφλ---------⎡
⎤⎢⎥⎢
⎥=⎢
⎥⎢⎥
⎣⎦
A
4. 输公式烦死了,详见张老师写的书《阵列信号处理的理论和应用》38页和45页(应该是,挑一个写,这玩意我也不懂)
5. MUSIC: 利用信号子空间和噪声子空间的正交性,通过谱峰搜索得到DOA 估计,适用任意
阵列结构。
Root-music :利用信号子空间和噪声子空间的正交性,通过求解多项式的根来避免谱峰
搜索。
Smooth-music: 处理相关信号的DOA 估计问题。
ESPRIT :利用信号子空间通过协方差分解来得到DOA 估计,对阵列流型要求较高。
PM :不需要协方差矩阵的特征值分解得到信号子空间和噪声子空间的同构矩阵,进而得
到DOA 估计,复杂度低于esprit 。
%%% DOA estimation by ESPRIT clear all close all clc
derad = pi/180; radeg = 180/pi;
twpi = 2*pi; kelm = 8; dd = 0.5; d=0:dd:(kelm-1)*dd; iwave = 3; theta = [-10 0 20]; snr = 10; n = 500;
A=exp(-j*twpi*d.'*sin(theta*derad)); S=randn(iwave,n); X=A*S;
X1=awgn(X,snr,'measured');
Rxx=X1*X1'/n;
[EV,D]=eig(Rxx);%%%%
EVA=diag(D).';
[EVA,I]=sort(EVA);
EVA=fliplr(EVA);
EV=fliplr(EV(:,I));
%ESPRIT
L=iwave;
Us=EV(:,1:L);
U1=Us(1:kelm-1,:);
U2=Us(2:kelm,:);
InvU1=inv(U1'*U1)*U1';
q=InvU1*U2;
[EVq,Dq]=eig(q);
Dq=diag(Dq).';
theta_esprit=asin(-angle(Dq)/(twpi*dd))*radeg
Dq=log(Dq)*(-j);
theta_esprit0=asin(-Dq/(twpi*dd))*radeg
8. 阵列信号处理是信号处理领域的一个重要分支,用传感器阵列来接收空间信号,与传统的单个定向传感器相比,具有灵活的波束控制、高的信号增益、极强的干扰抑制能力以及高的空间分辨能力等优点,直接导致阵列信号处理具有重要的军事、民事应用价值和广阔的应用前景,具体来说已涉及雷达、声纳、通信、地震勘探、射电天文以及医学诊断等多种领域。