一级倒立摆系统仿真及分析
一阶倒立摆建模及simulink仿真
《现代控制理论》三级项目报告题目:一级倒立摆控制系统设计姓名:刘然学号:160103010258专业:过程控制4班指导教师:吴忠强分数:2019年4月一级倒立摆控制系统设计倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。
对于倒立摆系统的控制研究长期以来被认为是控制理论及其应用领域里引起人们极大兴趣的问题,倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统。
研究倒立摆控制能有效地反映控制中的许多问题,倒立摆研究具有重要的理论价值和应用价值,理论上,它是检验各种新的控制理论和方法的有效实验装置。
应用上,倒立摆广泛应用于控制理论研究!航空航天控制,机器人、杂技顶杆表演等领域,在自动化领域中具有重要的价值。
另外,由于此装置成本低廉,结构简单,便于用模拟、数字等不同方式控制,在控制理论教学和科研中也有很多应用。
本文中,以一级倒立摆为研究对象,对它的起摆以及稳定控制做了研究,主要工作如下:1.首先介绍了倒立摆系统的组成和控制原理,建立了一级倒立摆的数学模型,对倒立摆系统进行定性分析,说明在平衡点是能控的。
2.分析了倒立摆的起摆过程,对倒立摆的起摆能量反馈控制进行分析与说明。
3.在matlab2018a的simulink库下对倒立摆构造单级倒立摆状态反馈控制系统的仿真模型。
4.对这次仿真的总结。
一、倒立摆的控制目标倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
二、建立单级倒立摆系统的状态空间模型其中,质量为M的小车在水平方向滑动,质量为m的球连在长度为L的刚性摆一端,x表示小车的位移,u是作用在小车上的力,通过移动小车使带有小球的摆杆始终处于垂直的位置。
为了简单起见,假设小车和摆仅在一个平面内运动,且不考虑摩擦、摆杆的质量和空气阻力。
如图1图1设系统的动态特性可以用小车的位移和速度及杆偏离垂线的角度θ和角速度⋅θ来描述。
一阶倒立摆模糊控制实验报告

一阶倒立摆模糊控制实验报告本次实验旨在研究一阶倒立摆系统的模糊控制方法,通过对系统进行建模、设计控制器并进行仿真,最终评估控制效果。
实验过程主要包括系统建模、控制器设计、模糊控制器参数调节和性能评价四个步骤。
首先,我们对一阶倒立摆系统进行建模。
一阶倒立摆系统是一种具有非线性特性的控制系统,主要由电机、倒立摆、支撑杆等组成。
我们需要建立数学模型描述系统的动力学特性,包括倒立角度、倒立角速度、杆角度等状态变量,并考虑控制输入电压对系统的影响。
接着,我们设计模糊控制器。
模糊控制是一种基于模糊逻辑的控制方法,适用于非线性系统和模糊系统。
我们根据系统模型,设计模糊控制器的模糊规则、隶属函数等参数,以实现系统的稳定控制。
在设计过程中,我们需要考虑系统的性能指标,如超调量、稳态误差等。
第三步是模糊控制器参数调节。
通过仿真实验,我们可以对模糊控制器的参数进行调节,以使系统的性能达到最佳状态。
调节参数的过程需要考虑系统的稳定性、鲁棒性和响应速度,以达到控制效果的要求。
最后,我们对模糊控制系统进行性能评价。
通过对系统的响应曲线、稳定性、控制精度等指标进行分析,评价模糊控制器的控制效果。
我们可以比较模糊控制系统和传统控制系统的性能,探讨模糊控制在一阶倒立摆系统中的优势和局限性。
总的来说,本次实验通过研究一阶倒立摆系统的模糊控制方法,探讨了模糊控制在非线性系统中的应用。
通过实验,我们对模糊控制的基本原理和设计方法有了更深入的理解,同时也对一阶倒立摆系统的控制特性有了更清晰的认识。
希望通过实验的研究,能够为控制系统的设计和应用提供一定的参考和借鉴。
基于双闭环PID控制的一阶倒立摆控制系统设计
基于双闭环PID控制的一阶倒立摆控制系统设计一阶倒立摆是一种常见的控制系统,它由一个旋转臂和一个悬挂在旋转臂末端的摆杆组成。
控制目标是使摆杆保持垂直位置并保持在指定的角度范围内。
本文将基于双闭环PID控制设计一阶倒立摆控制系统,并对其进行详细的分析和讨论。
首先,我们需要明确控制系统的结构。
一阶倒立摆控制系统可以分为两个闭环:内环和外环。
内环用于控制旋转臂的角度,并将输出作为外环的输入。
外环用于控制摆杆的角度,并根据测量的摆杆角度和设定的目标角度来调整内环的输入。
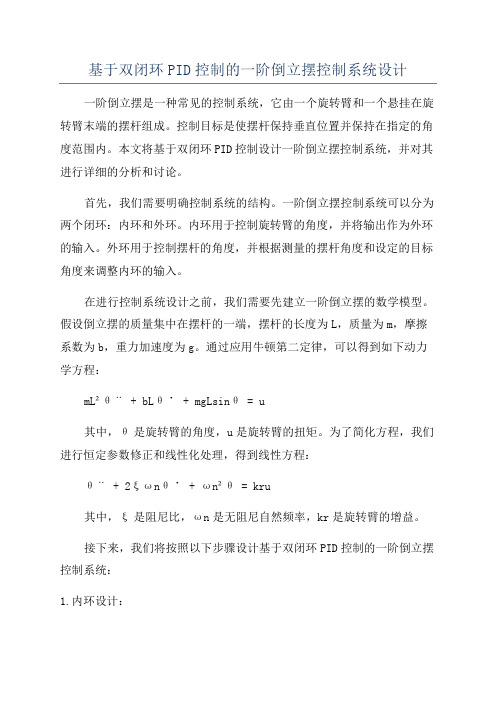
在进行控制系统设计之前,我们需要先建立一阶倒立摆的数学模型。
假设倒立摆的质量集中在摆杆的一端,摆杆的长度为L,质量为m,摩擦系数为b,重力加速度为g。
通过应用牛顿第二定律,可以得到如下动力学方程:mL²θ¨ + bLθ˙ + mgLsinθ = u其中,θ是旋转臂的角度,u是旋转臂的扭矩。
为了简化方程,我们进行恒定参数修正和线性化处理,得到线性方程:θ¨ + 2ξωnθ˙ + ωn²θ = kru其中,ξ是阻尼比,ωn是无阻尼自然频率,kr是旋转臂的增益。
接下来,我们将按照以下步骤设计基于双闭环PID控制的一阶倒立摆控制系统:1.内环设计:-选择合适的内环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
可以使用试错法、经验法、系统辨识等方法进行参数调整。
-将PID控制器的输入设置为旋转臂角度误差,输出为旋转臂的扭矩。
2.外环设计:-选择合适的外环闭环控制器类型。
对于一阶倒立摆,可以选择PID控制器。
-根据倒立摆的特性和性能要求,选择合适的PID参数。
-将PID控制器的输入设置为摆杆角度误差,输出为旋转臂的角度设定值。
3.进行系统仿真和调试:-使用MATLAB等仿真工具建立一阶倒立摆的数学模型,并将设计的控制器与模型进行集成。
-调整控制器的参数,以满足性能指标和系统稳定性的要求。
一级倒立摆的建模与控制分析

人生的磨难是很多的,所以我们不可对于每一件轻微的伤害都过于敏感。在生活磨难面前,精神上的坚强和无 动于衷是我们抵抗罪恶和人生意外的最好武器。
真理惟一可靠的标准就是永远自相符合。土地是以它的肥沃和收获而被估价的;才能也是土地,不过它生产的 不是粮食,而是真理。如果只能滋生瞑想和幻想的话,即使再大的才能也只是砂地或盐池,那上面连小草也长 不出来的。
4.应用 Matlab 进行系统最优控制设计 ........................................................- 11 5.总结 ............................................................................................................. - 13 -
忽略干扰力后,直线一级倒立摆系统是单输入二输出的四阶系统,考虑干扰力后, 直线一级倒立摆系统是二输入二输出的四阶系统。其内部的4个状态量分别是小车的
位移x、小车的速度 x 、摆杆的角度θ、摆杆的角速度 。系统输出的观测量为小车
的位移x、摆杆的角度θ。其控制量为小车的加速度
将微分方程(1-12)化为关于加速度输入量和角度输出量的传递函数:
1.问题描述及状态空间表达式建立 1.1 问题描述
倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结 合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统, 可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一 种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验 平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思 想的发展。 下对于倒立摆系统,经过小心的假设忽略掉一些次要的因素后,它就是一个典型的 运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。 下面采用其中的牛顿—欧拉方法建立直线一级倒立摆系统的数学模型。
一级倒立摆实验(状态反馈)

第1章倒立摆系统介绍1.1 倒立摆系统简介倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。
近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。
倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。
由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。
平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。
1.2 倒立摆分类倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆,环形倒立摆,平面倒立摆和复合倒立摆等,倒立摆系统是在运动模块上装有倒立摆装置,由于在相同的运动模块上可以装载不同的倒立摆装置,倒立摆的种类由此而丰富很多,按倒立摆的结构来分,有以下类型的倒立摆:1) 直线倒立摆系列直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件,可以组成很多类别的倒立摆,直线柔性倒立摆和一般直线倒立摆的不同之处在于,柔性倒立摆有两个可以沿导轨滑动的小车,并且在主动小车和从动小车之间增加了一个弹簧,作为柔性关节。
直线倒立摆系列产品如图 1-1 所示。
直线一级倒立摆的建模及性能分析

直线一级倒立摆的建模及性能分析1 直线一级倒立摆数学模型的建立 (1)2 直线一级倒立摆系统的实际模型 (5)3 直线一级倒立摆系统的性能分析 (6)相关理论的介绍 (6)倒立摆系统的性能分析 (7)1 直线一级倒立摆数学模型的建立所谓系统的数学模型,是指利用数学结构来反映实际系统内部之间、系统内部与外部某些主要相关因素之间的精确的定量表示。
数学模型是分析、设计、预测以及控制一个系统的理论基础。
因此,对于实际系统的数学模型的建立就显得尤为重要。
系统数学模型的构建可以分为两种:实验建模和机理建模。
实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对像并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。
机理建模就是在了解研究对象的运动规律的基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系。
对于倒立摆系统,由于其本身是不稳定的系统,无法通过测量频率特性的方法获取其数学模型,实验建模存在一定的困难。
但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统是一个典型的机电一体化系统,其机械部分遵守牛顿运动定律,其电子部分遵守电磁学的基本定律,因此可以通过机理建模得到系统较为精确的数学模型。
为了简单起见,在建模时忽略系统中的一些次要的难以建模的因素,例如空气阻力、伺服电机由于安装而产生的静摩擦力、系统连接处的松弛程度、摆杆连接处质量分布不均匀、传动皮带的弹性、传动齿轮的间隙等。
将小车抽象为质点,摆杆抽象为匀质刚体,摆杆绕转轴转动,这样就可以通过力学原理建立较为精确的数学模型。
我们可以应用牛顿力学的分析方法或者欧拉-拉格朗日原理建立系统的动力学模型。
对于直线一级倒立摆这样比较简单的系统,我们采用通俗易懂的牛顿力学分析法建模。
为了建立直线一级倒立摆的数学模型,采用如下的坐标系:图1直线一级倒立摆的物理模型其中,F 为加在小车上的力,M 为小车质量,m 为摆杆质量,I 为摆杆惯量, l 为摆杆转动轴心到杆质心的长度,x 为小车位移,φ为摆杆与垂直向上方向的夹角,b 为小车在滑轨上所受的摩擦力,N 和P 为摆杆相互作用力的水平和垂直方向的分量。
基于MATLAB-GUI的一级倒立摆控制仿真软件设计
基于MATLAB-GUI的一级倒立摆控制仿真软件设计基于MATLAB/GUI的一级倒立摆控制仿真软件设计摘要:本文介绍了一种基于MATLAB/GUI的一级倒立摆控制仿真软件的设计方法。
倒立摆是一个经典的控制系统问题,通过控制摆杆使其保持垂直状态。
本文使用MATLAB作为仿真平台,并通过GUI界面设计,使得用户可以方便地输入参数、观察系统状态和结果。
通过该仿真软件,可以有效地学习和研究控制系统的设计与应用。
关键词:MATLAB;倒立摆;控制系统;仿真软件;GUI一、引言倒立摆是一种非线性、强耦合且不稳定的控制系统,是控制理论中经典的问题之一。
倒立摆控制系统受到广泛的研究关注,其在机器人、飞行器、自动驾驶等领域有着重要的应用。
为了帮助学习者理解控制系统的原理和特点,设计了一种基于MATLAB/GUI的一级倒立摆控制仿真软件。
二、仿真软件设计1. 系统模型建立使用MATLAB工具箱中的Simulink建立倒立摆的系统模型。
系统包含两个部分:摆杆和电机控制器。
摆杆模型包括质量、长度、角度等参数;电机控制器模型包括电压、电流、转速等参数。
连接两个模块,构建完整的倒立摆控制系统。
2. GUI界面设计使用MATLAB的GUI工具进行界面设计,用户可以通过界面方便地输入参数、选择控制算法和观察系统状态。
界面包括输入参数框、按钮、图表等控件。
3. 控制算法设计通过GUI界面,用户可以选择不同的控制算法,如PID控制、模糊控制、自适应控制等。
根据选择的算法,修改Simulink模型中的控制器参数,并进行仿真分析。
4. 仿真结果可视化在GUI界面中添加图表,可以实时显示倒立摆的角度、位置等参数。
用户可以通过修改参数和算法,观察系统的响应结果并进行分析。
三、应用实例以PID控制算法为例,进行系统仿真。
用户可以通过GUI界面输入摆杆的质量、长度、角度等参数。
选择PID控制算法后,可以调节PID参数的值,观察系统响应和稳定性。
科研训练-基于MATLAB的直线一级倒立摆仿真系统研究
科研训练结题报告名称:基于MATLAB的直线一级倒立摆仿真系统研究小组成员:指导教师:1.直线一级倒立摆问题简介 (6)1.1背景简介【1】 (6)1.2软件特性 (6)1.3设计要求分析 (6)2. 数学模型的建立 (7)2.1 倒立摆受力分析 (7)2.2 微分方程的推导 (8)3.Simulink仿真模型 (9)3.1 Simulink仿真简介【2】 (9)3.2 初次模型搭建 (10)3.3 二次模型搭建 (11)3.4 二次模型优化 (12)3.5最终仿真模型及仿真结果 (13)4.封装子系统 (19)4.1 封装子系统简介 (19)4.2 封装子系统设置 (20)5. PID控制 (20)5.1 PID控制理论 (20)5.2 基于SIMULINK的PID控制器设计 (22)5.3 PID参数的确定 (24)6. 成果汇总与分析 (31)7. 经验总结与心得体会 (32)参考文献 (32)1.直线一级倒立摆问题简介1.1背景简介【1】倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。
基于Matlab的一级倒立摆模型的仿真
-s2 s4+-20 .58 s2 Transfer Fcn
Pulse Generator
由于未加进控制环节,故系统输出发散
2、加进控制环节,实现时域的稳定控制
0 Constant
-K Gain
1 Gain 1
1 s
Integrator
-40 Gain 3
du /dt Derivative
二、倒立摆模型的数学建模 质量为 m 的小球固结于长度为 L 的细杆(可忽略杆的质量)上,细杆又和质量 为 M 的小车铰接相连。由经验知:通过控制施加在小车上的力 F(包括大小和 方向)能够使细杆处于θ=0 的稳定倒立状态。在忽略其他零件的质量以及各种 摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型
甲方(用人单位): 名称: 法定代表人: 地址: 经济类型: 联系电话:
乙方(职工): 姓名: 身份证号码: 现住址:
联系电话:
根据(中华人民共和国劳动法》和国家及省的有关规定,甲乙双方按照平等自愿、协商一致的原则订立
本合同。
一、合同期限
(一)合同期限
双方同意按以下第
种方式确定本合同期限:
1、有固定期限:从
(a)
=m(x’+lcosθθ’)’
= mx’’+mlcosθθ’’-mlsinθ(θ’)^2
(b)
由(a)、(b)两式得 F= (M+m)x’’ +mlcosθθ’’-mlsinθ(θ’)^2
<1>
小球垂直方向上位移为 lcosθ
故受力为
F’cosθ -mg=m(lcosθ)’’
=-mlθ’’sinθ-mlcosθ(θ’)^2
天,每周至少休息一天。 2、不定时工作制,即经劳动保障部门审批,乙方所在岗位实行不定时工作制。 3、综合计算工时工作制,即经劳动保障部门审批,乙方所在岗位实行以 为周期,总工时 小 时的综合计算工时工作制。 (二)甲方因生产(工作)需要,经与工会和乙方协商后可以延长工作时间。除(劳动法)第四十二条规定 的情形外,一般每日不得超过一小时,因特殊原因最长每日不得超过三小时,每月不得超过三十六小时。 四,工资待遇 (一)乙方正常工作时间的工资按下列第( )种形式执行,不得低于当地最低工资标准。 1、乙方试用期工资 元/月;试用期满工资
基于adams和matlab的一级倒立摆联合仿真
基于adams和matlab的一级倒立摆联合仿真————————————————————————————————作者:————————————————————————————————日期:基于PRO/E,ADAMS和MATLAB/SIMULINK 的双回路PID控制一级倒立摆联合仿真目录一、倒立摆简介1、概述2、倒立摆分类3、倒立摆控制方法二、联合仿真流程三、基于PRO/E的一级倒立摆三维建模四、基于ADAMS的一级倒立摆模型设计五、ADAMS和MATLAB/SIMULINK的联合仿真六、一级倒立摆的双回路PID控制策略1、一级倒立摆的角度控制2、一级倒立摆的双闭环控制3、一级倒立摆摆杆长度参数对控制策略的影响七、问题总结参考文献一、倒立摆简介1、概述倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自由连接(即无电动机或其他驱动设备)。
倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。
当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
图1.1 一级倒立摆2、倒立摆分类(1)直线型倒立摆它是最常见倒立摆系统,也称车摆装置,根据目前的研究它又分为1,2,3,4级车摆,典型结构图如图11.2所示,图中以三级车摆为例,它是由可以沿直线导轨运动的小车以及一端固定于小车之上的匀质长杆组成的系统,小车可以通过转动装置由力矩电机、步进电机、直流电机或者交流伺服电机驱动,车的导轨一般有固定的行程,因而小车的运动范围都是受到限制的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 一级倒立摆系统仿真及分析 1.摘要 本次课程设计,我们小组选择一级倒立摆系统作为物理模型,首先通过物理分析建立数学模型,得到系统的传递函数,通过对传递函数的极点,根轨迹,单位阶跃响应来分析系统稳定性。建立状态空间模型,利用matlab进行能控能观性分析,输入阶跃信号,分析系统输出响应。通过设定初始条件,查看系统稳定性,利用simulink绘制系统状态图。再对系统进行极点配置,进行状态反馈,使得系统在初始状态下处于稳定状态,并绘制系统状态图。
2.课程设计目的 倒立摆系统是一个经典的快速、多变量、非线性、绝对不稳定系统,是用来检验某种控制理论或方法的典型方案。倒立摆控制理论产生的方法和技术在半导体及精密仪器加工、机器人技术、导弹拦截控制系统和航空器对接控制技术等方面具有广阔的开发利用前景。因此研究倒立摆系统具有重要的实践意义。
3.课程设计题目描述和要求 本次课程设计我们小组选择环节项目三:系统状态响应、输出响应的测量。 环节目的: 1.利用MATLAB分析线性定常系统。 2.利用SIMULINK进行系统状态空间控制模型仿真,求取系统的状态响应及输出响应。 环节内容、方法: 1.给定系统状态空间方程,对系统进行可控性、可观性分析。并利用SIMULINK绘制系统的状态图,求取给定系统输入信号和初始状态时的状态响应及输出响应。 2.给定两个系统的状态空间模型,分别求两个系统的特征值;将两个系统的系统矩阵化为标准型;求出给定系统初始状态时,状态的零输入响应;求两个系统的传递函数并分析仿真结果。 2
4.课程设计报告内容 4.1 数学模型的建立及分析 对于倒立摆系统,由于其本身是自不稳定的系统,实验建模存在一定的困难。但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统就是一个典型的运动的刚体系统,可以在惯性坐标系内应用经典力学理论建立系统的动力学方程。下面我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型。 在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示
图l 直线一级倒立摆系统 我们不妨做以下假设: M小车质量、m摆杆质量、b小车摩擦系数、l摆杆转动轴心到杆质心的长度、I 摆杆惯、F加在小车上的力、x 小车位置、φ摆杆与垂直向上方向的夹角、θ摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)。 图2,图3分别是系统中小车和摆杆的受力分析图。 其中, N 和 P 为小车与摆杆相互作用力的水平和垂直方向的分量。注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向定义如图所示,图示方向为矢量正方向: 3
图2 小车隔离受力图 图3 摆杆隔离受力图 分析小车水平方向所受的合力,可以得到以下方程:
NxbFxM (1) 由摆杆水平方向的受力进行分析可以得到下面等式:
sin122lkdmN
即: sincos
2
mlmlxmN (2)
把这个等式代入上式中,就得到系统的第一个运动方程:
FmlmxbxMmsincos2 (3)
为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析, 4
可以得到下面方程: cos22ldtdmmgP 即:cossin2mlmlmgP (4) 力矩平衡方程如下: INlPlcossin (5) 方程中力矩的方向,由于sinsin,coscos,,故等式前面有负号。合并这两个方程,约去P和N,得到第二个运动方程:
cossin2xmlmglmlI (6)
设(φ是摆杆与垂直向上方向之间的夹角),假设φ与l(单位是弧度)相比很小,即φ《1,则可以进行近似处理:
0,sin,1cos2dt
d
用u 代表被控对象的输入力F ,线性化后两个运动方程如下: umlxbxmMxmlmglmlI2 (7)
4.2 传递函数建立及分析 对方程组(7)进行拉普拉斯变换,得到:
sUssmlssbXssXmMssmlXsmglssmlI
22222
(8)
注意:推导传递函数时假设初始条件为0。 由于输出为角度φ,求解方程组(3.8)的第一个方程,可以得到: ssgmlmlIsX22)( (9)
把上式代入方程组(8)的第二个方程,得到: 5
sUssmlsssgmlmlIbsssgmlmlImM
22
222
(10) 整理后得到传递函数:
sqbmglsqmglmMsqmlIbssqmlsUs
2324
2
(11) 其中:22mlmlIMmq 实际的系统模型如下: M 小车质量 1.096 Kg m 摆杆质量 0.109 Kg b 小车摩擦系数 0 .1N/m/sec l 摆杆转动轴心到杆质心的长度 0.25m
I 摆杆惯量 0.0034 kg*m*m T 采样频率 0.005秒 将参数代入(11)中,求得q=0.0115635, ssssssUs31.283.270883167.035655.2342
利用MATLAB求出该传递函数的极点为:s1=5.2728 s2=-5.2781 S3=-0.0830 s4=0 由此可以看出存在正极点,故系统不稳定。对该系统输入单位阶跃信号,其输出信号为: clear num = [2.356553 0 0] den = [1 0.0883167 -27.83 -2.31 0] g=tf(num,den) [y,t,x]=step(g) 6
plot(t,y) 再利用用MATLAB绘制出根轨迹: clear num = [2.356553 0 0] den = [1 0.0883167 -27.83 -2.31 0] rlocus(num,den) [k,poles]=rlocfind(num,den); 根轨迹如下图所示:
通过对传递函数的分析,可知该系统是不稳定的,需要添加控制器来控制系统使其稳定。 7
4.3 状态空间结构方程建立及分析 系统状态空间方程为 DnCXyBuAXx (12)
方程组(3.12)对,x解代数方程,得到解如下:
uMmlmMImlMmlmMImMmglxMmlmMImlbuMmlmMImlIMmlmMIglmxMmlmMIbmlIxxx2222222222)()()(
(13) 整理后得到系统状态空间方程:
2222
222
222
01000
0000001
00
ImlbxxImlmglIMmMmlxxIMmMmlIMmMmlumlmglMmmlbIMmMmlIMmMmlIMmMml
(14)
uxxxy0000000001 (15) 由公式(3.7)的第一个方程为: xmlmglmlI2 (16)
对于质量均匀分布的摆杆有: 23
1mlI (17)
于是可以得到: xmlmglmlml223
1 (18)