第3章 离散系统的时域分析
微积分讲座---Z3.15 单位阶跃响应与单位脉冲响应的关系

k
(k) (i) i
k
g(k) h(i) i
由于
(k) (k) (k) (k 1)
那么
h(k) g(k) g(k) g(k 1)
2
3.2 基本信号与基本响应
第三章 离散系统的时域分析
例3 某离散系统的差分方程如下,求单位脉冲响应h(k) 和单位阶跃响应g(k)。
y(k) y(k 1) 2y(k 2) f (k)
解:(1)先求h(k)
h(k) h(k 1) 2h(k 2) (k)
初始条件:h(1) h(2) 0
由迭代得:
h(0) 1,h(1)=1
代入初始值求: h(k) C1(1)k C2(2)k,k 0
h(k) 1 (1)k 2 响应
第三章 离散系统的时域分析
(2)再求g(k)
h(k) 1 (1)k 2 (2)k,k 0
3
3
g(k) k h(i) 1 k (1)i 2 k (2)i
i
3 i0
3 i0
由级数求和公式得:
k (1)i 1 (1)k1 1 [1 (1)k ]
i0
3.2 基本信号与基本响应
知识点Z3.15
第三章 离散系统的时域分析
单位阶跃响应与单位脉冲响应的关系
主要内容:
单位阶跃响应与单位脉冲响应之间的关系
基本要求:
掌握 g(k) 和 h(k) 之间的关系
1
3.2 基本信号与基本响应
第三章 离散系统的时域分析
Z3.15 单位阶跃响应与单位脉冲响应的关系
由于 那么
1 (1) 2
k (2)i 1 (2)k1 2(2)k 1
i0
1 2
得单位阶跃响应为:
信号与线性系统分析第三章

系统描述 分析方法
连续系统 微分方程 卷积积分 变换域(傅氏、s) 系统函数
离散系统 差分方程 卷积和 变换域(离散傅氏、z) 系统函数
第 2页
§2.1 LTI离散系统的响应
• 差分与差分方程 —前向差分、后向差分以及差分方程
• 差分方程解 —数值解、经典解,以及不同特征根对应的齐 次解和不同激励对应的特解
yzi (-2) = y(-2)
-----------
yzi (n) = ?
----------------yzi (-n) = y(-n)
第 13 页
零输入举例
例1:系统方程为 y(k) + 3y(k –1) + 2y(k –2) = f(k) 已知激励f(k)=2k , k≥0;初始状态 y(–1)=0, y(–2)=1/2 求系统的零输入响应
解:yzi(k)零输入响应满足:
yzi(k) + 3yzi(k –1)+ 2yzi(k –2)= 0
yzi(–1)= y(–1)= 0 yzi(–2) = y(–2) = 1/2 递推求 yzi(0)、 yzi(1) yzi(k)= – 3yzi(k –1) –2yzi(k –2)
yzi(0)= –3yzi(–1) –2yzi(–2)= –1
yzs(0)、yzs(1)、---yzs(n)=? 借助微分方程
n
若其特征根均为单根: yzk (k ) Czsjkj y p (k ) j 1
第 16 页
零状态举例
例1:系统方程为 y(k) + 3y(k –1) + 2y(k –2) = f(k) 已知激励f(k)=2k , k≥0;求系统的零状态响应 解:零状态响应yzs(k) 满足
离散系统的时域分析实验报告

实验2 离散系统的时域分析一、实验目的1、熟悉并掌握离散系统的差分方程表示法;2、加深对冲激响应和卷积分析方法的理解。
二、实验原理在时域中,离散时间系统对输入信号或者延迟信号进行运算处理,生成具有所需特性的输出信号,具体框图如下:其输入、输出关系可用以下差分方程描述:输入信号分解为冲激信号,记系统单位冲激响应,则系统响应为如下的卷积计算式:... . 当时,h[n]是有限长度的(),称系统为FIR 系统;反之,称系统为IIR 系统。
三、实验容1、用MATLAB 求系统响应1) 卷积的实现线性移不变系统可由它的单位脉冲响应来表征。
若已知了单位脉冲响应和系统激励就可通过卷积运算来求取系统响应,即)(*)()(n h n x n y 程序:x=input(‘Type in the input sequence=’); %输入xh=input(‘Type in the impulse response sequence=’); %输入h y=conv(x,h); % 对x ,h 进行卷积 N=length(y)-1; %求出N 的值n=0:1:N; %n 从0开始,间隔为1的取值取到N 为止 disp(‘output sequence=’); disp(y); %输出y stem(n,y); %画出n 为横轴,y 为纵轴的离散图xlabel(‘Time index n ’); ylable(‘Amplitude ’); % 规定x 轴y 轴的标签 输入为:x=[-2 0 1 -1 3] h=[1 2 0 -1]图形:2) 单位脉冲响应的求取线性时不变因果系统可用MA TLAB 的函数filter 来仿真 y=filter(b,a,x);其中,x和y是长度相等的两个矢量。
矢量x表示激励,矢量a,b表示系统函数形式滤波器的分子和分母系数,得到的响应为矢量y。
例如计算以下系统的单位脉冲响应y(n)+0.7y(n-1)-0.45y(y-2)-0.6y(y-3)=0.8x(n)-0.44x(n-1)+0.36x(n-2)+0.02x(n-3) 程序:N=input(‘Desired impuse response length=’);b=input(‘Type in the vector b=’);a=input(‘Type in the vector a=’);x=[1 zeros(1,N-1)];y=filter(b,a,x);k=0:1:N-1;stem(k,y);xlabel(’Time index n’); ylable(‘Amplitude’);输入:N=41b=[0.8 -0.44 0.36 0.02]a=[1 0.7 -0.45 -0.6]图形:2、以下程序中分别使用conv和filter函数计算h和x的卷积y和y1,运行程序,并分析y和y1是否有差别,为什么要使用x[n]补零后的x1来产生y1;具体分析当h[n]有i个值,x[n]有j个值,使用filter完成卷积功能,需要如何补零?程序:clf;h = [3 2 1 -2 1 0 -4 0 3]; %impulse responsex = [1 -2 3 -4 3 2 1]; %input sequencey = conv(h,x);n = 0:14;subplot(2,1,1);stem(n,y);..xlabel('Time index n'); ylabel('Amplitude');title('Output Obtained by Convolution'); grid;x1 = [x zeros(1,8)];y1 = filter(h,1,x1);subplot(2,1,2);stem(n,y1);xlabel('Time index n'); ylabel('Amplitude');title('Output Generated by Filtering'); grid;图形:因为在y=filter(b,a,x)中,利用给定矢量a和b对x中的数据进行滤波,结果放入y矢量中,y与x长度要相等,所以要使用x[n]补零后的x1来产生y1。
离散系统时域分析
z = eTs = eT e jT
写成极坐标形式为
z = z e j = eT e jT s的实部只影响z的模,s的虚部只影响z的相角。
s平面与z平面的映射关系为
s平面
映射
z平面
0 右半平面 =0 虚轴 0 左半平面
z 1 单位园外
z =1 单位园周
cr
pr k
cr
pr k
cr cr e jr , cr cr e jr
cr
pr k
cr
1
pr
k 1
cr
e jr
pr ek jkr
cr e jr
p ek jkr r
c p e e k j(kr r )
j(kr r )
r
r
r(t)
+-
100 c(t) s(s+10)
解:由已知的G(s)可求出开环脉冲传递函数
10z(1 e10T ) G(z) (z 1)( z e10T )
闭环特征方程为
z2 + 3.5z + 0.5 = 0
z1 = 0.15 z2 = 3.73
因为 z2 1,所以该系统是不稳定的。
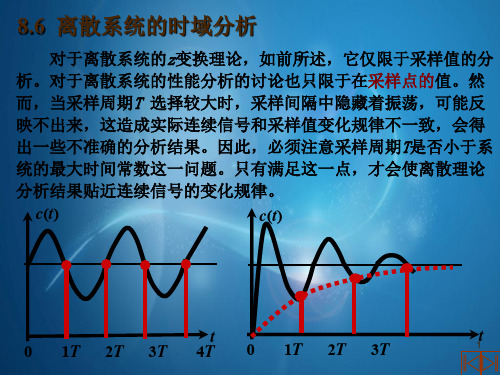
8.6 离散系统的时域分析
对于离散系统的z变换理论,如前所述,它仅限于采样值的分
析。对于离散系统的性能分析的讨论也只限于在采样点的值。然
而,当采样周期T 选择较大时,采样间隔中隐藏着振荡,可能反
映不出来,这造成实际连续信号和采样值变化规律不一致,会得
出一些不准确的分析结果。因此,必须注意采样周期T是否小于系
z 1 w 或 z w1
离散系统的时域分析_OK

pk[c cos k Dsin k] 或Apk cos(k )
其 中
Ae j
C
jD
Ar1k r1 k cos( k r1) Ar2k r2 k cos( k r2) ... A0 k cos( k 0)
8
2. 特解
激励 f (k)
特解 yp (k)
km
Pmk m Pm1k m1 ... P1k P0 k r Pmk m Pm1k m1 ... P1k P0
y
f
(1)
3y f
(0) 2 y f
(1)
f
(1)
1
14
系统的零状态响应是非齐次差分方程的全解,分别求出方程
的齐次解和特解,得
yf
(k)
C f1
(1)k
C f2
(2)k
yp (k)
C f1
(1)k
C f2
(2)k
1 3
(2)k
将初始值代入上式,得
y
f
(0)
C
f
1
C
f
2
1 3
1
yf
(1)
1C f
yx
(1)
y(1)
0,
yx
2
y
2
1 2
yx (0) 3 yx (1) 2 yx 2 1
yx 1 3yx 0 2 yx 1 3
2021/9/5
求得初始值
13
1 1, 1 2
yx
(k)
Cx1
(1)k
Cx2
(2)k
yx yx
(0) (1)
Cx1 Cx2 Cx1 2Cx2
差分方程与微分方程的求解方法在很大程度上是相互对 应的.
《信号与系统》第三章 离散系统的时域分析

h(k) = h1(k) – h1(k – 2) =[(1/3)(– 1)k + (2/3)(2)k]ε(k) – [(1/3)(– 1)k –2 + (2/3)(2)k–2]ε(k – 2)
f (i)h(k i) ai (i)bki (k i)
i
i
当i < 0,ε(i) = 0;当i > k时,ε(k - i) = 0
1
a
k
1
yzs
(k
)
k i0
aibk
i
(k
)
bk
k i0
a b
i
(k
)
bk
bk
b 1 a
b (k 1)
注:ε(k)*ε(k) = (k+1)ε(k)
当ik时ki0???????????????iikiiikbiaikhif?????????????????????????????????????????????????bakbbabababkbabkbakykkkkiikkiikizs111100??注
《信号与系统》 第三章 离散系统的时域分析
λ n + an-1λn– 1 + … + a0 = 0 其根λi( i = 1,2,…,n)称为差分方程的特征根。 齐次解的形式取决于特征根。
参看教材第87页 表3-1。
2. 特解yp(k): 特解的函数形式与激励的函数形式有关
信号与线性系统分析--第三章

第三章 离散系统的时域分析
本章概述
离散时间域的方程求解
连续时间域 时间函数 微分方程 卷积积分 离散时间域 离散序列 差分方程 卷积求和
求解方法
迭代法 经典法 卷积法
连续时间信号、连续时间系统
连续时间信号
f(t)是连续变化的t的函数,除若干不连续点之外 对于任意时间值都可以给出确定的函数值。函数 的波形一般具有平滑曲线的形状,一般也称模拟 信号
f (n) .... f (1) (n 1) f (0) (n) f (1) (n 1) ...
i
f (i) (n i)
f(k ) f(2) f(-1) f(1) f(0) … 1 2 i f(i) … k
可推出:离散系统的零状态响应
y zs (n)
m
f (m) (n m)
单位阶跃序列
与阶跃函数的不同?
延时的单位阶跃序列
用单位样值序列来表示
u( n) ( n) ( n 1) ( n 2) ( n 3) (n k )
k 0
( n) u(n) u( n 1)
题目中 y0 y1 0 ,是激励加上以后的,不是初始状 态,需迭代求出 y 1, y 2 。
n 1 y1 3 y0 2 y 1 2u 1 2 u 0
0
0 0 2 y1 2 1 1
1 y 1 2
n0
y0 3 y 1 2 y 2 2 u 0 2 u 1
0 1
0 3 y 1 2 y 2 1
y 2 5 4
将初始状态代入方程求系数
数字信号处理课件第3章 时域离散信号和系统的频域分析2-DTFT的定义
例3、已知 f (n) anu(n) a 1 ,计算其DTFT。 解:
由此可以得到DTFT的幅频特性和相频特性
F (e j )
1
(1 a cos)2 (a sin )2
【随堂练习】
1.设X (e j )是 x(n)的DTFT,试求下面序列的DTFT。
(1) x(n - n0)
(2) x(n) (3) x(n)
X_abs=abs(X)
X_angle=angle(X)
subplot(211)
plot(w/pi,X_abs,'k','lineWidth',2) title('离散时间傅里叶变换幅度')
subplot(212)
plot(w/pi,X_angle,'k','lineWidth',2) title('离散时间傅里叶变换相位')
0, n q
解:
q
X(e j ) x(n)e jn a ne jn
q
(ae j )n
n
n0
n0
1
(ae j ) 1 ae j
q1
等比数列求和公式:
an a1 qn1
Sn
a1
(1 qn ) , 1 q
n 1,2,3,
q 1
X(e j ) x(n)e jn
n
1
(ae j )q 1 ae j
可引入冲激函数,一些绝对不可和的 序列的傅里叶变换可用冲激函数的形式表 示出来。在后面的章节予以介绍。
例1、计算矩形序列 x(n) R N (n) 的DTFT。
解:
X(e j ) RN (n)e jnnFra bibliotekN 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 离散系统的时域分析学习要求(1)会建立描述系统激励与响应关系的差分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统差分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激序列响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统差分方程和输入判断0时刻的跳变情况; (7)理解卷积和运算在信号与系统中的物理意义和运算规律,会计算信号的卷积和。
本章重点(1)系统数学模型(差分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激序列响应及其求解;(4)卷积和的定义、性质及运算,特别是()2(1)(1)y k y k f f k +-=--(k )函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
离散系统的描述方法:差分方程。
差分方程与微分方程求解方法在相当大的程度上一一对应。
与卷积类似,离散系统中占重要地位的卷积和(简称卷积)。
离散系统中的变换域方法包括z 变换、离散傅里叶变换以及其他多种离散正交变换(如沃尔什变换、离散余弦变换等等)。
与连续时间系统相比较,离散时间系统具有精度高,可靠性好,便于实现大规模集成的优点,借助于软件控制,可编程序控制器得到了广泛应用。
3.1 离散时间信号——序列在一些离散的瞬间才有定义的信号称为离散时间信号,简称为离散信号。
这里离散指信号的定义域——时间是离散的,它只是某些规定的值。
通常给出函数值的离散时刻的间隔是均匀的。
若此间隔为T ,以,2,1,0)(±±=n nT x 表示此离散时间信号,一般我们直接以)(n x 表示此序列。
n 表示个函数值在序列中出现的序号。
对应某序号n 的函数值称为在第n 个样点的“序列”。
一、离散信号的描述形式1、解析形式(闭合形式或闭式) 即用函数式表示。
例如:nn x )1(2)(1-= 2、图形形式即信号的波形。
线段的长短代表各序列值的大小。
有时可将他们的端点连接起来。
但是n 只有在整数值时才有意义。
二、序列的基本运算1、相加(相减)两序列)(),(n y n x 相加(减)即将两序列的对应序列相加(减)即可。
新序列)(n z 可表示为:)()()(n y n x n z ±=2、相乘(除)两序列)(),(n y n x 相乘(除)即将两序列的对应序列相乘(除)即可。
新序列)(n z 可表示为:)(/)()(),()()(n y n x n z n y n x n z ==3、延时(移位)指原序列逐项依次右移(左移)后给出的新序列)(n z :)()(),()(m n x n z m n x n z +=-=显然,任何离散信号)(n x 都可以看成是离散冲激信号)(n δ的移位加权相加所构成,即:∑∞-∞=-=m m n m x n x )()()(δ4、反褶自变量变为原来的相反数,波形沿纵轴反转:)()(n x n z -= 5、展缩与连续信号的展缩不同,需按规律去除某些点或补足相应的零值,因此,也称为序列的“重排”。
[例3-1] 已知)(n x 波形如图3-1(a)所示,求)2/(),2(n x n x 的波形。
解:)2(n x 波形如图3-1(b)所示,这时,对应)(n x 波形中n 为奇数的各序列已不存在,波形压缩。
而)2/(n x 波形如图3-1(c)所示,图中,对应n 为奇数值各点应补入零值,n 为偶数值各点取得)(n x 波形中依 次对应的序列,因而波形扩展。
nn图3-13.2 LTI 离散系统的响应一、离散系统差分方程常系数线性差分方程的一般形式可表示为:)()1()1()(110N n y a N n y a n y a n y a N N -++-++-+- )()1()1()(110M n x b M n x b n x b n x b M M -++-++-+=-式中,b a ,是常数,未知函数)(n y 的位移阶次N 即此差分方程的阶次。
上式可简写为∑∑==-=-Mr r Nk kr n x b k n y a)()(求解常系数线性差分方程的方法一般有以下几种:(1)迭代法:包括手算逐次带入求解或利用计算机求解。
这种方法概念清楚,也比较简单,但只能得到其数值解,不能直接给出一个完整的解析式(闭式)作为解答。
(2)时域经典法:与微分方程的时域经典法类似,先分别求齐次解与特解,然后带入边界条件求待定系数。
这种方法便于从物理概念说明各响应分量之间的关系,但求解过程比较麻烦,在解决具体问题时不宜采用。
(3)分别求零输入响应与零状态响应:可以利用求齐次解的方法得到零输入响应,利用卷积和(卷积)的方法求零状态响应。
(4)变换域方法:类似与连续系统的拉氏变换,利用z 变换方法解差分方程。
本章着重介绍时域中求齐次解的方法和卷积方法。
下一章详细研究z 变换方法。
第十二章研究离散时间系统状态方程得求解。
一般差分方程的齐次方程的形式:0)(0=-∑=Nk kk n y a二、齐次解的求法(1)特征根没有重根的情况下,差分方程的齐次解为:nN N n n C C C n y ααα+++= 2211)(其中,N ααα ,,21为差分方程的特征根,即它应满足:00=∑=-Nk kn k a α。
N C C C ,,21是由边界条件决定的系数。
现举例说明求齐次方程的过程。
[例3-4] 已知差分方程为0)2()1()(=----n y n y n y ,1)2(,1)1(==y y ,求方程的解。
解:特征方程为:012=--αα求得特征解:251,25111-=+=αα 于是写出齐次解为:nn C C n y ⎪⎪⎭⎫⎝⎛-+⎪⎪⎭⎫ ⎝⎛+=251251)(21将1)2(,1)1(==y y 分别代入,得到方程组:⎪⎪⎩⎪⎪⎨⎧⎪⎪⎭⎫ ⎝⎛-+⎪⎪⎭⎫ ⎝⎛+=⎪⎪⎭⎫⎝⎛-+⎪⎪⎭⎫ ⎝⎛+=22212125125112512511C C C C可求出系数:51,5121-==C C因此:nnn y ⎪⎪⎭⎫⎝⎛--⎪⎪⎭⎫ ⎝⎛+=2515125151)( (2)有重根的情况下,齐次解的形式将略有不同,假定1α是特征方程的K 重根,那么,齐次解中相应于1α的部分将有K 项:n K K K K C n C n C n C 112211)(α++++---[例3-5] 求差分方程)()3(8y )2(12)1(6)(n x n n y n y n y =-+-+-+的齐次解。
解:特征方程为:0812623=+++ααα 即:0)2(3=+α可见,-2是此方程的三重特征根。
于是求得齐次解为:n C n C n C n y )2)(()(3221-++=(3)特征根为共轭复数时,齐次解的形式可以是等幅、增幅或衰减等形式的正(余)弦序列。
[例3-6] 求差分方程0)4()3(2)2(2)1(2)(=-+---+--n y n y n y n y n y 的齐次解。
已知边界条件1)1(=y ,0)2(=y ,1)3(=y ,1)5(=y 。
解:特征方程为:01222234=+-+-αααα0)1()1(22=+-αα特征根为:121==αα,j j -==43,αα因此:nn n j C j C C n C n y )()()1)(()(4321-+++=242321ππn jn jeC eC C n C -+++=⎪⎭⎫⎝⎛+⎪⎭⎫⎝⎛++=2sin 2cos 21ππn Q n P C n C 这里,)(,4343C C j Q C C P -=+=,利用边界条件:⎪⎪⎩⎪⎪⎨⎧++==-+==-+==++==QC C y Q C C y P C C y Q C C y 212121215)5(13)3(12)2(0)1(1 解得:0,1,1,021====Q P C C最后求得差分方程的解为:⎪⎭⎫⎝⎛+=2cos 1)(πn n y 三、特解的求法为求得特解,首先将激励函数代入方程式右端(自由项),观察自由项的函数形式来选择含有待定系数的特解函数式,将此特解函数代入方程后再求待定系数。
与微分方程的n t 和t e 形式对应,若自由项为kn 形式的函数,则特解选为:k k k D n D n D +++- 110;若自由项为n a 形式的函数,且a 不是此差分方程的特征根,则特解选为:nDa 。
[例3-7] 求差分方程)1()()1(2)(--=-+n x n x n y n y 的完全解。
其中激励函数2)(n n x =,且已知1)1(-=-y 。
解:(1)首先,求得它的齐次解为:nC )2(-;(2)将激励信号代入方程右端,得到自由项为12)1(22-=--n n n 。
特解可设为:10D n D +,代入差分方程,可得:12233])1([20101010-=-+=+-++n D D n D D n D D n D 对应项系数相等求得:91,3210==D D 因此完全解可表示为:9132)2()(++-=n C n y n(3)利用边界条件求系数:913221)1(1+--=-=-C y ; 98=C最后写出完全响应:9132)2(98)(++-=n n y n 四、系统响应的分解与连续时间系统的情况类似,线性时不变离散时间系统的完全响应也可分解为自由响应分量和强迫响应分量,或者零输入响应分量与零状态响应分量。
须指出,差分方程边界条件不一定由增序列)1(,),1(),0(-N y y y 给出,对于因果系统,常给定减序列)(,),2(),1(N y y y --- 为边界条件。
若激励信号在0=n 时接入系统,所谓零状态是指),1(-y)(,),2(N y y -- 都等于零,而不是指)(,),1(),0(N y y y 为零。
如果已知)(,),2(),1(N y y y --- ,欲求)(,),1(),0(N y y y ,可利用迭代法逐次求出。
[例3-8] 已知差分方程)(05.0)1(9.0)(n u n y n y =--,求(1)0)1(=-y ;(2)1)1(=-y 系统的全响应。
解:(1)由于激励在0=n 接入,且给定0)1(=-y ,因此,起始时刻系统处于零状态,由迭代法可求得:05.0)0(=y 。
由特征方程求得齐次解为nC )9.0(,根据自由项的形式,设特解为D ,将特解代入方程得到:(10.9)0.05;0.5D D -==因此:5.0)9.0()(+=nC n y将05.0)0(=y 代入,可求得:45.0-=C最后,写出完全响应:)(]5.0)9.0(45.0[)(n u n y n+⨯-=(2)先求零状态响应。